Abstract:
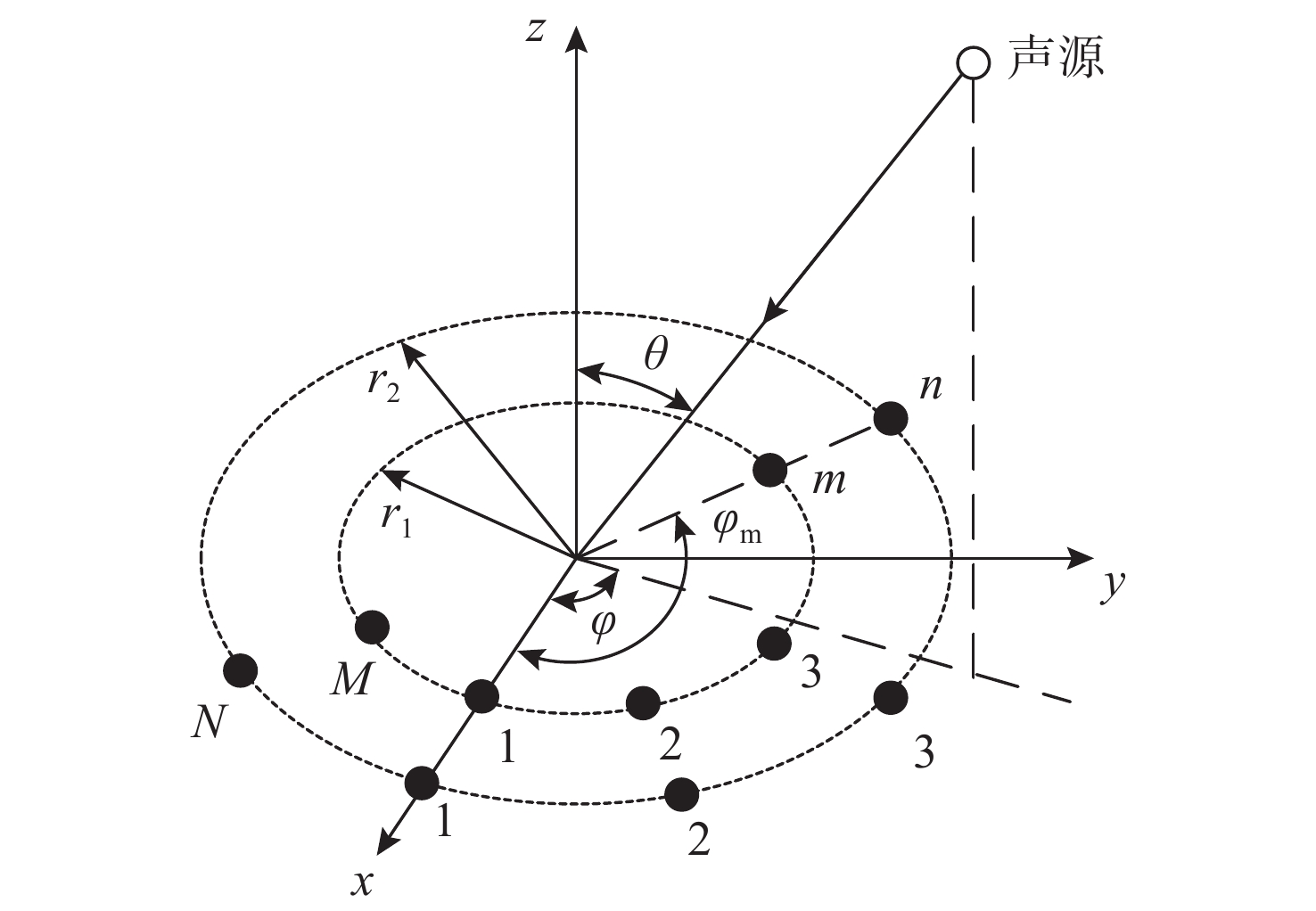
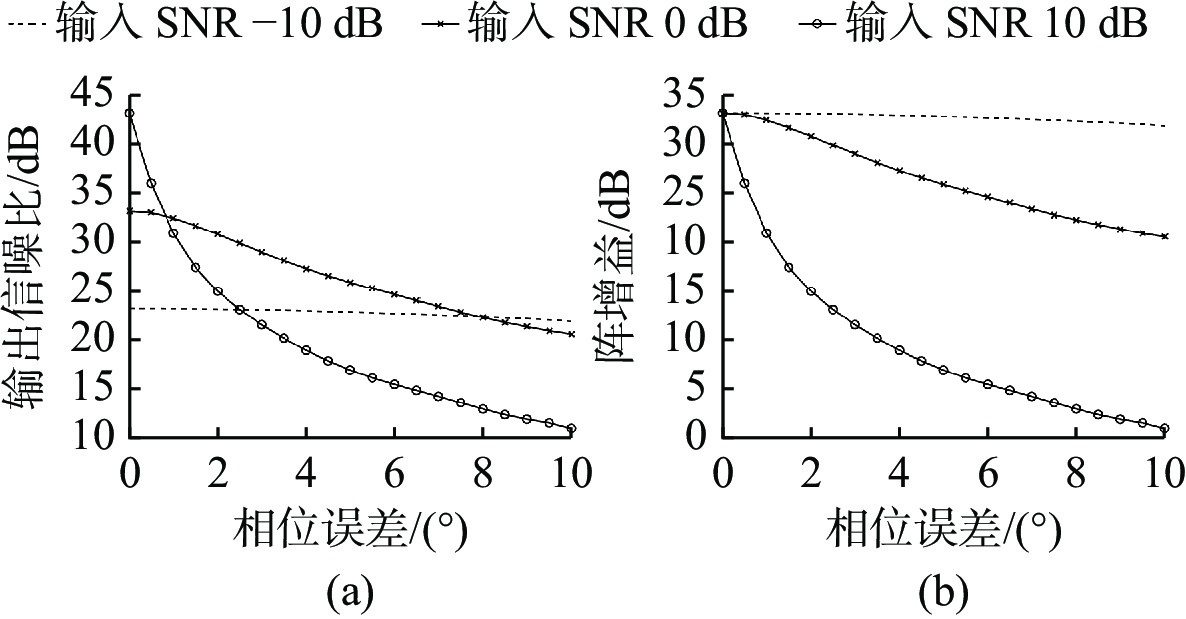
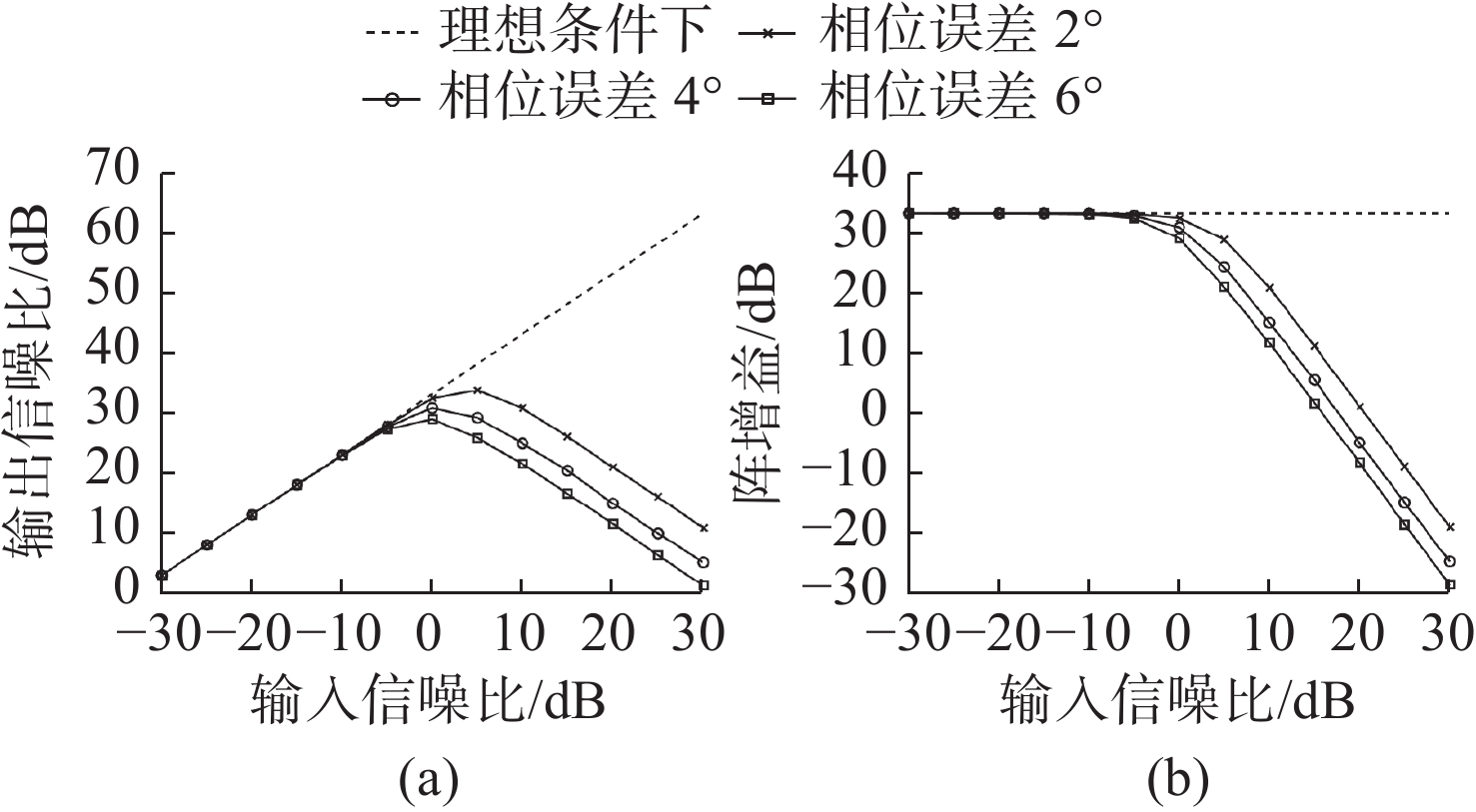
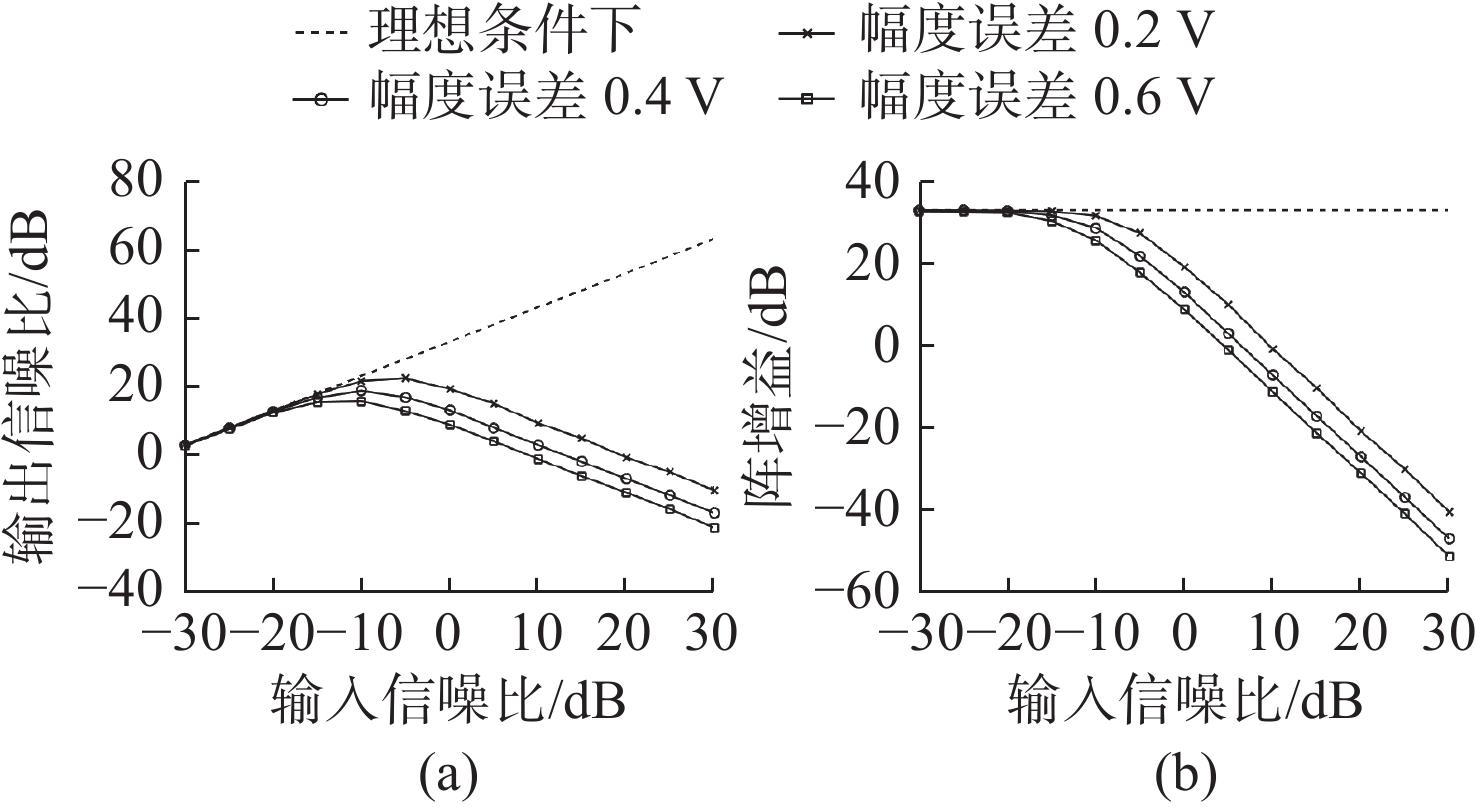
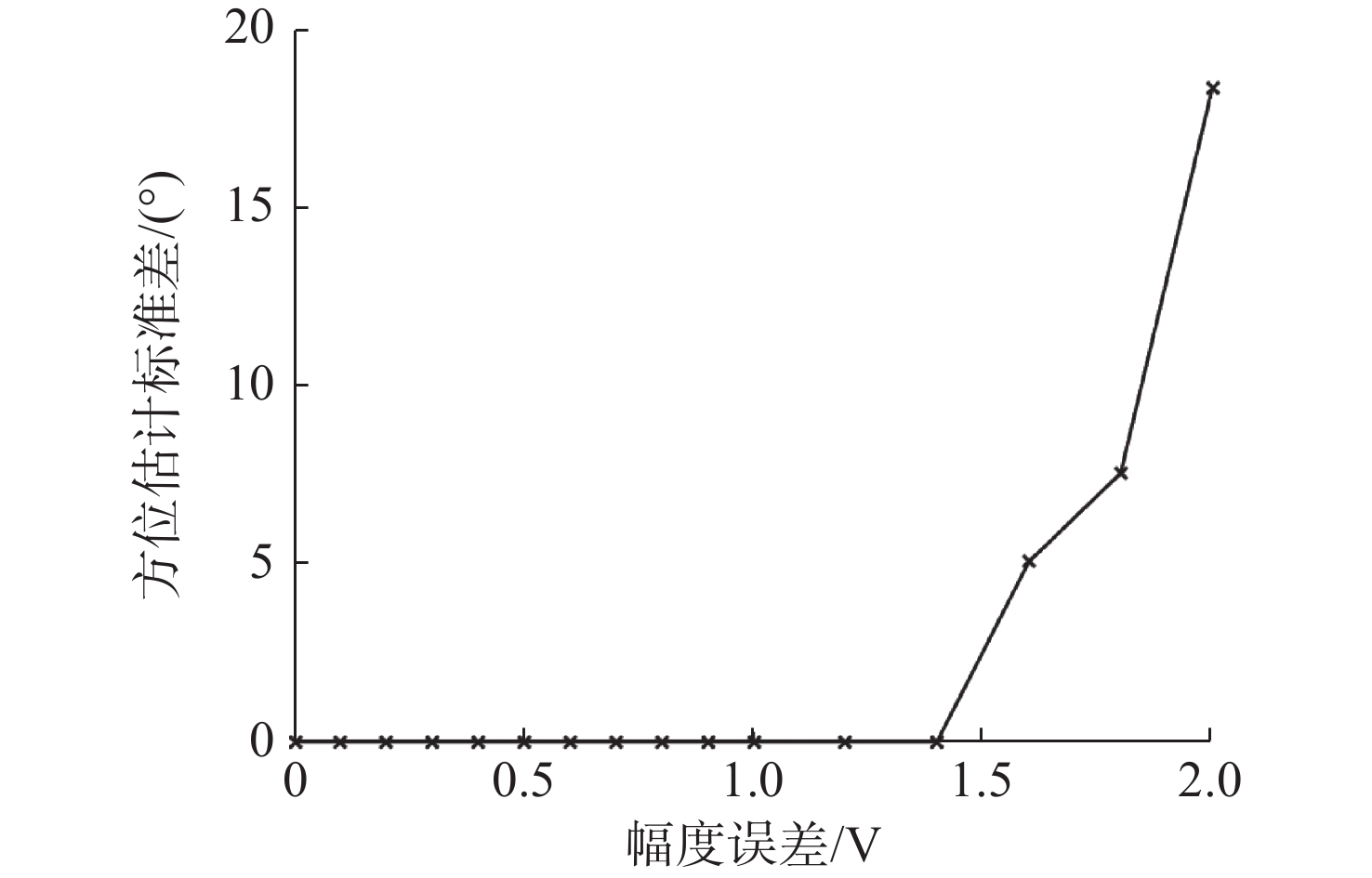
Volume array is a kind of three-dimensional array composed of multiple hydrophones, which can increase the aperture of the receiving array of the submarine target and obtain a large spatial gain. In engineering, it is often made into an array with the function of folding and expanding for dropping sonar at low frequency. Because the parameters and amplitude gain of the devices in each hydrophone channel are inconsistent, there are amplitude-phase errors between the signals received by each element of the volume array. In this study, a double-ring volume array model with amplitude-phase errors was established, and the effects of the amplitude-phase errors on the covariance matrix, as well as the output signal-to-noise ratio(SNR), array gain, and azimuth estimation accuracy of the minimum variance distortionless response(MVDR) beamformers, were statistically analyzed. The computer simulation results show that the existence of array amplitude-phase error will reduce the output SNR and array gain of MVDR beamformers. For phase error, when the input SNR is above −5 dB, the effect becomes more and more obvious with the increase in the input SNR. As for the amplitude error, when the input SNR is above −10 dB, the amplitude error has a more significant effect on the output SNR and array gain of MVDR beamformers. Moreover, the azimuth estimation accuracy of MVDR beamforming is more sensitive to the phase error than the amplitude error.



 Taobao
Taobao
 Micro
Micro