

Three-Dimensional Reconstruction Method of Submarine Cables Based on High-Speed ROV Cruising with Multibeam Imaging Sonar
-
摘要: 海底电缆(简称海缆)是海上风力发电场电能输送的关键通道, 其安全运行对系统稳定性至关重要。然而,海缆所处环境复杂, 目前常规的三维重建方法成本高, 且在深海环境下适应性差。为此, 文中提出一种基于高速遥控水下航行器(ROV)巡航的多波束图像声呐海缆三维重建方法。该方法借鉴了合成孔径思想, 并采用空间雕刻算法简化计算, 综合处理ROV巡航过程中多次声呐观测信息共同反映的空间占据情况。仿真试验结果表明,相较于主流方法,文中方法在使用常规的多波束图像声呐的情况下不仅降低了海缆重建的成本, 还能实现更高的重建精度, 具有良好的应用价值和推广潜力。Abstract: Submarine cables, serving as the critical conduits for power transmission for offshore wind farms, are pivotal to the system’s stability. However, due to their complex marine environments, currently, conventional three-dimensional(3D) reconstruction methods for submarine cables are costly and demonstrate poor adaptability in deep-sea environments. Therefore, this paper proposed a 3D reconstruction method for submarine cables based on high-speed remotely operated vehicle(ROV) cruising with multibeam imaging sonar, drawing on the concept of synthetic aperture and simplifying calculations through a spatial carving algorithm. This method comprehensively processed the multiple sonar observation information obtained during the ROV cruising to collectively reflect the spatial occupancy. The simulation test results show that, compared with the mainstream methods, the proposed method not only reduces the cost of submarine cable reconstruction by using conventional multibeam imaging sonar but also achieves higher reconstruction accuracy, demonstrating significant application value and promotion potential.
-
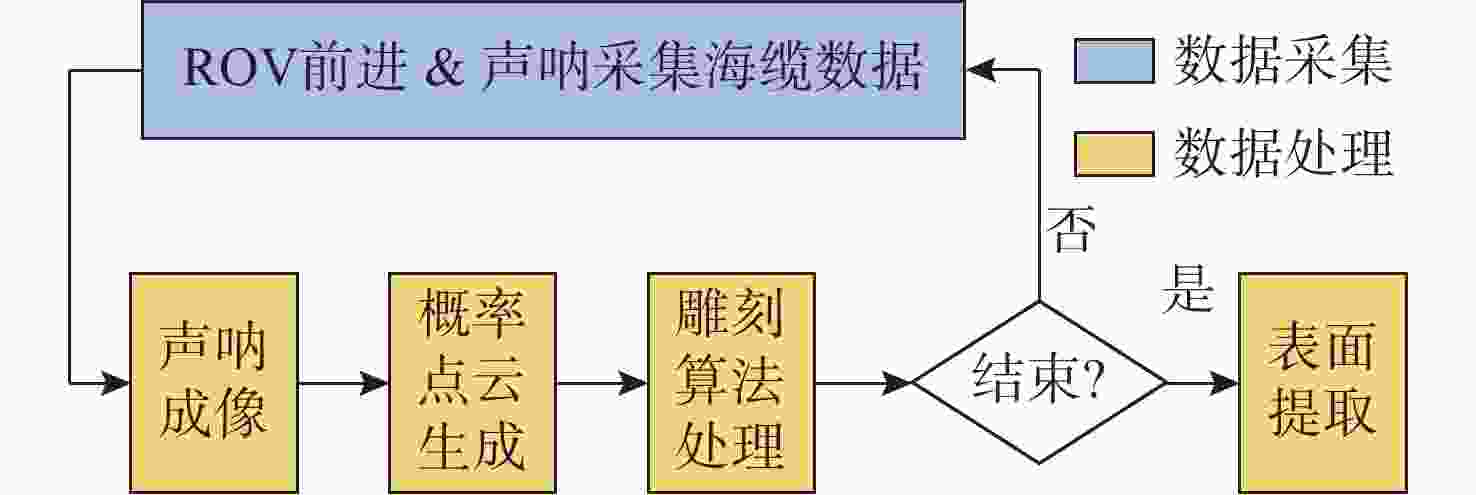
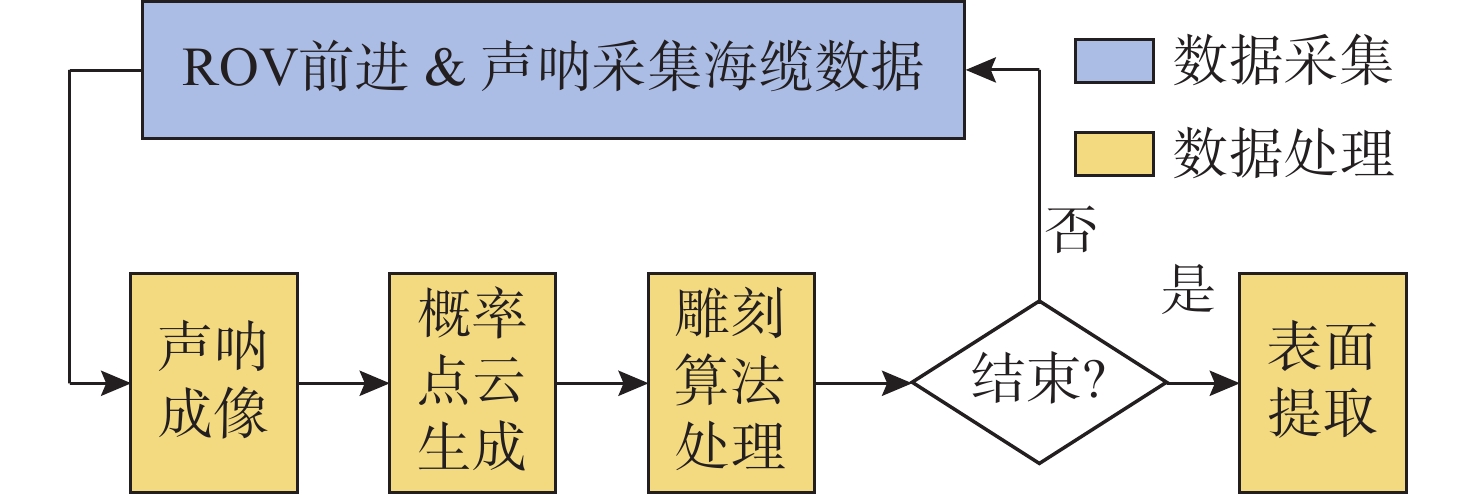
图 5 高速ROV海缆三维重建算法流程图
Figure 5. Flow chart of the high-speed ROV submarine cable 3D reconstruction algorithm
表 1 MS400P与M750d参数对比
Table 1. Comparison of MS400P and M750d parameters
设备 垂直开角/(°) 波束开角/(°) 波束数 更新频率/Hz MS400P 2 143 512 20 M750d 20 130  下载: 导出CSV
下载: 导出CSV
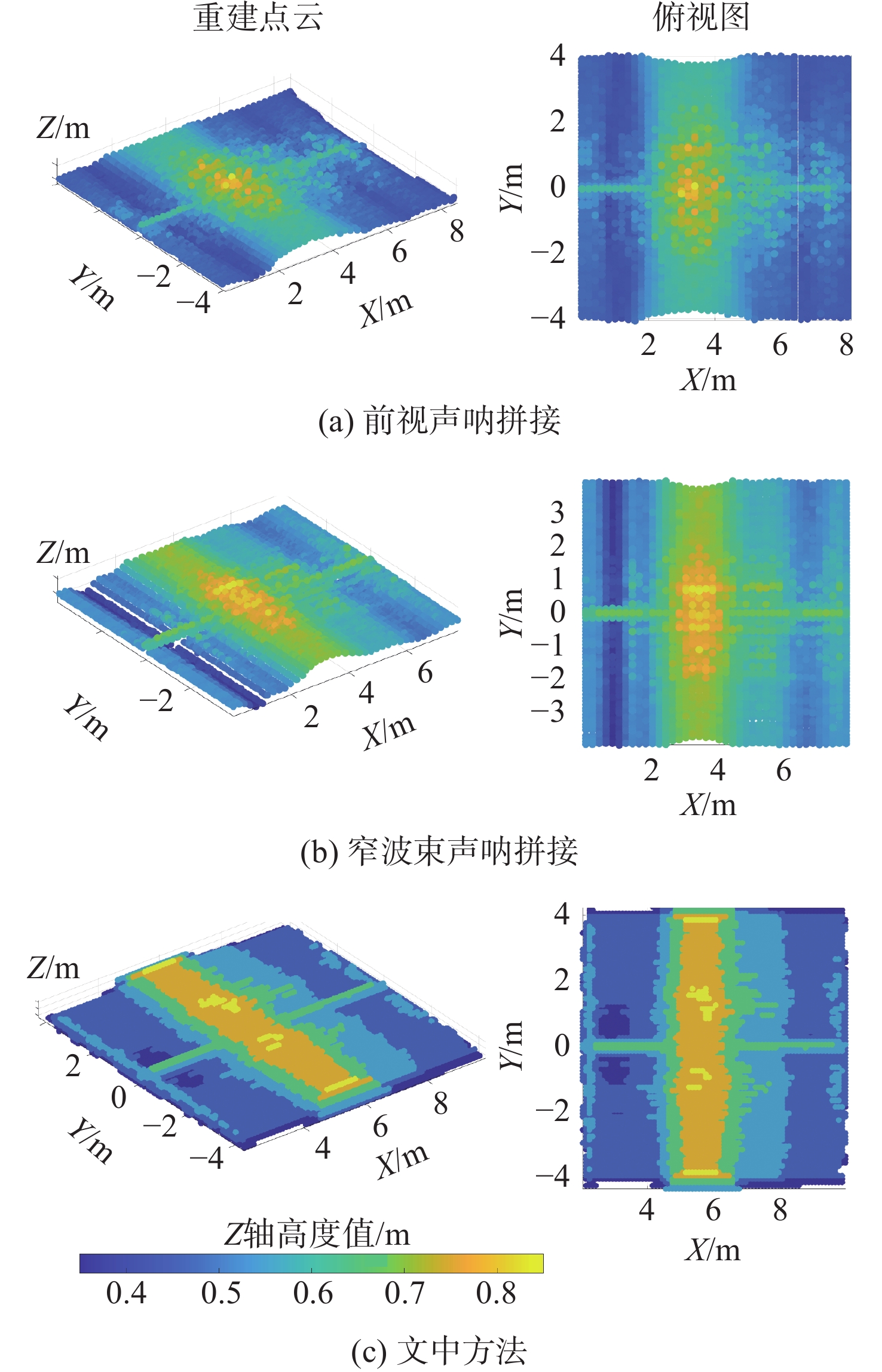
表 2 重建结果定量分析
Table 2. Quantitative analysis of the reconstruction results
实验组 裸露段
长度/mm裸露段
误差/%悬空段
长度/mm悬空段
误差/%1 548.23 9.11 39.24 58.30 2 617.98 2.45 57.77 38.62 3 596.15 1.16 91.25 3.05
下载: 导出CSV
-
[1] JIE W, YAO T F. Study on safety monitoring system for submarine power cable on the basis of AIS and radar technology[J]. Physics Procedia, 2012, 24: 961-965. [2] 李晶. 海底电缆外部探测方法与应用浅析[J]. 水道港口, 2018, 39(3): 365-369. doi: 10.3969/j.issn.1005-8443.2018.03.021LI J. Analysis on method and application of submarine cable detection[J]. Journal of Waterway and Harbor, 2018, 39(3): 365-369. doi: 10.3969/j.issn.1005-8443.2018.03.021 [3] 罗深荣. 侧扫声纳和多波束测深系统在海洋调查中的综合应用[J]. 海洋测绘, 2003(1): 22-24. doi: 10.3969/j.issn.1671-3044.2003.01.006LUO S R. Comprehensive utilization of side scan sonar and multi-beam sounding system in oceanographic research[J]. Hydrographic Surveying and Charting, 2003(1): 22-24. doi: 10.3969/j.issn.1671-3044.2003.01.006 [4] 毕继鑫, 吴文超, 占晓明. 多波束测深系统检测海底电缆及数据处理方法研究[J]. 海洋测绘, 2022, 42(2): 17-21. doi: 10.3969/j.issn.1671-3044.2022.02.004BI J X, WU W C, ZHAN X M. Research on the submarine cable detection by multi-beam systemand data processing method[J]. Hydrographic Surveying and Charting, 2022, 42(2): 17-21. doi: 10.3969/j.issn.1671-3044.2022.02.004 [5] 张建兴, 宋永东, 栾振东, 等. 声学探测技术在海底管道外检测中的应用[J]. 广西科学, 2020, 27(3): 217-224,327.ZHANG J X, SONG Y D, LUAN Z D, et al. Application of acoustic detection technology in the external detection of submarine pipeline[J]. Guangxi Sciences, 2020, 27(3): 217-224, 327. [6] 刘哲. 基于水下三维点云的管道检测定位算法研究[D]. 哈尔滨: 哈尔滨工程大学, 2020. [7] ARAÚJO FILHO L E S, CRESTANI G P, JÚNIOR C L N, et al. 3D reconstruction of a small dam using a profiling sonar and an UUV[C]//2022 IEEE International Systems Conference. Montreal, QC, Canada: IEEE, 2022: 1-7. [8] MAURELL I P, SANTOS M M, OLIVEIRA E, et al. Volume change estimation of underwater structures using 2-D sonar data[J]. IEEE Sensors Journal, 2022, 22(23): 23380-23392. doi: 10.1109/JSEN.2022.3213780 [9] 赵阳. 合成孔径声纳系统在海底掩埋电缆探测中的应用研究[J]. 科技资讯, 2021, 19(10): 68-70.ZHAO Y. The application and researchs of synthetic aperture sonar system in submarine buried cable detection[J]. Science & Technology Information, 2021, 19(10): 68-70. [10] ZHAO L, ZHOU M, LOOSE B, et al. Modifying an affordable ROV for under-ice sensing[C]//OCEANS 2021. San Diego, CA, USA: OCEANS, 2021: 1-5. [11] SNYDER J. Doppler velocity log navigation for observation-class ROVs[J]. Sea Technology: Worldwide Information Leader for Marine Business, Science & Engineering, 2010, 51(12): 27-30. [12] 牛泽民. 基于磁信号引导的水下机器人海缆自动跟踪技术研究[D]. 武汉: 华中科技大学, 2016. [13] 齐晓迪. 基于水深数据约束下的声呐图像海底地形恢复方法分析[J]. 工程技术研究, 2020, 5(21): 238-240. doi: 10.3969/j.issn.1671-3818.2020.21.109 [14] HAYES M P, GOUGH P T. Synthetic aperture sonar: A review of current status[J]. IEEE Journal of Oceanic Engineering, 2009, 34(3): 207-224. doi: 10.1109/JOE.2009.2020853 [15] WANG J K, CHEN F F, HUANG Y J, et al. Virtual maps for autonomous exploration of cluttered underwater environments[J]. IEEE Journal of Oceanic Engineering, 2022, 47(4): 916-935. doi: 10.1109/JOE.2022.3153897 [16] KUTULAKOS K N, SEITZ S M . A theory of shape by space carving[C]//Seventh IEEE International Conference on Computer Vision. Kerkyra, Greece: ICCV, 1999: 307-314 . [17] AYKIN M D, NEGAHDARIPOUR S. Forward-look 2-D sonar image formation and 3-D reconstruction[C]//2013 OCEANS-San Diego. San Diego, CA, USA: OCEANS, 2013: 1-10. [18] 宋家美. 多视角声纳图像的目标重建[D]. 哈尔滨: 哈尔滨工程大学, 2021. [19] 毛留磊. 基于DSP的多波束合成孔径声呐实时成像技术[D]. 哈尔滨: 哈尔滨工程大学, 2023. [20] AYKIN M D , NEGAHDARIPOUR S. Three-dimensional target reconstruction from multiple 2-D forward-scan sonar views by space carving[J]. IEEE Journal of Oceanic Engineering, 2017, 42(3): 574-589. [21] ZHANG M M, CHOI W S, HERMAN J, et al. DAVE aquatic virtual environment: Toward a general underwater robotics simulator[C]//IEEE/OES Autonomous Underwater Vehicle(AUV) Symposium. Singapore: IEEE, 2022: 1-8. [22] CHOI W, OLSON D R, DAVIS D, et al. Physics-based modelling and simulation of multibeam echosounder perception for autonomous underwater manipulation[J]. Frontiers in Robotics and AI, 2021, 8: 706646. doi: 10.3389/frobt.2021.706646 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 631
- HTML全文浏览量: 179
- PDF下载量: 99
- 被引次数: 0
图(11) / 表(2)




