

Short-Time Motion Analysis of Underwater High-Speed Moving Target Based on Pseudo-Linear Kalman Filter
-
摘要: 针对水下高速动目标探测过程中主动探测周期长、数据不连续, 被动探测无法获得目标距离且难以快速有效解算目标运动要素的问题, 提出了一种基于伪线性卡尔曼滤波(PLKF)的水下高速动目标短时运动分析方法。该方法仅在探测初始时使用一次主动探测, 是一种水平面内的以被动探测为主、主动探测为辅的被动目标运动分析(TMA)方法。文中建立了数学模型并给出迭代方程, 基于“目标在大部分观测时间内保持匀速运动”的先验假设, 在目标匀速运动条件下进行仿真分析, 使用Monte-Carlo方法计算了预测轨迹的均方根误差。仿真实验结果表明, 该方法相较于纯被动探测下的纯方位TMA方法误差更小, 且能够在短时间内实现对目标运动要素解算收敛, 收敛时间不大于10 s。Abstract: Detection of underwater high-speed moving targets faces challenges, such as long active detection cycles, discontinuous data, and passive detection failing to obtain target range, which makes it difficult to quickly and effectively calculate target motion parameters. To address these issues, a short-term motion analysis method for underwater high-speed moving targets based on a pseudo-linear Kalman filter(PLKF) was proposed. This method employed only one initial active detection at the beginning and was primarily a passive target motion analysis(TMA) method within the horizontal plane, supplemented minimally by active detection. Mathematical models were established, and iterative equations were provided. Based on the prior assumption that the target maintains constant-velocity motion for the majority of the observation time, simulation analysis was conducted under constant-velocity motion conditions. The root mean square error of the predicted trajectory was calculated using the Monte-Carlo method. Simulation results demonstrate that compared to bearing-only TMA using purely passive detection, this method enabled rapid convergence of the target motion parameter solution within a short time, with convergence achieved within no more than 10 seconds.
-
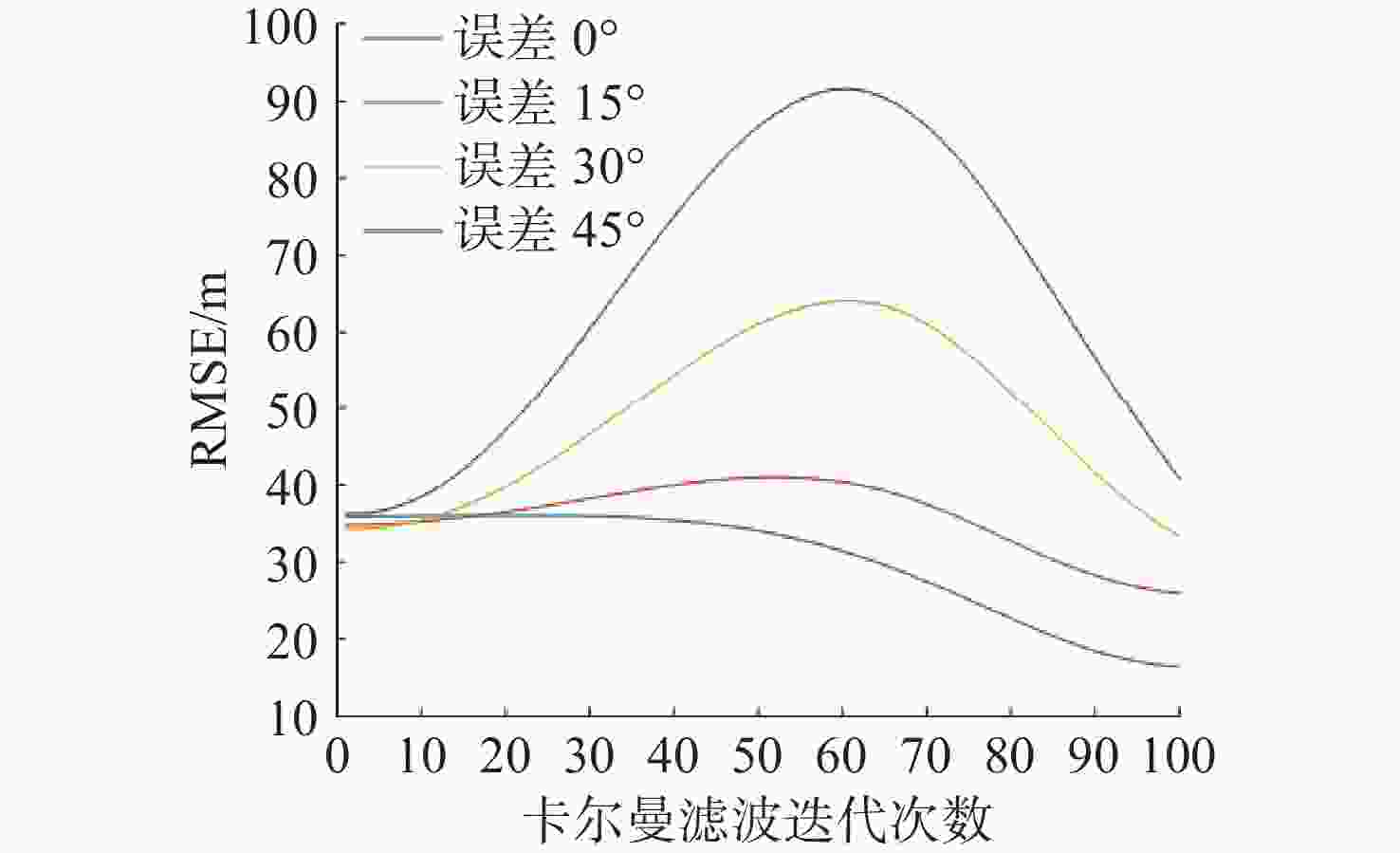
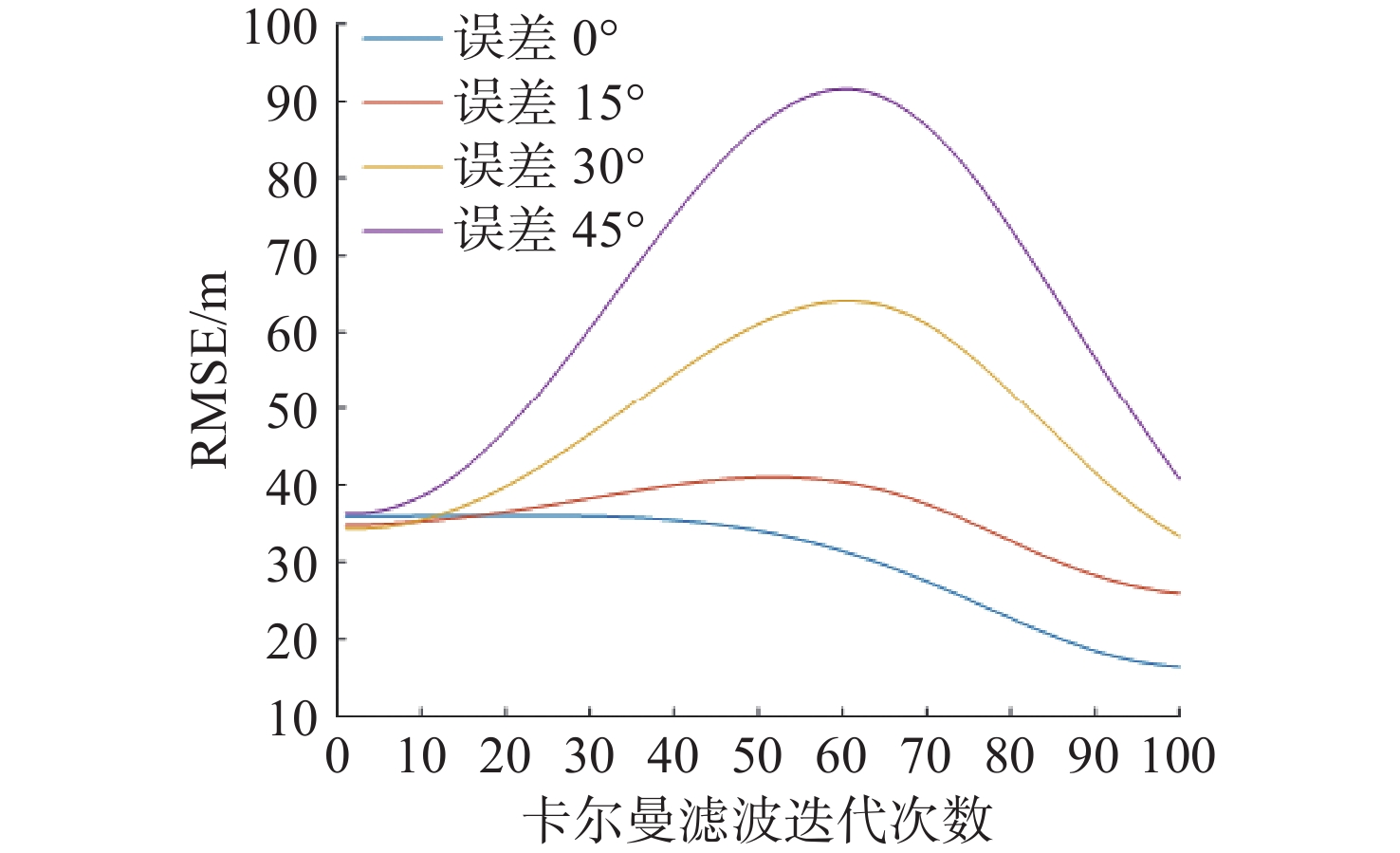
图 4 初始航向预测误差对收敛性的影响曲线
Figure 4. Curves of the initial heading prediction error's influence on convergence
表 1 仿真参数表
Table 1. Simulation parameters
参数 值 目标航速/(m/s) 25 观测站航速/(m/s) 25 目标初始位置/m (500, 600) 观测站初始位置/m (0, 0) 目标初始航向/(°) 135(正西南) 观测站初始航向中心/(°) −45(正东北) 观测站机动扇面角/(°) $ \pm {15}$ 观测站被动探测采样周期/s 0.1 单次仿真时间/s 10 距离观测误差/% 2.5 角度观测误差/(°) ${3}$ 速度大小估计误差/% $ \pm 10{\text{\ }}$  下载: 导出CSV
下载: 导出CSV
-
[1] 丁乐乐, 顾天军, 赵宇潇. 美无人潜航器军事应用与发展策略思考[J/OL]. 指挥控制与仿真, 2025: 1-5. (2025-06-11)[2025-07-29]. https://link.cnki.net/urlid/32.1759.TJ.20250610.2134.002.DING L L, GU T J, ZHAO Y X, Thoughts on the military applications and development strategies of US UUV[J/OL]. Command Control & Simulation, 2025: 1-5. (2025-06-11)[2025-07-29]. https://link.cnki.net/urlid/32.1759.TJ.20250610.2134.002. [2] 孙大军, 张艺翱, 滕婷婷, 等. 单站水下方位频率机动TMA方法[J]. 声学学报, 2024, 49(4): 683-695. doi: 10.12395/0371-0025.2023077SUN D J, ZHANG Y A, TENG T T, et al. A single-platform underwater maneuvering target motion analysis method based on bearing and frequency measurements[J]. Acta Acustica, 2024, 49(4): 683-695. doi: 10.12395/0371-0025.2023077 [3] 朱宣城. 基于粒子滤波的单站纯方位TMA[D]. 哈尔滨: 哈尔滨工程大学, 2023. [4] 郑艺, 王明洲. 一种滑动后向递推的EKF纯方位目标跟踪方法[J]. 水下无人系统学报, 2020, 28(6): 663-669.ZHENG Y, WANG M Z. Sliding backward recursive EKF bearings-only target tracking method[J]. Journal of Unmanned Undersea Systems, 2020, 28(6): 663-669. [5] 郑艺, 王明洲. 基于初值更新的水下纯方位短时目标跟踪[J]. 水下无人系统学报, 2021, 29(2): 189-195.ZHENG Y, WANG M Z. Underwater bearings-onlyshort time target tracking based on initial value updating[J]. Journal of Unmanned Undersea Systems, 2021, 29(2): 189-195. [6] ZHANG J Y, XU Z G. Bearings-only target motion analysis via instrumental variable estimation[J]. IEEE Transactions on Signal Processing: A Publication of the IEEE Signal Processing Society, 2010, 58(11): 5523-5533. [7] 欧阳林强. 基于纯方位目标跟踪的伪线性卡尔曼滤波算法研究[D]. 成都: 电子科技大学, 2023. [8] 董彦璐. 水声单站纯方位TMA技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2022. [9] MILLER A B, MILLER B M. Underwater target tracking using bearing-only measurements[J]. Journal of Communications Technology and Electronics, 2018, 63(6): 643-649. doi: 10.1134/S1064226918060207 [10] 郑艺, 王明洲, 胡友峰. 改进的中心差分卡尔曼滤波水下被动目标跟踪[J]. 舰船科学技术, 2021, 43(1): 154-160.ZHENG Y, WANG M Z, HU Y F. Improved central differential Kalman filter for underwater passive target tracking[J]. Ship Science and Technology, 2021, 43(1): 154-160. [11] BADRIASL L, ARULAMPALAM S, NGUYEN N, et al. An algebraic closed-form solution for bearings-only maneuvering target motion analysis from a nonmaneuvering platform[J]. IEEE Transactions on Signal Processing, 2020(99): 1-16. [12] WANG Y, ZHANG X, WANG J, et al. Underwater maneuvering target motion analysis using delayed azimuth angles[J]. Ocean Engineering, 2024, 311(P2): 118901. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 311
- HTML全文浏览量: 176
- PDF下载量: 69
- 被引次数: 0
图(4) / 表(1)




