Dynamic Interaction between Frogman’s Lower Limb Posture and Flow Field Environment
-
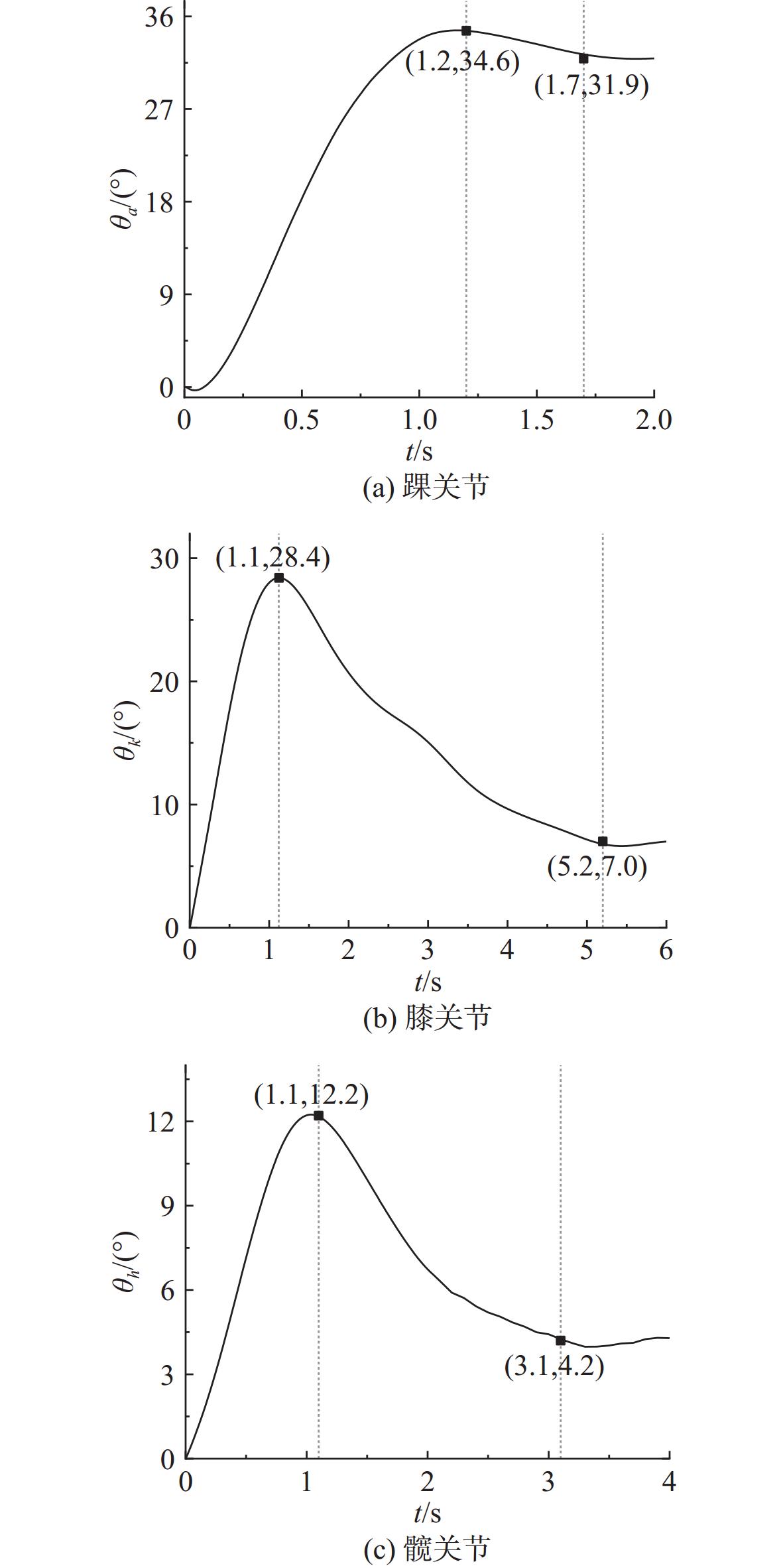
摘要: 针对水下运动中蛙人下肢姿态与流场环境的动态耦合机制问题展开研究。首先, 采用流固耦合仿真方法, 构建穿戴式助力装备的蛙人下肢动力学数值模型, 通过与实验结果进行对比, 验证了数值模型的可靠性; 其次, 基于验证模型分析不同航速下水流冲击对蛙人下肢姿态的影响, 揭示了关节角度变化规律; 最后, 基于NSGA-II多目标优化算法得到不同航速时下肢关节角度的Pareto最优解集, 提出了基于姿态补偿的阻力优化策略, 并通过实验验证了优化效果。研究结果表明: 固定航速下, 下肢姿态经历“最大形变—反向调整—动态平衡”3个阶段, 且随着运动速度提高, 下肢稳定姿态更趋于流场自适应平衡点; 在1~3 kn航速范围内, 髋、膝、踝关节的姿态稳定角度与阻力最优角度之间的补偿量分别为−0.78°、2.28°和−1.05°, 在对下肢姿态优化实验验证中, 航速较自由状态提高9.09%, 说明通过下肢姿态角度约束可以提高水下运动性能, 为水下助力外骨骼关节模块的闭环控制和总体的流场适应性设计提供了量化依据。Abstract: In this paper, the dynamic coupling mechanism between the posture of the lower limbs and the flow field environment in the underwater movement of frogmen was deeply studied. Firstly, by using the fluid-structure coupling simulation method, a numerical model of the frogman’s lower limb dynamics with wearable assistive equipment was constructed, and the reliability of the numerical model was verified by comparing the experimental results with the simulation data. Secondly, based on the validated model, the influence of water flow impact on the posture of the frogman’s lower limbs at different speeds was analyzed, and the rule of joint angles was revealed. Finally, the Pareto optimal solution set of lower limb joint angles at different speeds was obtained based on the NSGA-II multi-objective optimization algorithm, and the drag optimization strategy based on attitude compensation was proposed. The optimization effect was verified through experiments. The results show that at a fixed speed, the lower limb posture experiences three phases: “maximum deformation-reverse adjustment-dynamic equilibrium”. As the speed increases, the stable posture of the lower limb tends to approach the adaptive equilibrium point of the flow field. Within the 1~3 kn speed range, the compensation between the posture stabilization angle and the optimal angle of resistance for the hip, knee, and ankle joints is −0.78°, 2.28°, and −1.05°. In the experimental verification of lower limb posture optimization, the speed is increased by 9.09% compared with the free state. It is demonstrated that by constraining the posture angles of the lower limbs, the underwater movement performance can be improved. This provides a quantitative basis for the closed-loop control of the joint module of the underwater assisted exoskeleton and the overall design of the flow field adaptation.
-
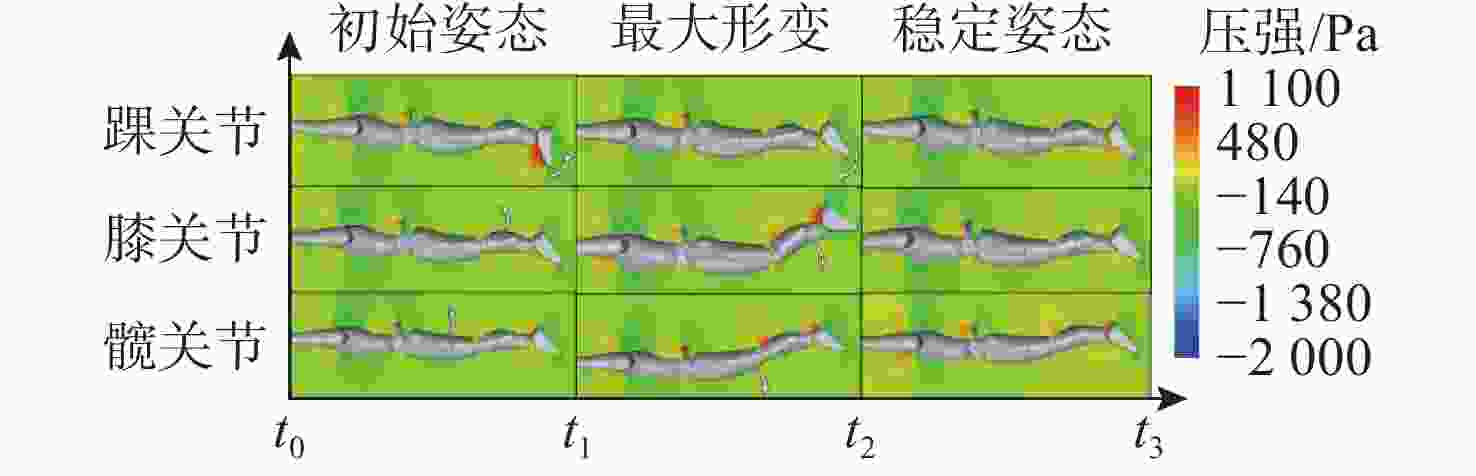
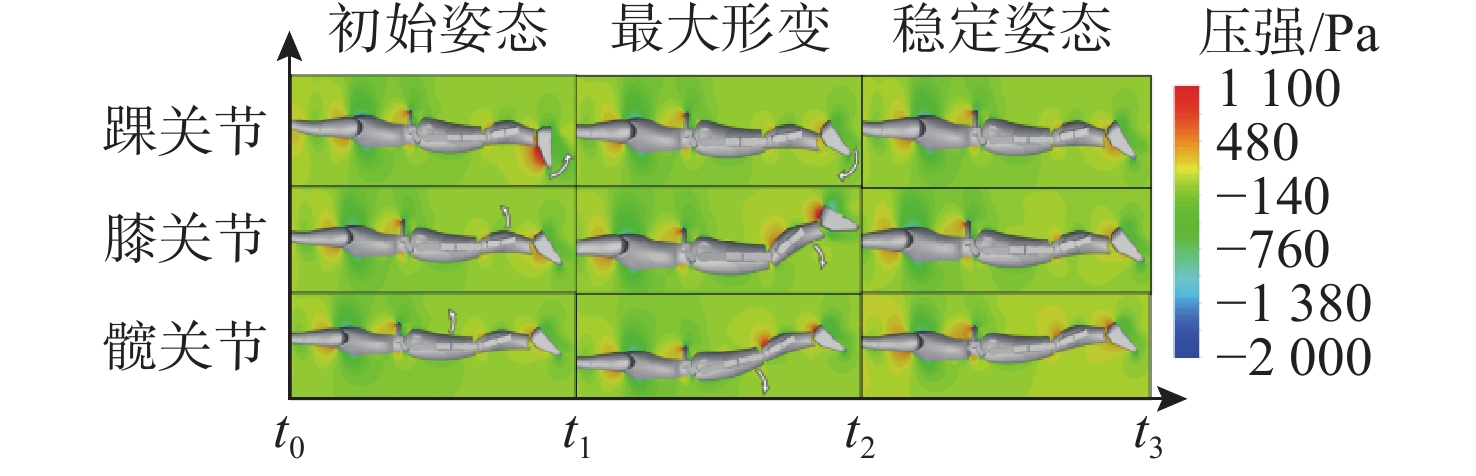
图 5 航速为3 kn时蛙人周围流场压强
Figure 5. Pressure distribution of the flow field around the frogman at a speed of 3 kn
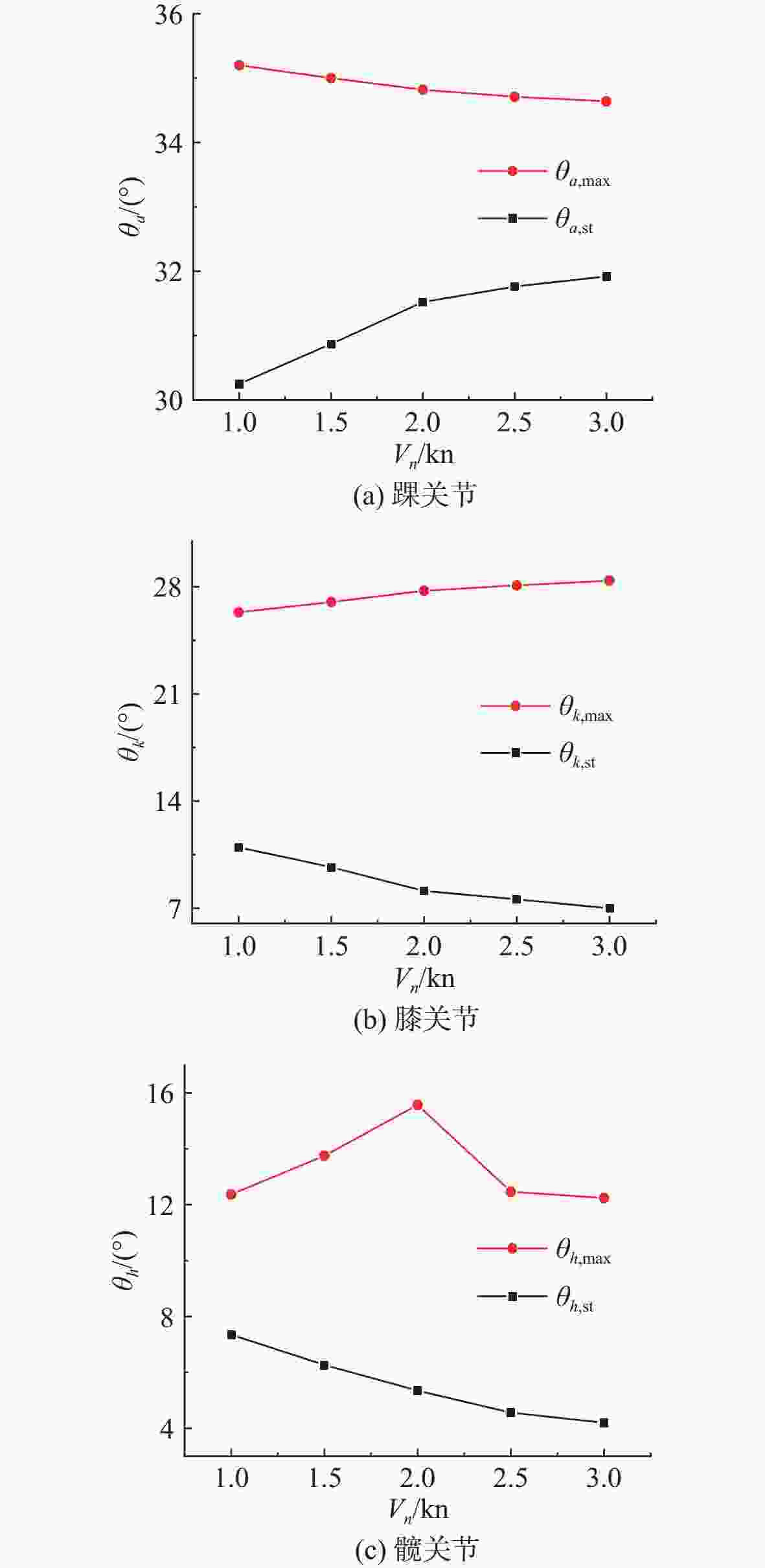
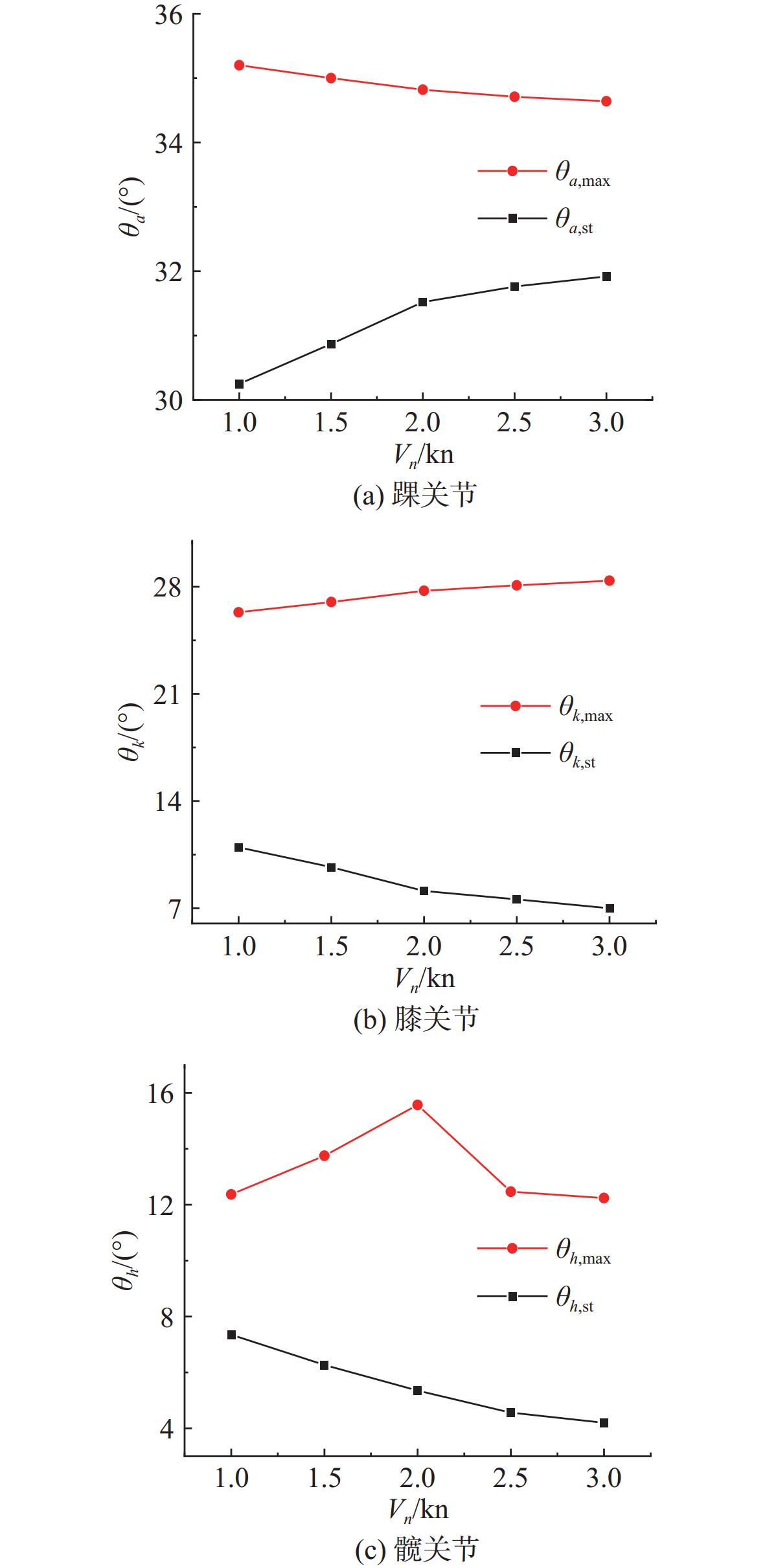
图 7 不同航速下关节最大角度和稳定角度
Figure 7. Maximum angles and stable angles of joints at different speeds
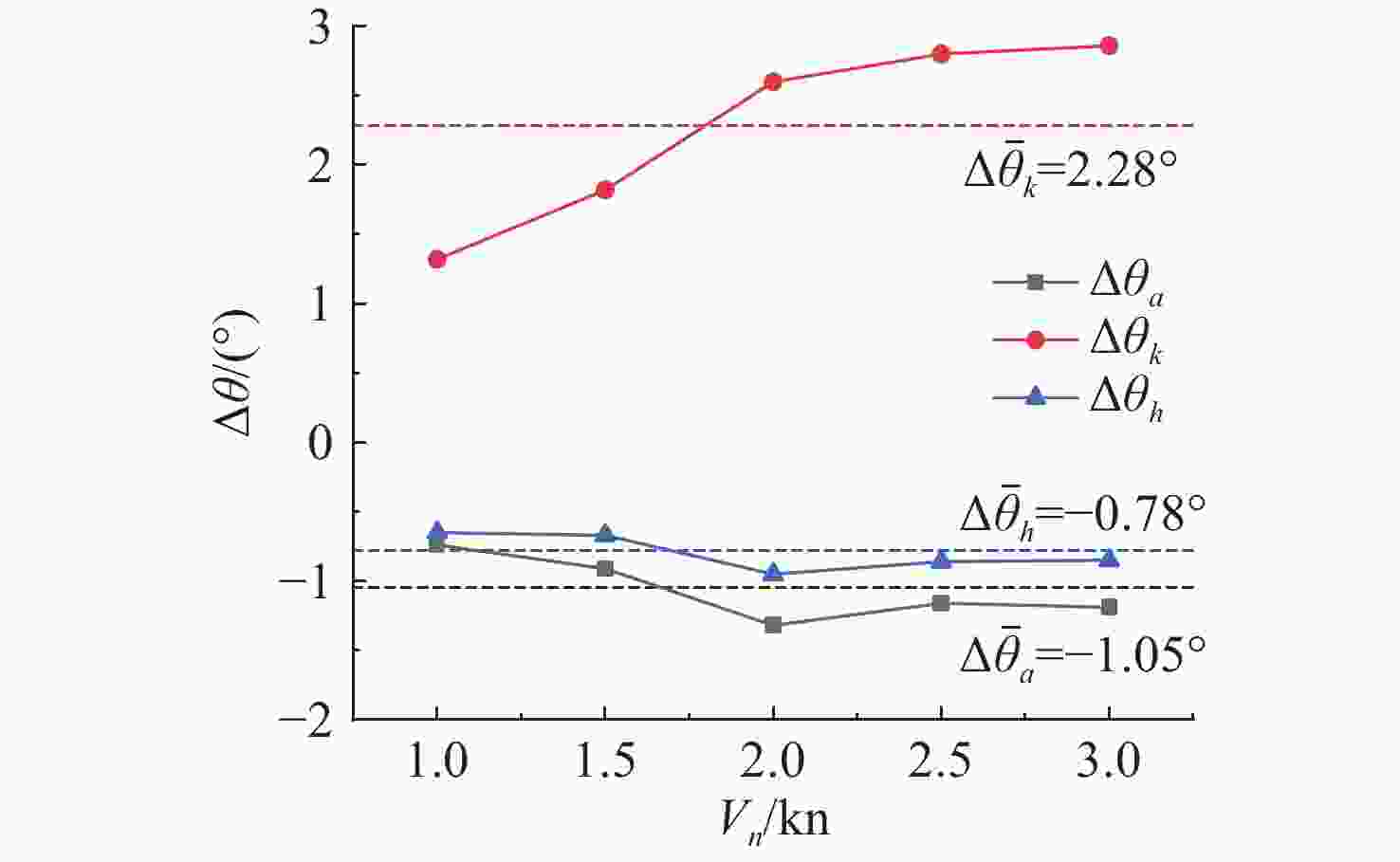
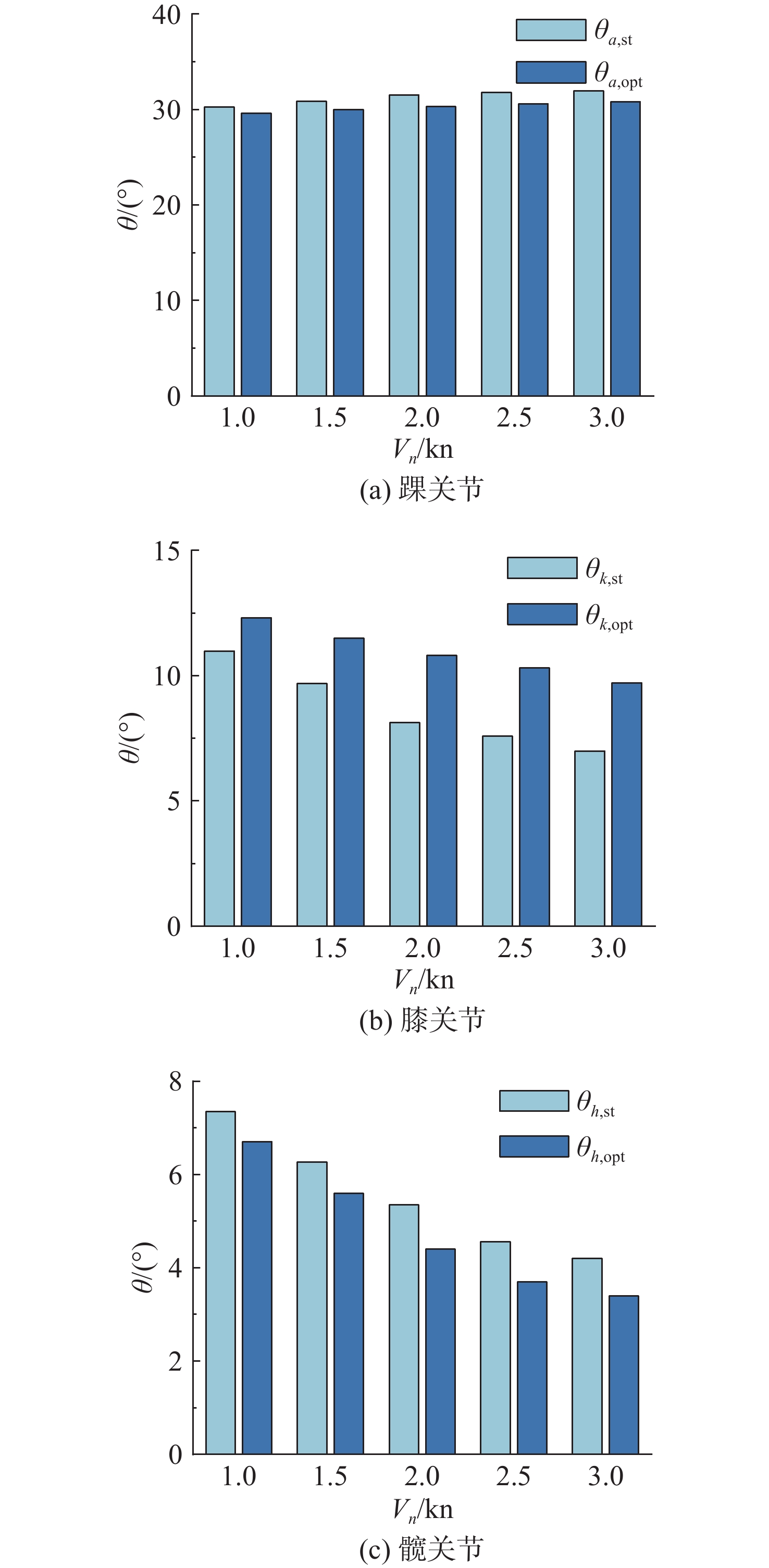
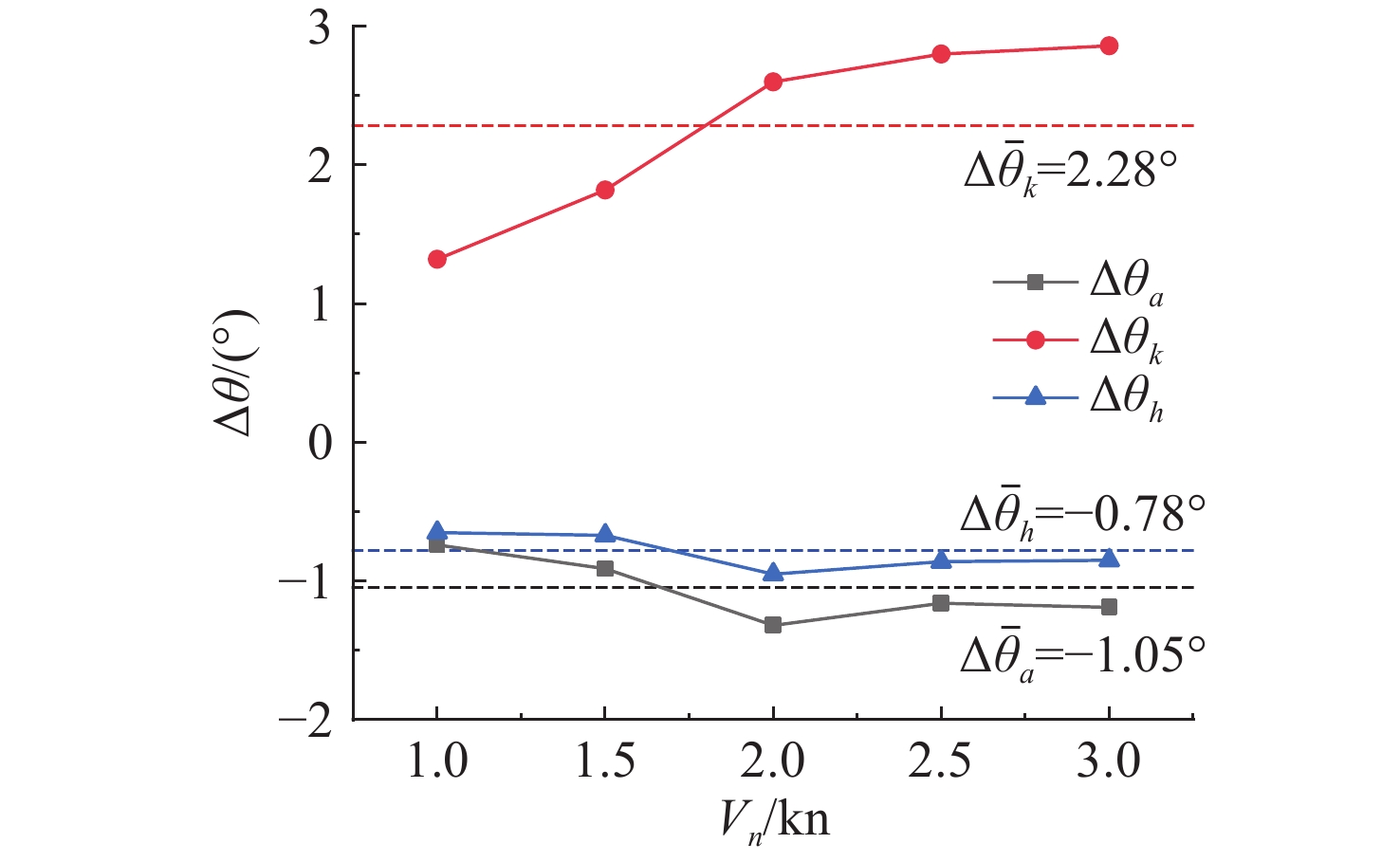
图 10 下肢关节姿态补偿角度随航速变化曲线
Figure 10. Variation curves of lower limb joint posture compensation angles with speed
表 1 网格无关性验证
Table 1. Grid independence verification
网格方案 网格数量 阻力系数 变化率 Cas-1 1.81×106 0.448 Cas-2 3.00×106 0.471 4.88% Cas-3 4.83×106 0.470 0.21%  下载: 导出CSV
下载: 导出CSV
表 2 下肢关节角度动态响应分级模型回归参数
Table 2. Regression parameters of the graded model for dynamic response of lower limb joint angles
回归参数 踝关节 膝关节 髋关节 最大屈曲角度响应系数 −0.357 1.316 −2.326 稳定屈曲角度响应系数 1.0842 −2.546 −2.01 最大屈曲角度初始值 35.215 26.25 14.44 稳定屈曲角度初始值 30.225 11.11 7.4703
下载: 导出CSV
表 3 关节角度拟合优度系数(R2)
Table 3. Goodness-of-fit coefficient of joint angles (R2)
$ {\theta }_{a,\mathrm{m}\mathrm{a}\mathrm{x}} $ $ {\theta }_{a,\mathrm{s}\mathrm{t}} $ $ {\theta }_{k,\mathrm{m}\mathrm{a}\mathrm{x}} $ $ {\theta }_{k,\mathrm{s}\mathrm{t}} $ $ {\theta }_{h,\mathrm{m}\mathrm{a}\mathrm{x}} $ $ {\theta }_{h,\mathrm{s}\mathrm{t}} $ 0.996 0.982 0.993 0.987 0.954 0.996
下载: 导出CSV
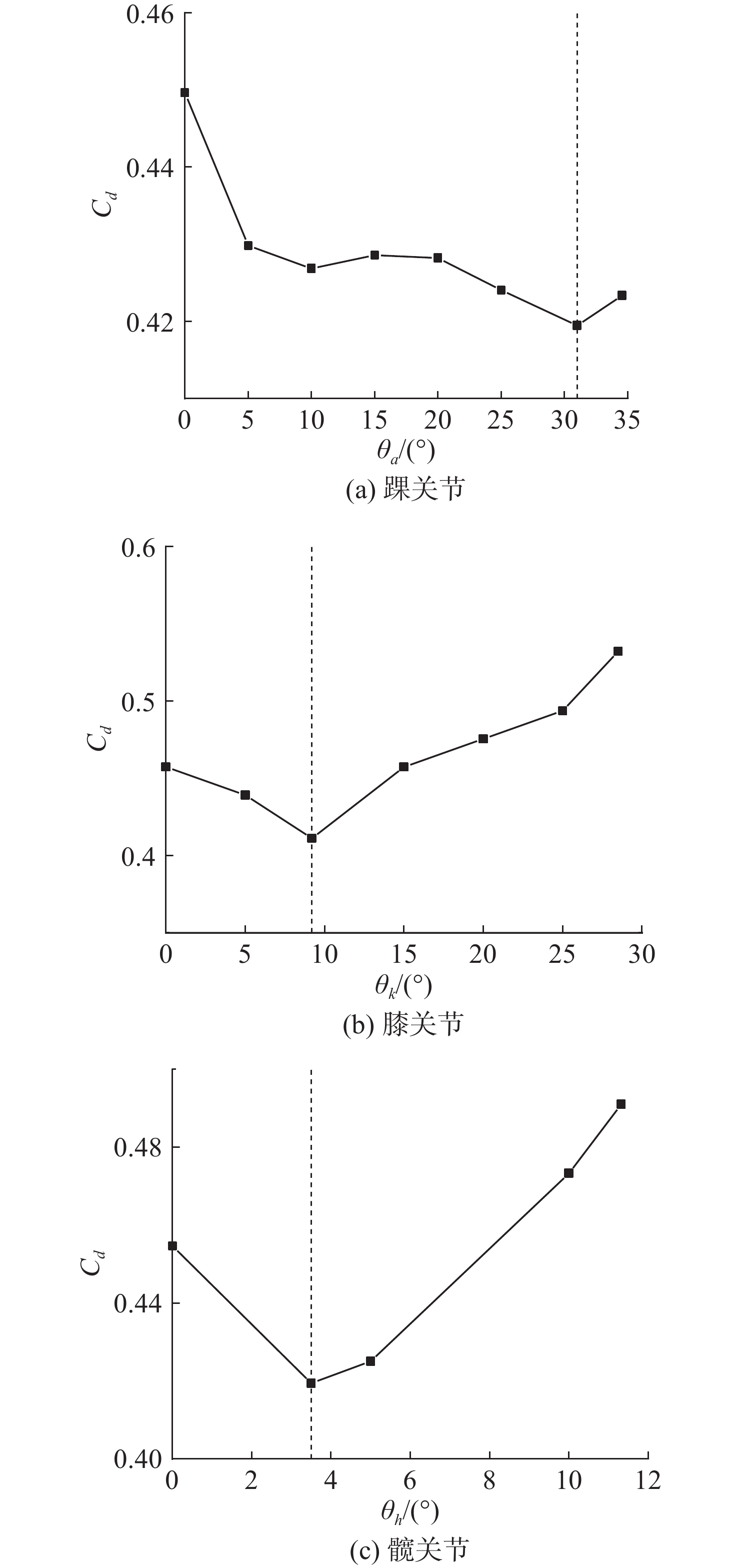
表 4 下肢关节临界角度与阻力系数的对应关系
Table 4. Correspondence between the critical lower limb joint angles and drag coefficient
关节 θst/(°) Cd,st θp/(°) Cd,p 阻力变化率/% 踝关节 31.9 0.430 31.0 0.419 2.6 膝关节 7.0 0.443 9.2 0.412 7.0 髋关节 4.2 0.436 3.5 0.421 3.4
下载: 导出CSV
表 5 不同航速时下肢关节角度Pareto最优解集
Table 5. Pareto optimal solution sets of lower limb joint angles at different navigation speeds
${{V}_{n}}/\text{kn} $ $ \theta_{a,\mathrm{opt}} /(^\circ )$ $ \theta_{k,\mathrm{opt}}/(^\circ ) $ $ \theta_{h,\mathrm{opt}}/(^\circ ) $ 1.0 29.6 12.3 6.7 1.5 30.0 11.5 5.6 2.0 30.3 10.9 4.4 2.5 30.6 10.3 3.7 3.0 30.8 9.8 3.4
下载: 导出CSV
表 6 不同航速下下肢关节角度阻力系数
Table 6. Drag coefficient of lower limb joint angles at different speeds
Vn/kn $ {\theta }_{a,\mathrm{o}\mathrm{p}\mathrm{t}} $ $ {\theta }_{a,\mathrm{s}\mathrm{t}} $ $ {\theta }_{k,\mathrm{o}\mathrm{p}\mathrm{t}} $ $ {\theta }_{k,\mathrm{s}\mathrm{t}} $ $ {\theta }_{h,\mathrm{o}\mathrm{p}\mathrm{t}} $ $ {\theta }_{h,\mathrm{s}\mathrm{t}} $ 1.0 0.420 0.421 0.428 0.454 0.443 0.460 1.5 0.425 0.450 0.424 0.458 0.429 0.472 2.0 0.432 0.437 0.430 0.435 0.442 0.450 2.5 0.430 0.439 0.410 0.437 0.432 0.444 3.0 0.419 0.430 0.412 0.443 0.421 0.436
下载: 导出CSV
表 7 不同实验方案下蛙人航行实验结果
Table 7. Experimental results of frogman navigation under different protocols
实验方案 时间/s 速度/kn 最大功率/W 优化姿态 24.5 2.4 1 100 自由状态 26.7 2.2 1 100
下载: 导出CSV
-
[1] 何永兰. 海洋经济发展潜力研究[J]. 合作经济与科技, 2024, (7): 17-21. doi: 10.3969/j.issn.1672-190X.2024.10.006 [2] 邓红超, 刘本奇, 史磊. 水下蛙人安防系统现状及发展趋势[C]//2022年中国西部声学学术交流会. 乌鲁木齐, 中国: 上海船舶电子设备研究所, 2022: 312-316. [3] 张志伟, 方泽江, 何润民, 等. 美军水下特种作战装备的发展现状及趋势分析[J]. 水下无人系统学报, 2024, 32(5): 962-970.ZHANG Z W, FANG Z J, HE R M, et al. Development status and trend of U. S. equipment for underwater special operations[J]. Journal of Unmanned Undersea Systems, 2024, 32(5): 962-970. [4] 刘宁, 李珊, 茶文丽. 蛙人装备研究现状及发展展望[J]. 中国造船, 2018, 59(4): 212-222. doi: 10.3969/j.issn.1000-4882.2018.04.023 [5] 刘文武, 俞旭华, 徐佳骏, 等. 湿式蛙人输送艇水下风险应急处置刍议[J]. 水下无人系统学报, 2022, 30(6): 815-819. doi: 10.11993/j.issn.2096-3920.2022-0056LIU W W, YU X H, XU J J, et al. Emergent treatment of underwater risks related to wet diver delivery vehicle[J]. Journal of Unmanned Undersea Systems, 2022, 30(6): 815-819. doi: 10.11993/j.issn.2096-3920.2022-0056 [6] 黎洁, 范军, 李兵. 蛙人推进器声散射特性研究[J]. 水下无人系统学报, 2022, 30(6): 733-739. doi: 10.11993/j.issn.2096-3920.2022-0026LI J, FAN J, LI B. Acoustic scattering characteristics of a diver propulsion vehicle[J]. Journal of Unmanned Undersea Systems, 2022, 30(6): 733-739. doi: 10.11993/j.issn.2096-3920.2022-0026 [7] 付学志, 石建飞, 江源. 蛙人水下作战系统装备发展现状及趋势[J]. 电声技术, 2019, 43(12): 11-17.FU X Z, SHI J F, JIANG Y. The development of the frogman underwater combat equipment system[J]. Audio Engineering, 2019, 43(12): 11-17. [8] 朱敏, 张镇, 杨壮滔, 等. 国外水面/水下两用艇水动力设计启示[J]. 水下无人系统学报, 2022, 30(6): 714-719. doi: 10.11993/j.issn.2096-3920.2022-0022ZHU M, ZHANG Z, YANG Z T, et al. Inspiration of hydrodynamic design of surface/underwater dual-purpose vehicle[J]. Journal of Unmanned Undersea Systems, 2022, 30(6): 714-719. doi: 10.11993/j.issn.2096-3920.2022-0022 [9] QIN H, LI Z, XU S, et al. Review of diver propulsion vehicle: A review[J]. Physics of Fluids, 2024, 36(10): 25. [10] XIA H, KHAN A M, LI Z, et al. Wearable robots for human underwater movement ability enhancement: A survey[J]. IEEE/CAA Journal of Automatica Sinica, 2022, 9(6): 967-977. [11] YIN R, LI L, WANG L, et al. Self-healing Au/PVDF-HFP composite ionic gel for flexible underwater pressure sensor[J]. Journal of Semiconductors, 2023, 44(3): 80-98. [12] LIN G, LI H, MA H, et al. Human-in-the-loop consensus control for nonlinear multi-agent systems with actuator faults[J]. IEEE/CAA Journal of Automatica Sinica, 2022, 9(1): 111-122. [13] NEUHAUS P D, O’ SULLIVAN M O, EATON D, et al. Concept designs for underwater swimming exoskeletons[C]//2004 IEEE International Conference on Robotics and Automation. New Orleans, LA, USA: IEEE, 2004: 4893-4898. [14] 王斌. 水下助推机器人的人体运动意图感知方法研究[D]. 成都: 电子科技大学, 2020. [15] 李兴勇. 水下助推机器人控制系统设计[D]. 成都: 电子科技大学, 2017. [16] 秦睿. 水下外骨骼机器人动力学特性研究[D]. 成都: 电子科技大学, 2017. [17] ZHANG Z D, ZHOU Z H, ZHENG E H, et al. Concept and prototype design of an underwater soft exoskeleton[C]//IEEE International Conference on Cyborg and Bionic Systems(CBS). Shenzhen, China: IEEE, 2018: 139-143. [18] WANG Q N, ZHOU Z H, ZHANG Z D, et al. An underwater lower-extremity soft exoskeleton for breaststroke assistance[J]. IEEE Transactions on Medical Robotics and Bionics. 2020, 2(3): 447-462. [19] ZAÏDI H, FOHANNO S, TAÏAR R, et al. Turbulence model choice for the calculation of drag forces when using the CFD method[J]. Journal of Biomechanics. 2009, 43(3): 405-411. [20] LI H S, HAN F L, ZHU H T, et al. Hydrodynamic model of diver-DPV coupled multi-body and its underwater cruising numerical simulation[J]. Journal of Marine Science and Engineering, 2021, 9(2): 140. doi: 10.3390/jmse9020140 [21] 夏鹏泽, 曾长松, 王永成, 等. 中国军人基准人体模型系列: CHN. 03141014.6[P]. 2005-01-19. [22] 潘慧炬, 马楚虹, 沈水富. 人体四肢各主要关节最大运动幅度的研究[J]. 浙江师大学报(自然科学版), 1995, 18(3): 64-68.PAN H J, MA C H, SHEN S F. A Research on the maximum range of motion of each major joint in human limbs in both dynamic and static states[J]. Journal of ZheJiang Normal University(Natural Sciences), 1995, 18(3): 64-68. [23] YANG J, LI T Z, CHEN Z Y, et al. Hydrodynamic characteristics of different undulatory underwater swimming positions based on multi-body motion numerical simulation method[J]. International Journal of Environmental Research and Public Health, 2021, 18(22): 12263. doi: 10.3390/ijerph182212263 [24] ENGELS T, KOLOMENSKIY D, SCHNEIDER K, et al. Numerical simulation of vortex-induced drag of elastic swimmer models[J]. Theoretical and Applied Mechanics Letters, 2017, 7(5): 280-285. [25] 王新峰, 王连泽, 阎卫星. 游泳运动中静态阻力的数值模拟[J]. 北京体育大学学报, 2005(2): 206-207. doi: 10.3969/j.issn.1007-3612.2005.02.023WANG X F, WANG L Z, YAN W X. Numerical simulation of stiction in swimming[J]. Journal of Beijing Sport University, 2005(2): 206-207. doi: 10.3969/j.issn.1007-3612.2005.02.023 [26] YANG H, LIU N, LI M, et al. Design and optimization of heat pipe-assisted liquid cooling structure for power battery thermal management based on NSGA-II and entropy Weight-TOPSIS method[J]. Applied Thermal Engineering, 2025, 272: 126416. doi: 10.1016/j.applthermaleng.2025.126416 [27] ABBAS M Y, ALSAIF A. Multi-functional optimization of mechanical strength and electrical properties in graphite-reinforced cement composites using a hybrid CatBoost-NSGA-II framework[J]. Materials Today Communications, 2025, 46: 112716. doi: 10.1016/j.mtcomm.2025.112716 [28] FANG J, TAN C Y, TAI C V, et al. Multi-objective optimization of the surface roughness of Ti-Sic composites using NSGA-II based on TOPSIS and Box-Behnken design[J]. Journal of Materials Engineering and Performance, 2025: 1-17. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 361
- HTML全文浏览量: 183
- PDF下载量: 60
- 被引次数: 0