A Verification Method of Formation Control of USV Cluster Based on Virtual-Real Integration
-
摘要: 在无人艇(USV)技术研究领域, 自主算法的验证与优化是推动该领域技术发展的关键环节, 对于提升系统可靠性、环境适应性和任务执行效能具有重要的研究价值。随着数字孪生技术的快速发展, 基于虚实融合的验证方法已成为智能控制算法研究的重要技术手段。鉴于此, 文中提出了基于虚实融合的USV集群编队控制验证方法。首先, 提出了面向USV集群的虚实融合五维模型概念, 为试验验证提供理论基础; 其次, 搭建了USV物理实验平台, 可在实际海洋环境进行自主航行与控制; 然后, 采用Unity3D软件搭建虚拟实验环境, 建模海上环境和USV模型, 并与实际物理节点实现了通信。最后, 设计无人自主控制算法, 实现了USV编队控制。实验结果表明, 文中提出的系统方法能够有效用于USV集群自主算法的验证, 为未来海上无人装备智能协同作战和模拟对抗训练提供了新思路和新范式。Abstract: In the research field of unmanned surface vessel(USV) technology, the verification and optimization of autonomous algorithms are crucial for advancing this technology and have important research significance for improving system reliability, environmental adaptability, and mission execution efficiency. With the rapid development of digital twin technology, validation methods based on virtual-real integration have become key technical approaches in intelligent control algorithm research. In this context, this paper proposed a verification method for formation control of a USV cluster based on virtual-real integration. First, the concept of a five-dimensional virtual-real integration model for a USV cluster was introduced, providing a theoretical basis for experimental validation. Second, a physical USV experimental platform was constructed to enable autonomous navigation and control in real maritime environments. Third, a virtual test environment was developed using Unity3D software to model the maritime environment and USV models, and real-time communication with physical nodes was established. Finally, an unmanned autonomous control algorithm was designed to achieve formation control of the USV cluster. Experimental results show that the proposed method can effectively validate autonomous algorithms for USV clusters, providing new perspectives and paradigms for intelligent cooperative operations and simulation-based confrontation training of future maritime unmanned systems.
-
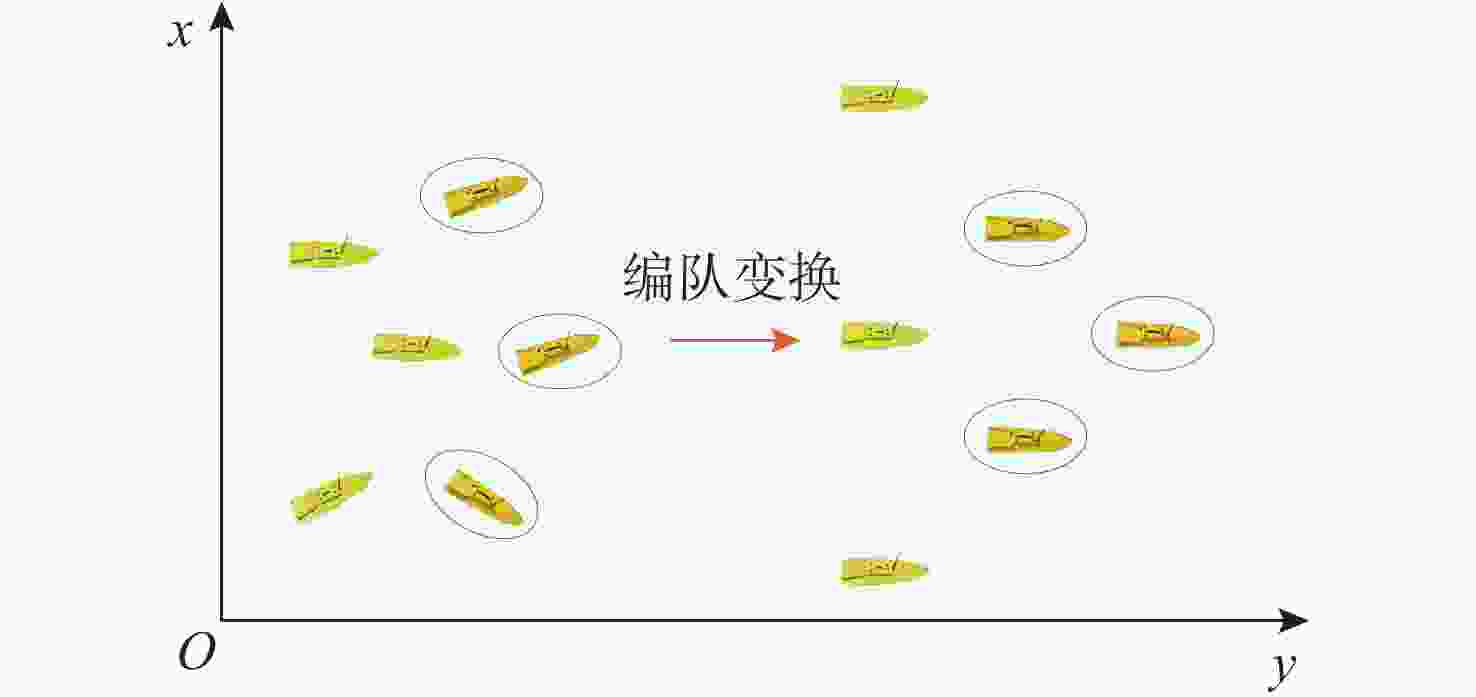
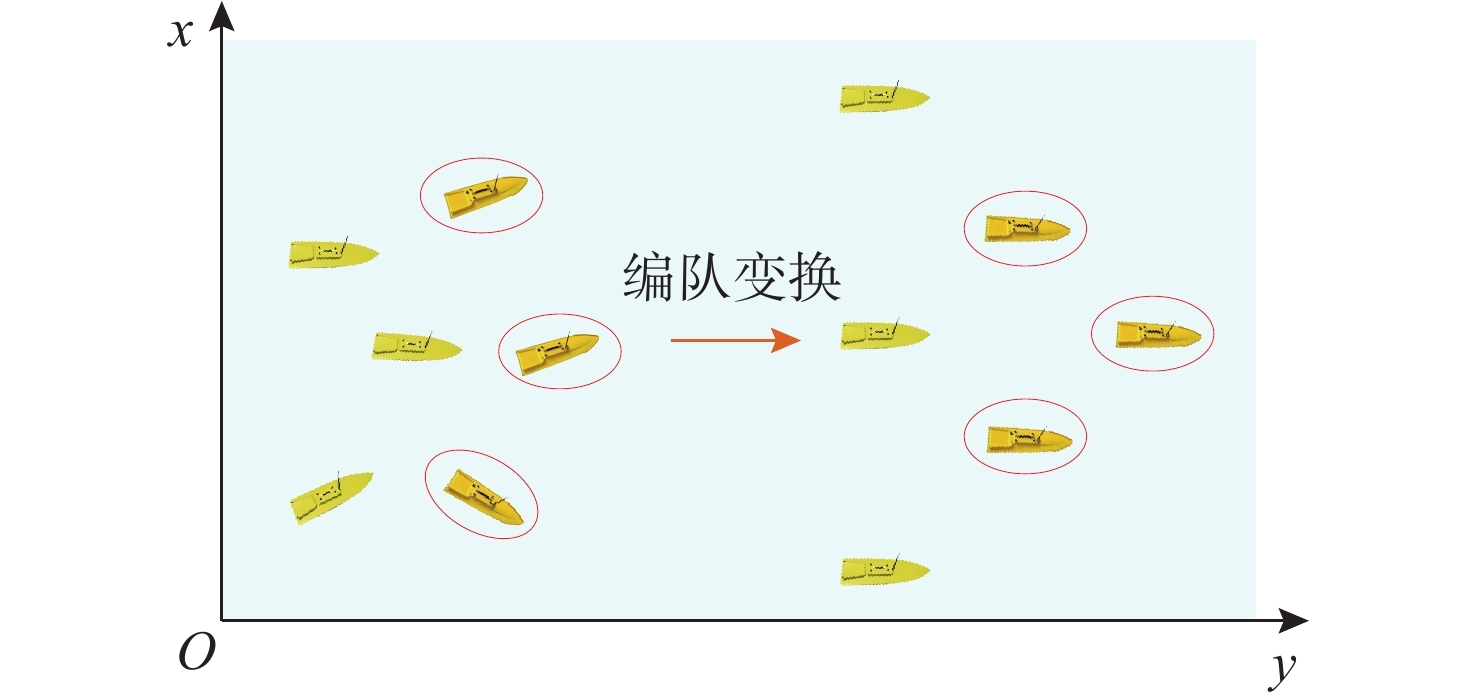
图 1 基于虚实融合的USV集群编队控制过程示意图
Figure 1. Schematic diagram of the formation control process of USV cluster based on virtual-real integration
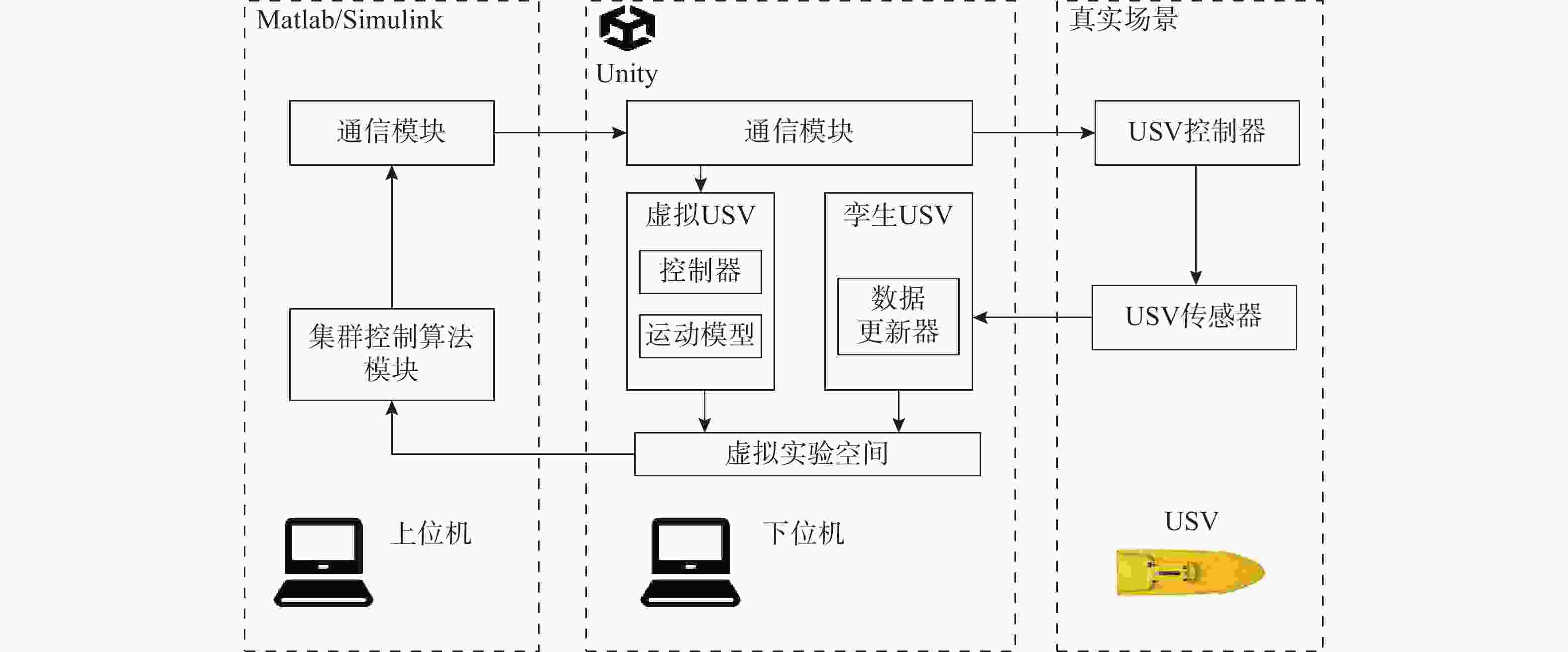
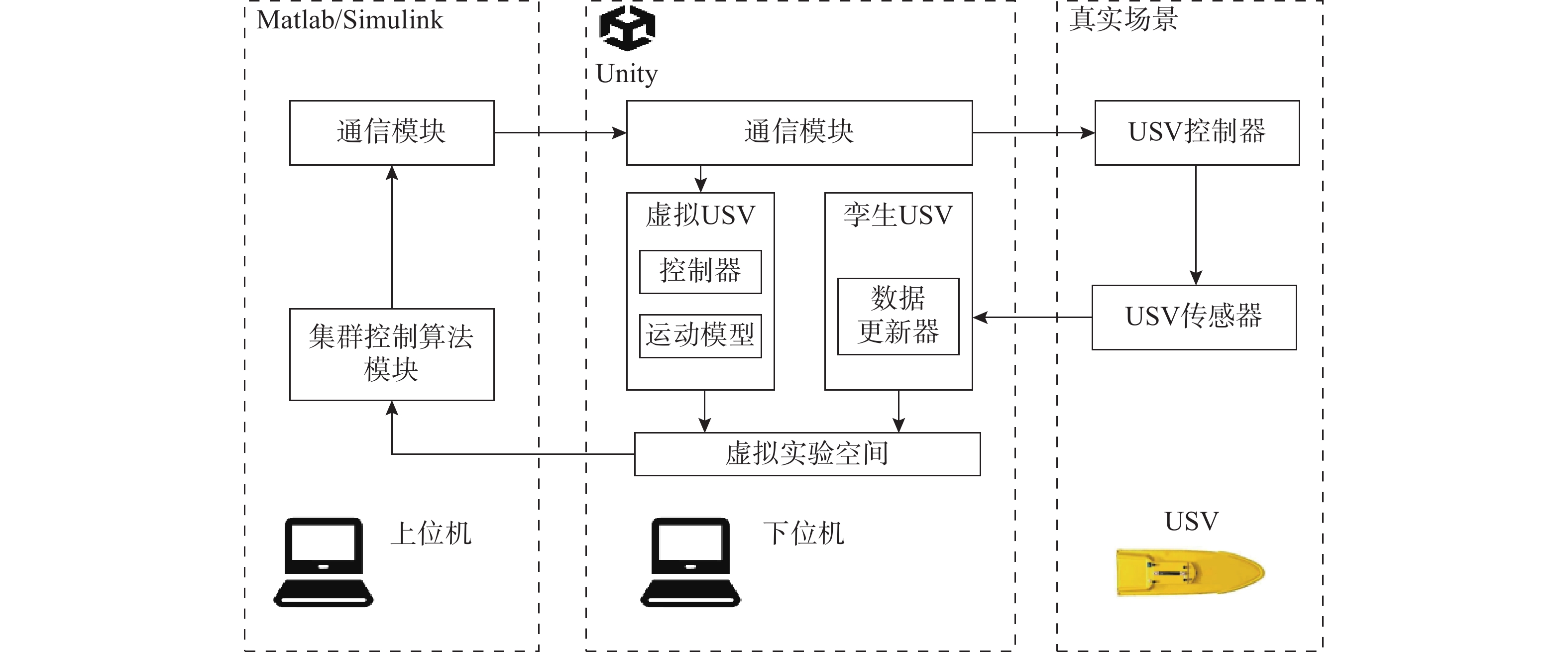
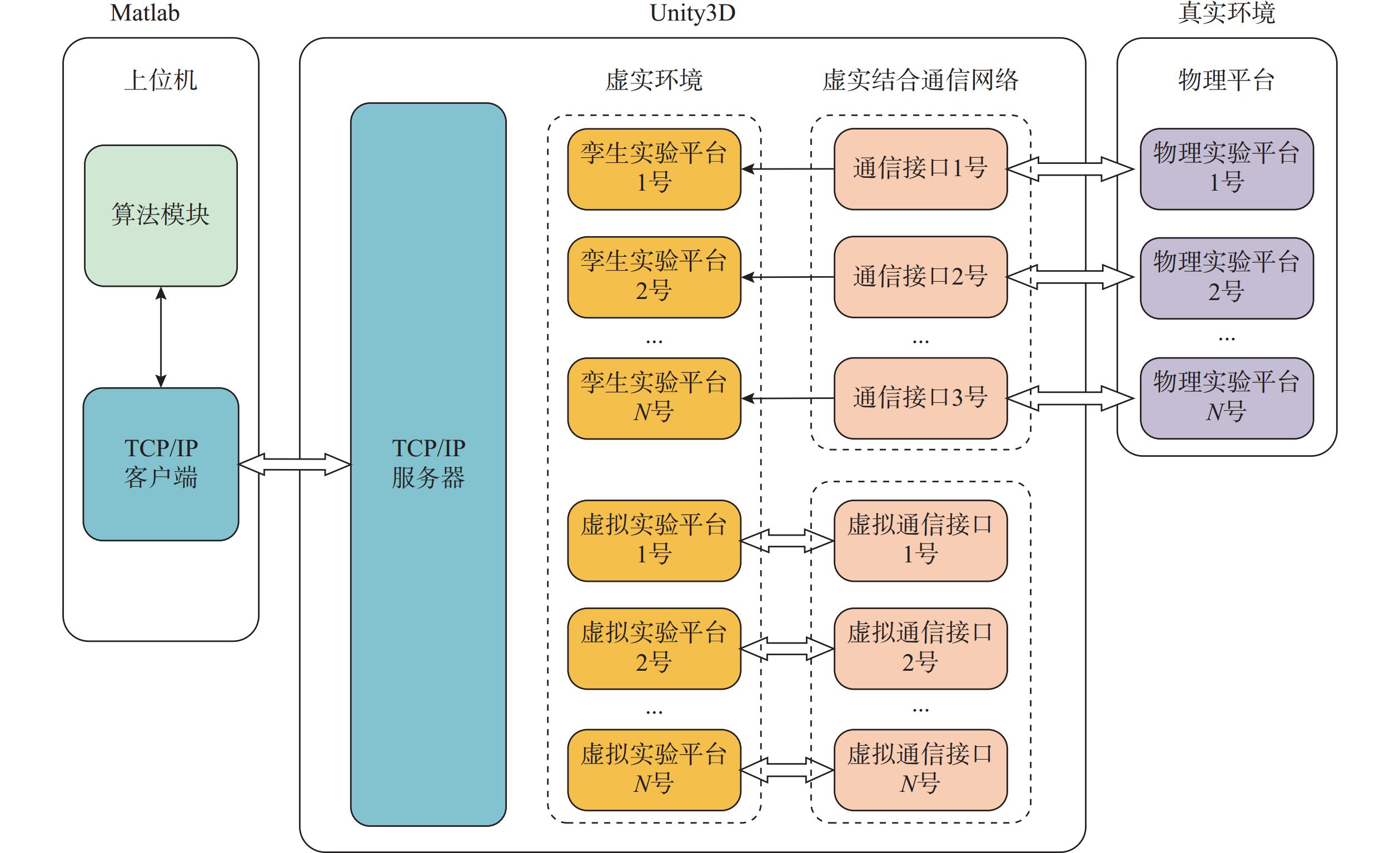
图 2 面向USV集群的虚实融合五维模型工作流程图
Figure 2. Flow chart of the five-dimensional virtual-real integration model for USV cluster
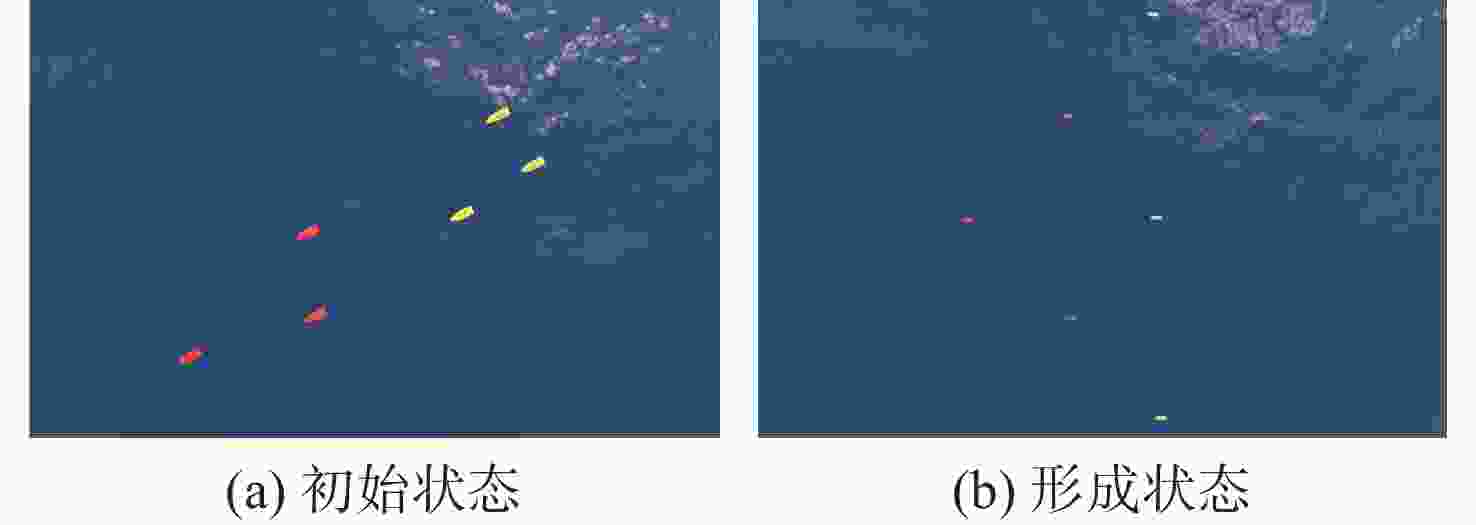
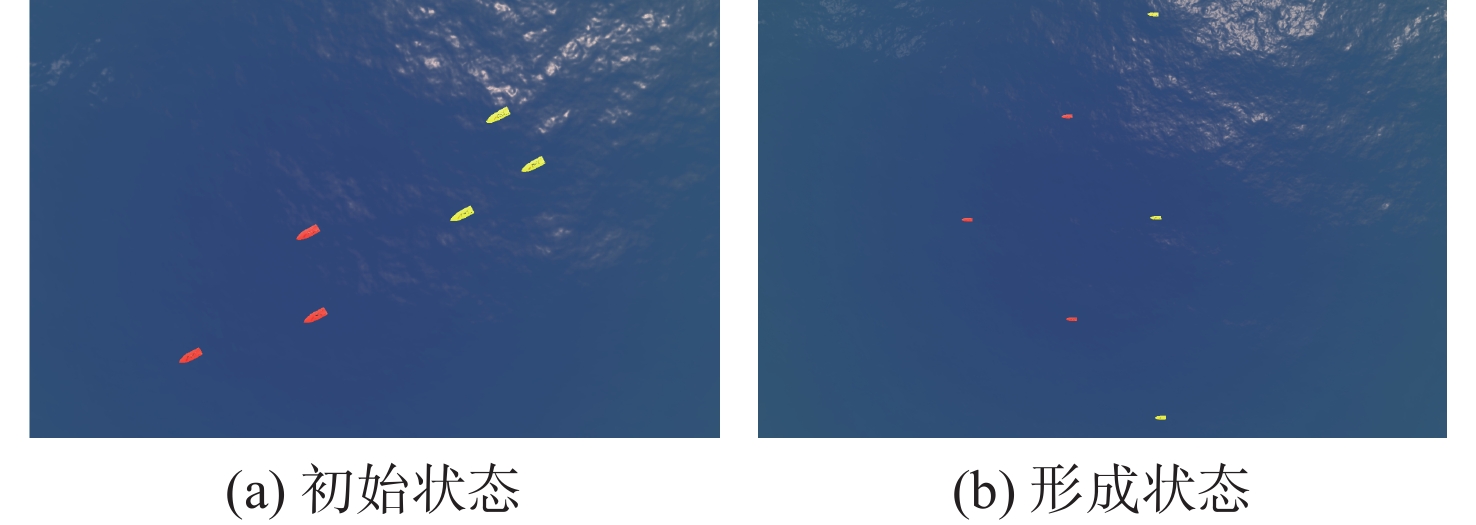
图 7 同构编队实验初始状态与形成状态对比图
Figure 7. Comparison of initial and formation states in homogeneous formation experiment
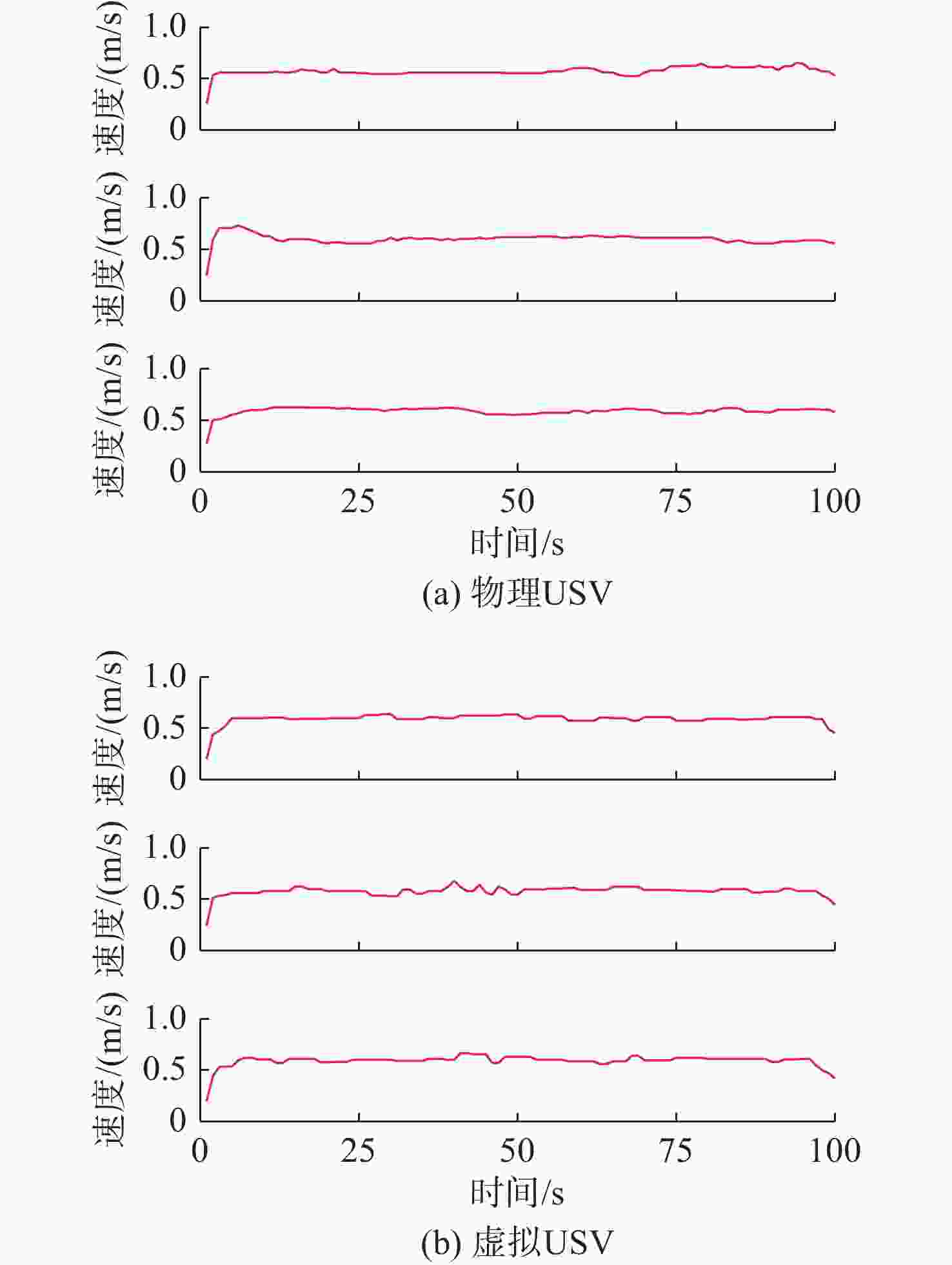
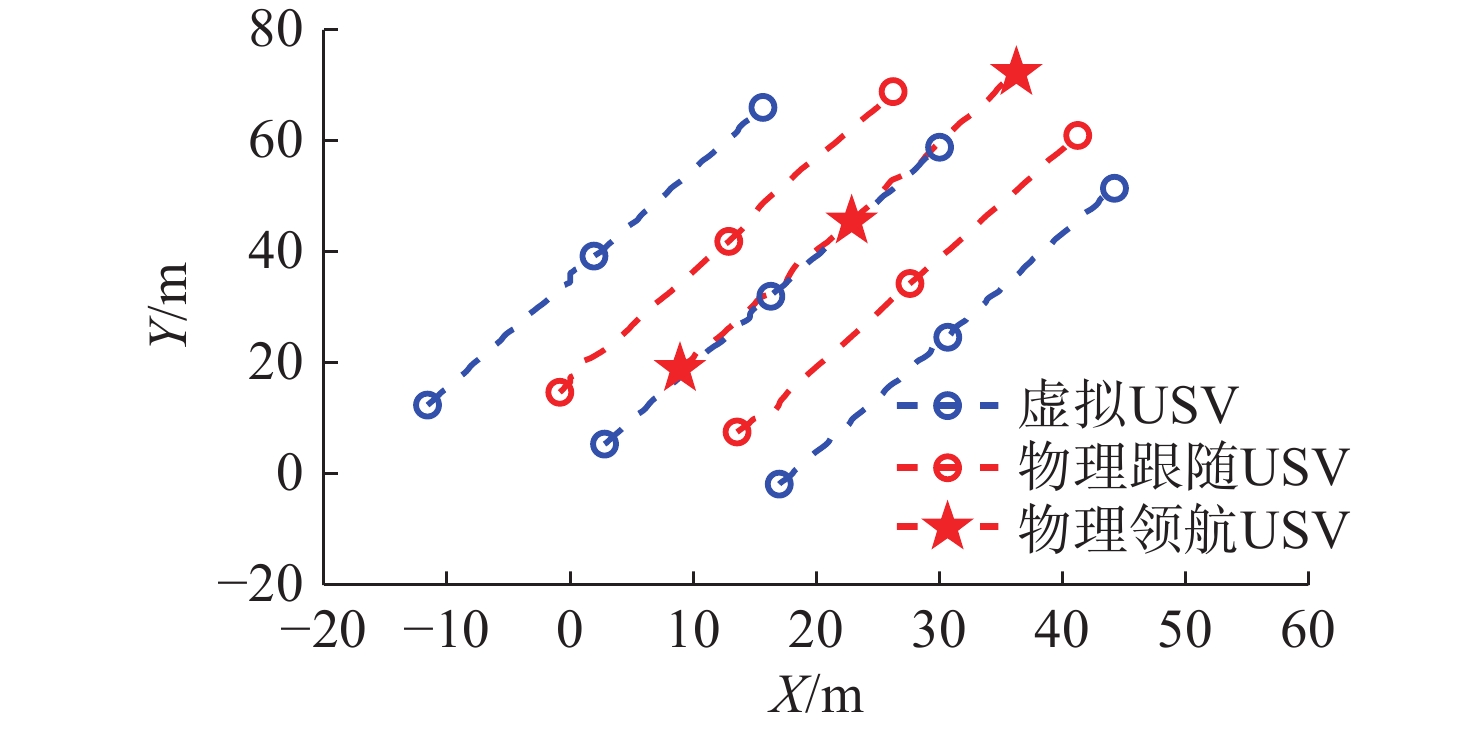
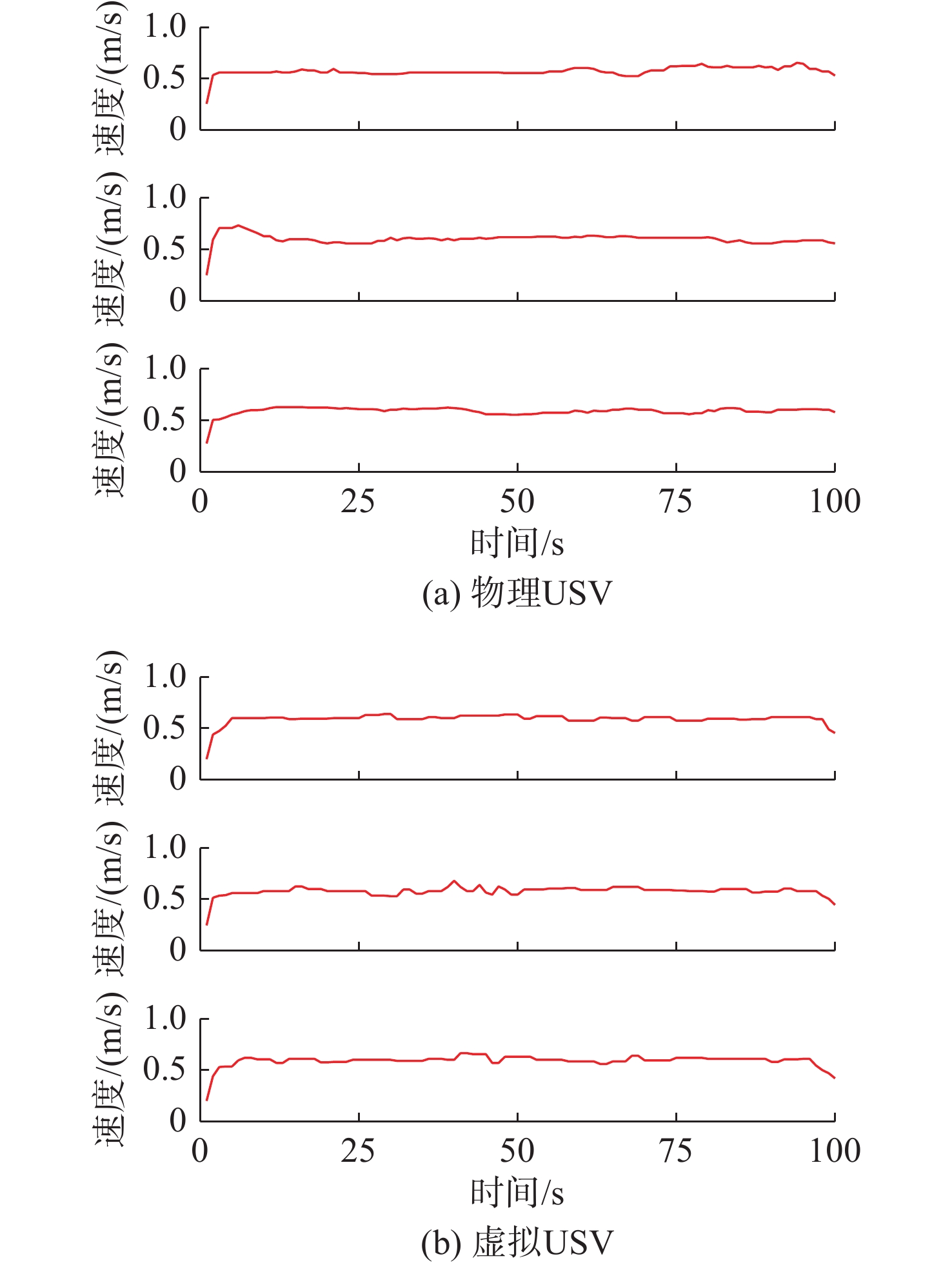
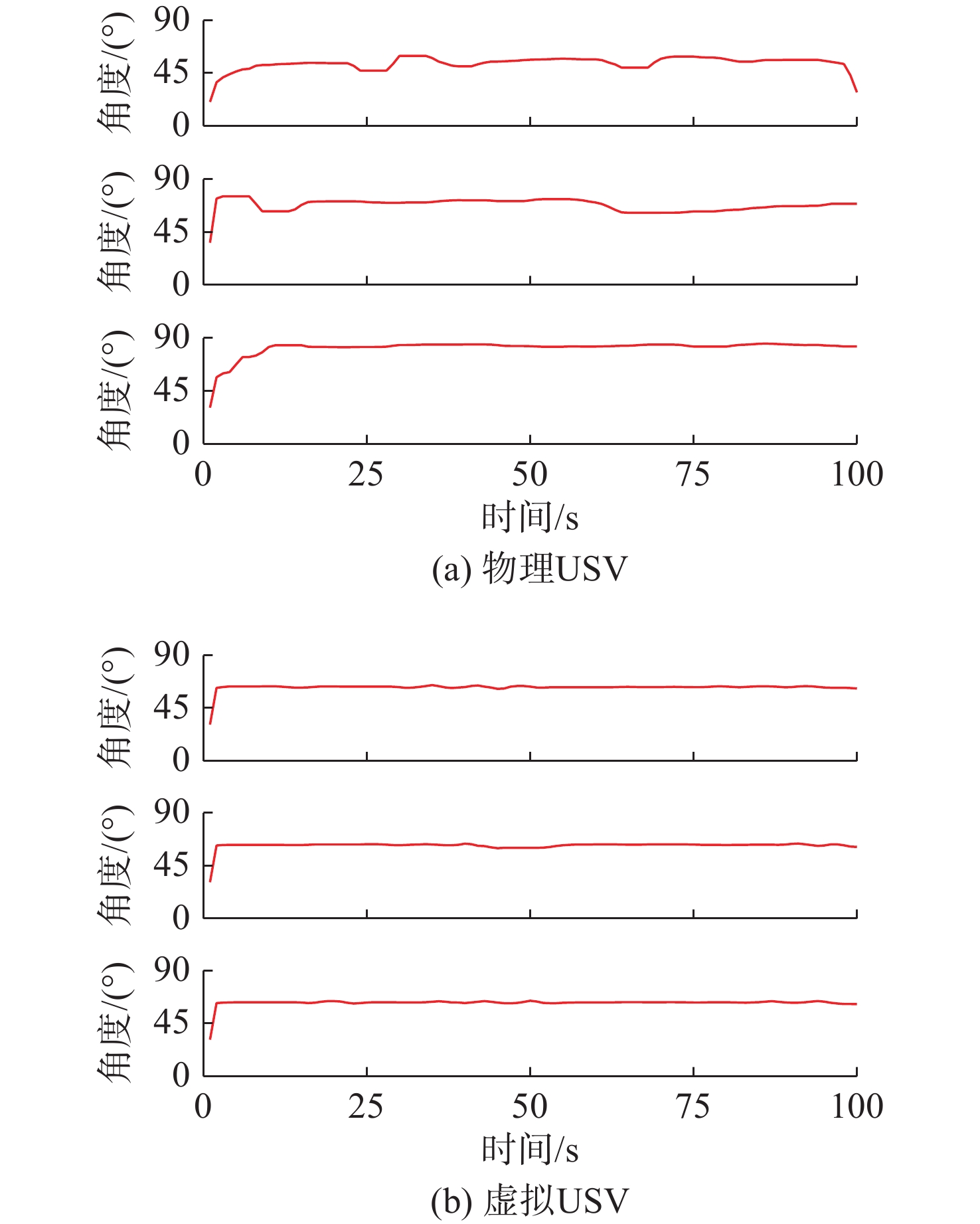
图 10 USV集群编队保持速度分布图
Figure 10. Velocity distribution of the USV cluster during formation maintenance
-
[1] 宋吉广, 李德隆, 冯亮, 等. 基于感知信息的USV目标环绕跟踪方法[J]. 水下无人系统学报, 2023, 31(5): 696-702. doi: 10.11993/j.issn.2096-3920.202206011SONG J G, LI D L, FENG L, et al. Target surround tracking method of USVs based on perception information[J]. Journal of Unmanned Undersea Systems, 2023, 31(5): 696-702. doi: 10.11993/j.issn.2096-3920.202206011 [2] 郭苗, 徐琰锋, 陈铢蕾. 基于博弈论的无人艇探查策略研究[J]. 水下无人系统学报, 2022, 30(6): 754-760. doi: 10.11993/j.issn.2096-3920.2022-0032GUO M, XU Y F, CHEN Z L. Research on unmanned surface vehicle detection strategy based on game theory[J]. Journal of Unmanned Undersea Systems, 2022, 30(6): 754-760. doi: 10.11993/j.issn.2096-3920.2022-0032 [3] LI J, ZHANG G, JIANG C, et al. A survey of maritime unmanned search system: Theory, applications and future directions[J]. Ocean Engineering, 2023, 285: 11535. [4] 于长东, 刘新阳, 陈聪, 等. 基于多智能体深度强化学习的无人艇集群博弈对抗研究[J]. 水下无人系统学报, 2024, 32(1): 79-86. doi: 10.11993/j.issn.2096-3920.2023-0159YU C D, LIU X Y, CHEN C, et al. Research on game confrontation of unmanned surface vehicles swarm based on multi-agent deep reinforcement learning[J]. Journal of Unmanned Undersea Systems, 2024, 32(1): 79-86. doi: 10.11993/j.issn.2096-3920.2023-0159 [5] 梁霄, 陈聪, 刘殿勇, 等. 面向自杀式无人机饱和攻击的海空跨域无人协同反制策略[J]. 水下无人系统学报, 2024, 32(2): 228-236. doi: 10.11993/j.issn.2096-3920.2024-0007LIANG X, CHEN C, LIU D Y, et al. Cooperative countermeasure strategy of sea-air cross-domain unmanned platforms for saturation attack of suicide UAVs[J]. Journal of Unmanned Undersea Systems, 2024, 32(2): 228-236. doi: 10.11993/j.issn.2096-3920.2024-0007 [6] 王志洋, 王龙金. 基于改进遗传算法的无人艇集群多任务分配路径规划[J]. 船舶工程, 2024, 46(4): 105-111.WANG Z Y, WANG L J. Global path planning for multi-task assignment based on improved genetic algorithm for multi-USV[J]. Ship Engineering, 2024, 46(4): 105-111. [7] YANG W, ZHONG W, ZHANG L, et al. A virtual reality approach to the assessment of damage effectiveness of naval artillery ammunition against unmanned surface vessels[J]. IEEE Access, 2023, 11: 93500-93510. doi: 10.1109/ACCESS.2023.3310214 [8] GAN W H, QU X Q, SONG D L, et al. Multi-USV cooperative chasing strategy based on obstacles assistance and deep reinforcement learning[J]. IEEE Transactions on Automation Science and Engineering, 2023, 21(4): 5895-5910. [9] ZHAO Y, HAN F, HAN D, et al. Decision-making for the autonomous navigation of USVs based on deep reinforcement learning under IALA maritime buoyage system[J]. Ocean Engineering, 2022, 266: 112557. doi: 10.1016/j.oceaneng.2022.112557 [10] ABU-AMARA F, BENSEFIA A, MOHAMMAD H, et al. Robot and virtual reality-based intervention in autism: A comprehensive review[J]. International Journal of Information Technology, 2021, 13(5): 1879-1891. doi: 10.1007/s41870-021-00740-9 [11] WANG S, LAMBETA M, CHOU P W, et al. Tacto: A fast, flexible, and open-source simulator for high-resolution vision-based tactile sensors[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 3930-3937. doi: 10.1109/LRA.2022.3146945 [12] ACOSTA B, YANG W, POSA M. Validating robotics simulators on real-world impacts[J]. IEEE Robotics and Automation Letters, 2022, 7(3): 6471-6478. doi: 10.1109/LRA.2022.3174367 [13] BRUNO F, BARBIERI L, MANGERUGA M, et al. Underwater augmented reality for improving the diving experience in submerged archaeological sites[J]. Ocean Engineering, 2019, 190: 106487. doi: 10.1016/j.oceaneng.2019.106487 [14] BUKHARI A C, KIM Y G. A research on an intelligent multipurpose fuzzy semantic enhanced 3D virtual reality simulator for complex maritime missions[J]. Applied Intelligence, 2013, 38: 193-209. doi: 10.1007/s10489-012-0365-9 [15] NIE Y, LUAN X, GAN W, et al. Design of marine virtual simulation experiment platform based on Unity3D[C]//Global Oceans 2020: Singapore-US Gulf Coast. Biloxi, MS, USA: IEEE, 2020: 1-5. [16] LI H, HUANG F, CHEN Z. Virtual-reality-based online simulator design with a virtual simulation system for the docking of unmanned underwater vehicle[J]. Ocean Engineering, 2022, 266: 112780. doi: 10.1016/j.oceaneng.2022.112780 [17] HU J, YANG X, LOU M, et al. Virtual-reality-based design and implementation with a parallel physical simulation platform for unmanned surface vehicle[C]//2023 International Conference on Cyber-Physical Social Intelligence(ICCSI). Xi’an, China: IEEE, 2023: 262-267. [18] 苏星宇. 基于领航-跟随法的无人艇编队控制研究[D]. 哈尔滨: 哈尔滨工程大学, 2023. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 628
- HTML全文浏览量: 292
- PDF下载量: 158
- 被引次数: 0