

A Real-time Motion Planning Algorithm for AUV based on IDVD Method
-
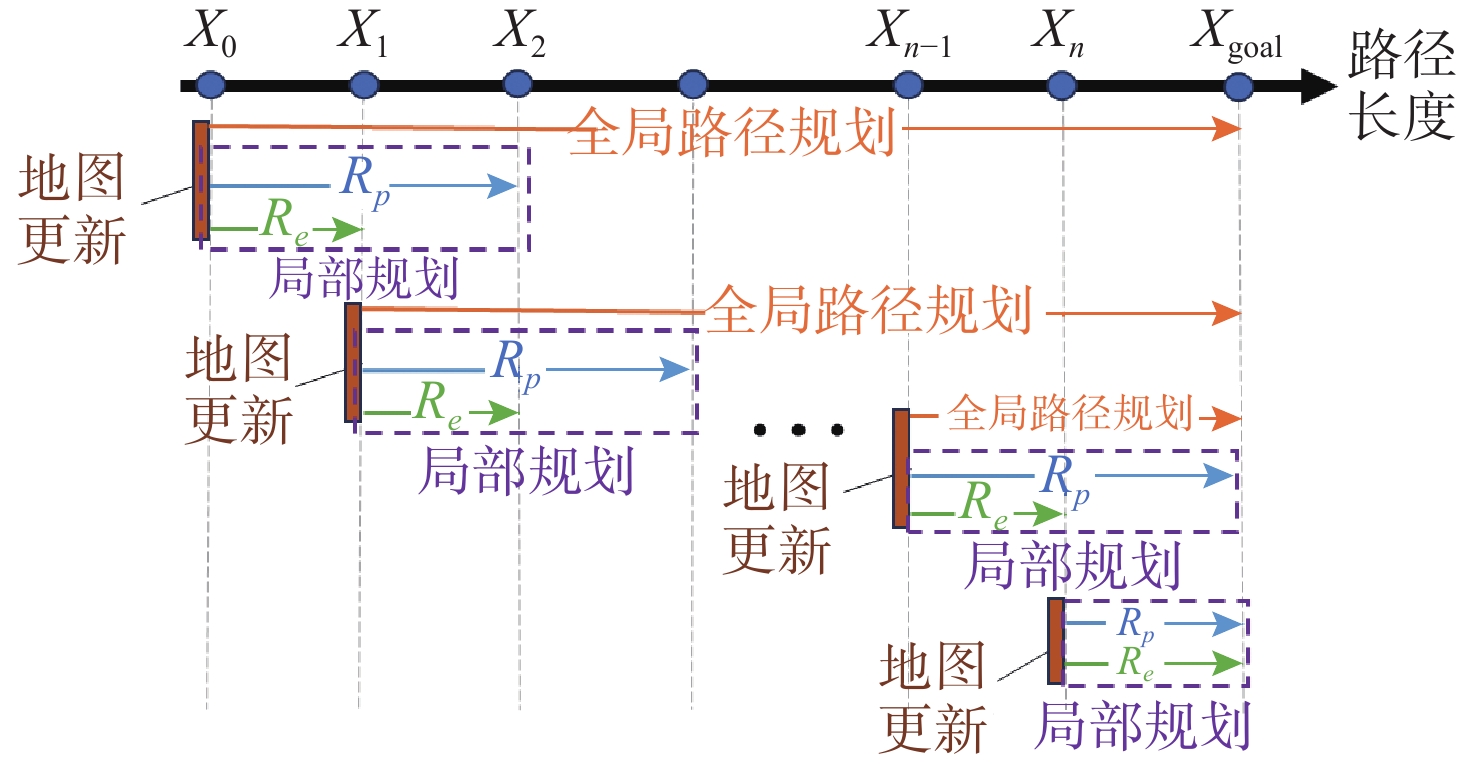
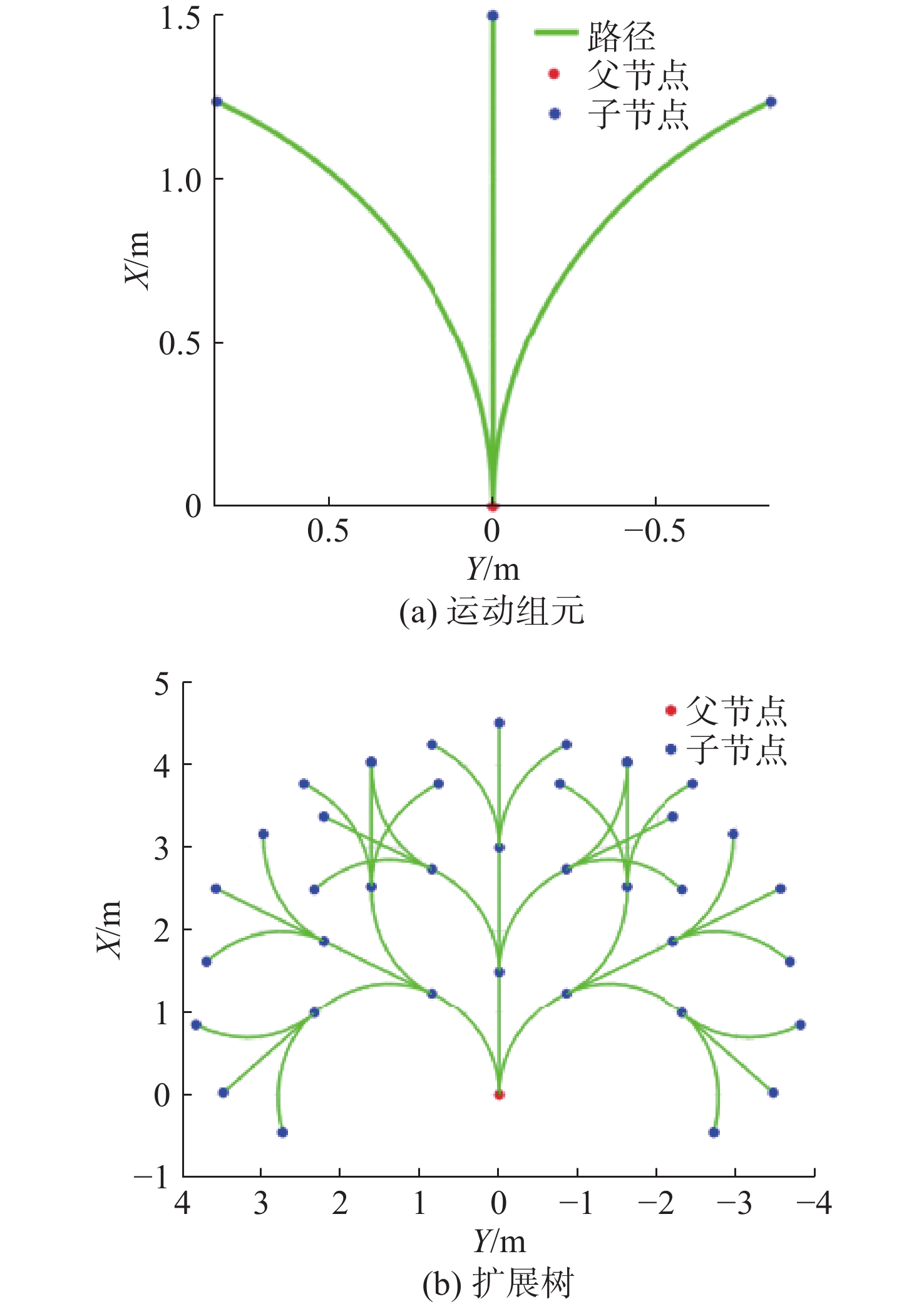
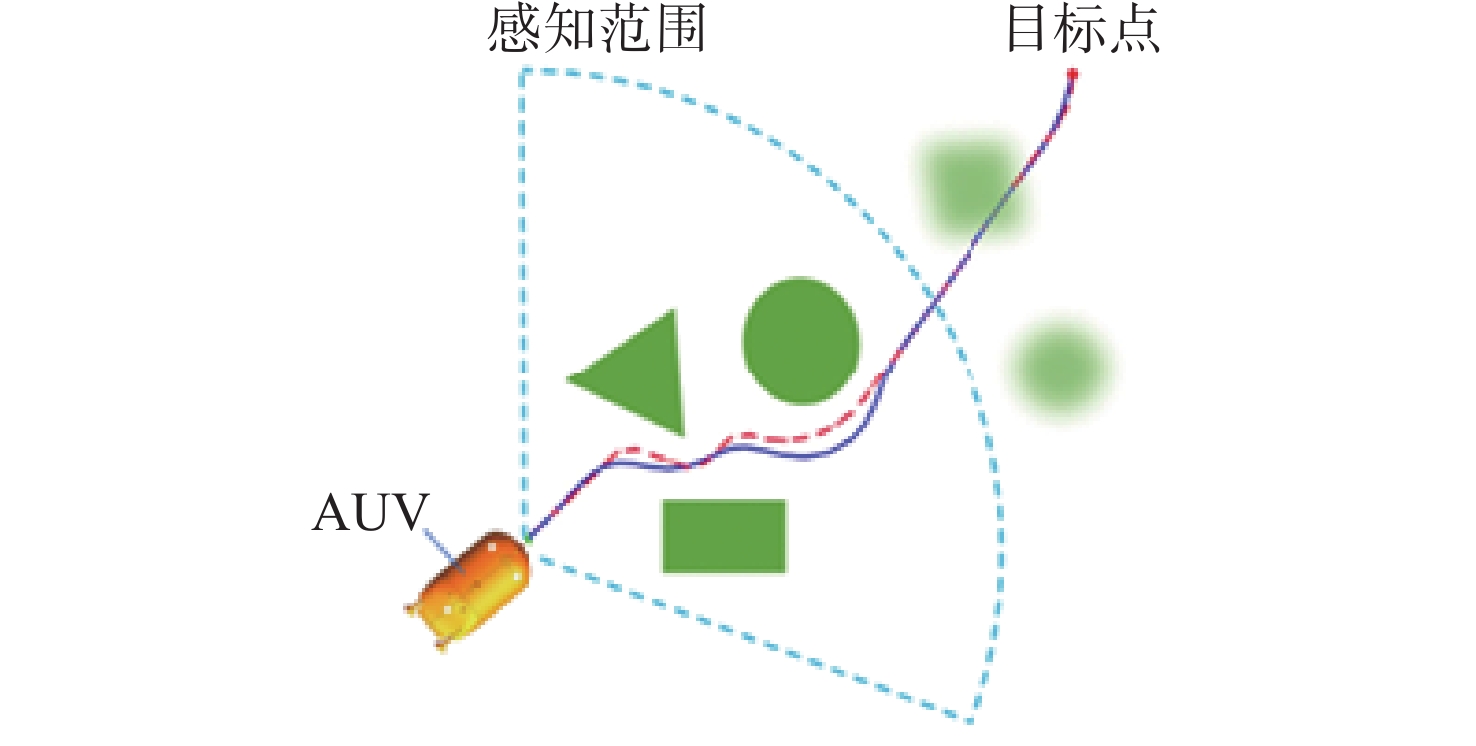
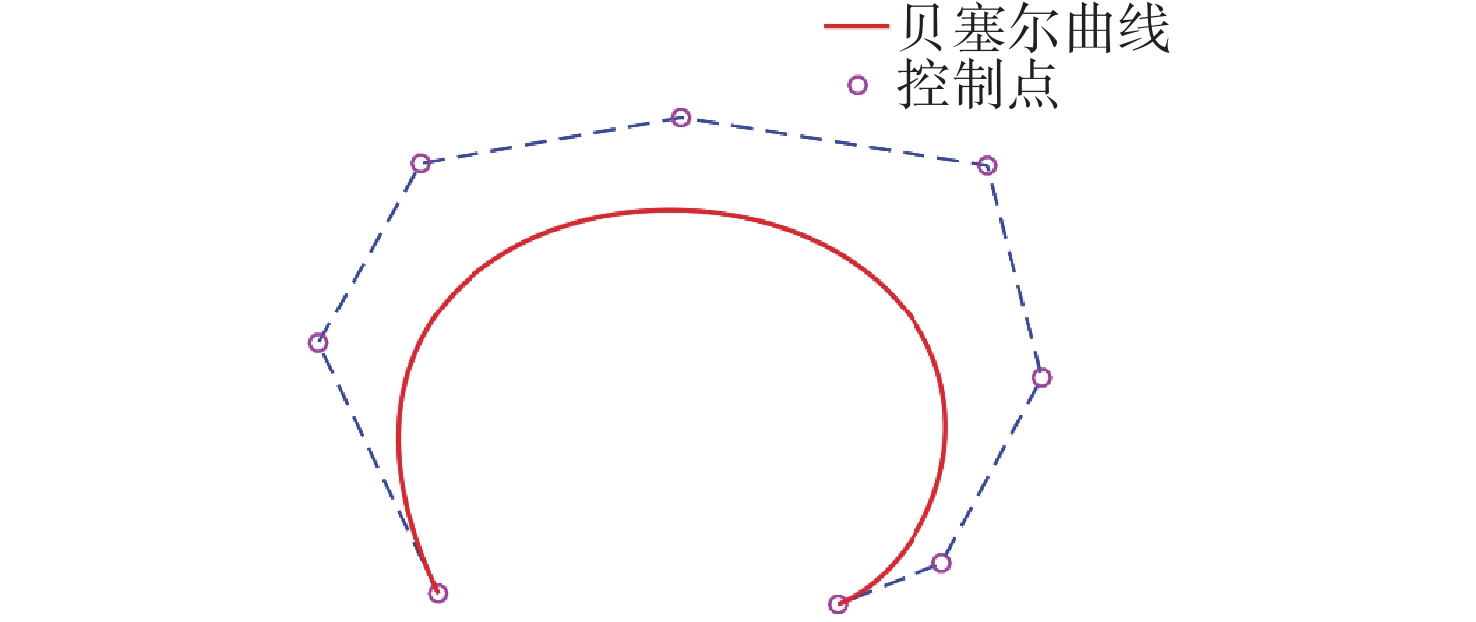
摘要: 为了提升自主水下航行器(AUV)的智能化程度, 文中提出一种基于逆动力学虚拟域(IDVD)方法的实时运动规划算法, 确保其在未知障碍物环境中安全航行。考虑到AUV自身计算资源有限, 为保证较高的计算效率并实现实时规划,算法采用分层结构框架:首先通过路径规划算法搜索全局安全路径, 然后在前视声呐的感知范围内进行路径优化, 生成安全可行的轨迹,针对欠驱动AUV的运动学约束, 全局路径搜索采用混合A*算法来寻找安全路径,并构建非线性优化问题以提高路径的平滑性和安全性;利用IDVD方法获得可行的AUV速度和加速度轨迹, 并作为参考输入引导AUV航行。为了验证所提出的运动规划方法, 对“海魟二号”AUV进行了仿真和实验,结果表明文中方法能够在未知复杂环境中为AUV实现高效的在线轨迹规划。Abstract: To enhance the intelligence of autonomous undersea vehicles(AUVs), this paper proposed a real-time motion planning algorithm based on the inverse dynamic virtual domain(IDVD) method, ensuring safe navigation in unknown environments with obstacles. In view of the limited computational resources of AUVs, a hierarchical framework was adopted to guarantee high computational efficiency for real-time planning. First, a safe global path was generated using a path planning algorithm, followed by path optimization within the sensing range of the forward-looking sonar to produce safe and feasible trajectories. Specially, for the kinematic constraints of underactuated AUVs, the hybrid A* algorithm was employed for searching safe paths based on global path search. Subsequently, a nonlinear optimization problem was formulated to enhance path smoothness and safety. The IDVD method was then applied to derive feasible velocity and acceleration trajectories of AUVs, which served as reference inputs to guide the AUVs’ navigation. Simulations and experiments on the “Stingray-II” AUV were conducted. The results validate that the proposed method is capable of efficient online trajectory planning for AUVs in unknown complex environments.
-
表 1 不同方法计算性能对比
Table 1. Computational performance comparison with different methods
方法 航行时间/s 平均计算时间/s Matlab C++ 文中方法 140.6 1.23 0.017 CT 153.2 1.18 0.020 GPM 134.9 72.38 6.320  下载: 导出CSV
下载: 导出CSV
表 2 规划周期内的计算时间
Table 2. Calculation time in planning cycle
ms 轨迹 最小时间 最大时间 平均时间 S型 24 47 37 8字型 22 45 36
下载: 导出CSV
-
[1] GONG Y J, HUANG T, MA Y N, et al. MTrajPlanner: A multiple-trajectory planning algorithm for autonomous underwater vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(4): 3714-3727. doi: 10.1109/TITS.2023.3234937 [2] ZENG Z, SAMMUT K, LAMMAS A, et al. Efficient path re-planning for AUV operating in spatiotemporal currents[J]. Journal of Intelligent and Robotic Systems: Theory and Applications, 2015, 79(1): 135-153. [3] WILLNERS J S, GONZALEZ-ADELL D, HERNÁNDEZ J D, et al. Online 3-dimensional path planning with kinematic constraints in unknown environments using hybrid A* with tree pruning[J]. Sensors, 2021, 21(4): 1-20. doi: 10.1109/JSEN.2021.3049752 [4] HERNÁNDEZ J D, VIDAL E, VALLICROSA G, et al. Online path planning for autonomous underwater vehicles in unknown environments[C]//2015 IEEE International Conference on Robotics and Automation. Seattle, USA: IEEE, 2015: 1152-1157. [5] YAKIMENKO O A. Direct method for rapid prototyping of near-optimal aircraft trajectories[J]. Journal of Guidance, Control, and Dynamics, 2000, 23(5): 865-875. doi: 10.2514/2.4616 [6] ZHOU B, GAO F, WANG L, et al. Robust and efficient quadrotor trajectory generation for fast autonomous flight[J]. IEEE Robotics and Automation Letters, 2019, 4(4): 3529-3536. doi: 10.1109/LRA.2019.2927938 [7] LIU S, WATTERSON M, MOHTA K, et al. Planning dynamically feasible trajectories for quadrotors using safe flight corridors in 3-D complex environments[J]. IEEE Robotics and Automation Letters, 2017, 2(3): 1688-1695. doi: 10.1109/LRA.2017.2663526 [8] MA D, HAO S, MA W, et al. An optimal control-based path planning method for unmanned surface vehicles in complex environments[J]. Ocean Engineering, 2022, 245: 110532. doi: 10.1016/j.oceaneng.2022.110532 [9] ZHUANG Y, SHARMA S, SUBUDHI B, et al. Efficient collision-free path planning for autonomous underwater vehicles in dynamic environments with a hybrid optimization algorithm[J]. Ocean Engineering, 2016, 127: 190-199. doi: 10.1016/j.oceaneng.2016.09.040 [10] MAHMOUD ZADEH S, POWERS D M W, SAMMUT K, et al. A novel versatile architecture for autonomous underwater vehicle’s motion planning and task assignment[J]. Soft Computing, 2018, 22(5): 1687-1710. doi: 10.1007/s00500-016-2433-2 [11] RICHTER C, BRY A, ROY N. Polynomial trajectory planning for aggressive quadrotor flight in dense indoor environments[J]. Springer Tracts in Advanced Robotics, 2016, 114: 649-666. [12] KARAMAN S, FRAZZOLI E. Incremental sampling-based algorithms for optimal motion planning[J]. Robotics Science and Systems, 2010, 104(2): 267-274. [13] HERNÁNDEZ J D, MOLL M, VIDAL E, et al. Planning feasible and safe paths online for autonomous underwater vehicles in unknown environments[C]//2016 IEEE International Conference on Intelligent Robots and Systems. Daejeon, Korea(South): IEEE, 2016: 1313-1320. [14] CARRERAS M, HERNANDEZ J D, VIDAL E, et al. Sparus II AUV-A hovering vehicle for seabed inspection[J]. IEEE Journal of Oceanic Engineering, 2018, 43(2): 344-355. doi: 10.1109/JOE.2018.2792278 [15] USENKO V, VON STUMBERG L, PANGERCIC A, et al. Real-time trajectory replanning for MAVs using uniform B-splines and a 3D circular buffer[C]//2017 IEEE International Conference on Intelligent Robots and Systems. Vancouver, BC, Canada: IEEE, 2017: 215-222. [16] OLEYNIKOVA H, BURRI M, TAYLOR Z, et al. Continuous-time trajectory optimization for online UAV replanning[C]//2016 IEEE International Conference on Intelligent Robots and Systems. Daejeon, Korea(South): IEEE, 2016: 5332-5339. [17] ZHOU X, WANG Z, YE H, et al. EGO-Planner: An ESDF-free gradient-based local planner for quadrotors[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 478-485. doi: 10.1109/LRA.2020.3047728 [18] YE H, ZHOU X, WANG Z, et al. TGK-planner: An efficient topology guided kinodynamic planner for autonomous quadrotors[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 494-501. doi: 10.1109/LRA.2020.3047798 [19] SHKEL A M, LUMELSKY V. Classification of the Dubins set[J]. Robotics and Autonomous Systems, 2001, 34(4): 179-202. doi: 10.1016/S0921-8890(00)00127-5 [20] ZHU Z, SCHMERLING E, PAVONE M. A convex optimization approach to smooth trajectories for motion planning with car-like robots[C]// 2015 Proceedings of the IEEE Conference on Decision and Control. Osaka, Japan: IEEE, 2015: 835-842. [21] BOYARKO G, YAKIMENKO O, ROMANO M. Real-Time 6DoF guidance for of spacecraft proximity maneuvering and close approach with a tumbling object[C]//2010 AIAA/AAS Astrodynamics Specialist Conference. Toronto, Ontario, Canada: AIAA, 2010: 7666. [22] YAZDANI A M, SAMMUT K, YAKIMENKO O A, et al. IDVD-based trajectory generator for autonomous underwater docking operations[J]. Robotics and Autonomous Systems, 2017, 92: 12-29. doi: 10.1016/j.robot.2017.02.001 [23] COWLING I D, YAKIMENKO O A, WHIDBORNE J F, et al. Direct method based control system for an autonomous quadrotor[J]. Journal of Intelligent and Robotic Systems: Theory and Applications, 2010, 60(2): 285-316. [24] ALTURBEH H, WHIDBORNE J F. Real-time obstacle collision avoidance for fixed wing aircraft using B-splines[C]//2014 UKACC International Conference on Control. Loughborough, UK: IEEE, 2014: 115-120. [25] HEAD J D, ZERNER M C. A Broyden-Fletcher-Goldfarb-Shanno optimization procedure for molecular geometries[J]. Chemical Physics Letters, 1985, 122(3): 264-270. doi: 10.1016/0009-2614(85)80574-1 [26] ANDERSSON J A E, GILLIS J, HORN G, et al. CasADi: A software framework for nonlinear optimization and optimal control[J]. Mathematical Programming Computation, 2019, 11(1): 1-36. doi: 10.1007/s12532-018-0139-4 [27] GAN W, SU L, CHU Z. Trajectory planning of autonomous underwater vehicles based on Gauss pseudospectral method[J]. Sensors, 2023, 23(4): 57-71. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 1107
- HTML全文浏览量: 131
- PDF下载量: 74
- 被引次数: 0

图(15) / 表(2)




