

Key Technologies of Underwater Wireless Optical Communication for UUV Swarm Applications
-
摘要: 无人水下航行器(UUV)集群协同是未来海洋任务的核心能力, 其实现高度依赖于稳定、高效的水下通信技术。水下无线光通信(UWOC)以其高带宽、低延迟等优势, 成为中近距离水下互联的理想解决方案, 然而UUV高速运动引起的动态对准困难与信道衰落问题严重制约了其实际应用。针对上述问题, 文中面向UUV集群的“动中通”需求, 提出了一种集成化UWOC系统框架, 通过宽角域周视大功率发射与多路分集高灵敏度接收的协同设计, 突破运动条件下链路维持与信号稳定接收的技术瓶颈。基于该框架研制原理样机, 并开展系列实验验证。结果表明: 在15.5 m距离、衰减系数约0.54 m−1的水质中, 系统可实现2 Mbit/s速率的稳定通信(比特误码率小于10−3); 在10 m距离、衰减系数约0.85 m−1水质及5 kn 航速条件下, 丢包率低于2%。研究结果实现了UWOC技术在高机动、多自由度回转体UUV平台上的初步应用, 为UUV集群协同控制与高速信息交互提供了有效的技术支撑。Abstract: Unmanned undersea vehicle(UUV) swarm cooperation is a core capability for future marine operations, highly dependent on stable and efficient underwater communication technology. Underwater wireless optical communication(UWOC), with its high bandwidth and low latency, serves as an ideal solution for medium-to-short-range underwater linking. However, the dynamic alignment and channel fading caused by high-speed UUV motion significantly restrict its practical application. To address these challenges, this study proposed an integrated UWOC system framework aimed at the “communication on the move”(COTM) requirement of UUV swarms. The system employed a cooperative design of wide-angle panoramic high-power transmission and multi-channel diversity high-sensitivity reception, overcoming the technical bottlenecks of link maintenance and stable signal reception under motion conditions. A prototype was developed and experimentally validated. The results show that in water with an attenuation coefficient of approximately 0.54 m−1 over a distance of 15.5 m, the system achieves stable communication at 2 Mbit/s(bit error rate is less than 10−3). Under conditions of 10 m distance, attenuation coefficient of about 0.85 m−1, and UUV speed of 5 kn, the packet loss rate remains below 2%. This work demonstrates the preliminary application of UWOC technology on highly maneuverable multi-degree-of-freedom UUV platforms, providing effective technical support for UUV swarm coordination and high-speed information exchange.
-

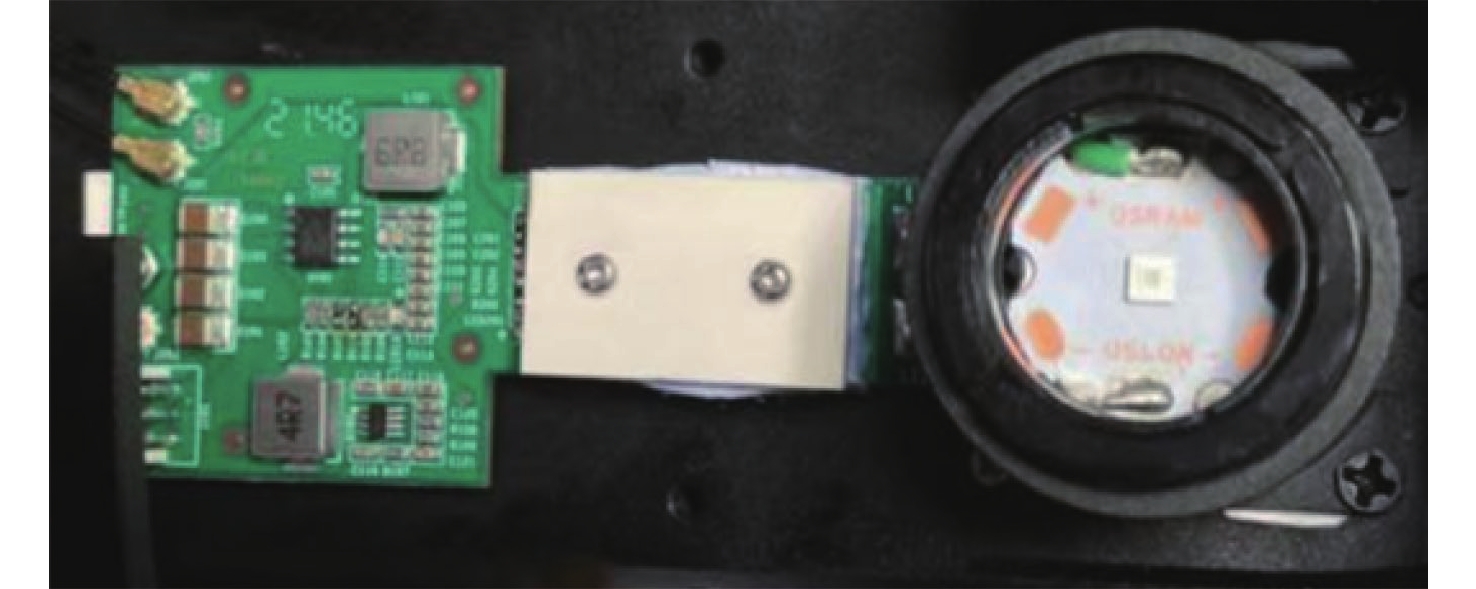
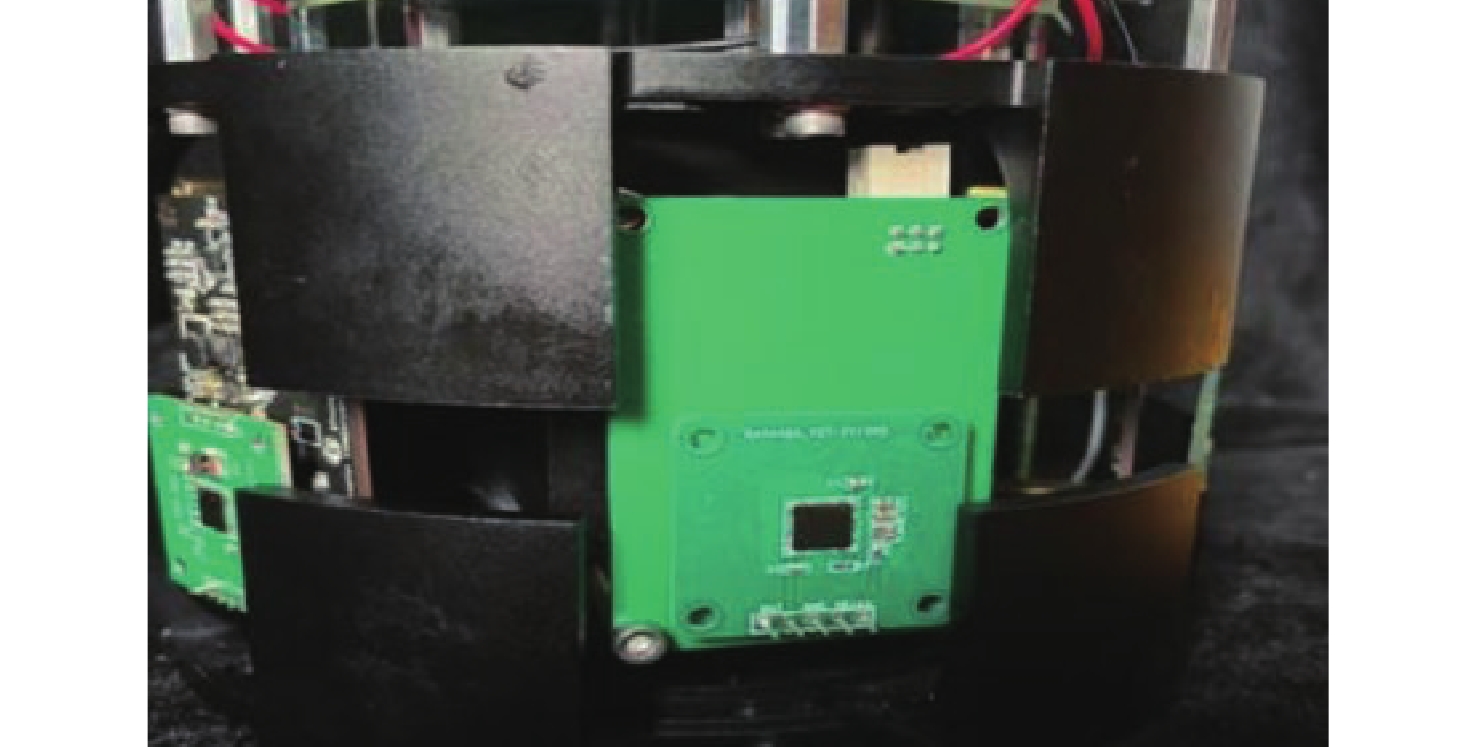
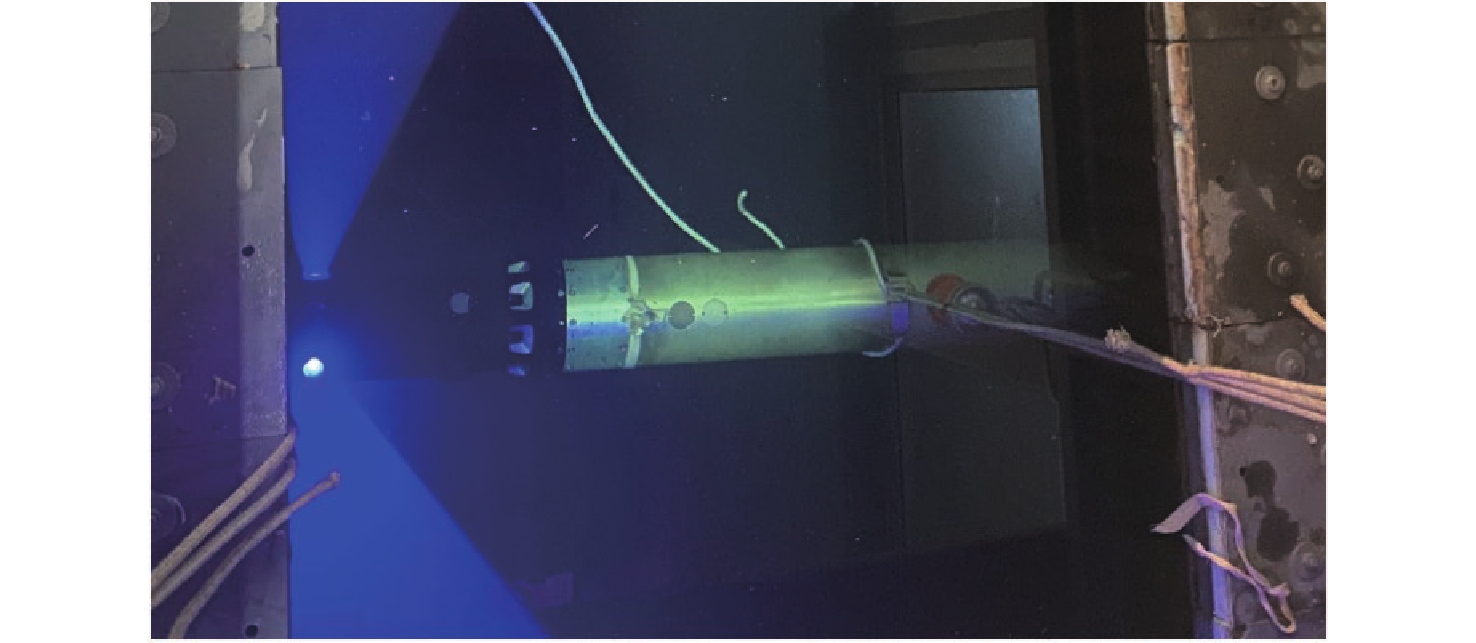
图 1 搭载所研制无线光通信段的UUV实物图
Figure 1. Physical image of the developed UUV equipped with the wireless optical communication module
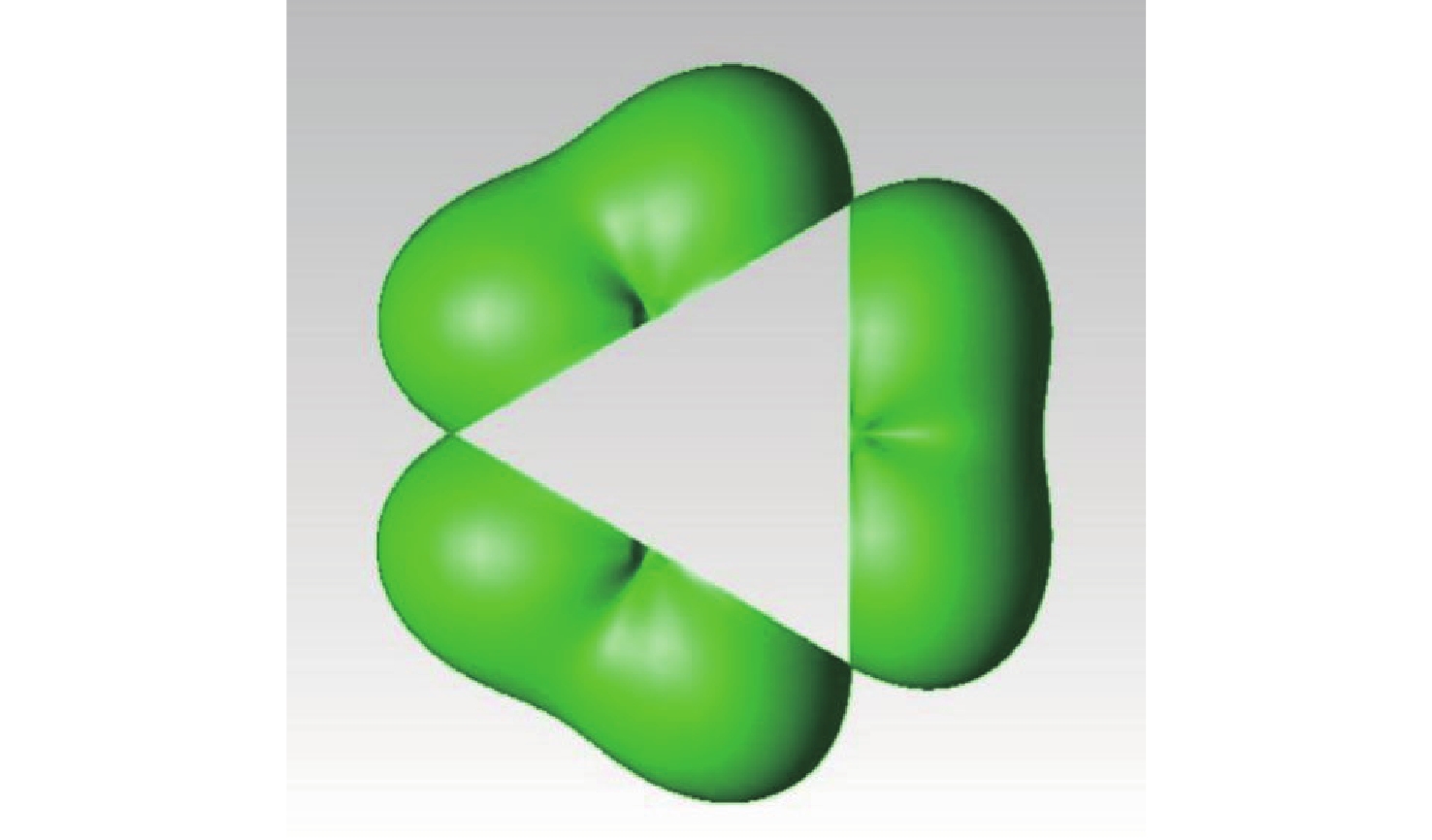
图 2 矩形均匀光斑自由曲面透镜实体模型
Figure 2. Entity model of the freeform lens for rectangular uniform spot
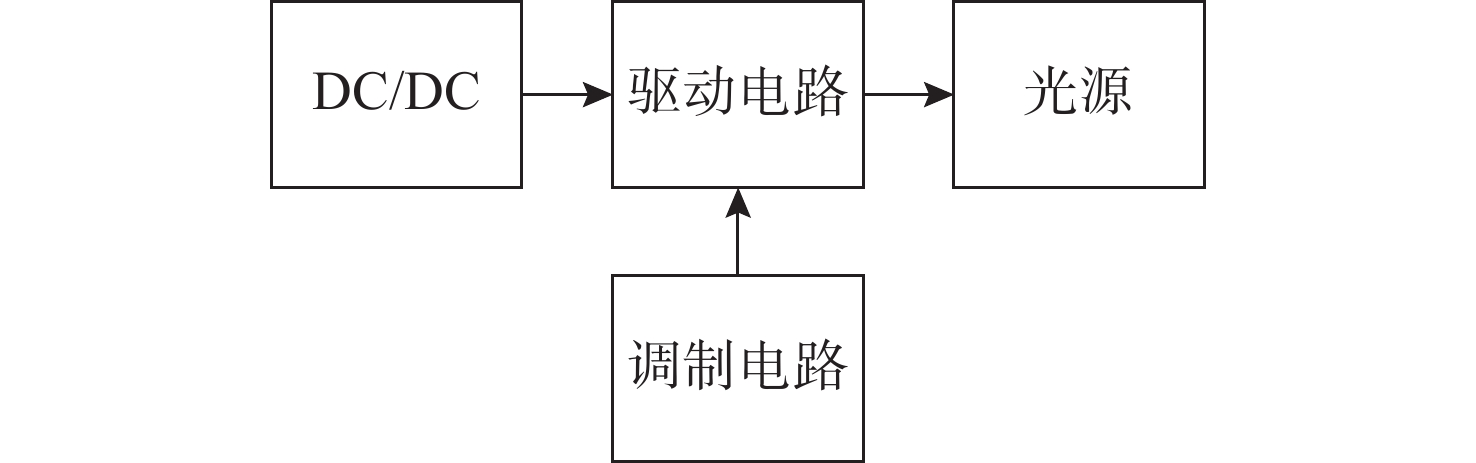
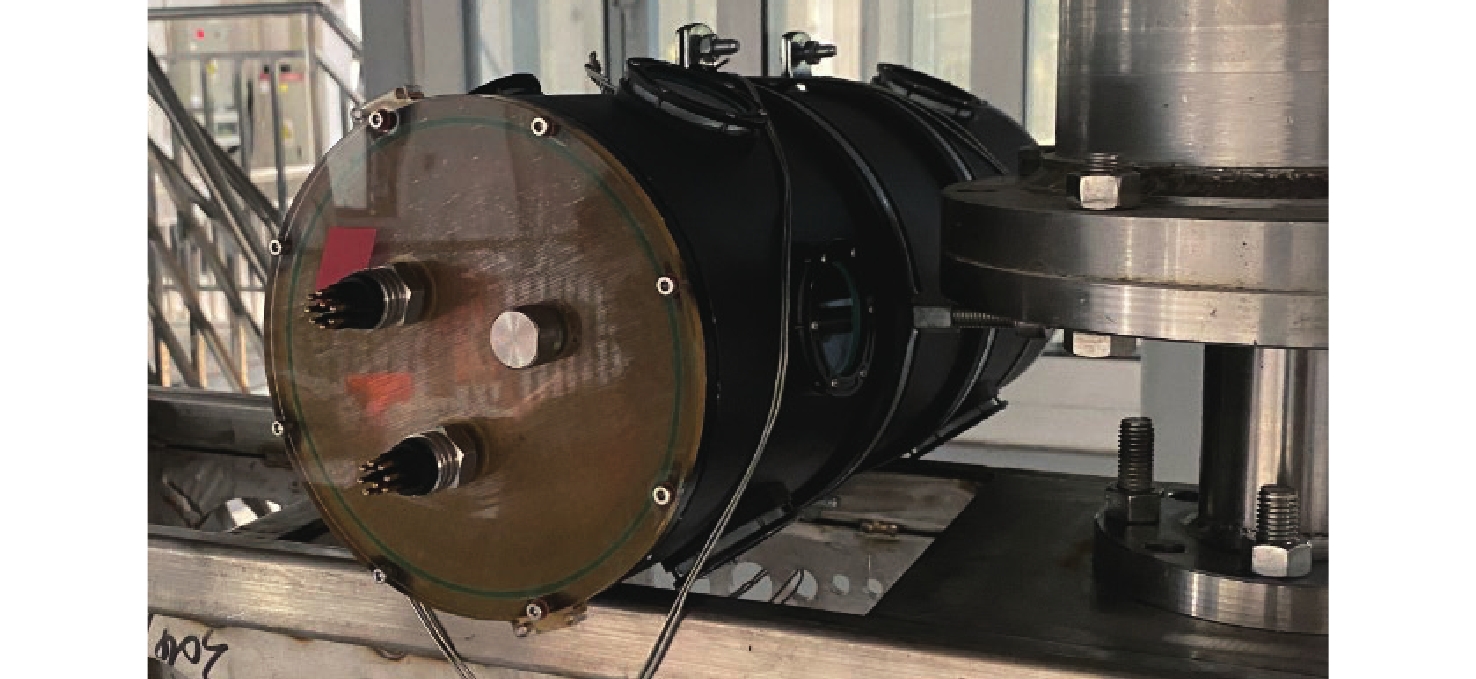
图 4 全向发射天线结构示意图
Figure 4. Schematic diagram of the omnidirectional transmitting antenna

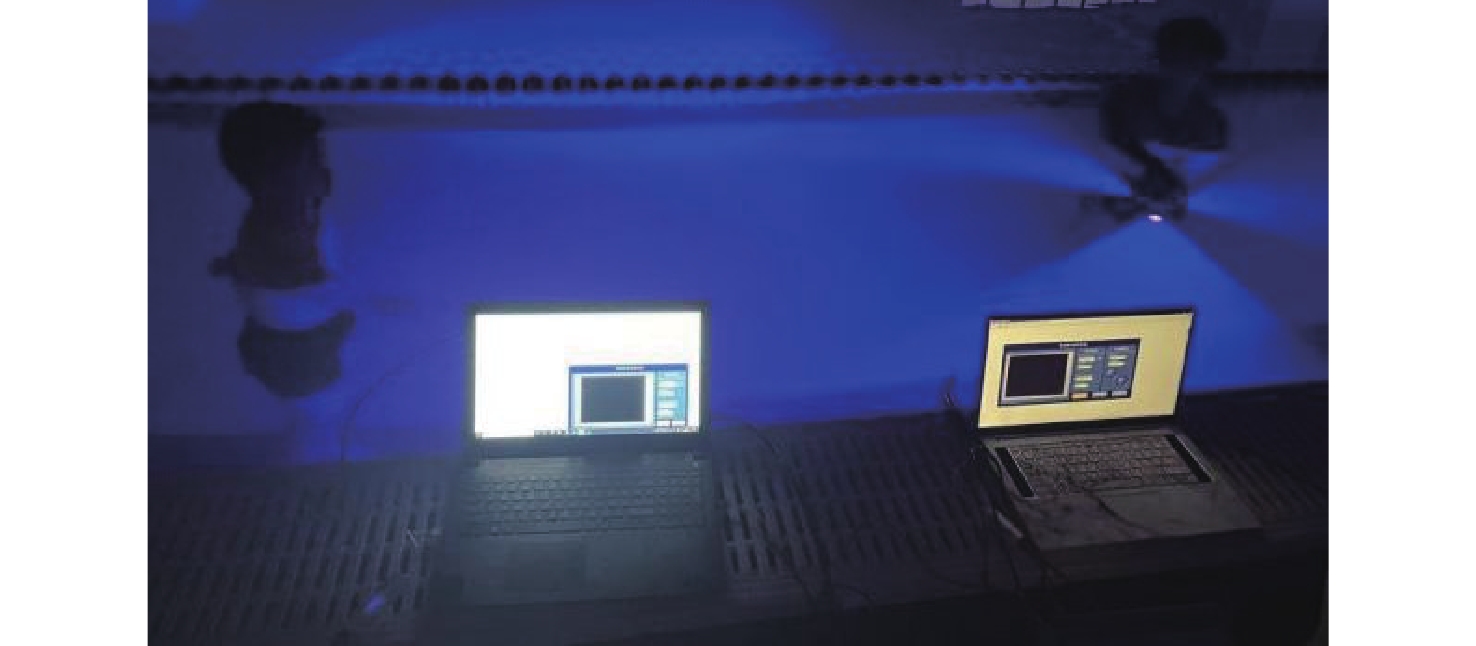
图 11 水池通信实验场景
Figure 11. Photo of the underwater communication experiment scenario in a pool
表 1 动静信道下传输特性仿真比较
Table 1. Comparison of transmission characteristics under static and dynamic channels
序号 发射功率
/(dB·mW)静态接收功率
/(dB·mW)动态接收功率
/(dB·mW)1 40.0 −45.1 −45.4 2 37.0 −42.2 −42.4 3 35.0 −40.1 −40.2  下载: 导出CSV
下载: 导出CSV
表 2 不同合并算法优缺点对比
Table 2. Comparison of different combining algorithms
序号 算法 性能 复杂度 1 SC 无合并增益 低 2 EGC 合并性能稍差 中等 3 MRC 合并性能最佳 高
下载: 导出CSV
表 3 陆上通信实验结果
Table 3. Terrestrial communication test results
序号 通信距离/m 比特误码率 1 30 0 2 40 0 3 50 0 4 60 0 5 70 0 6 80 1×10−8
下载: 导出CSV
表 4 动态通信测试结果
Table 4. Dynamic communication test results
序号 运动速度/kn 通信丢包率/% 1 3.0 0.5 2 3.5 1.0 3 5.0 2.0
下载: 导出CSV
-
[1] 陶伟, 张晓霜. 国外水下无人集群应用及关键技术研究[J]. 舰船电子工程, 2021, 41(2): 9-13, 54. doi: 10.3969/j.issn.1672-9730.2021.02.003TAO W, ZHANG X S. Research on application and key technology of underwater unmanned cluster abroad[J]. Ship Electronic Engineering, 2021, 41(2): 9-13, 54. doi: 10.3969/j.issn.1672-9730.2021.02.003 [2] 张伟, 王乃新, 魏世琳, 等. 水下无人潜航器集群发展现状及关键技术综述[J]. 哈尔滨工程大学学报, 2020, 41(2): 289-297. doi: 10.11990/jheu.201909039ZHANG W, WANG N X, WEI S L, et al. Overview of unmanned underwater vehicle swarm development status and key technologies[J]. Journal of Harbin Engineering University, 2020, 41(2): 289-297. doi: 10.11990/jheu.201909039 [3] 邱志明, 马焱, 孟祥尧, 等. 水下无人装备前沿发展趋势与关键技术分析[J]. 水下无人系统学报, 2023, 31(1): 1-9. doi: 10.11993/j.issn.2096-3920.2023-0018QIU Z M, MA Y, MENG X Y, et al. Analysis on the development trend and key technologies of unmanned underwater equipment[J]. Journal of Unmanned Undersea Systems, 2023, 31(1): 1-9. doi: 10.11993/j.issn.2096-3920.2023-0018 [4] GAO J, WANG J J, GU J L, et al. Q-learning-based routing optimization algorithm for underwater sensor networks[J]. IEEE Internet of Things Journal, 2024, 11(22): 36350-36357. doi: 10.1109/JIOT.2024.3398797 [5] ZHU W, ZENG X S, QIU Y. A routing protocol for underwater acoustic-optical hybrid wireless sensor networks based on packet hierarchy and void processing[J]. IEEE Sensors Journal, 2024, 24(4): 5203-5214. doi: 10.1109/JSEN.2023.3348757 [6] ZENG Z Q, FU S, ZHANG H H, et al. A survey of underwater optical wireless communications[J]. IEEE Communications Surveys and Tutorials, 2017, 19(1): 204-238. doi: 10.1109/COMST.2016.2618841 [7] 高卓, 汤伟江, 朱云周, 等. 微细光缆在水下航行器中的应用及关键技术综述[J]. 水下无人系统学报, 2017, 25(5): 385-395.GAO Z, TANG W J, ZHU Y Z, et al. Overview of applications of fiber optic micro-cable in undersea vehicle and key technologies[J]. Journal of Unmanned Undersea Systems, 2017, 25(5): 385-395. [8] CHE X H, WELLS I, DICKERS G, et al. Re-evaluation of RF electromagnetic communication in underwater sensor networks[J]. IEEE Communications Magazine, 2010, 48(12): 143-151. doi: 10.1109/MCOM.2010.5673085 [9] PARTAN J, KUROSE J, LEVINE B N. A survey of practical issues in underwater networks[C]//2006 First ACM International Workshop on Underwater Networks (WUWNet). Los Angeles, CA, USA: ACM, 2006: 17-24. [10] YANG L W, BI Z Y, LIANG X, et al. Advancements in underwater optical wireless communication: Channel modeling, PAPR reduction, and simulations with OFDM[J]. IEEE Photonics Journal, 2024, 16(5): 1-8. [11] FANG C W, LI S, WANG Y N, et al. High-speed underwater optical wireless communication with advanced signal processing methods survey[J]. Photonics, 2023, 10(7): 811. doi: 10.3390/photonics10070811 [12] NANDHINI DEVI, R. LEONES SHERWIN VIMALRAJ S. LYDIA J. Optical wireless communication: A survey of recent advances, applications and challenges[J]. Advances in Parallel Computing, 2021, 37: 485-489. [13] 梁静远, 王醒醒, 李征, 等. 水下无线光通信中关键技术的研究与进展[J]. 数字海洋与水下攻防, 2023, 6(2): 215-240.LIANG J Y, WANG X X, LI Z, et al. Research and development of key technologies in underwater wireless optical communication[J]. Digital Ocean & Underwater Warfare, 2023, 6(2): 215-240. [14] 赵小俊. 蓝绿激光在海水绕流中的传输特性研究[D]. 南京: 南京理工大学, 2013. [15] ISHIBASHI S, SUSUKI K I. 1 Gbps×100 m underwater optical wireless communication using laser module in deep sea[C]//OCEANS 2022. VA, USA: IEEE, 2022. [16] 查冰婷, 张合, 谭亚运. 水下激光引信回波功率研究[J]. 传感器与微系统, 2013, 32(1): 69-72,75. doi: 10.3969/j.issn.1000-9787.2013.01.020ZHA B T, ZHANG H, TAN Y Y. Study on echo power of underwater laser fuze[J]. Transducer and Microsystem Technologies, 2013, 32(1): 69-72,75. doi: 10.3969/j.issn.1000-9787.2013.01.020 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 688
- HTML全文浏览量: 300
- PDF下载量: 121
- 被引次数: 0





