System Effectiveness Evaluation of Acoustic Glider Based on Optimized ADC Model
-
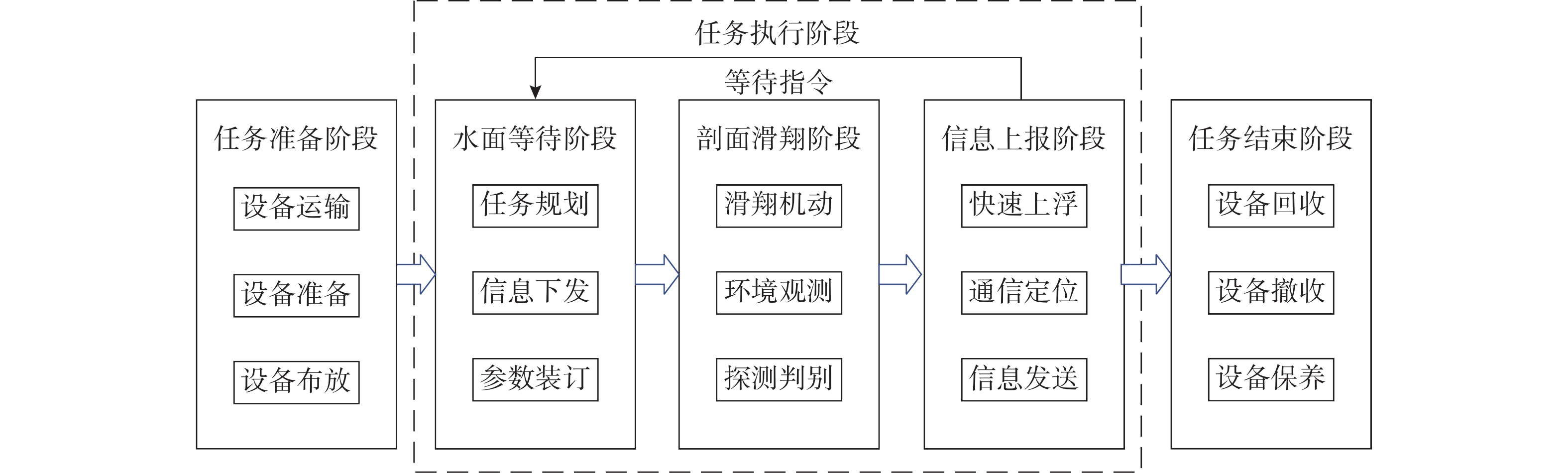
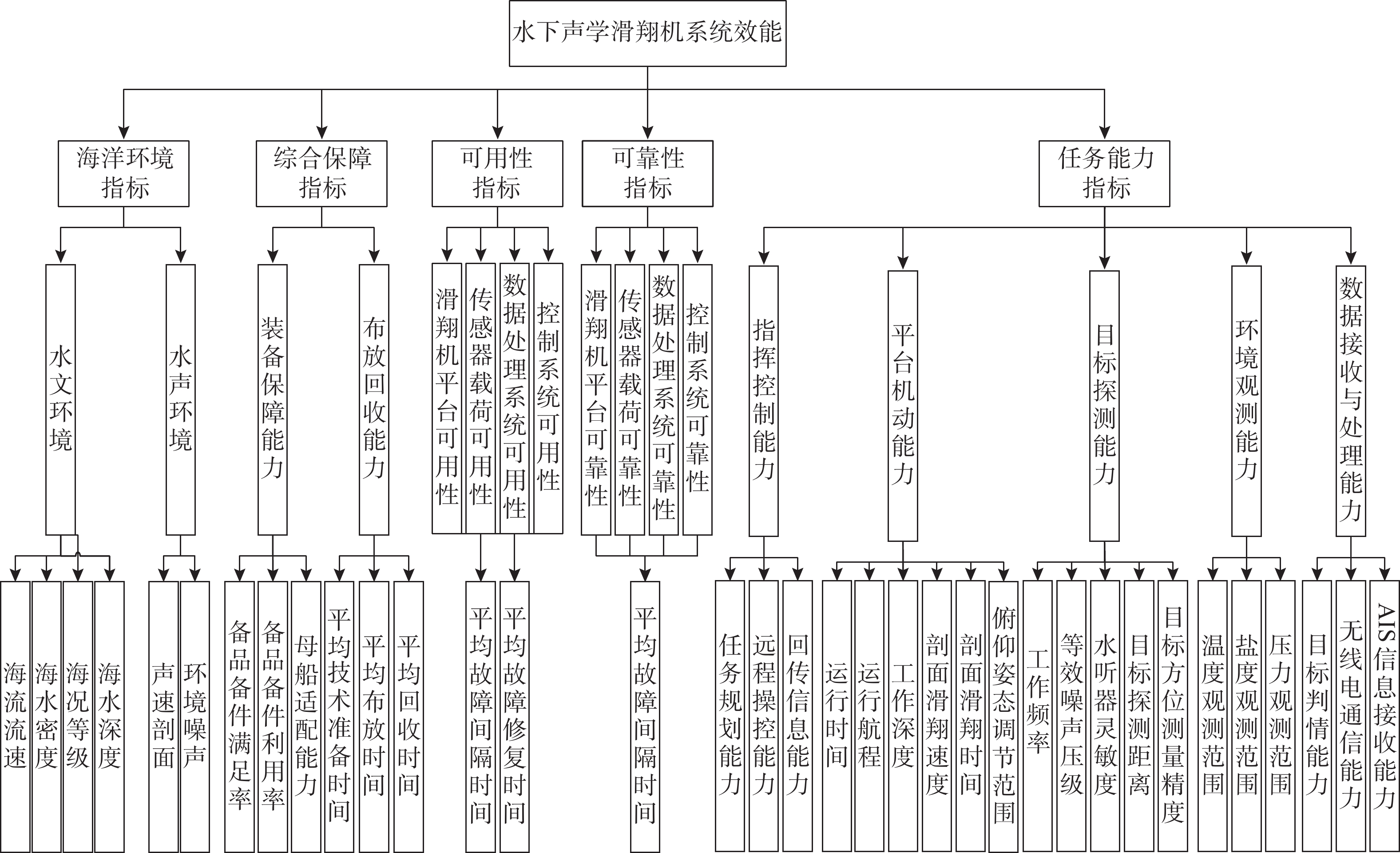
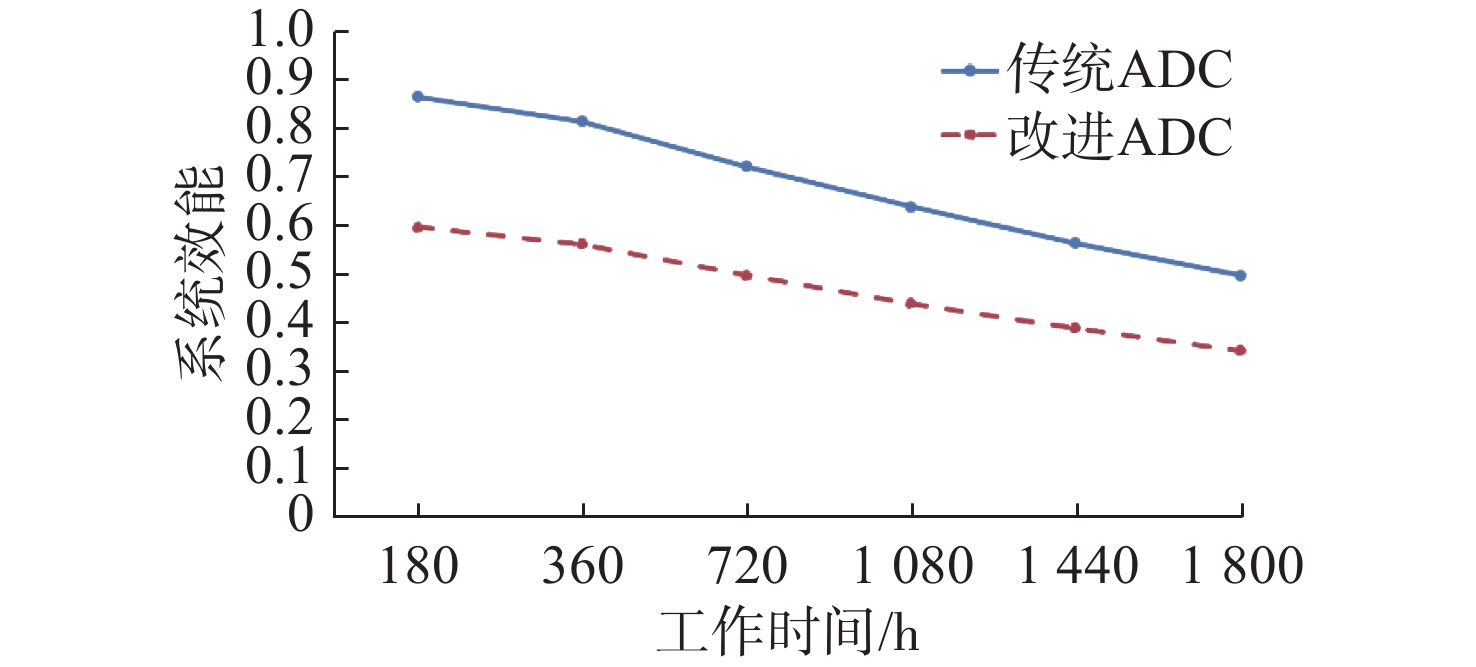
摘要: 随着水下无人技术的发展, 声学滑翔机日趋成为海洋环境观测和水下目标探测的优势平台, 对其进行系统效能评估也成为关注重点之一。文中基于声学滑翔机系统的任务过程特点和影响因素, 构建了声学滑翔机系统效能评估指标体系; 考虑海洋环境和综合保障等因素对声学滑翔机的影响, 对传统可用性-可信性-固有能力(ADC)模型进行了优化改进; 利用层次分析法(AHP)确定了声学滑翔机系统效能三级指标权重, 并通过算例验证了该模型的可行性, 使得评估结果更加符合实际, 为后续海上无人装备效能评估提供方法参考。Abstract: With the development of unmanned underwater technology, acoustic gliders are increasingly becoming advantageous platforms for marine environment observation and underwater target detection. Evaluating their system effectiveness has thus become a key focus. Based on the characteristics and influencing factors of the mission process, an effectiveness evaluation index system for acoustic glider systems was constructed. The traditional availability-dependability-capability(ADC) model was optimized by considering the effects of the marine environment and comprehensive support on acoustic gliders. The analytic hierarchy process(AHP) was used to determine the weights of the three-level indices. The feasibility of the model was verified by numerical examples, showing that the optimized ADC model produced more realistic evaluation results and provided a methodological reference for the effectiveness evaluation of unmanned maritime equipment.
-
Key words:
- acoustic glider /
- ADC model /
- effectiveness evaluation /
- index system
-
表 1 声学滑翔机初始工作状态分类
Table 1. Classification of initial working states of acoustic glider
状态
标号工作状态 代表符号 系统工作状态 状态
数量$ {a}_{1} $ 5个子系
统正常$ {S}_{ 1}{S}_{ 2}{S}_{ 3}{S}_{ 4}{S}_{ 5} $ 系统正常 1 $ {a}_{2} $ S2故障 $ {S}_{ 1}\overline{{S}_{ 2}}{S}_{ 3}{S}_{ 4}{S}_{ 5} $ 探测受限使用 1 $ {a}_{3} $ S3故障 $ {S}_{ 1}{S}_{ 2}\overline{{S}_{ 3}}{S}_{ 4}{S}_{ 5} $ 观测受限使用 1 $ {a}_{4} $ S2、S3故障 $ {S}_{ 1}\overline{{S}_{ 2}}\overline{{S}_{ 3}}{S}_{ 4}{S}_{ 5} $ 严重故障 1 $ {a}_{5} $ S1、S4
或S5故障$ \begin{array}{*{20}{c}} {\overline {{S_{ 1}}} {S_{ 2}}{S_{ 3}}{S_{ 4}}{S_{ 5}}} \\ {{S_{ 1}}{S_{ 2}}{S_{ 3}}\overline {{S_{ 4}}} {S_{ 5}}} \\ \cdots \\ {\overline {{S_{ 1}}{S_{ 2}}{S_{ 3}}{S_{ 4}}} \overline {{S_{ 5}}} } \end{array} $ 系统失效 28  下载: 导出CSV
下载: 导出CSV
表 2 各子系统平均故障间隔时间和平均故障修复时间
Table 2. MTBF and MTTR of each subsystem
h 性能指标 S1 S2 S3 S4 S5 MTBF 12000 8760 7200 8760 9600 MTTR 2 1 1 2 2
下载: 导出CSV
表 3 指挥控制能力判断矩阵
Table 3. Judgment matrix of command and control performance
任务规划能力 远程操控能力 回传信息能力 任务规划能力 1 5 7 远程操控能力 1/5 1 3 回传信息能力 1/7 1/3 1
下载: 导出CSV
表 4 指挥控制能力指标归一化处理
Table 4. Normalization of command and control performance indicators
指标 系统
正常探测受限
使用观测受限
使用严重
故障系统
失效任务规划 1.0 0.8 0.8 0.8 0 远程操控 1.0 0.8 0.8 0.8 0 回传信息 0.8 0.6 0.8 0.6 0
下载: 导出CSV
表 5 平台固有能力判断矩阵
Table 5. Judgment matrix of platform basic performance
运行
时间运行
航程工作
深度剖面滑翔
速度剖面滑翔
时间俯仰姿态
调节范围运行时间 1 2 3 5 6 7 运行航程 1/2 1 2 3 3 5 工作深度 1/3 1/2 1 3 4 5 剖面滑翔
速度1/5 1/3 1/3 1 3 4 剖面滑翔
时间1/6 1/3 1/4 1/3 1 3 俯仰姿态
调节范围1/7 1/5 1/5 1/4 1/3 1
下载: 导出CSV
表 6 平台固有能力指标归一化处理
Table 6. Normalization of platform basic performance indicators
指标 系统
正常探测受限
使用观测受限
使用严重
故障系统
失效运行时间 1.0 1.0 1.0 1.0 0.0 运行航程 1.0 1.0 1.0 1.0 0.0 工作深度 1.0 1.0 1.0 1.0 0.0 剖面滑翔速度 0.8 0.8 0.8 0.8 0.0 剖面滑翔时间 0.8 0.8 0.8 0.8 0.0 俯仰姿态调节范围 1.0 1.0 1.0 1.0 0.0
下载: 导出CSV
表 7 目标探测能力判断矩阵
Table 7. Judgment matrix of target detection performance
工作
频率等效噪
声压级水听器
灵敏度目标探
测距离目标方位
测量精度工作频率 1 1/3 5 1/5 3 等效噪声压级 3 1 5 1/5 3 水听器灵敏度 1/5 1/5 1 1/7 1/3 目标探测距离 5 3 7 1 6 目标方位测量精度 1/3 1/3 3 1/6 1
下载: 导出CSV
表 8 目标探测能力指标归一化处理
Table 8. Normalization of target detection performance indicators
指标 系统
正常探测受限
使用观测受限
使用严重
故障系统
失效工作频率 1.0 1.0 1.0 0 0 等效噪声压级 1.0 0.8 1.0 0 0 水听器灵敏度 1.0 1.0 1.0 0 0 目标探测距离 0.8 0.6 0.8 0 0 目标方位测量精度 1.0 0.8 1.0 0 0
下载: 导出CSV
表 9 环境观测能力判断矩阵
Table 9. Judgment matrix of environmental observation performance
指 标 温度测量范围 盐度测量范围 压力测量范围 温度测量范围 1 3 5 盐度测量范围 1/3 1 3 压力测量范围 1/5 1/3 1
下载: 导出CSV
表 10 环境观测能力指标归一化处理
Table 10. Normalization of environmental observation performance indicators
指 标 系统
正常探测受限
使用观测受限
使用严重
故障系统
失效温度测量范围 0.8 0.8 0.6 0 0 盐度测量范围 1.0 1.0 0.8 0 0 压力测量范围 1.0 1.0 0.6 0 0
下载: 导出CSV
表 11 数据接收与处理能力判断矩阵
Table 11. Judgment matrix of data receiving and processing performance
指 标 目标判情
能力无线电
通信能力AIS信息
接收能力目标判情能力 1 5 3 无线电通信能力 1/5 1 1/3 AIS信息接收能力 1/3 3 1
下载: 导出CSV
表 12 数据接收与处理能力指标归一化处理
Table 12. Normalization of data receiving and processing performance indicators
指 标 系统
正常探测受限
使用观测受限
使用严重
故障系统
失效目标判情能力 1.0 0.6 1.0 0 0 无线电通信能力 0.6 0.6 0.6 0.6 0 AIS信息接收能力 0.8 0.8 0.8 0.8 0
下载: 导出CSV
表 13 任务能力判断矩阵
Table 13. Judgment matrix of task performance
指挥控
制能力平台机
动能力目标探
测能力环境观
测能力数据接收
处理能力指挥控制能力 1 3 1/3 5 1/2 平台机动能力 1/3 1 1/5 3 1/3 目标探测能力 3 5 1 7 2 环境观测能力 1/5 1/3 1/7 1 1/6 数据接收与处理能力 2 3 1/2 6 1
下载: 导出CSV
-
[1] 孙大军, 吕云飞, 师俊杰, 等. 声学滑翔机技术现状及发展趋势[J]. 数字海洋与水下攻防, 2023, 6(2): 133-144.SUN D J, LÜ Y F, SHI J J, et al. Discussion on present situation and future trend of acoustic glider technology[J]. Digital Ocean & Underwater Warfare, 2023, 6(2): 133-144. [2] 孙芹东, 兰世泉, 王超, 等. 水下声学滑翔机研究进展及关键技术[J]. 水下无人系统学报, 2020, 28(1): 10-17.SUN Q D, LAN S Q, WANG C, et al. Key technologies of underwater acoustic glider: A review[J]. Journal of Unmanned Undersea Systems, 2020, 28(1): 10-17. [3] 杨绍琼, 李元昊, 孙通帅, 等. “海燕”号谱系化水下滑翔机技术发展与应用[J]. 水下无人系统学报. 2023, 31(1): 68-85.YANG S Q, LI Y H, SUN T S, et al. Development and application of petrel serialized underwater glider technologies[J]. Journal of Unmanned Undersea Systems, 2023, 31(1): 68-85. [4] WANG H S, FENG W, XU W, et al. Measuring channel state information by underwater acoustic gliders[C]//2021 IEEE/ICIC International Conference on Communications in China(ICCC Workshops). Xiamen, China: IEEE, 2021. [5] NISHANT KUMAR B. US Navy seeks next generation LBS-G system[J]. IHS Jane's International Defence Review, 2021, 1(2): 2. [6] FURLONG M, MARLOW R, MUNAFO A, et al. OCEANIDS: Building next generation maritime autonomous systems[C]//International Ship Control Systems Symposium (ISCSS). Glasgow, UK: ISCSS, 2018: 23-24. [7] WYNN R, MILLER P I, GOULT S, et al. Marine autonomous systems in support of marine observations: Final report on the MASSMO4 mission[R]. Norwich: University of East Anglia, 2018. [8] SUN J, WANG J, SHI Y, et al. Self-noise spectrum analysis and joint noise filtering for the sea-wing underwater glider based on experimental data[J]. IEEE Access, 2020, 8: 42960-42970. doi: 10.1109/ACCESS.2020.2977176 [9] LIPPSETT L .Ocean Observatories Initiative[J]. Oceanus, 2017, 53(1): 32-33. [10] 王超, 孙芹东, 王文龙, 等. 水下目标警戒滑翔机声学系统设计与实现[J]. 声学技术, 2018, 37(5): 84-87WANG C, SUN Q D, WANG W L, et al. Acoustic sytem design and implementation for underwater target warning glider[J]. Technical Acoustics, 2018, 37(5): 84-87. [11] 王超, 孙芹东, 兰世全, 等. 水下声学滑翔机目标探测性能南海试验分析[J]. 声学技术, 2018, 37(6): 149-150WANG C, SUN Q D, LAN S Q, et al. Underwater acoutic glider target detection performance trial analysis in the South China Sea[J]. Technical Acoustics, 2018, 37(6): 149-150 [12] 何胜杰, 郭强, 王兴虎, 等. 基于ADC分析法优化的无人机效能评估方法[J]. 无人系统技术, 2022, 5(2): 105-116.HE S J, GUO Q, WANG X H, et al. UAV performance evaluation optimized based on ADC analysis method[J]. Unmanned System Technology, 2022, 5(2): 105-116. [13] 常会振, 秦大国, 孙盛智, 等. 基于ADC模型优化的海上无人机作战效能评估[J]. 兵器装备工程学报, 2023, 44(9): 58-68. doi: 10.11809/bqzbgcxb2023.09.008CHANG H Z, QIN D G, SUN S Z, et al. Operational effectiveness evaluation of marine unmanned aerial vehicle based on ADC model optimization[J]. Journal of Ordance Equipment Engineering, 2023, 44(9): 58-68. doi: 10.11809/bqzbgcxb2023.09.008 [14] 齐智敏, 张海林, 伊山, 等. 智能无人机群体作战效能评估指标体系研究[J]. 舰船电子工程, 2021, 41(9): 1-5. doi: 10.3969/j.issn.1672-9730.2021.09.001QI Z M, ZHANG H L, YI S, et al. Research on the index system of intelligent UAV group combat effectiveness evaluation[J]. Ship Electronic Engineering, 2021, 41(9): 1-5. doi: 10.3969/j.issn.1672-9730.2021.09.001 [15] 杨秀竹. 水下滑翔机系统的效能评估研究[D]. 天津: 天津大学, 2022. [16] MURRAY N L. Weapon system effectiveness industry advisory committee. Task group I. Requirements methodology[R]. Virginia, USA: DTIC, 1965. [17] 刘登攀, 寇昆湖, 王超, 等. 基于改进ADC法的侦察无人机作战效能评估[J]. 电光与控制, 2024, 31(4): 121-127. doi: 10.3969/j.issn.1671-637X.2024.04.019LIU D P, KOU K H, WANG C, et al. Operational effectiveness assessment of reconnaissance UAS based on improved ADC method[J]. Electronics Optics & Control, 2024, 31(4): 121-127. doi: 10.3969/j.issn.1671-637X.2024.04.019 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 401
- HTML全文浏览量: 187
- PDF下载量: 68
- 被引次数: 0