Abstract:
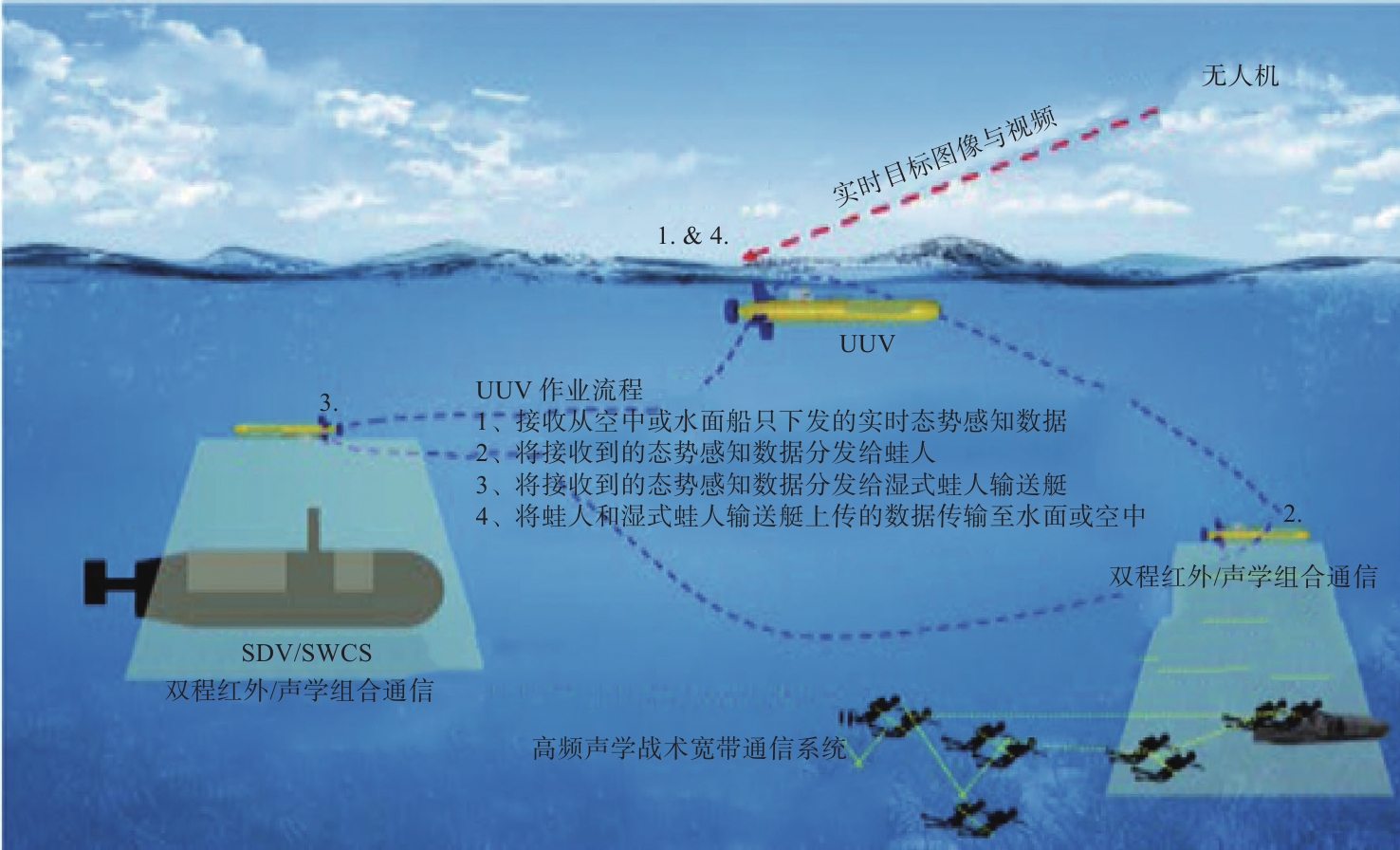
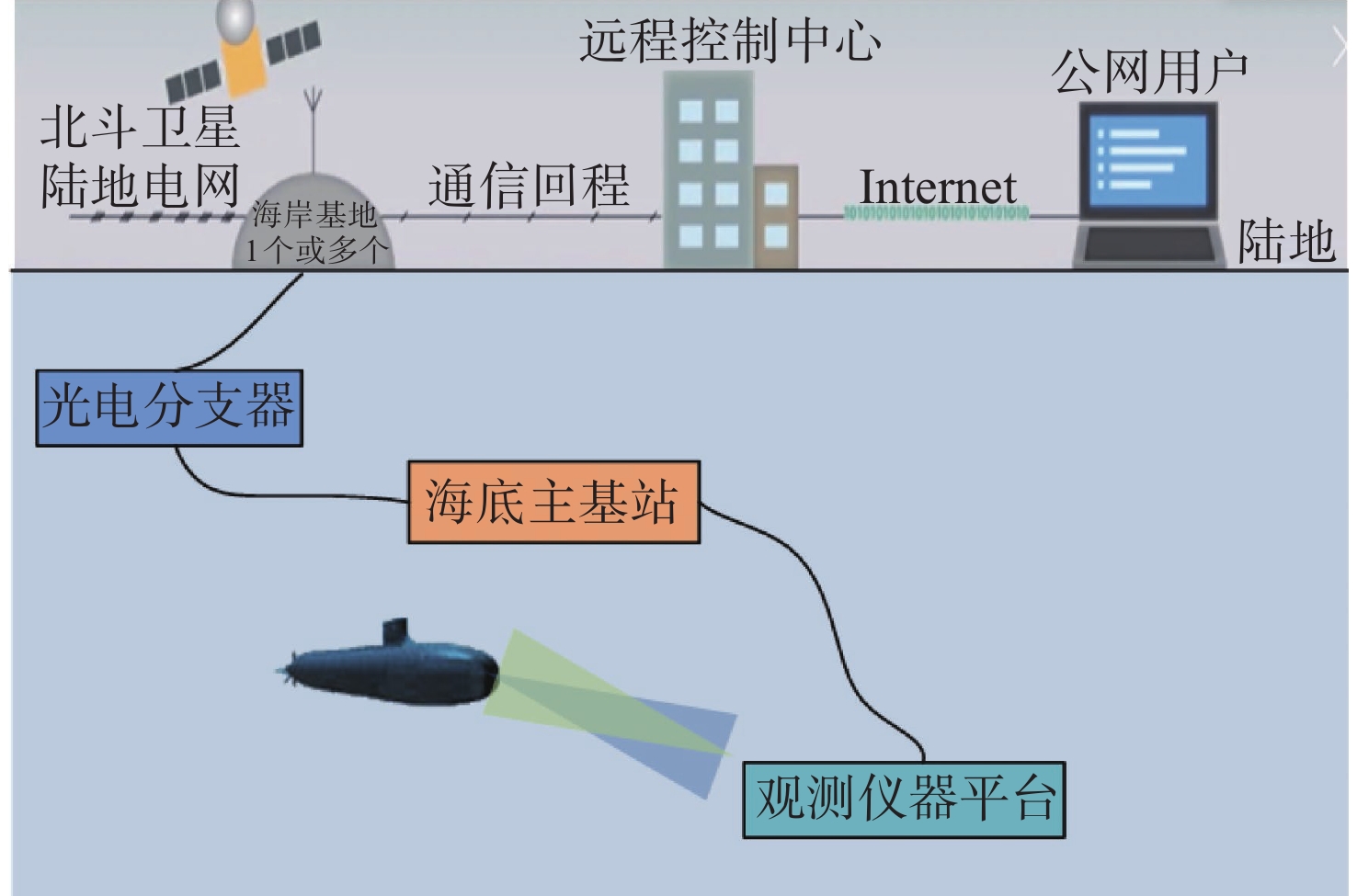
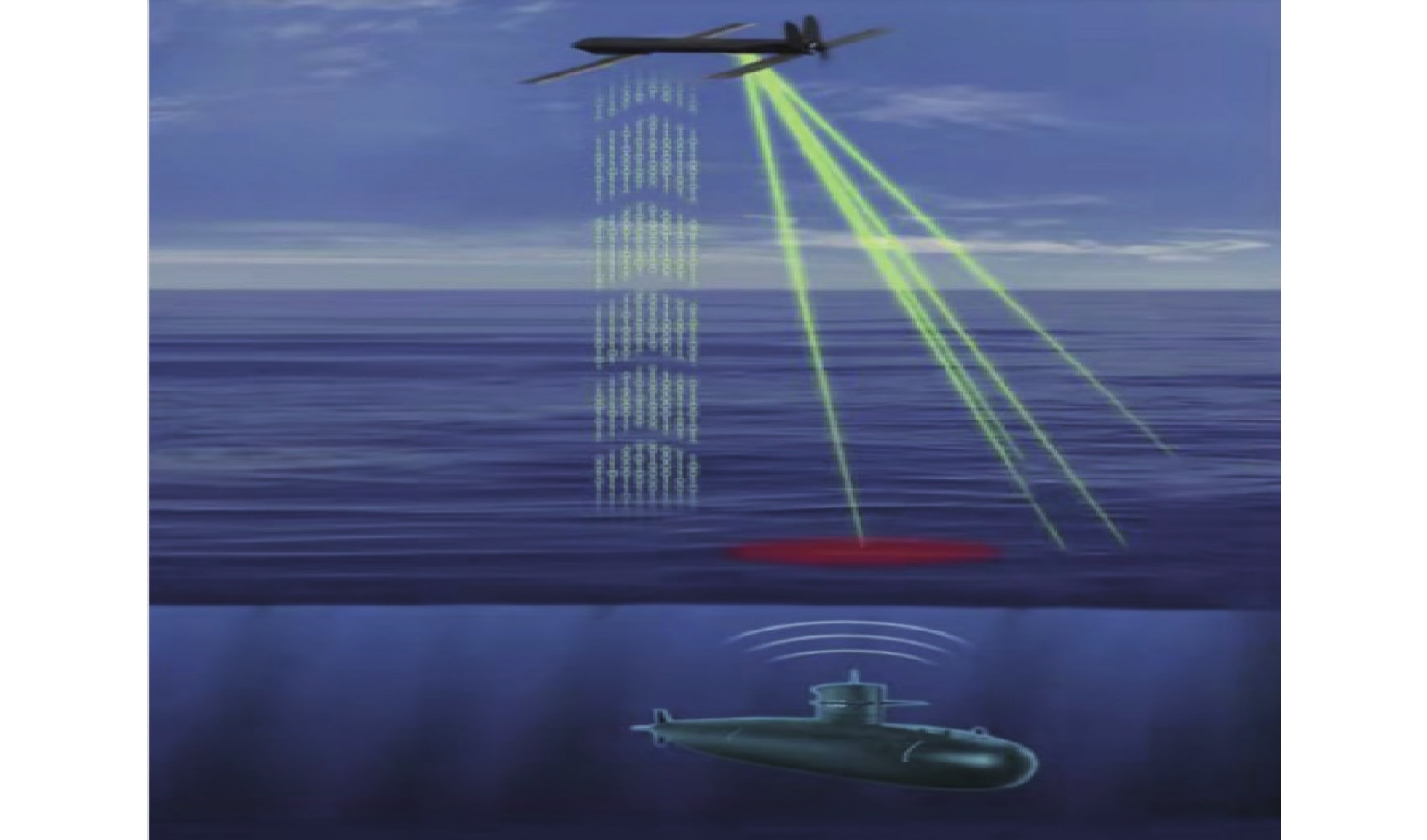
Underwater visible light communication is a technology that can realize two-way high-speed underwater communication in underwater warfare information systems, suitable for the protection of unmanned undersea vehicle(UUV) reconnaissance information, UUV cluster collaboration, diver special operation collaboration, and cross-domain operation information transmission requirements. It can also be used to realize high-speed hidden underwater battlefield information transmission. This paper analyzes the current state of underwater visible light communication technology and discusses the key technologies for implementing visible underwater visible light communication systems. It includes underwater light background noise impact analysis and suppression technology, seawater turbulence impact analysis and suppression technology, coding gain technology, and underwater optical antenna tracking and aiming technology. This paper also analyzes the application of underwater visible light communication technology in underwater warfare systems and discusses the technological directions of optical channel measurement, adaptive optical communication, receiver optical array, large light emitting diode communication optical system, and chain building and holding that need to be breakthroughs in the future. This study can provide a reference for future technological and equipment development for underwater visible light communication.



 Taobao
Taobao
 Micro
Micro