

Extreme Learning-Based Robust Adaptive Path Tracking Control of Underactuated Unmanned Surface Vessel
-
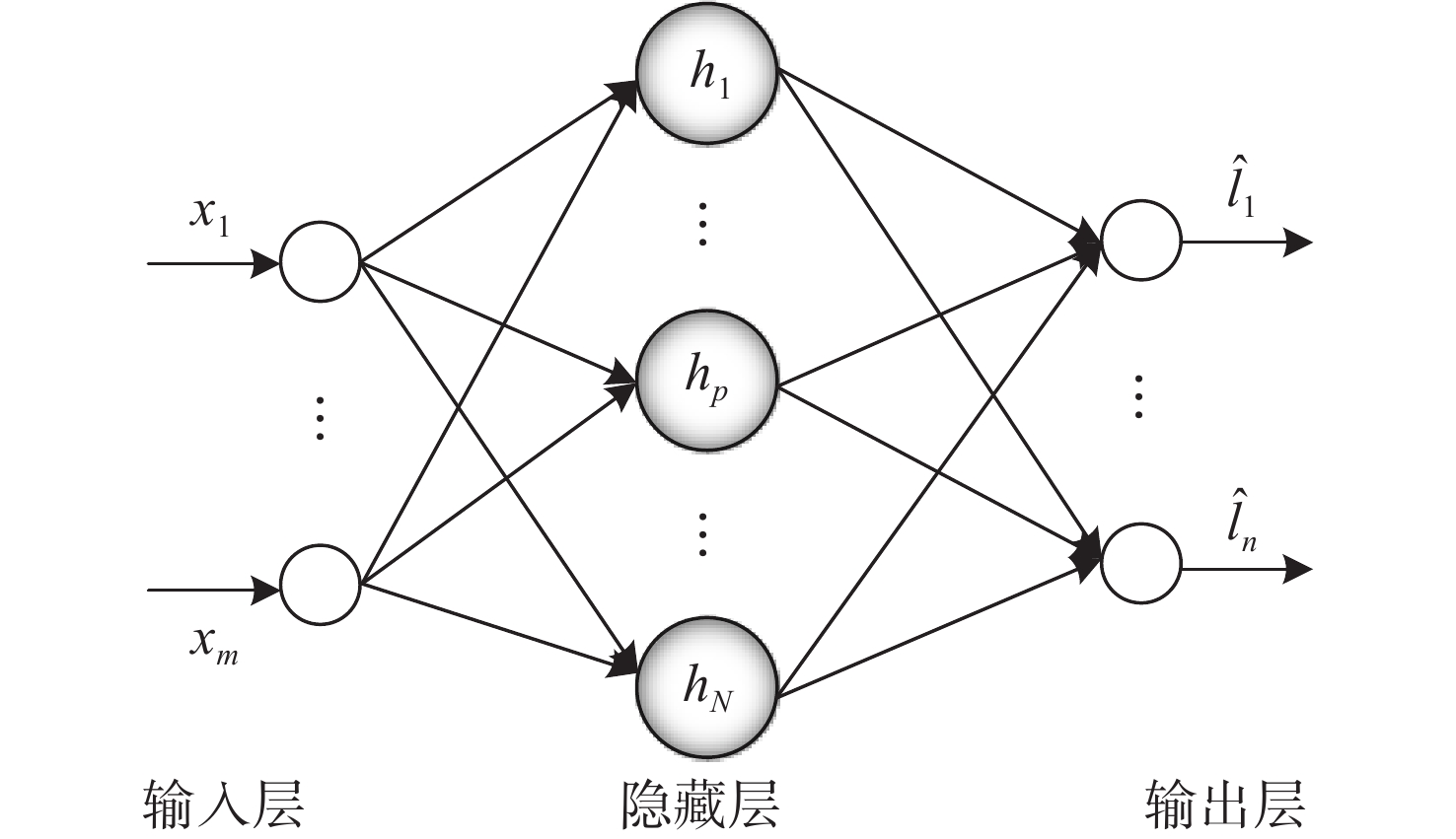
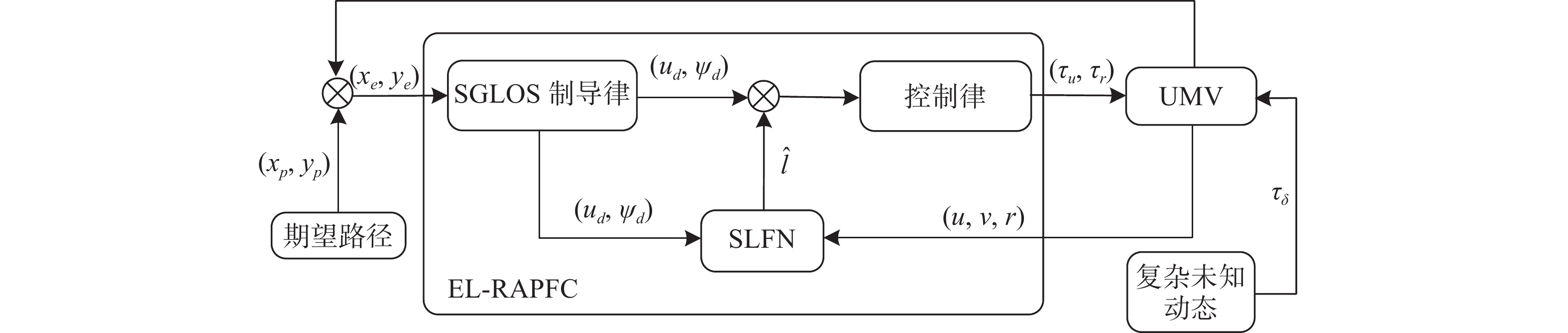
摘要: 针对欠驱动无人艇(USV)存在未建模动力学、参数不确定性和干扰等未知状况, 提出一种基于极速学习的鲁棒自适应路径跟踪控制方案。首先, 采用纵荡视线制导律, 同时制导纵荡速度与航向角, 避免制导过程的奇异现象, 使得USV快速收敛至期望路径; 其次, 将包含系统不确定性和外部干扰的未知动态封装成一个集总未知项, 利用极速学习机的单隐层前馈网络(SLFN)随机产生隐层节点, 在线辨识该未知项, 避免对USV先验知识的依赖和“维度爆炸”问题; 然后, 通过设计逼近残差自适应补偿器, 同时在线更新SLFN的输出权重和逼近残差, 形成双通道学习机制, 不仅可以增强逼近能力, 而且提高了跟踪精度; 最后, 设计自适应路径跟踪控制器, 使得USV的纵荡速度与航向角制导误差可以渐进收敛到原点附近的小邻域。仿真实验验证了所提方案的有效性和优越性。Abstract: An extreme learning-based robust adaptive path tracking control scheme was proposed for underactuated unmanned surface vessels(USVs) with unknown dynamics, parameter uncertainties, and disturbances. Firstly, the surge-guided line-of-sight guidance law was used to guide the surge speed and heading angle at the same time, so as to avoid the singularity of the guidance process and make the USV converge to the desired path quickly. Secondly, the unknown dynamics including system uncertainties and external disturbances were encapsulated into a lumped unknown term, and hidden layer nodes were randomly generated by the single-hidden layer feedforward network(SLFN) of the extreme learning machine to identify the unknown term and avoid relying on USV prior knowledge and dimension explosion problem. Then, by designing an adaptive compensator for the approximation residual, the output weight and the approximation residual of the SLFN were updated online at the same time to form a dual-channel learning mechanism, which can not only enhance the approximation ability but also improve the tracking accuracy. Finally, an adaptive path tracking controller was designed so that the surge velocity and heading angle guidance errors of USVs can gradually converge to a small neighborhood near the origin. Simulation studies verify the effectiveness and superiority of the proposed scheme.
-
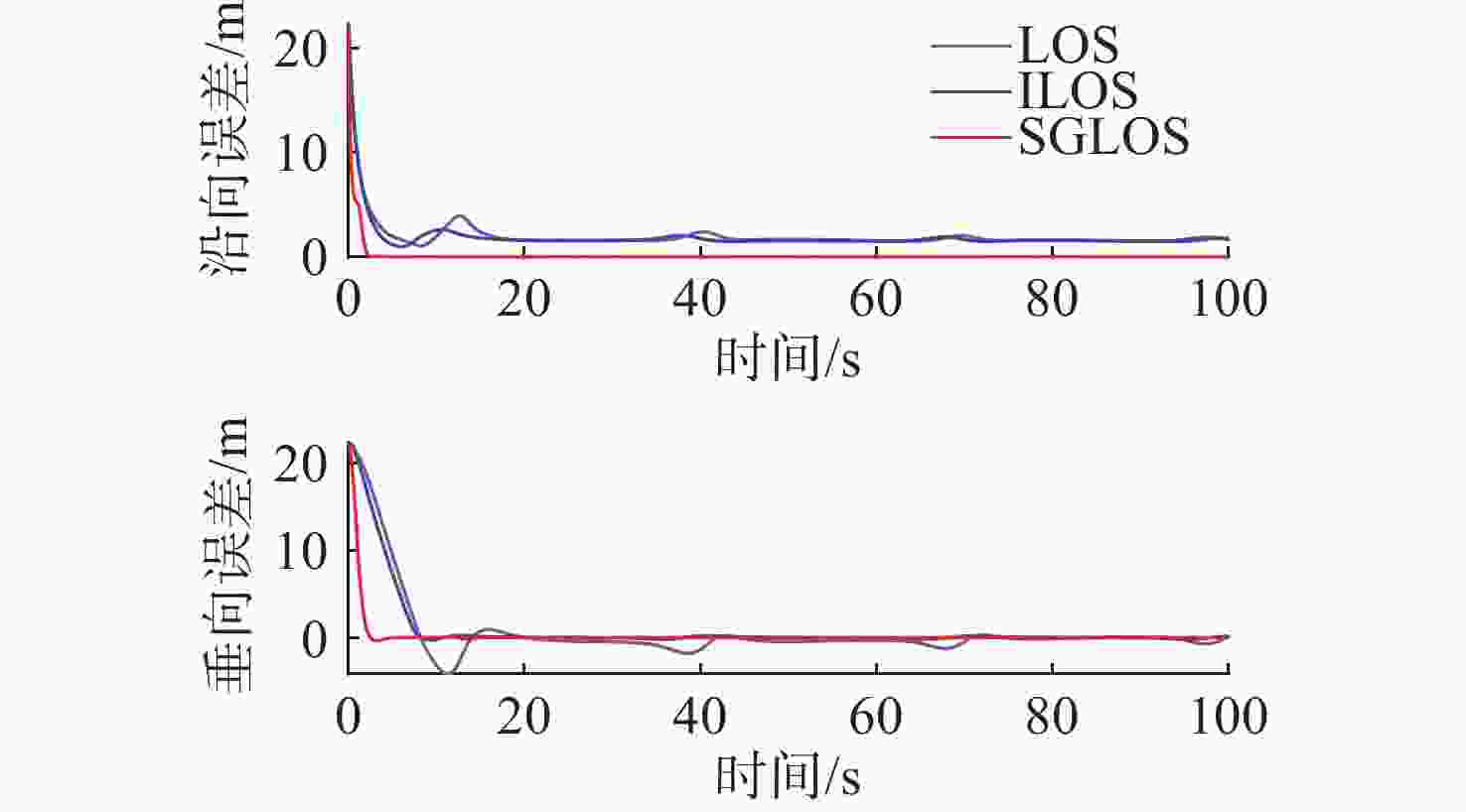
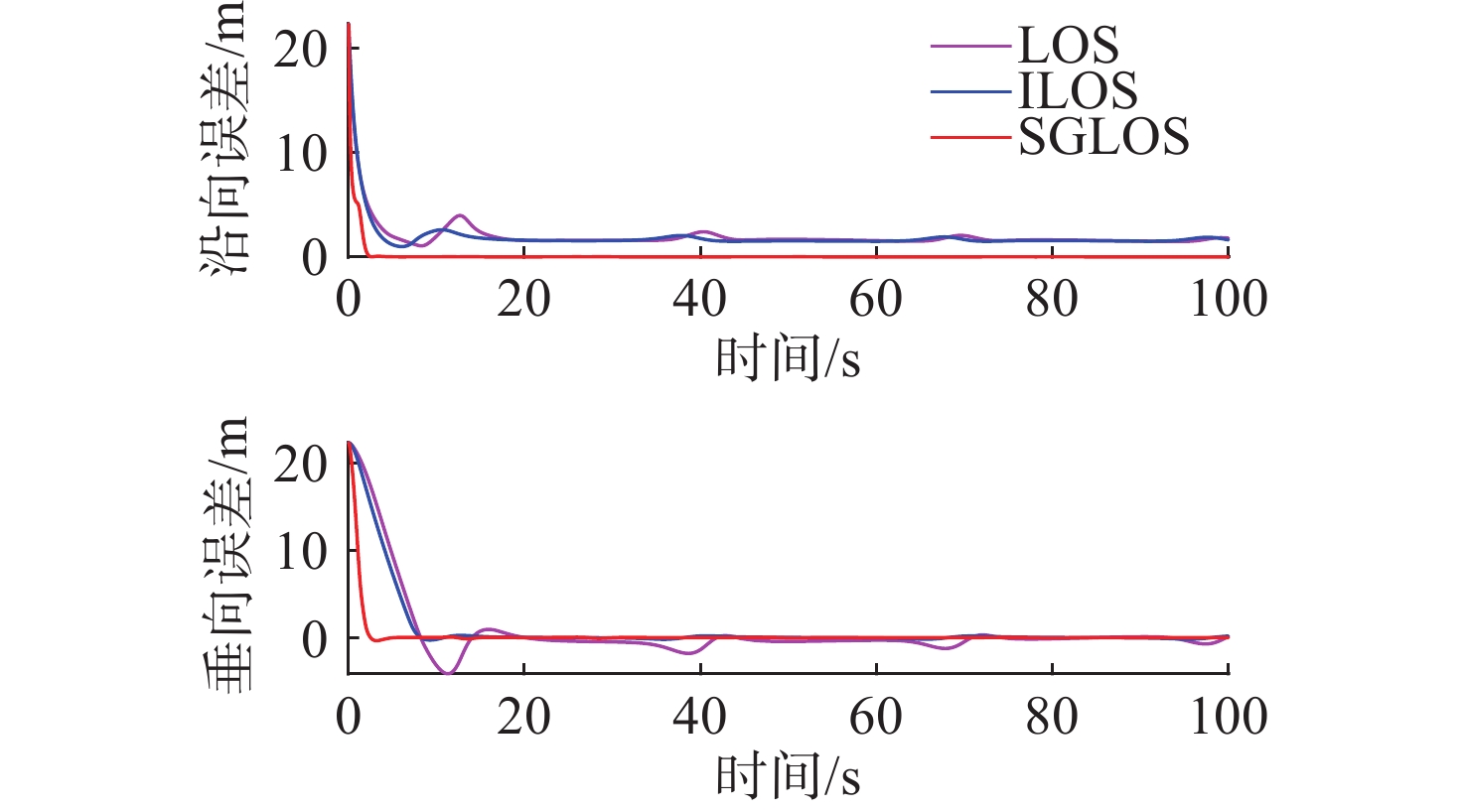
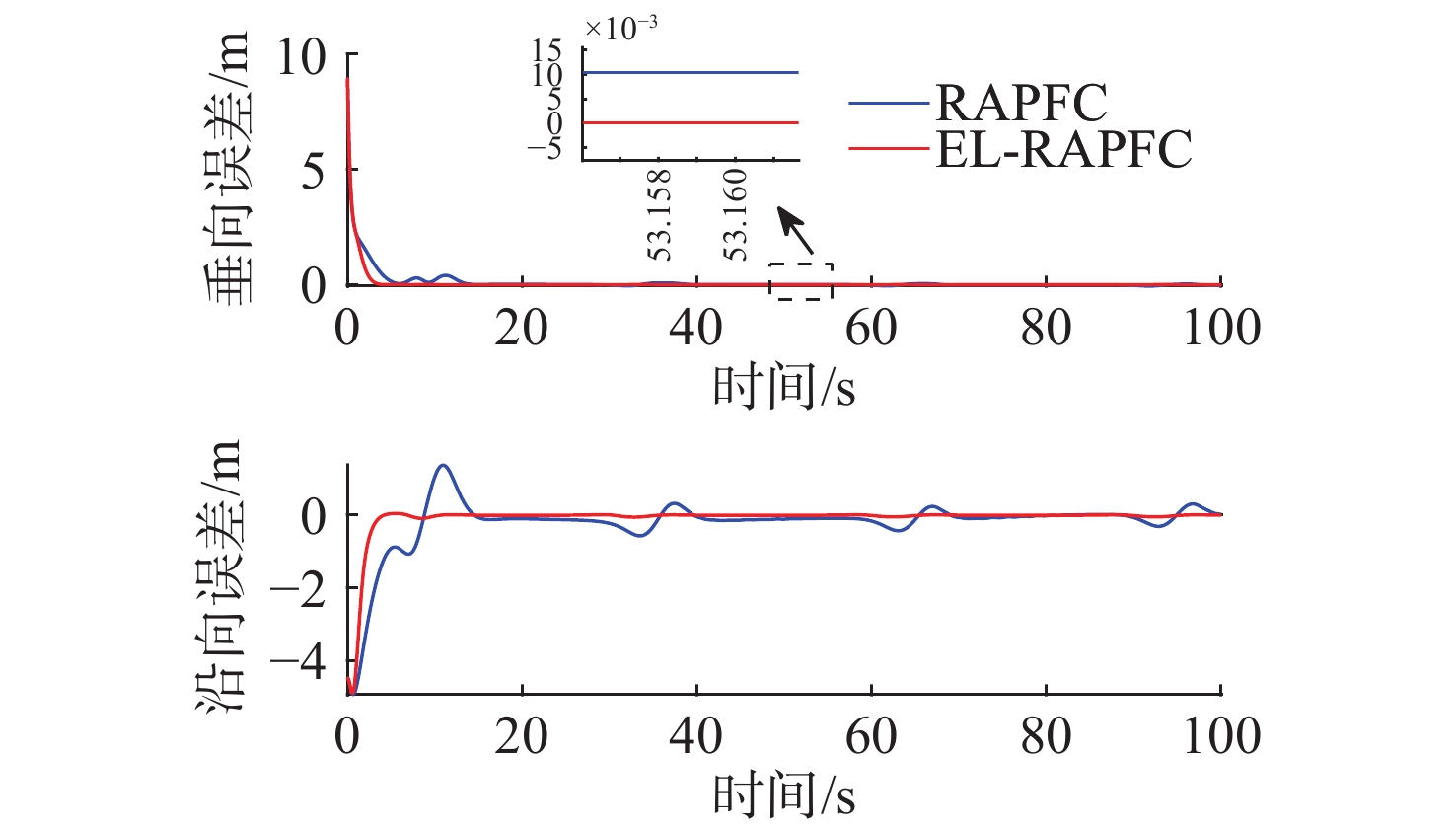
图 6 第1组仿真垂向与沿向跟踪误差
Figure 6. Vertical and along-direction tracking errors of the first set simulation
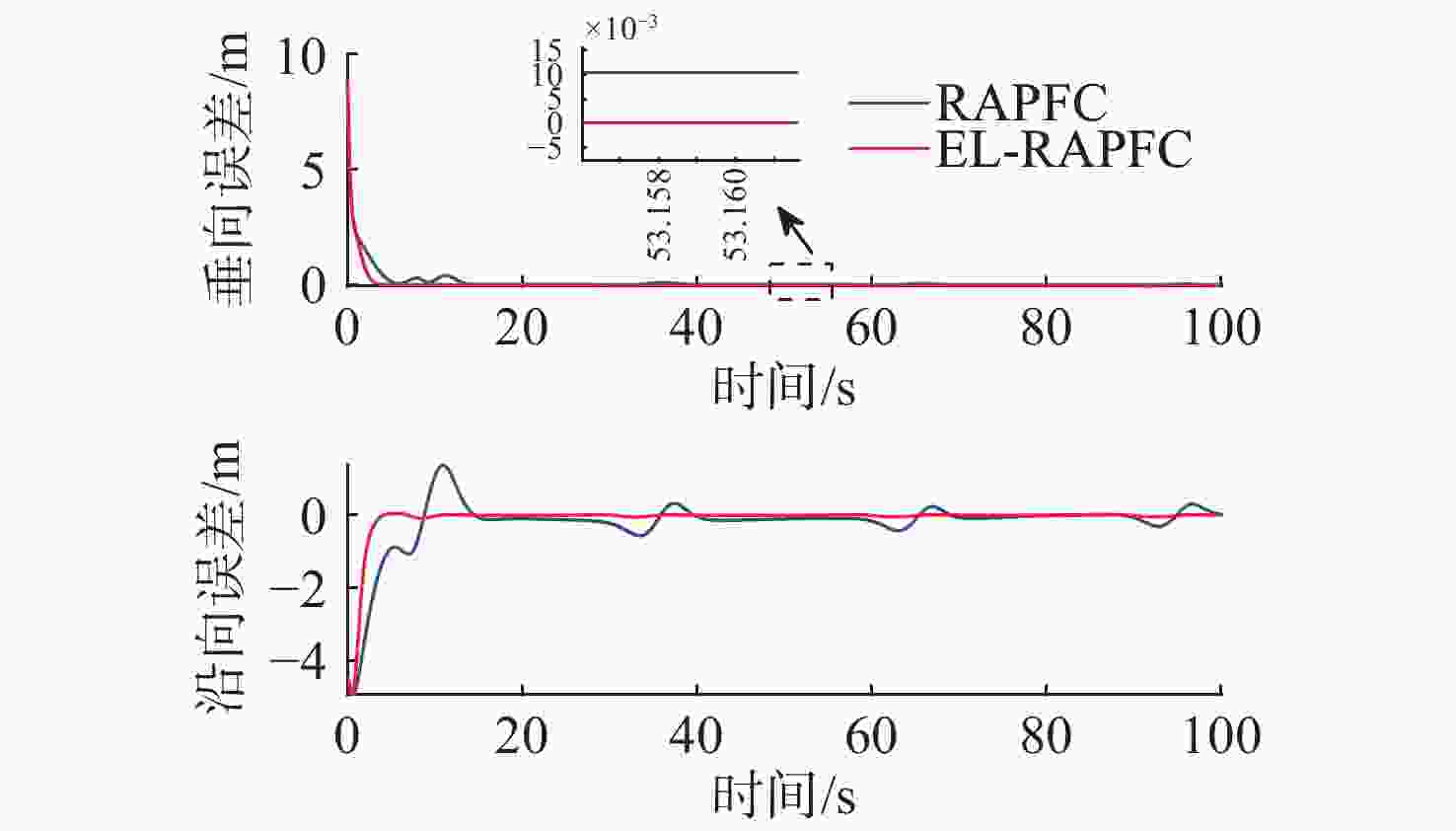
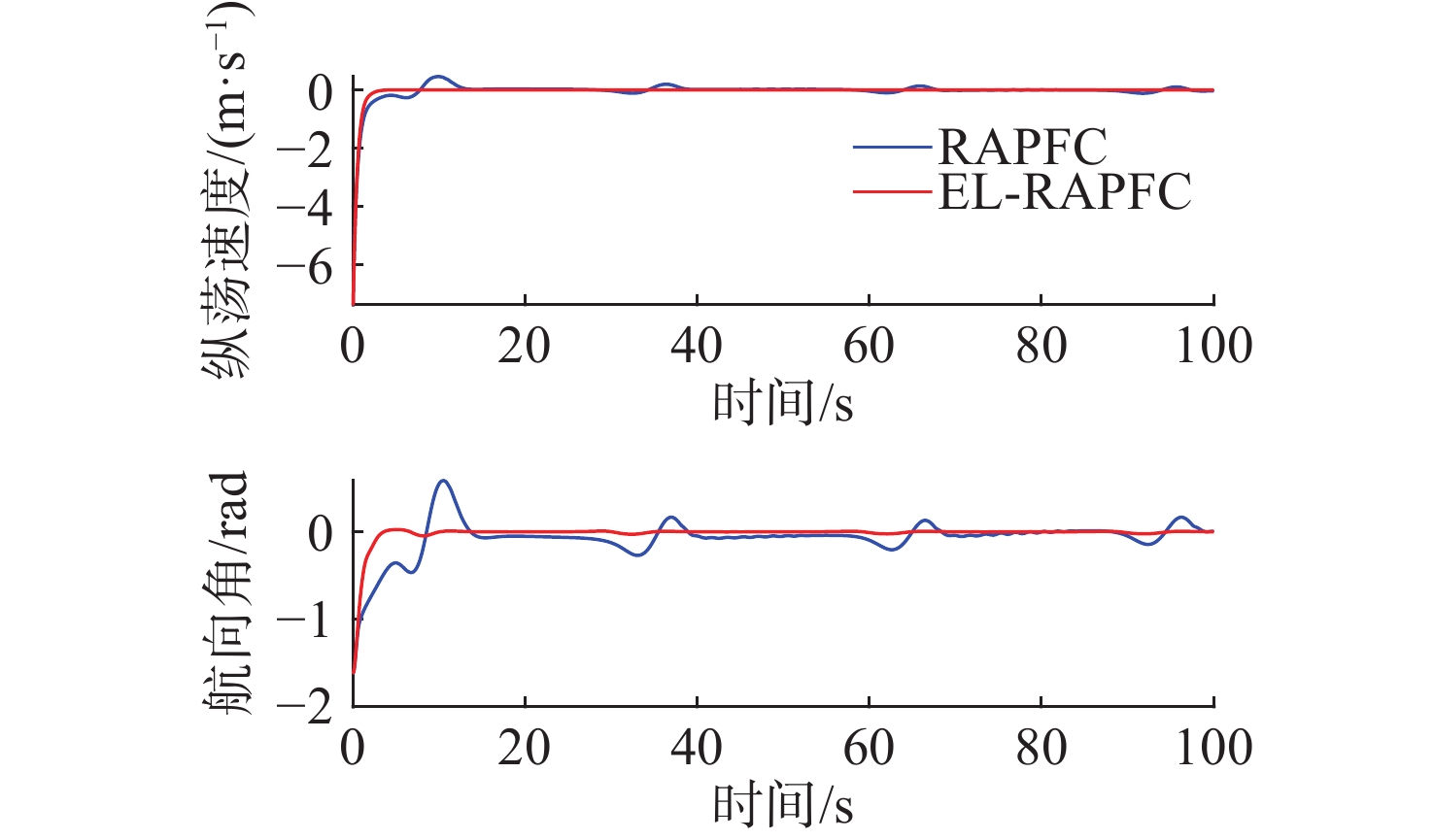
图 8 第2组仿真垂向与沿向跟踪误差
Figure 8. Vertical and along-direction tracking errors of the second set simulation
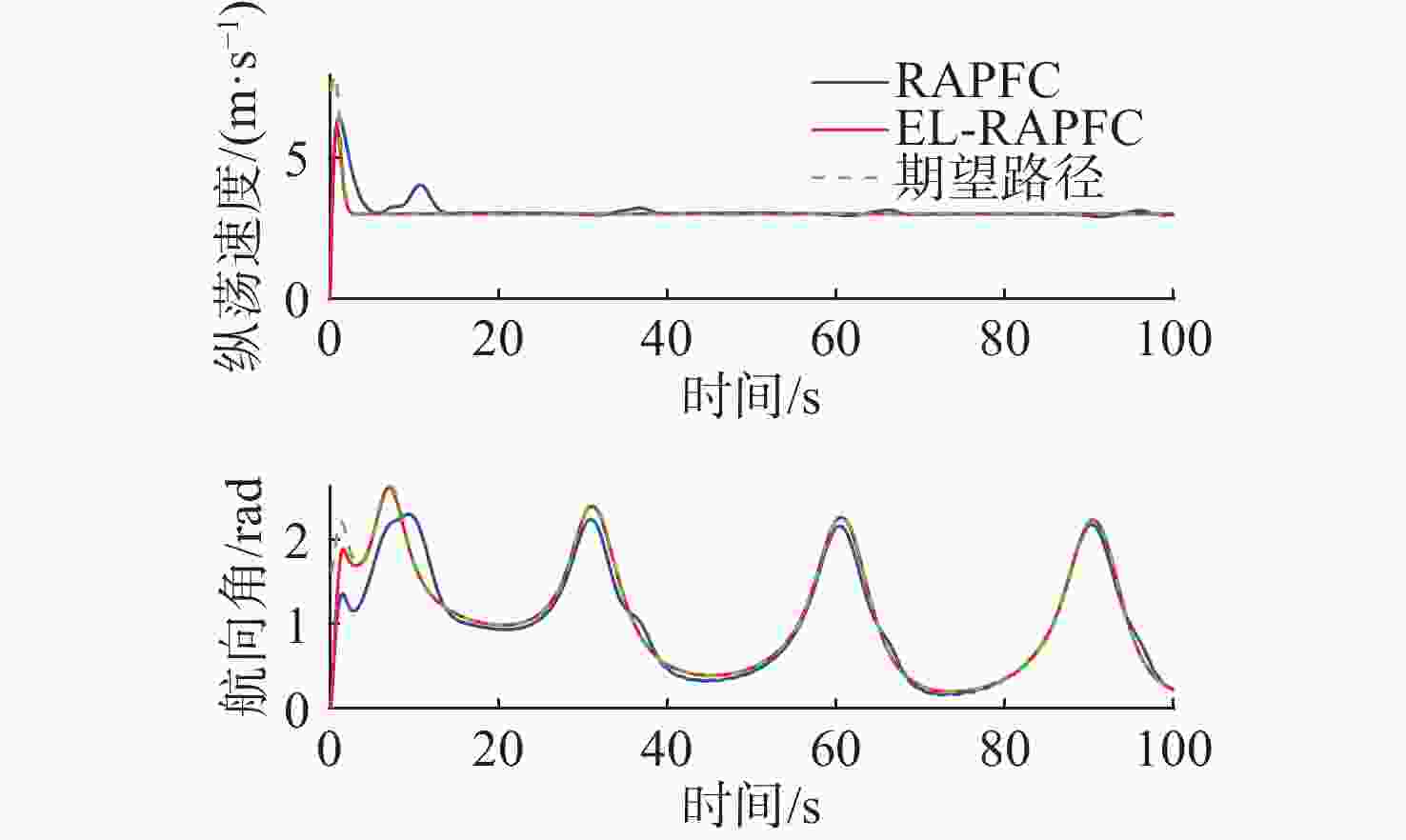
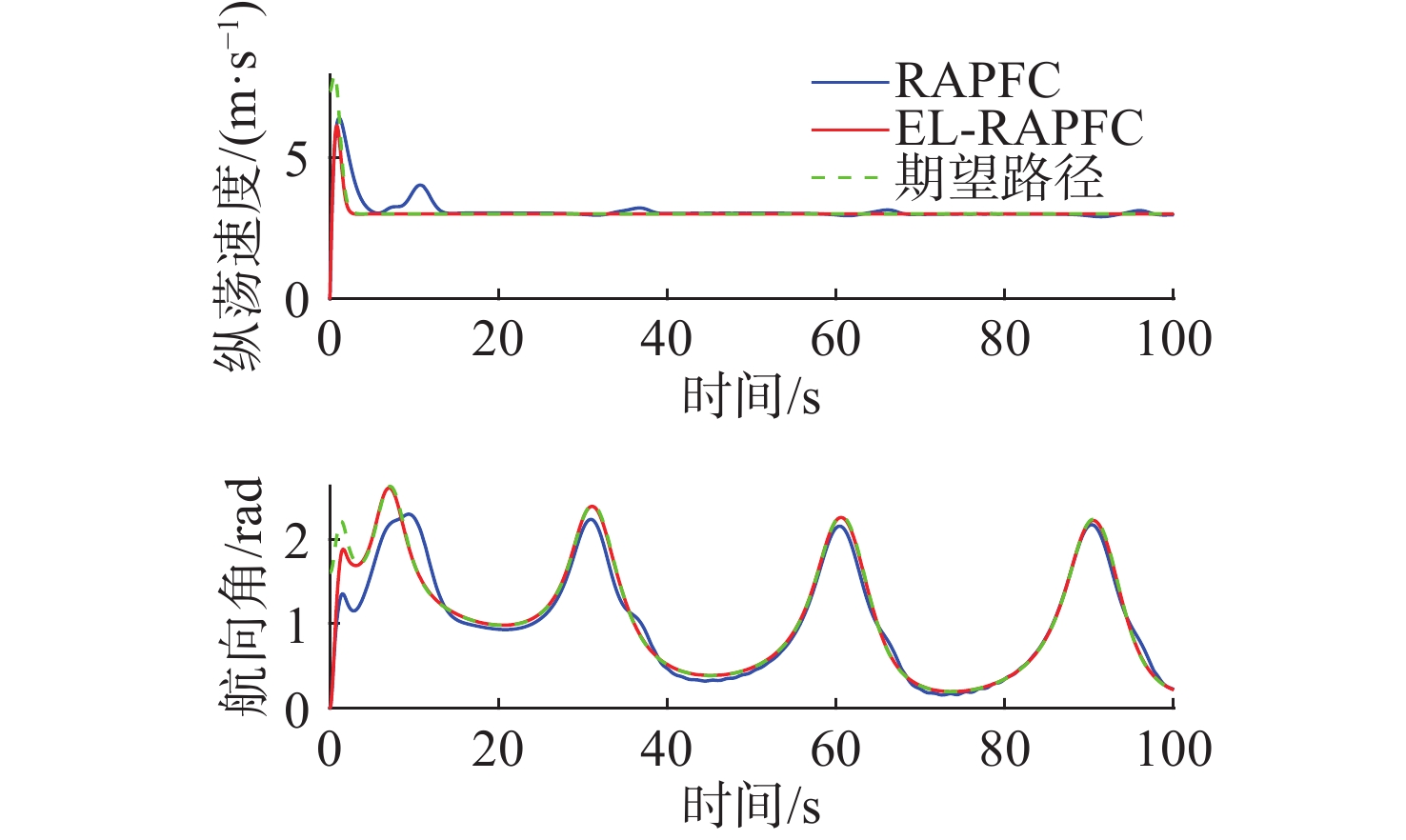
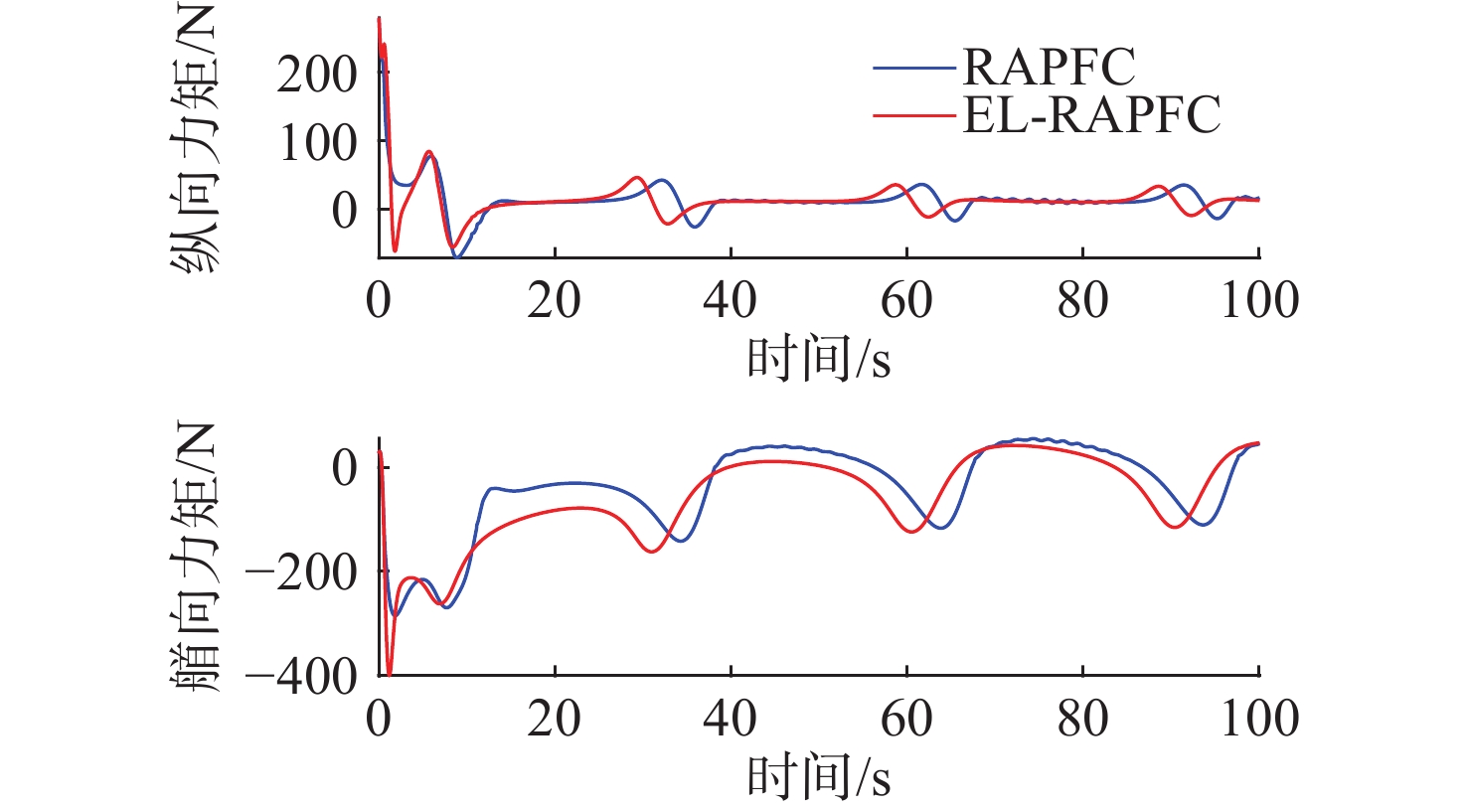
图 9 纵荡速度与航向角制导跟踪比较
Figure 9. Tracking comparison of surge velocity and heading angle guidance
-
[1] XU Z S, HE S M, ZHOU W J, et al. Path following control with sideslip reduction for underactuated unmanned surface vehicles[J]. IEEE Transactions on Industrial Electronics, 2024, 71(9): 11039-11047. doi: 10.1109/TIE.2023.3340191 [2] 于长东, 刘新阳, 陈聪, 等. 基于多智能体深度强化学习的无人艇集群博弈对抗研究[J]. 水下无人系统学报, 2024, 32(1): 79-86. doi: 10.11993/j.issn.2096-3920.2023-0159YU C D, LIU X Y, CHEN C, et al. Research on game confrontation of unmanned surface vehicles swarmbased on multi-agent deep reinforcement learning[J]. Journal of Unmanned Undersea Systems, 2024, 32(1): 79-86. doi: 10.11993/j.issn.2096-3920.2023-0159 [3] 谢少荣, 刘坚坚, 张丹. 复杂海况无人艇集群控制技术研究现状与发展[J]. 水下无人系统学报, 2020, 28(6): 584-596. doi: 10.11993/j.issn.2096-3920.2020.06.001XIE S R, LIU J J, ZHANG D. Current development of control technology for unmanned surface vessel clusters under complex sea conditions[J]. Journal of Unmanned Undersea Systems, 2020, 28(6): 584-596. doi: 10.11993/j.issn.2096-3920.2020.06.001 [4] 何红坤, 王宁. 欠驱动无人船单目视觉伺服镇定控制[J]. 中国舰船研究, 2022, 17(5): 166-174,183.HE H K, WANG N. Monocular visual servo-based stabilization control of underactuated unmanned surface vehicle[J]. Chinese Journal of Ship Research, 2022, 17(5): 166-174,183. [5] WANG N, GAO Y, YANG C, et al. Reinforcement-learning-based finite-time tracking control of an unknown unmanned surface vehicle with input constraints[J]. Neurocomputing, 2022, 484: 26-37. doi: 10.1016/j.neucom.2021.04.133 [6] WANG N, AHN C K. Hyperbolic-tangent LOS guidance-based finite-time path following of underactuated marine vehicles[J]. IEEE Transactions on Industrial Electronics, 2019, 67(10): 8566-8575. [7] FOSSEN T I, PETTERSEN K Y. On uniform semiglobal exponential stability(USGES) of proportional line-of-sight guidance laws[J]. Automatica, 2014, 50(11): 2912-2917. doi: 10.1016/j.automatica.2014.10.018 [8] FOSSEN T I, BREIVIK M, SKJETNE R. Line-of-sight path following of underactuated marine craft[J]. IFAC Proceedings Volumes, 2003, 36(21): 211-216. [9] CAHARIJA W, PETTERSEN K Y, BIBULI M, et al. Integral line-of-sight guidance and control of underactuated marine vehicles: Theory, simulations, and experiments[J]. IEEE Transactions on Control Systems Technology, 2016, 24: 1623-1642. doi: 10.1109/TCST.2015.2504838 [10] FOSSEN T I, PETTERSEN K Y, GALEAZZI R. Line-of-Sight path following for dubins paths with adaptive sideslip compensation of drift forces[J]. IEEE Transactions on Control Systems Technology, 2014, 23(2): 820-827. [11] MOE S, PETTERSEN K Y, FOSSEN T I, et al. Line-of-sight curved path following for underactuated usvs and auvs in the horizontal plane under the influence of ocean currents[C]//2016 24th Mediterranean Conference on Control and Automation(MED). Athens, Greece: IEEE, 2016: 38-45. [12] WANG N, SUN Z, YIN J C, et al. Fuzzy unknown observer-based robust adaptive path following control of underactuated surface vehicles subject to multiple unknowns[J]. Ocean Engineering, 2019, 176: 57-64. doi: 10.1016/j.oceaneng.2019.02.017 [13] WANG N, SUN Z, JIAO Y H, et al. Surge-heading guidance-based finite-time path following of underactuated marine vehicles[J]. IEEE Transactions on Vehicular Technology, 2019, 68(9): 8523-8532. doi: 10.1109/TVT.2019.2927893 [14] 刘炳文, 于金鹏, 刘加朋, 等. 考虑输入饱和的无人艇神经网络命令滤波反步控制[J]. 船舶工程, 2024, 46(4): 123-129.LIU B W, YU J P, LIU J P, et al. Neural network-based command filtered backstepping control for USV with input saturation[J]. Ship Engineering, 2024, 46(4): 123-129. [15] XIAO Y F, FENG Y, LIU T, et al. Integral sliding mode based finite-time tracking control for underactuated surface vessels with external disturbances[J]. Journal of Marine Science and Engineering, 2021, 9(11): 1204. doi: 10.3390/jmse9111204 [16] CHEN H, CHEN Y, WANG M Q. Trajectory tracking for underactuated surface vessels with time delays and unknown control directions[J]. IET Control Theory and Applications, 2022, 16(6): 587-599. doi: 10.1049/cth2.12250 [17] RUBIO J D J. Robust feedback linearization for nonlinear processes control[J]. ISA Transactions, 2018, 74: 155-164. doi: 10.1016/j.isatra.2018.01.017 [18] ROUT R, CUI R X, YAN W S. Sideslip-compensated guidance-based adaptive neural control of marine surface vessels[J]. IEEE Transactions on Cybernetics, 2020, 52(5): 2860-2871. [19] HUANG G B, ZHU Q Y, SIEW C K. Extreme learning machine: Theory and applications[J]. Neurocomputing, 2006, 70(1): 489-501. [20] HUANG G B, CHEN L, SIEW C K. Universal approximation using incremental constructive feedforward networks with random hidden nodes[J]. IEEE Transactions on Neural Networks, 2006, 17(4): 879-892. doi: 10.1109/TNN.2006.875977 [21] WANG N, SUN J C, ER M J, et al. A novel extreme learning control framework of unmanned surface vehicles[J]. IEEE Transactions on Cybernetics, 2016, 46(5): 1106-1117. doi: 10.1109/TCYB.2015.2423635 [22] SUN J C, WANG N, ER M J, et al. Extreme learning control of surface vehicles with unknown dynamics and disturbances[J]. Neurocomputing, 2015, 167: 535-542. doi: 10.1016/j.neucom.2015.04.039 [23] FOSSEN T I. Handbook of marine craft hydrodynamics and motion control[M]. New York: John Wiley & Sons, 2011. [24] KHALIL H K. Nonlinear systems[M]. 2nd, Upper Saddle River, NJ, USA: Prentice-Hall, 1996. [25] GHOMMAM J, MNIF F, BENAL A, et al. Observer design for Euler-Lagrange systems: Application to path following control of an underactuated surface vessel[C]// IEEE International Conference on Intelligent Robots and Systems. San Diego, CA, USA: IEEE, 2007: 2883-2888. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 637
- HTML全文浏览量: 186
- PDF下载量: 90
- 被引次数: 0

图(13)




