A Review of Research Progress on Liquid Metal-Driven Underwater Soft Robotics
-
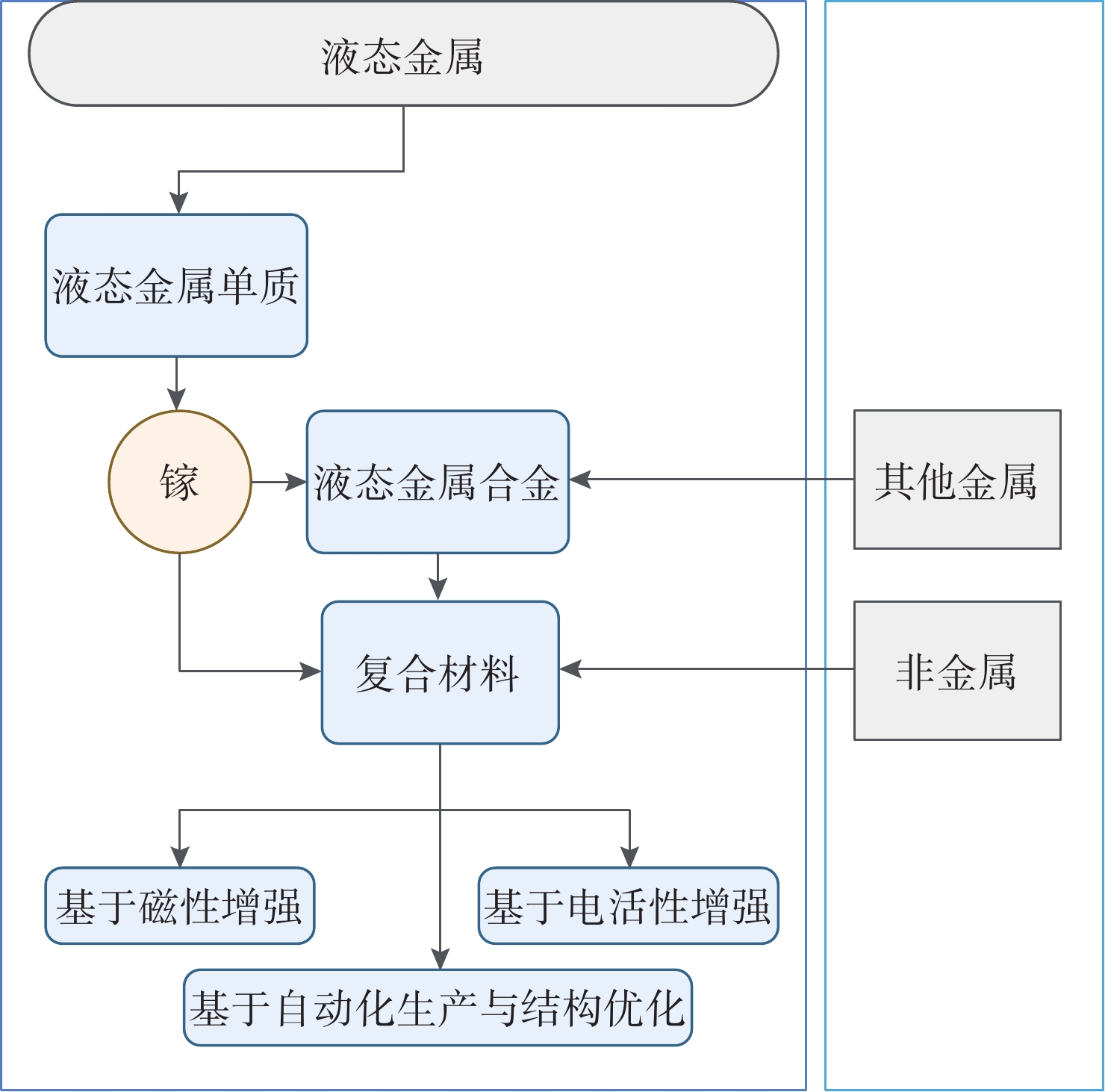
摘要: 随着软体机器人关键技术的快速发展, 液态金属因其独特的低熔点、高导电性、高导热性和良好的流动性, 成为该领域的研究热点。液态金属(如镓基合金)通过磁性增强、电活性增强和结构优化等手段显著提升了其在驱动系统中的辅助应用潜力。同时, 作为导电材料和柔性电极, 液态金属在驱动、传感和多自由度运动中也极具应用潜力。文中系统综述了液态金属的功能特性、驱动与传感技术, 并重点探讨了其在水下软体机器人中的应用现状与挑战。目前, 液态金属为电极的驱动器已实现电热驱动、电化学驱动和磁驱动等多种机制, 传感器则在高灵敏度应变检测、压力感知和多模态信号监测方面取得突破。然而, 水下应用中的多自由度运动仍面临驱动机制复杂、材料稳定性不足和控制系统不完善等技术难题。未来研究需进一步突破这些技术瓶颈, 以推动液态金属水下软体机器人的实用化进程。Abstract: With the rapid advancement of key technologies in soft robotics, liquid metals have emerged as a focus in this field due to their unique properties, including low melting point, high electrical conductivity, superior thermal conductivity, and excellent fluidity. Liquid metals(such as gallium-based alloys) have significantly enhanced their auxiliary application potential in actuation systems through approaches like magnetic reinforcement, electroactive enhancement, and structural optimization. As conductive materials and flexible electrodes, they demonstrate great potential in actuation, sensing, and multi-degree-of-freedom(multi-DOF) motion. This review systematically summarized the functional characteristics, actuation mechanisms, and sensing technologies of liquid metals, with particular emphasis on their current applications and challenges in underwater soft robotics. To date, liquid metal-based actuators have achieved diverse actuation modes, including electrothermal, electrochemical, and magnetic driving mechanisms, while sensors have made breakthroughs in high-sensitivity strain detection, pressure sensing, and multimodal signal monitoring. Nevertheless, the realization of multi-DOF motion in underwater environments still faces technical challenges, such as complex actuation mechanisms, insufficient material stability, and imperfect control systems. Future research needs to further overcome these technical bottlenecks to advance the practical application of liquid metal-driven underwater soft robots.
-
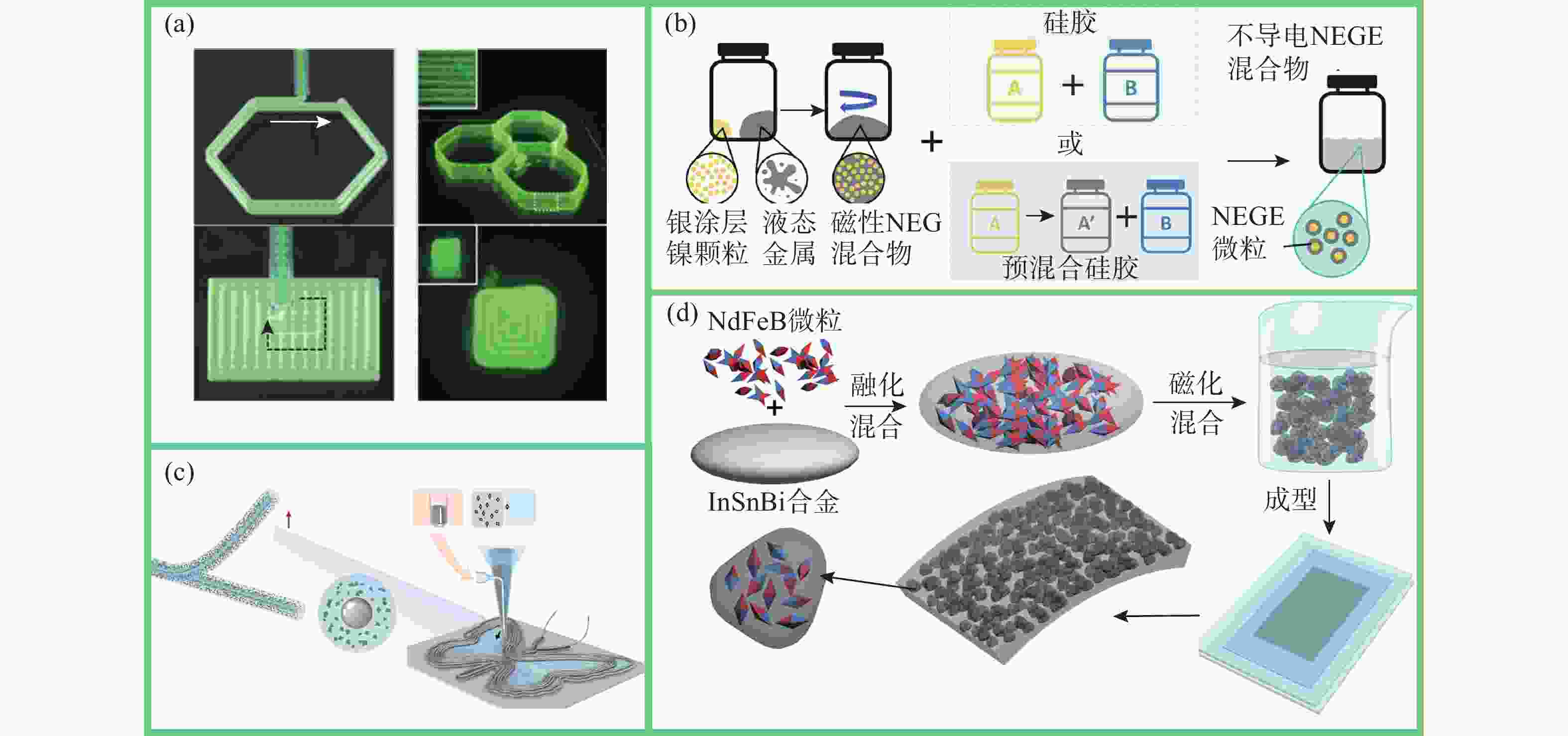
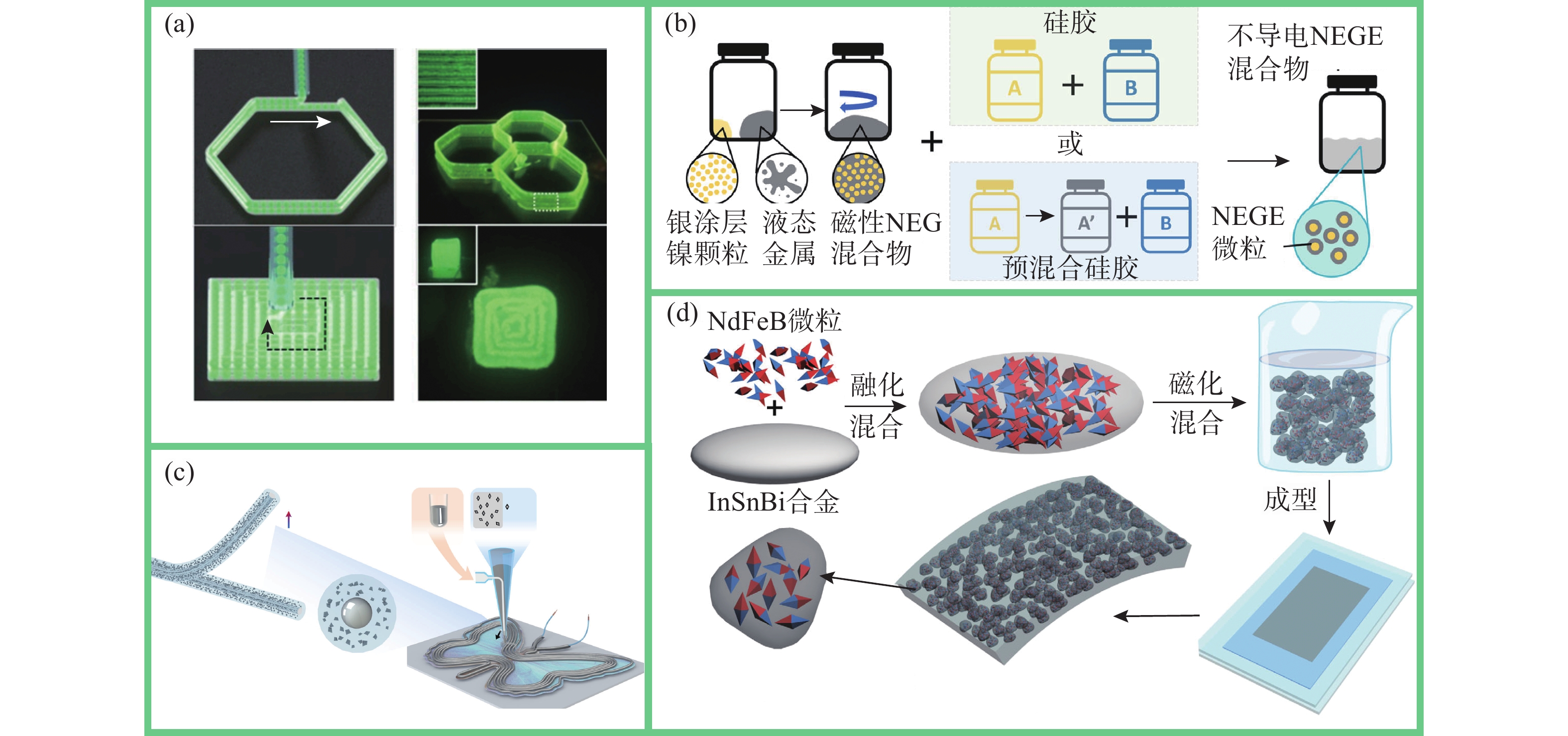
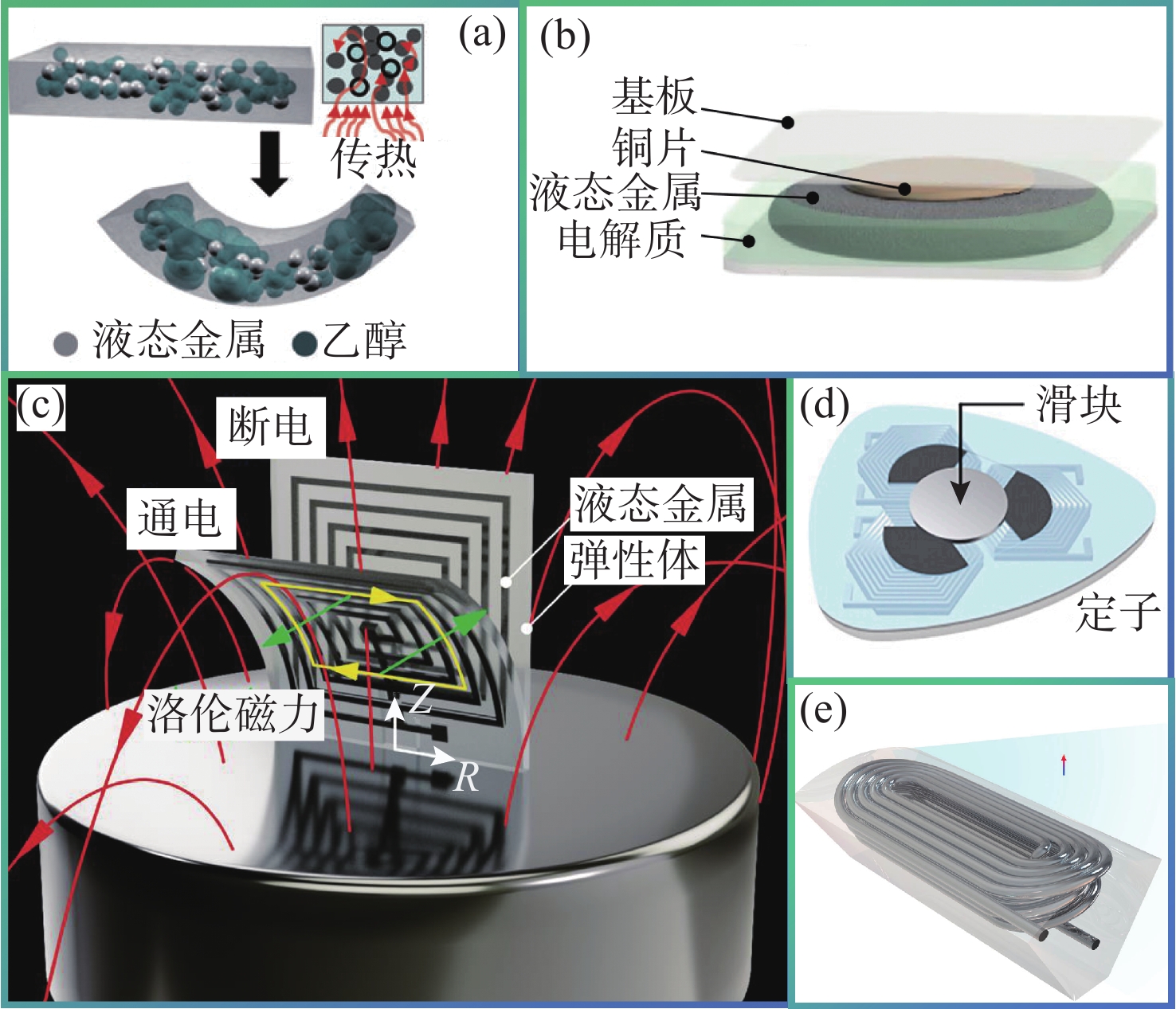
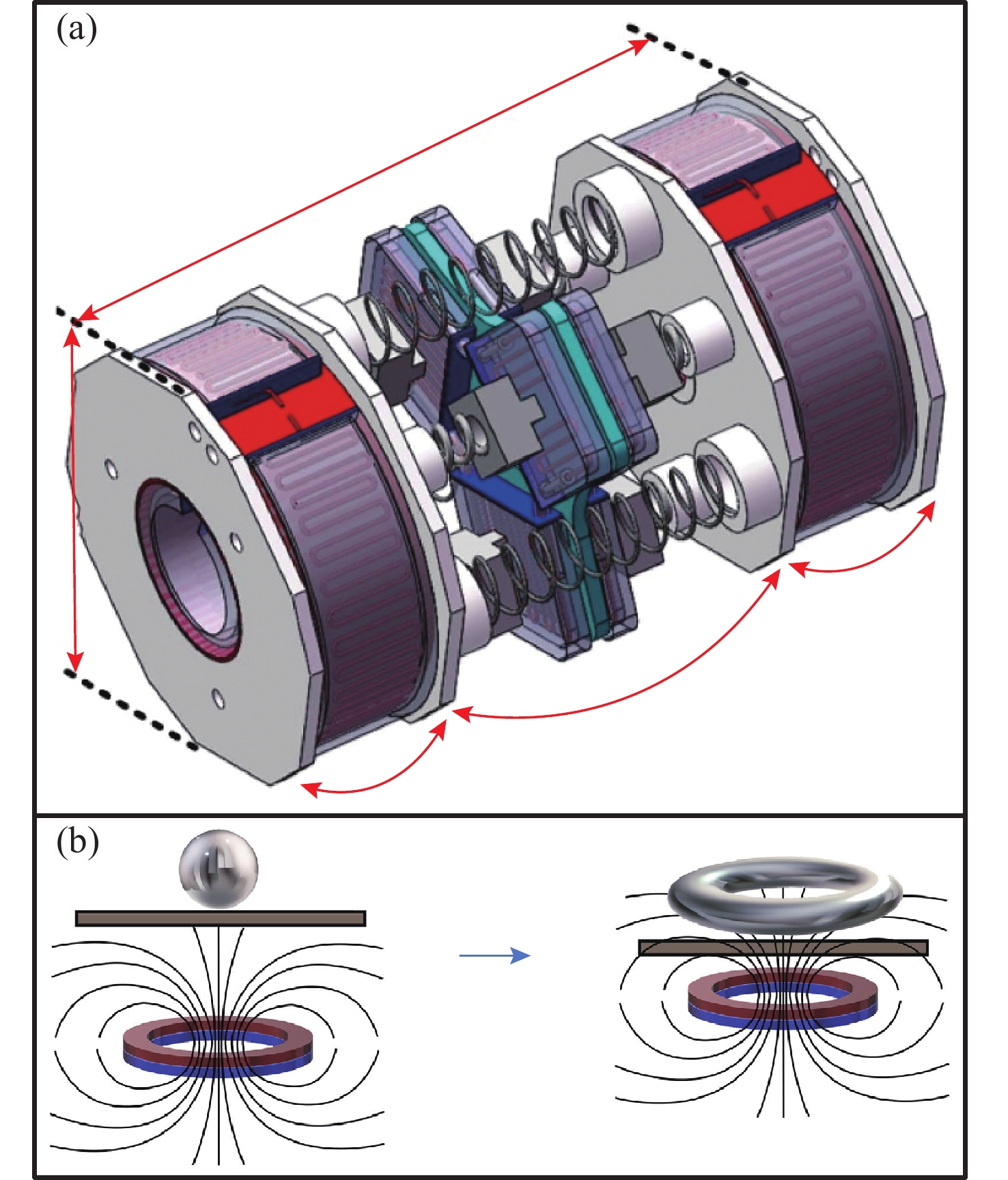
图 2 基于磁性增强的液态金属的改性方法
Figure 2. Modification methods for liquid metals based on magnetic enhancement
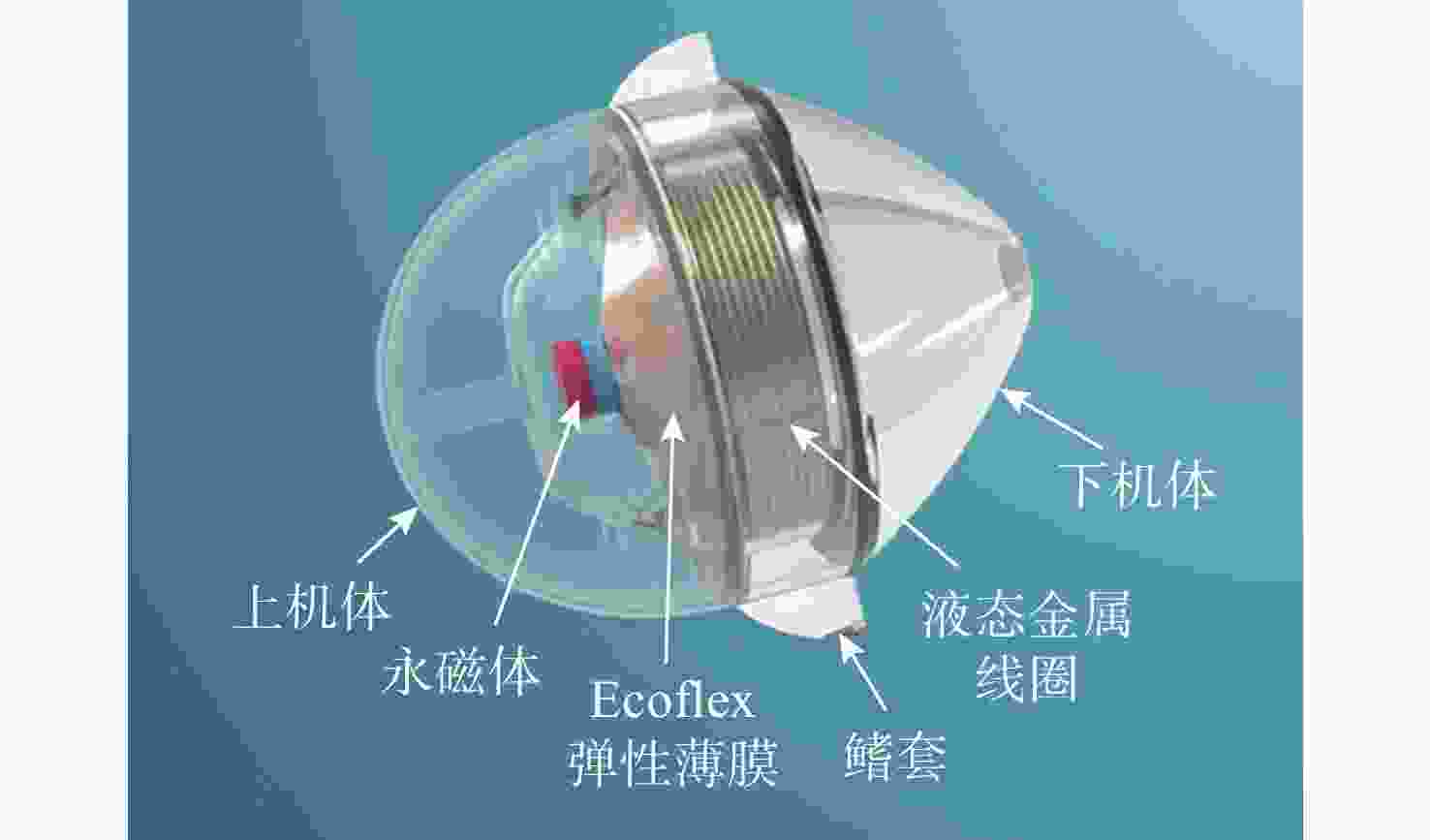
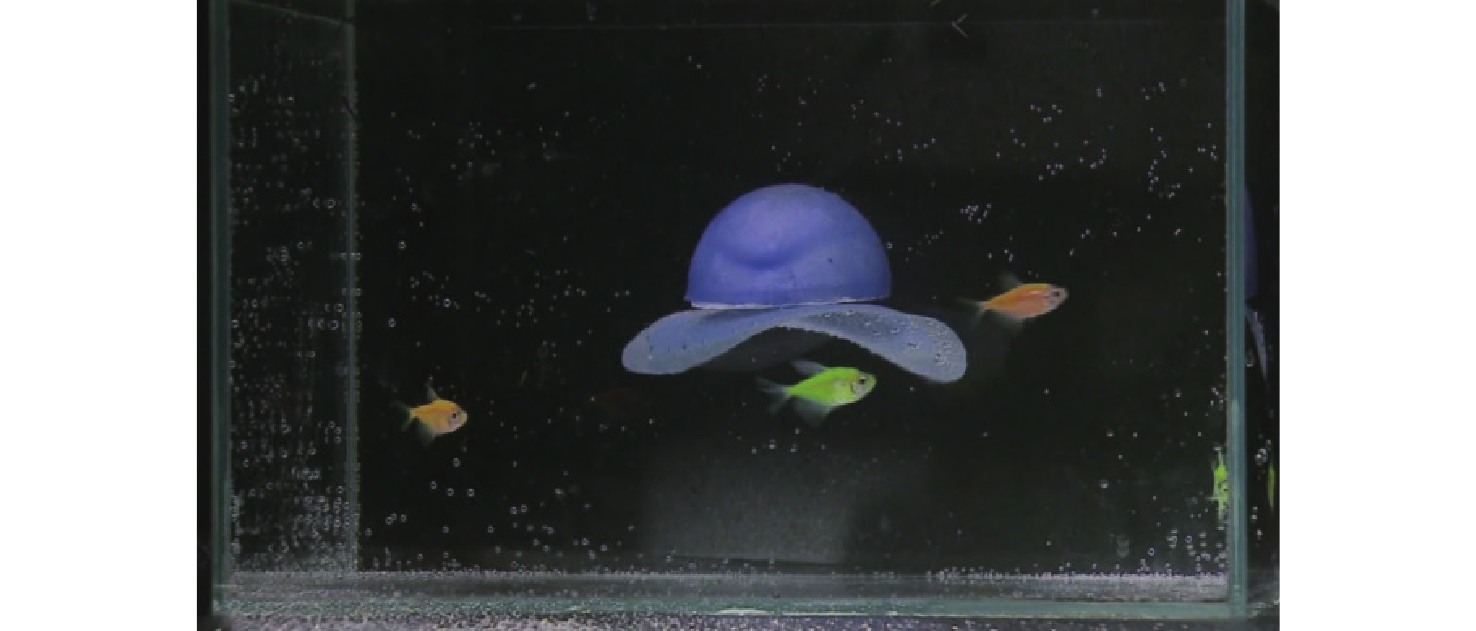
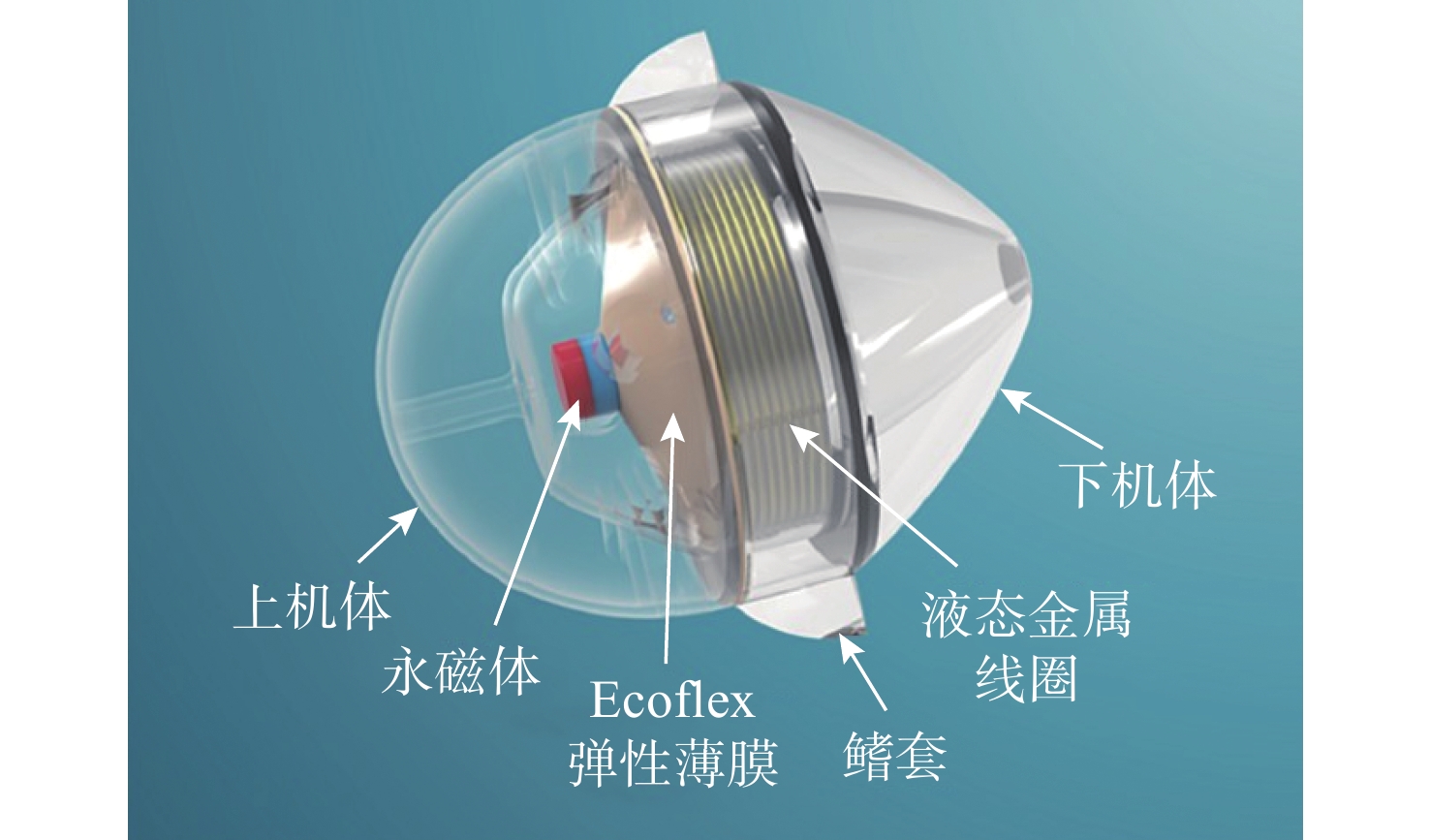
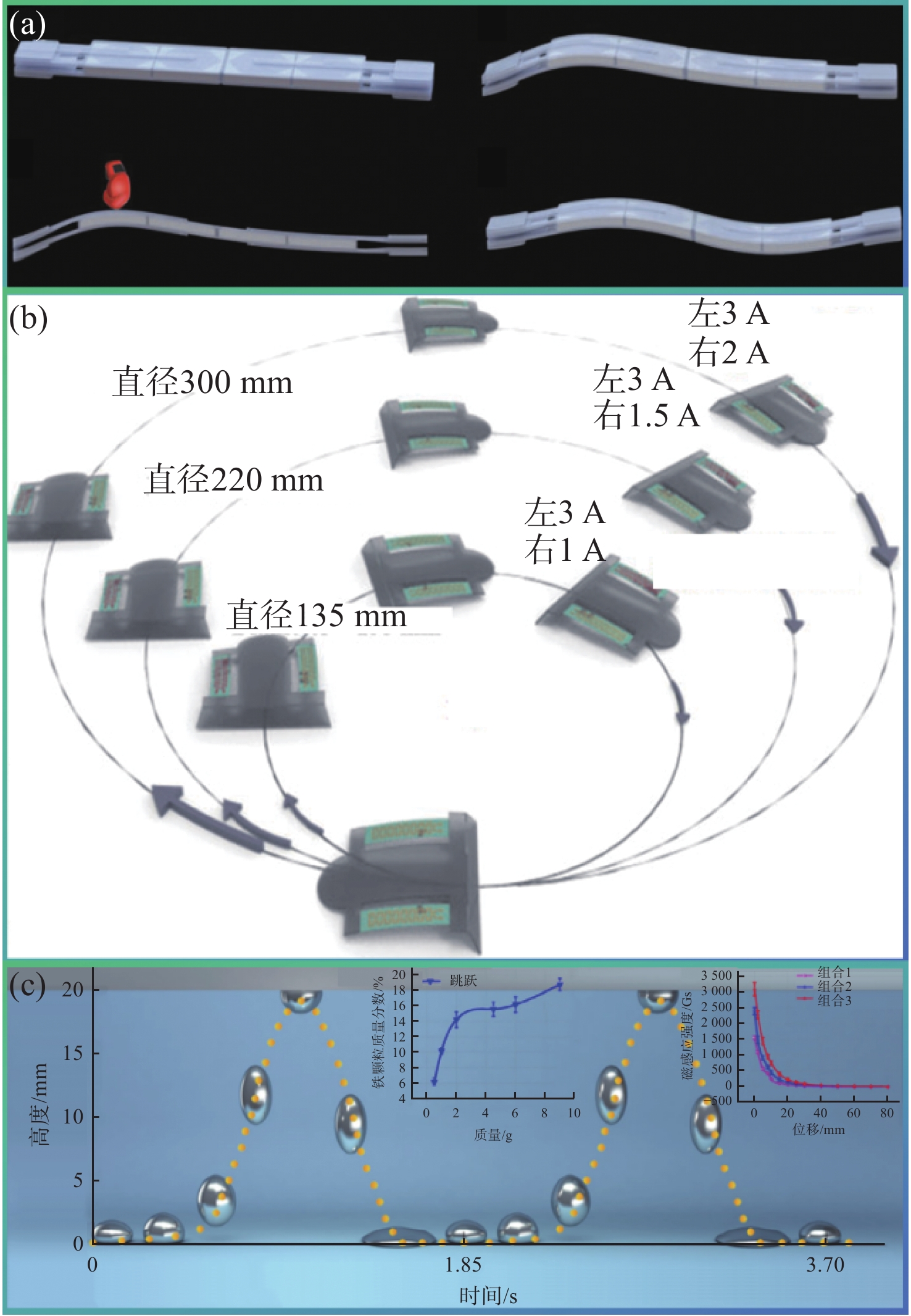
图 6 软电磁驱动仿乌贼喷射推进机器鱼
Figure 6. Soft electromagnetic actuator-based squid-inspired jet-propelled robotic fish
表 1 常见液态金属的物理性能
Table 1. Physical properties of common liquid metals
液态金属 熔点
/°C粘度
/(mPa·s)电导率
/(MS/m)热导率
/(W·m−1·°C−1)汞Hg[16] −38.8 1.55 1.04 8.34 镓Ga[17] 29.8 1.37 6.73 29.30 铷Rb 39.3 0.48 1.10 35.90 铯Cs 28.4 0.35 1.20 35.90 钫Fr 27.0 0.30 0.03 0.15 铟In[18] 156.6 12.50 81.60 锡Sn[18] 231.9 8.70 66.60 铋Bi[18] 271.4 0.90 7.87 GaIn21.4 (EGaIn)[6] 15.6 1.99 3.40 26.43 GaSn13.4[7] 21.0 GaAl0.9[7] 25.9 Ga68.5In21.5Sn10 (Galinstan)[19] 10.5 1.50 3.50 25.41  下载: 导出CSV
下载: 导出CSV
表 2 液态金属驱动技术的水下适用性对比
Table 2. Underwater applicability comparison of liquid metal actuation technologies
驱动机制 原理 水下优势 水下局限性 传感协同价值 磁场控制 外磁场操控磁性液态金属液滴 无接触控制、穿透性强 需预混铁颗粒、负载能力弱(<100 mg) 磁定位、运动轨迹反馈 电场驱动 电化学调控表面张力 电压低(0.5 V)、应变大(87%) 需电解质环境、电极腐蚀 阻抗监测流体化学特性 光驱动 光热/光化学相变 无线能量传输、非接触 水下光衰减严重、响应慢 集成光学传感器实现闭环控制 超声波 声空化/声辐射力 穿透浑浊水体、无惧光学干扰 能量转化效率低(<5%) 声呐避障与通信集成
下载: 导出CSV
-
[1] SONG M, DANIELS K E, KIANI A, et al. Interfacial tension modulation of liquid metal via electrochemical oxidation[J]. Advanced Intelligent Systems, 2021, 3(8): 2100024. doi: 10.1002/aisy.202100024 [2] WANG X, LIU J. Recent advancements in liquid metal flexible printed electronics: Properties, technologies, and applications[J]. Micromachines, 2016, 7(12): 206. doi: 10.3390/mi7120206 [3] DICKEY M D. Stretchable and soft electronics using liquid metals[J]. Advanced Materials, 2017, 29(27): 1606425. doi: 10.1002/adma.201606425 [4] CLARKSON T W, MAGOS L. The toxicology of mercury and its chemical compounds[J]. Crit Rev Toxicol, 2006, 36(8): 609-662. doi: 10.1080/10408440600845619 [5] LU Y, HU Q, LIN Y, et al. Transformable liquid-metal nanomedicine[J]. Nature Communications, 2015, 6(1): 10066. doi: 10.1038/ncomms10066 [6] ZHAO Z, SONI S, LEE T, et al. Smart eutectic Gallium-Indium: from properties to applications[J]. Adv Mater, 2023, 35(1): e2203391. doi: 10.1002/adma.202203391 [7] DAENEKE T, KHOSHMANESH K, MAHMOOD N, et al. Liquid metals: Fundamentals and applications in chemistry[J]. Chem Soc Rev, 2018, 47(11): 4073-111. doi: 10.1039/C7CS00043J [8] YAO Y Y, LIU J. Liquid metal wheeled small vehicle for cargo delivery[J]. RSC Advances, 2016, 6(61): 56482-88. doi: 10.1039/C6RA10629C [9] SONAR H A, GERRATT A P, LACOUR S P, et al. Closed-loop haptic feedback control using a self-sensing soft pneumatic actuator skin[J]. Soft Robot, 2020, 7(1): 22-29. doi: 10.1089/soro.2019.0013 [10] YE J, YAO Y C, GAO J Y, et al. LM-Jelly: Liquid metal enabled biomimetic robotic jellyfish[J]. Soft Robot, 2022, 9(6): 1098-107. doi: 10.1089/soro.2021.0055 [11] 张兵建, 杜荣华, 李汶柏, 等. 基于软电磁驱动的仿乌贼喷射推进机器鱼[J]. 中国科学: 物理学 力学 天文学, 2024, 54(6): 136-150.ZHANG B J, DU R H, LI W B, et al. Squid jet-propelled robotic fish based on soft electromagnetic drive[J]. Sci Sin-Phys Mech Astron, 2024, 54: 136-150. [12] CLARKSON T W. The toxicology of mercury[J]. Crit Rev Clin Lab Sci, 1997, 34(4): 369-403. doi: 10.3109/10408369708998098 [13] JACOB A R, PAREKH D P, DICKEY M D, et al. Interfacial Rheology of Gallium-based liquid metals[J]. Langmuir, 2019, 35(36): 11774-83. doi: 10.1021/acs.langmuir.9b01821 [14] MORLEY N B, BURRIS J, CADWALLADER L C, et al. GaInSn usage in the research laboratory[J]. Review of Scientific Instruments, 2008, 79(5): 056107. doi: 10.1063/1.2930813 [15] PATEL G M, PATEL G C, PATEL R B, et al. Nanorobot: A versatile tool in nanomedicine[J]. J Drug Target, 2006, 14(2): 63-67. doi: 10.1080/10611860600612862 [16] 郑再阳, 孙会彬, 黄维. 液态金属基可拉伸导电复合材料[J]. 化学进展, 2025, 37(3): 295-316.ZHENG Z Y, SUN H B, HUANG W. Liquid metal-based stretchable conductive composites[J]. Progress in Chemistry, 2025, 37(3): 295-316. [17] YU D, XUE Z, MU T. Eutectics: formation, properties, and applications[J]. Chem Soc Rev, 2021, 50(15): 8596-638. doi: 10.1039/D1CS00404B [18] ZURAIQI K, ZAVABETI A, ALLIOUX F M, et al. Liquid metals in catalysis for energy applications[J]. Joule, 2020, 4(11): 2290-321. doi: 10.1016/j.joule.2020.10.012 [19] YU S, KAVIANY M. Electrical, thermal, and species transport properties of liquid eutectic Ga-In and Ga-In-Sn from first principles[J]. J Chem Phys, 2014, 140(6): 064303. doi: 10.1063/1.4865105 [20] CHIECHI R C, WEISS E A, DICKEY M D, et al. Eutectic gallium-indium(EGaIn): A moldable liquid metal for electrical characterization of self-assembled monolayers[J]. Angew Chem Int Ed Engl, 2008, 47(1): 142-144. doi: 10.1002/anie.200703642 [21] KRAUS G G G, GAERTNER M. Galinstan als quecksilberfreie füllflüssigkeit für thermometer und andere messinstrumente, DE19537016A1[P]. 1996-04-11. [22] MÖLLENCAMP H, HUNTEMANN H, JANSEN W. Oszillationserscheinungen an einer bei raumtemperatur flüssigen Galliumlegierung[J]. Monatshefte für Chemie/ Chemical Monthly, 1999, 130(6): 741-751. [23] FALKOVICH G, XU H, PUMIR A, et al. On Lagrangian single-particle statistics[J]. Physics of Fluids, 2012, 24(5): 055102. doi: 10.1063/1.4711397 [24] CUTINHO J, CHANG B S, OYOLA-REYNOSO S, et al. Autonomous thermal-oxidative composition inversion and texture tuning of liquid metal surfaces[J]. ACS Nano, 2018, 12(5): 4744-53. doi: 10.1021/acsnano.8b01438 [25] VILAN A, CAHEN D. Chemical modification of semiconductor surfaces for molecular electronics[J]. Chemical Reviews, 2017, 117(5): 4624-66. doi: 10.1021/acs.chemrev.6b00746 [26] ZHANG X, HAN X, SU J, et al. Well vertically aligned ZnO nanowire arrays with an ultra-fast recovery time for UV photodetector[J]. Applied Physics A, 2012, 107(2): 255-260. doi: 10.1007/s00339-012-6886-6 [27] ANDERSON T J, ANSARA I. The Ga-In(Gallium-Indium) system[J]. Journal of Phase Equilibria, 1991, 12(1): 64-72. doi: 10.1007/BF02663677 [28] RUS D, TOLLEY M T. Design, fabrication and control of soft robots[J]. Nature, 2015, 521(7553): 467-475. doi: 10.1038/nature14543 [29] MEA H J, DELGADILLO L, WAN J. On-demand modulation of 3D-printed elastomers using programmable droplet inclusions[J]. Proc Natl Acad Sci U S A, 2020, 117(26): 14790-97. doi: 10.1073/pnas.1917289117 [30] HOANG T T, PHAN P T, THAI M T, et al. Magnetically engineered conductivity of soft liquid metal composites for robotic, wearable electronic, and medical applications[J]. Advanced Intelligent Systems, 2022, 4(12): 253198001. [31] ZHANG Y, PAN C, LIU P, et al. Coaxially printed magnetic mechanical electrical hybrid structures with actuation and sensing functionalities[J]. Nat Commun, 2023, 14(1): 4428. doi: 10.1038/s41467-023-40109-z [32] CHEN G, MA B, ZHANG J, et al. Reprogrammable magnetic soft robots based on low melting alloys[J]. Advanced Intelligent Systems, 2023, 5(10): 260053280. [33] ARNOLD A, SU J, SABOLSKY E M. Nafion-Pt IPMC electroactive behavior changes in response to environmental nonequilibrium conditions[J]. Smart Materials and Structures, 2023, 32(5): 055014. doi: 10.1088/1361-665X/acc437 [34] YU R, HAN J, CHI Y, et al. Impact of minor alloy components on the electrocapillarity and electrochemistry of liquid metal fractals[J]. Advanced Functional Materials, 2023, 34(31): 2301348. [35] TIMOSINA V, COLE T, LU H D, et al. A non-newtonian liquid metal enabled enhanced electrography[J]. Biosens Bioelectron, 2023, 235: 258824979. [36] KIM M, PARK J J, CHO C, et al. Liquid metal based stretchable room temperature soldering sticker patch for stretchable electronics integration[J]. Advanced Functional Materials, 2023, 33(36): 2370214. doi: 10.1002/adfm.202370214 [37] LU H, ZHANG Q, HUANG X, et al. A reconfigurable and automatic platform for the on-demand production of stretchable conductive composites[J]. Smart Materials and Structures, 2023, 32(4): 045018. doi: 10.1088/1361-665X/acc221 [38] ZHANG J, YAO Y, LIU J. Autonomous convergence and divergence of the self-powered soft liquid metal vehicles[J]. Science Bulletin, 2015, 60(10): 943-951. doi: 10.1007/s11434-015-0786-z [39] WANG Y, DUAN W, ZHOU C, et al. Phoretic liquid metal micro/nanomotors as intelligent filler for targeted microwelding[J]. Advanced Materials, 2019, 31(51): 1905067. doi: 10.1002/adma.201905067 [40] HANDSCHUH-WANG S, RAUF M, GAN T, et al. On the interaction of surfactants with gallium-based liquid metals[J]. Chemistry Select, 2021, 6(39): 10625-36. [41] ZHANG J, YAO Y, SHENG L, et al. Self-fueled biomimetic liquid metal mollusk[J]. Advanced Materials, 2015, 27(16): 2648-55. doi: 10.1002/adma.201405438 [42] BROOKS A M, TASINKEVYCH M, SABRINA S, et al. Shape-directed rotation of homogeneous micromotors via catalytic self-electrophoresis[J]. Nature Communications, 2019, 10(1): 495. doi: 10.1038/s41467-019-08423-7 [43] XING Y, ZHOU M, XU T, et al. Core@Satellite Janus nanomotors with pH-responsive multi-phoretic propulsion[J]. Angewandte Chemie International Edition, 2020, 59(34): 14368-72. doi: 10.1002/anie.202006421 [44] YANG Q, XU L, ZHONG W, et al. Recent advances in motion control of micro/nanomotors[J]. Advanced Intelligent Systems, 2020, 2(8): 2000049. doi: 10.1002/aisy.202000049 [45] ZAVABETI A, DAENEKE T, CHRIMES A F, et al. Ionic imbalance induced self-propulsion of liquid metals[J]. Nature Communications, 2016, 7(1): 12402. doi: 10.1038/ncomms12402 [46] NOURHANI A, LAMMERT P E. Geometrical performance of self-phoretic colloids and microswimmers[J]. Physical Review Letters, 2016, 116(17): 178302. doi: 10.1103/PhysRevLett.116.178302 [47] HANDSCHUH-WANG S, GAN T, WANG T, et al. Surface tension of the oxide skin of gallium-based liquid metals[J]. Langmuir, 2021, 37(30): 9017-25. doi: 10.1021/acs.langmuir.1c00966 [48] XU D, HU J, PAN X, et al. Enzyme-powered liquid metal nanobots endowed with multiple biomedical functions[J]. ACS Nano, 2021, 15(7): 11543-54. doi: 10.1021/acsnano.1c01573 [49] HU L, WANG L, DING Y, et al. Manipulation of liquid metals on a graphite surface[J]. Advanced Materials, 2016, 28(41): 9210-17. doi: 10.1002/adma.201601639 [50] CHEN Y, CHEN X, ZHU Z, et al. 3D actuation of foam-core liquid metal droplets[J]. Soft Matter, 2023, 19(7): 1293-99. doi: 10.1039/D2SM01349E [51] HU L, WANG H, WANG X, et al. Magnetic liquid metals manipulated in the three-dimensional free space[J]. ACS Applied Materials & Interfaces, 2019, 11(8): 8685-92. [52] CHEN R, XIONG Q, SONG R Z, et al. Magnetically controllable liquid metal marbles[J]. Advanced Materials Interfaces, 2019, 6(20): 1901057. doi: 10.1002/admi.201901057 [53] LIU M, WANG Y, KUAI Y, et al. Magnetically powered shape-transformable liquid metal micromotors[J]. Small, 2019, 15(52): 1905446. doi: 10.1002/smll.201905446 [54] ZHANG J, GUO R, LIU J. Self-propelled liquid metal motors steered by a magnetic or electrical field for drug delivery[J]. J Mater Chem B, 2016, 4(32): 5349-57. doi: 10.1039/C6TB00996D [55] HANDSCHUH-WANG S, CHEN Y, ZHU L, et al. Electric actuation of liquid metal droplets in acidified aqueous electrolyte[J]. Langmuir, 2019, 35(2): 372-381. doi: 10.1021/acs.langmuir.8b03384 [56] LI G, DU J, ZHANG A, et al. Electrochemically controllable actuation of liquid metal droplets based on Marangoni effect[J]. Journal of Applied Physics, 2019, 126(8): 084505. doi: 10.1063/1.5109082 [57] XUE R, LIU W, JIANG T, et al. Pumping of ionic liquids by liquid metal-enabled electrocapillary flow under DC-biased AC forcing[J]. Advanced Materials Interfaces, 2020, 7(14): 2000345. doi: 10.1002/admi.202000345 [58] COLE T, TANG S Y. Liquid metals as soft electromechanical actuators[J]. Materials Advances, 2022, 3(1): 173-185. doi: 10.1039/D1MA00885D [59] LI F, KUANG S, LI X, et al. Magnetically- and electrically-controllable functional liquid metal droplets[J]. Advanced Materials Technologies, 2019, 4(3): 1800694. doi: 10.1002/admt.201800694 [60] XIE J, LI F, KUANG S, et al. Modeling and motion control of a liquid metal droplet in a fluidic channel[J]. IEEE/ASME Transactions on Mechatronics, 2020, 25(2): 942-950. doi: 10.1109/TMECH.2020.2964387 [61] WANG D, LIN Z, ZHOU C, et al. Liquid metal gallium micromachines speed up in confining channels[J]. Advanced Intelligent Systems, 2019, 1(7): 1900064. doi: 10.1002/aisy.201900064 [62] TANG S Y, KHOSHMANESH K, SIVAN V, et al. Liquid metal enabled pump[J]. Proceedings of the National Academy of Sciences, 2014, 111(9): 3304-09. doi: 10.1073/pnas.1319878111 [63] WANG D, GAO C, WANG W, et al. Shape-transformable, fusible rodlike swimming liquid metal nanomachine[J]. ACS Nano, 2018, 12(10): 10212-20. doi: 10.1021/acsnano.8b05203 [64] LI Z, ZHANG H, WANG D, et al. Reconfigurable assembly of active liquid metal colloidal cluster[J]. Angewandte Chemie International Edition, 2020, 59(45): 19884-88. doi: 10.1002/anie.202007911 [65] GAN T, SHANG W, HANDSCHUH-WANG S, et al. Light-induced shape morphing of liquid metal nanodroplets enabled by polydopamine coating[J]. Small, 2019, 15(9): 1804838. doi: 10.1002/smll.201804838 [66] TANG X, TANG S Y, SIVAN V, et al. Photochemically induced motion of liquid metal marbles[J]. Applied Physics Letters, 2013, 103(17): 174104. doi: 10.1063/1.4826923 [67] XIAO Y, DING Y, LEI J, Et al. Bubble-induced in situ property modulation of liquid metal[J]. Advanced Materials Interfaces, 2021, 8(9): 2002204. doi: 10.1002/admi.202002204 [68] WANG B, KOSTARELOS K, NELSON B J, et al. Trends in micro-/nanorobotics: Materials development, actuation, localization, and system integration for biomedical applications[J]. Advanced Materials, 2021, 33(4): 2002047. doi: 10.1002/adma.202002047 [69] COMBS A W, SHIROMA W A, OHTA A T. Ferrofluidic actuation of liquid metal for radio-frequency applications[J]. Electronics Letters, 2018, 54(3): 151-153. doi: 10.1049/el.2017.4108 [70] OH S, LEE S, BYUN S H, et al. 3D shape-morphing display enabled by electrothermally responsive, stiffness-tunable liquid metal platform with stretchable electroluminescent device[J]. Advanced Functional Materials, 2023, 33(24): 2214766. doi: 10.1002/adfm.202214766 [71] SHU J, GE D A, WANG E, et al. A liquid metal artificial muscle[J]. Adv Mater, 2021, 33(43): e2103062. doi: 10.1002/adma.202103062 [72] MAO G, DRACK M, KARAMI-MOSAMMAM M, et al. Soft electromagnetic actuators[J]. Science Advances, 2020, 6(26): eabc0251. doi: 10.1126/sciadv.abc0251 [73] CHOI Y, SHIN G, YOON S J, et al. Soft electromagnetic sliding actuators for highly compliant planar motions using microfluidic conductive coil array[J]. Soft Robot, 2025, 12(1): 135-144. doi: 10.1089/soro.2024.0007 [74] LI N, ZHOU Y, LI Y, et al. Transformable 3D curved high-density liquid metal coils——an integrated unit for general soft actuation, sensing and communication[J]. Nature Communications, 2024, 15(1): 7679. doi: 10.1038/s41467-024-51648-4 [75] LU H, ZHAO M, ZHANG Q, et al. Liquid metal chameleon tongues: Modulating surface tension and phase transition to enable bioinspired soft actuators[J]. Advanced Intelligent Systems, 2024, 6(10): 2400231. doi: 10.1002/aisy.202400231 [76] ZHAO Z N, LIN J, ZHANG J, et al. Liquid metal enabled flexible electronic system for eye movement tracking[J]. IEEE Sensors Journal, 2018, 18(6): 2592-98. doi: 10.1109/JSEN.2018.2796121 [77] GUO R, WANG X, YU W, et al. A highly conductive and stretchable wearable liquid metal electronic skin for long-term conformable health monitoring[J]. Science China Technological Sciences, 2018, 61(7): 1031-37. doi: 10.1007/s11431-018-9253-9 [78] VARGA M, LADD C, MA S, et al. On-skin liquid metal inertial sensor[J]. Lab on a Chip, 2017, 17(19): 3272-78. doi: 10.1039/C7LC00735C [79] JACKSON N, BUCKLEY J, CLARKE C, et al. Manufacturing methods of stretchable liquid metal-based antenna[J]. Microsystem Technologies, 2019, 25(8): 3175-84. doi: 10.1007/s00542-018-4234-2 [80] CHIOLERIO A, QUADRELLI M B. Smart fluid systems: The advent of autonomous liquid robotics[J]. Advanced Science, 2017, 4(7): 1700036. doi: 10.1002/advs.201700036 [81] JIN C, ZHANG J, LI X, et al. Injectable 3-D fabrication of medical electronics at the target biological tissues[J]. Scientific Reports, 2013, 3(1): 3442. doi: 10.1038/srep03442 [82] NAYAK S, LI Y, TAY W, et al. Liquid-metal-elastomer foam for moldable multi-functional triboelectric energy harvesting and force sensing[J]. Nano Energy, 2019, 64: 103912. doi: 10.1016/j.nanoen.2019.103912 [83] KIM T, KIM D M, LEE B J, et al. Soft and deformable sensors based on liquid metals[J]. Sensors, 2019, 19(19): 4250. doi: 10.3390/s19194250 [84] ZHANG D, ZHANG J, WU Y, et al. Liquid metal interdigitated capacitive strain sensor with normal stress insensitivity[J]. Advanced Intelligent Systems, 2021, 4(4): 2100201. [85] PINTO T, CHEN C, PINGER C, et al. 3D-printed liquid metal-based stretchable conductors and pressure sensors[J]. Smart Materials and Structures, 2021, 30(9): 095005. doi: 10.1088/1361-665X/ac15a1 [86] LUONG T, SEO S, JEON J, et al. Soft artificial muscle with proprioceptive feedback: design, modeling and control[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 4797-804. doi: 10.1109/LRA.2022.3152326 [87] ZHEN R, JIANG L, DING K, et al. Force perception for rigid-soft finger without force sensors: theoretical analysis, and model transfer[J]. IEEE Robotics and Automation Letters, 2024, 9(2): 1867-74. doi: 10.1109/LRA.2023.3347135 [88] JUNG J, LEE E, KIM J, et al. Ultra-thin multi-modal soft sensor using liquid-metal thin-film deposition for enhanced human-robot interaction[J]. IEEE Robotics and Automation Letters, 2024, 9(6): 5269-75. doi: 10.1109/LRA.2024.3389349 [89] CHOI H, KIM Y, KIM S, et al. Adhesive bioelectronics for sutureless epicardial interfacing[J]. Nature Electronics, 2023, 6(10): 779-789. doi: 10.1038/s41928-023-01023-w [90] SOOMRO A M, KHALID M A U, SHAH I, et al. Highly stable soft strain sensor based on Gly-KCl filled sinusoidal fluidic channel for wearable and water-proof robotic applications[J]. Smart Materials and Structures, 2020, 29(2): 025011. doi: 10.1088/1361-665X/ab540b [91] KOHLS N D, BALAK R, RUDDY B P, et al. Soft electromagnetic motor and soft magnetic sensors for synchronous rotary motion[J]. Soft Robot, 2023, 10(5): 912-922. doi: 10.1089/soro.2022.0075 [92] LIU T, SEN P, KIM C J. Characterization of nontoxic liquid-metal alloy galinstan for applications in microdevices[J]. Journal of Microelectromechanical Systems, 2012, 21(2): 443-450. doi: 10.1109/JMEMS.2011.2174421 [93] TANG S Y, SIVAN V, PETERSEN P, et al. Liquid metal actuator for inducing chaotic advection[J]. Advanced Functional Materials, 2014, 24(37): 5851-58. doi: 10.1002/adfm.201400689 [94] MA J L, DONG H X, HE Z Z. Electrochemically enabled manipulation of gallium-based liquid metals within porous copper[J]. Materials Horizons, 2018, 5(4): 675-682. doi: 10.1039/C8MH00203G [95] WANG E, SHU J, JIN H, et al. Liquid metal motor[J]. iScience, 2021, 24(1): 101911. doi: 10.1016/j.isci.2020.101911 [96] CHEN S, WANG H Z, ZHAO R Q, et al. Liquid metal composites[J]. Matter, 2020, 2(6): 1446-80. doi: 10.1016/j.matt.2020.03.016 [97] LI J, CHEN S, SUN M. Design and fabrication of a crawling robot based on a soft actuator[J]. Smart Materials and Structures, 2021, 30(12): 125018. doi: 10.1088/1361-665X/ac2e1b [98] WANG B, ZHANG B, TAN Y, et al. Leech-inspired shape-encodable liquid metal robots for reconfigurable circuit welding and transient electronics[J]. Advanced Intelligent Systems, 2022, 4(9): 2200080. doi: 10.1002/aisy.202200080 [99] OH B, PARK Y G, JUNG H, et al. Untethered soft robotics with fully integrated wireless sensing and actuating systems for somatosensory and respiratory functions[J]. Soft Robot, 2020, 7(5): 564-573. doi: 10.1089/soro.2019.0066 [100] BARTKOWSKI P, PAWLISZAK L, CHEVALE S G, et al. Programmable shape-shifting soft robotic structure using liquid metal electromagnetic actuators[J]. Soft Robot, 2024, 11(5): 802-811. doi: 10.1089/soro.2023.0144 [101] XU L, ZHU C, LAMONT S, et al. Programming motion into materials using electricity-driven liquid crystal elastomer actuators[J]. Soft Robot, 2024, 11(3): 464-472. doi: 10.1089/soro.2023.0063 [102] ZHOU W, LIANG Q, CHEN T. 3D manipulation of magnetic liquid metals[J]. Advanced Intelligent Systems, 2020, 2(10): 1900170. doi: 10.1002/aisy.201900170 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 939
- HTML全文浏览量: 371
- PDF下载量: 118
- 被引次数: 0