Abstract:
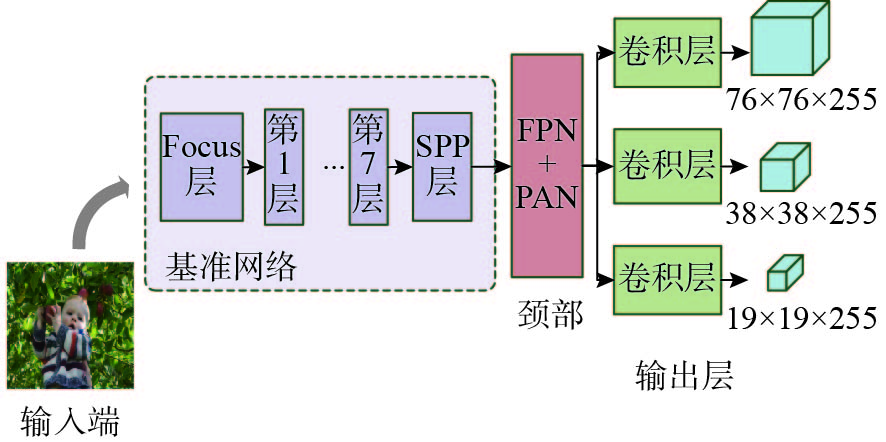
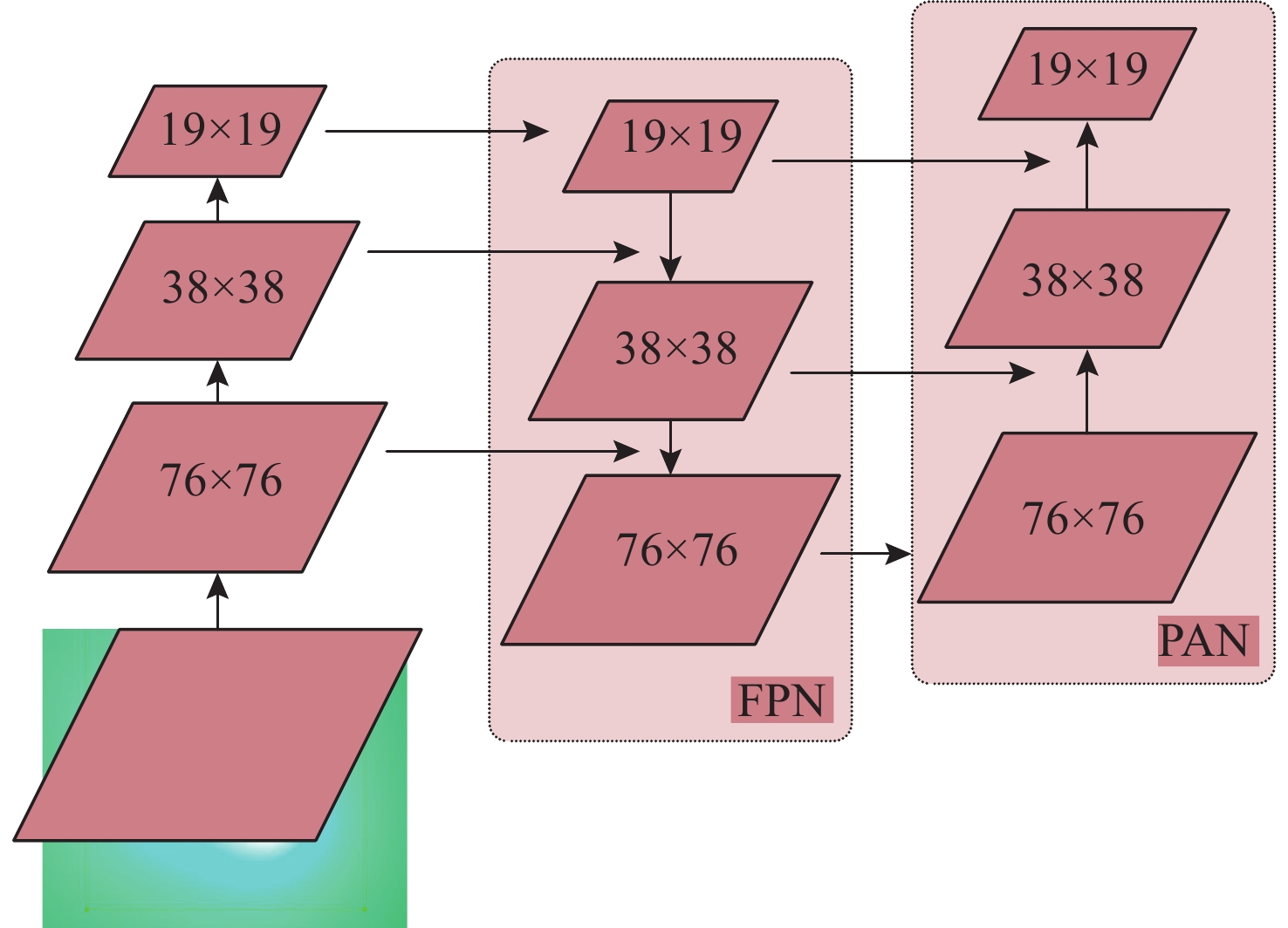
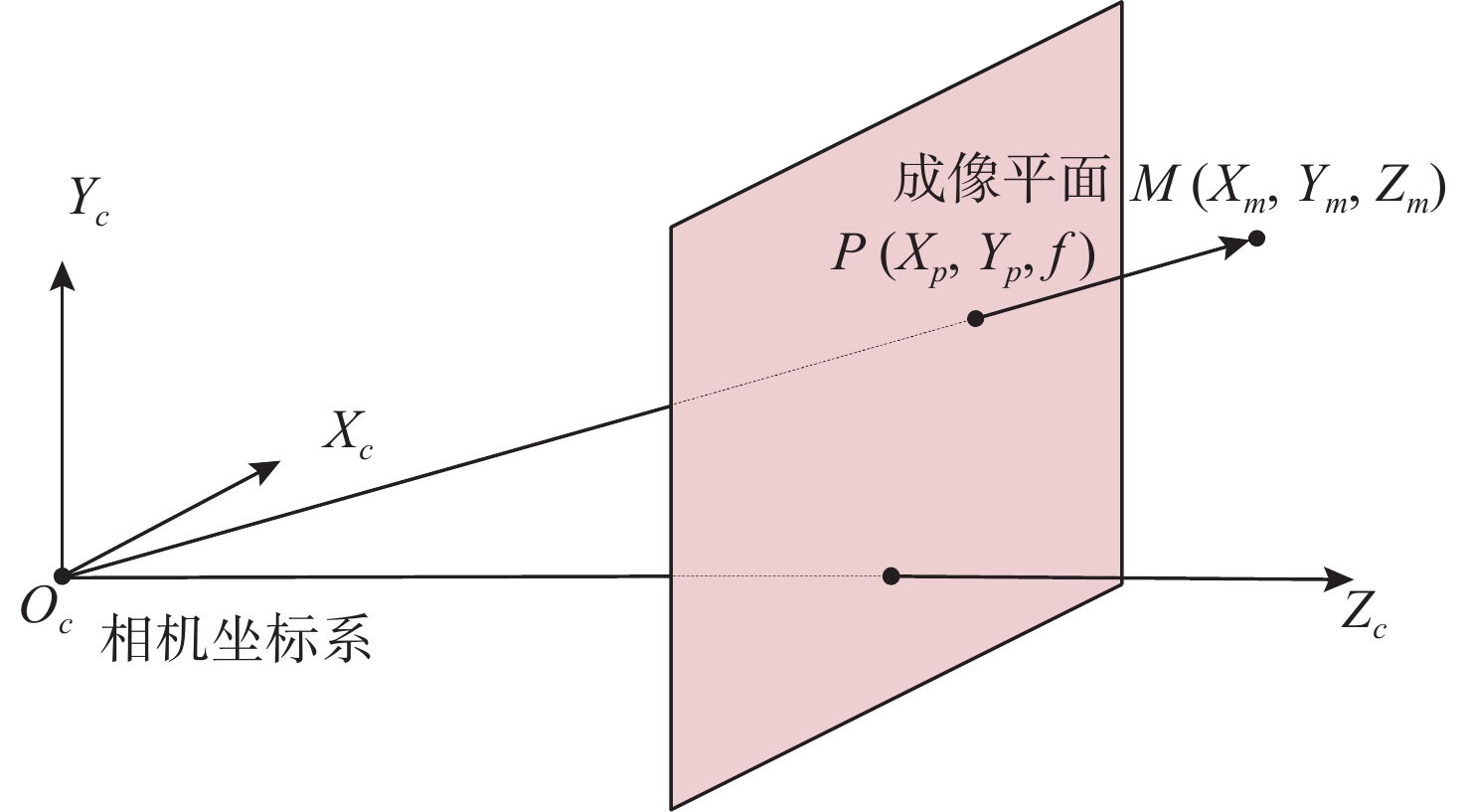
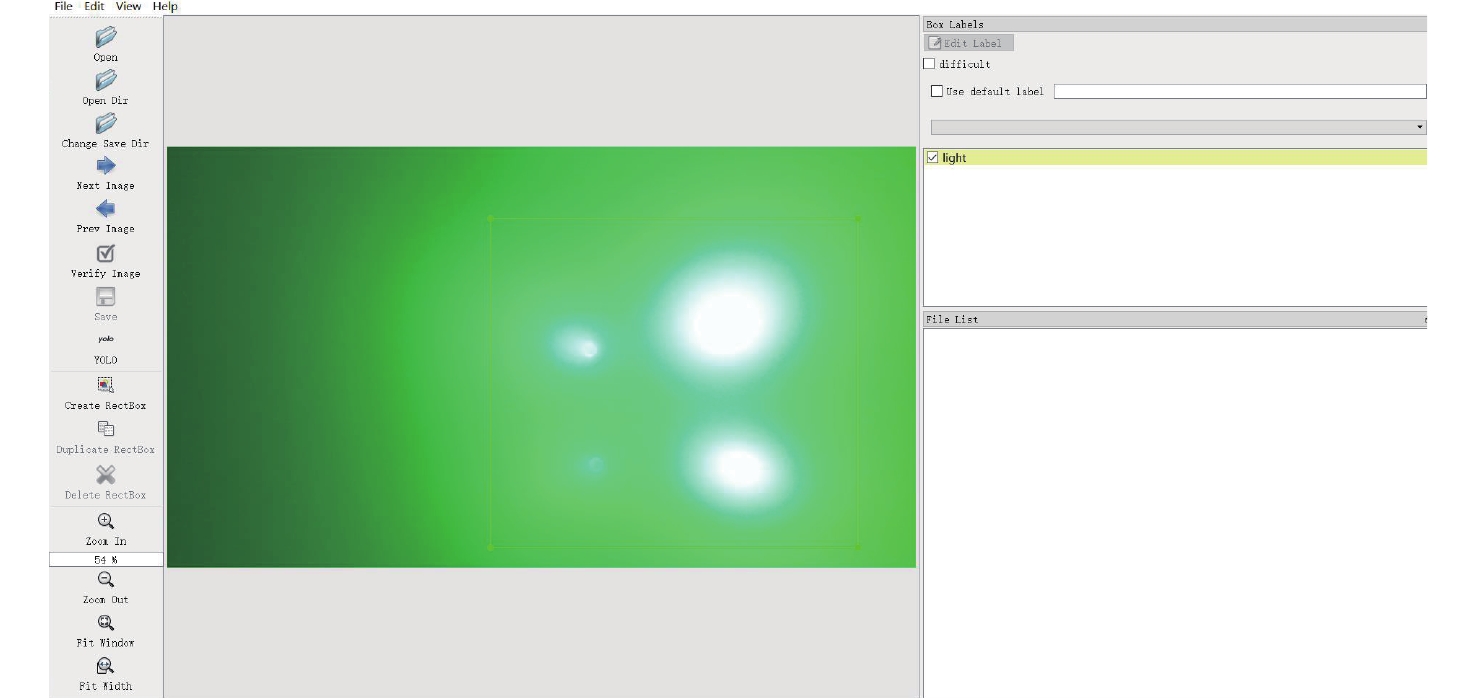
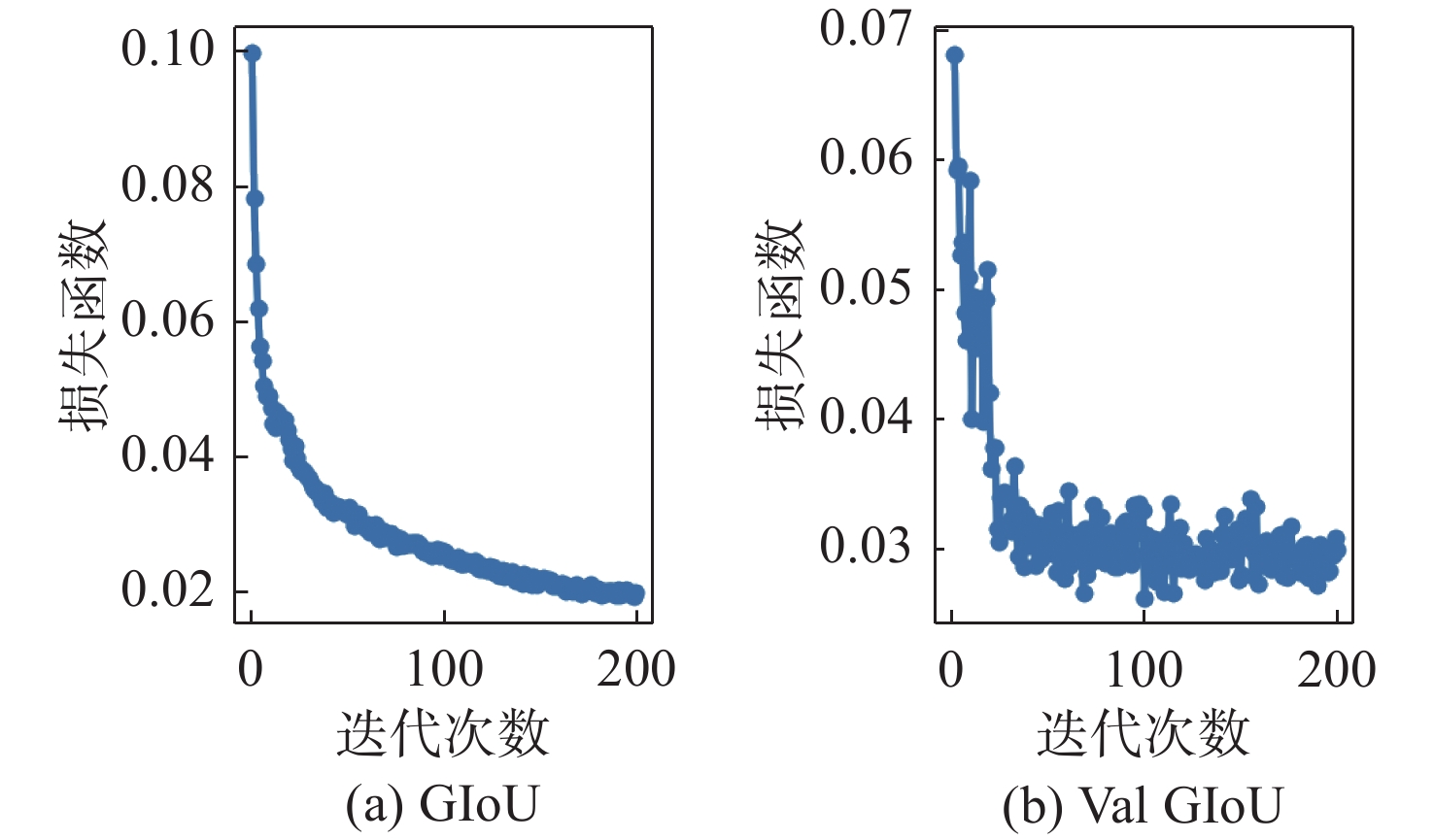
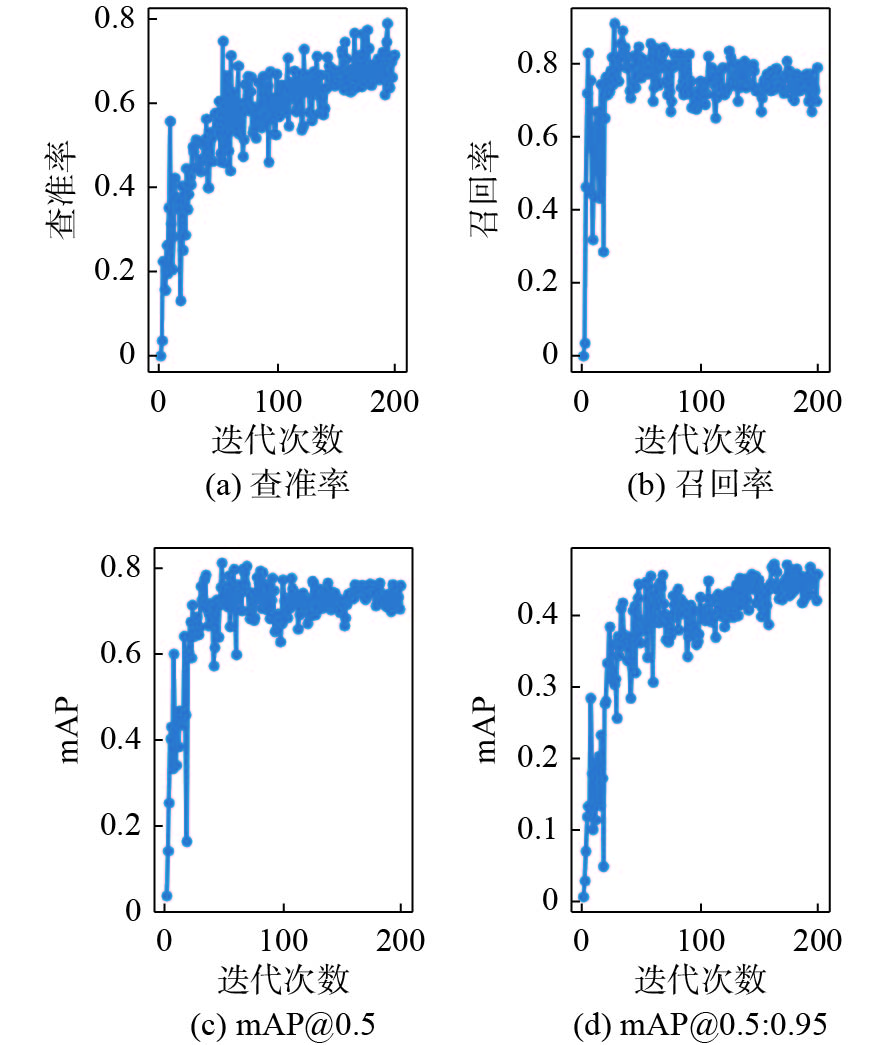
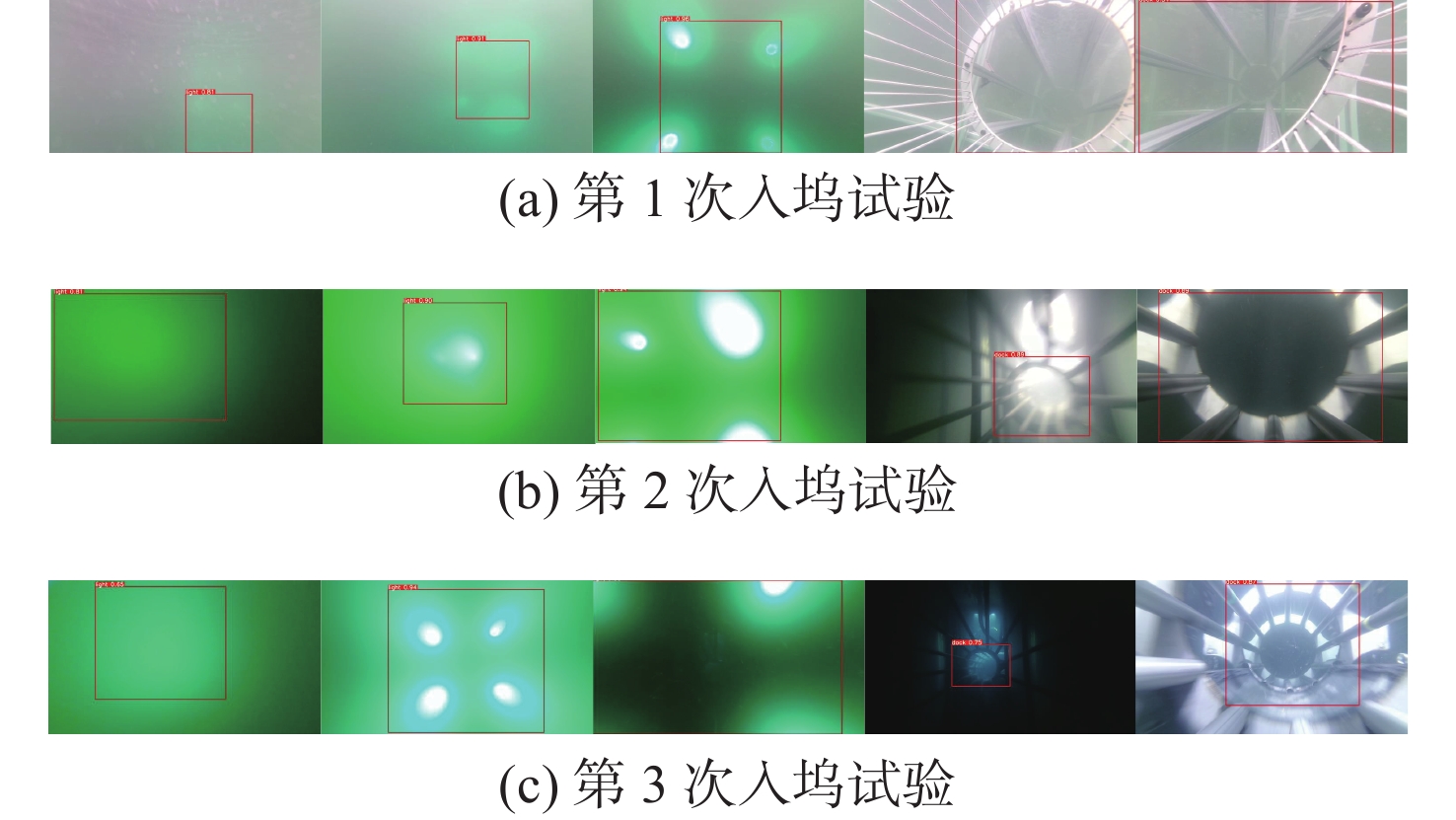
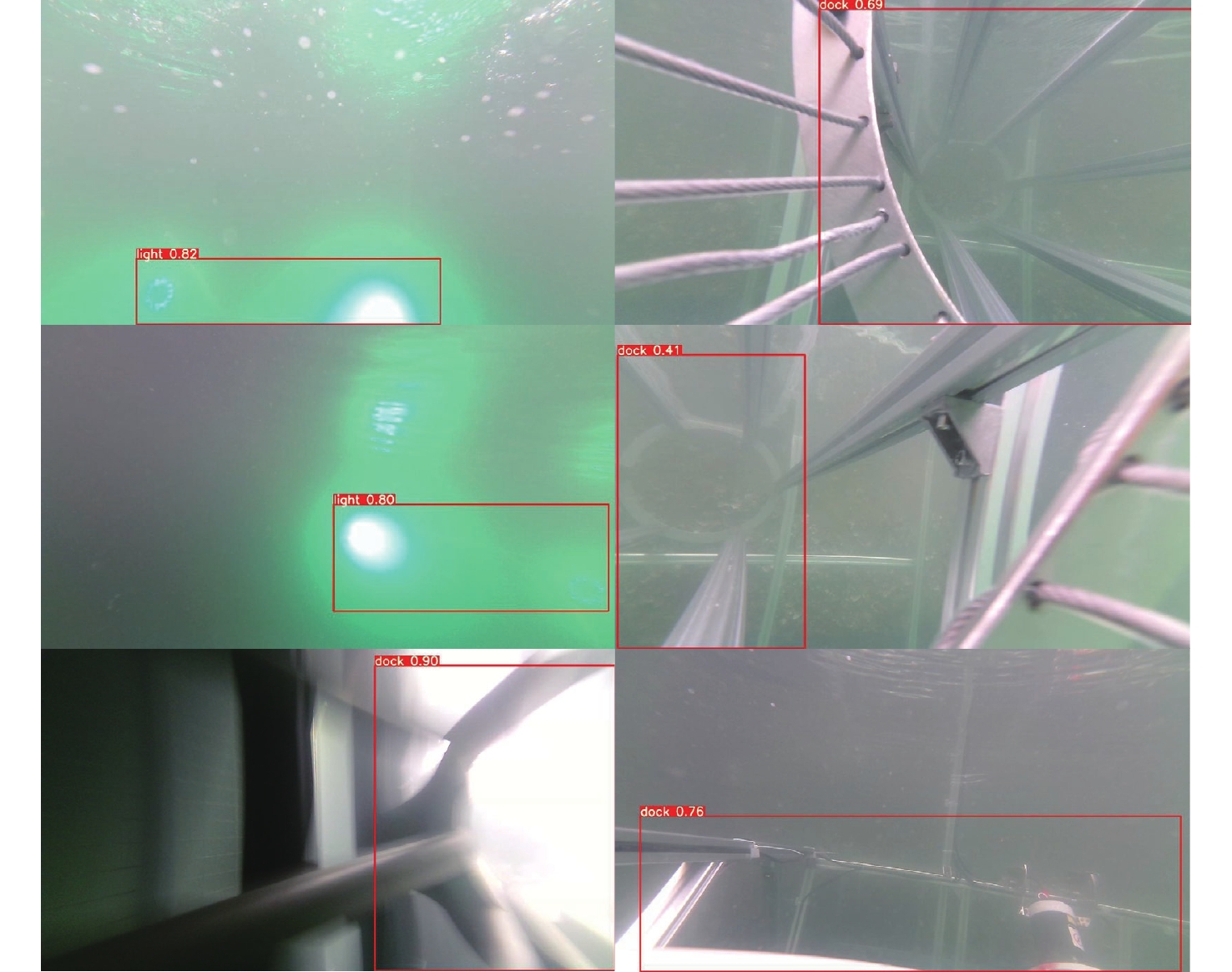
The autonomous docking and recovery of autonomous undersea vehicle(AUV) technology mainly realizes the autonomous homing, approaching, docking, and locking of the AUV and the docking device by means of guidance and positioning. To satisfy the requirements of real time, high accuracy, and robustness in the process of AUV underwater autonomous docking, an underwater visual guidance detection method based on deep learning is proposed. To address the poor detection effect of traditional image processing methods in complex underwater scenes, the guiding light source and docking device are detected by employing a deep learning visual guidance detection method based on the YOLO(you only look once)v5 model. First, the object images are sent to YOLOv5 model for iterative training, and the optimal model parameters obtained from the training are saved for subsequent real-time detection. Subsequently, in the underwater autonomous docking process, the AUV utilizes the robot operating system(ROS) platform to read the underwater data and call the YOLO service to detect the underwater image in real-time, thereby outputting the location information of the guidance light source and the docking device. Based on position calculation, the detected center coordinates are transformed into the AUV camera coordinate system. Finally, the relative positions of the AUV with respect to the docking device and navigation directions of the AUV are calculated continuously and fed back into the AUV, which provides real-time guidance information until the docking progress is completed. In the sea trail, the actual accuracy of underwater visual guidance detection was 97.9%, and the detection time of a single frame was 45 ms. The test results demonstrate that this method meets the requirements of real-time underwater docking accuracy for autonomous docking and recovery technology, and has practical application value.



 Taobao
Taobao
 Micro
Micro