

Research on Drag Reduction Optimization of Foldable Solar Wings for UUVs
-
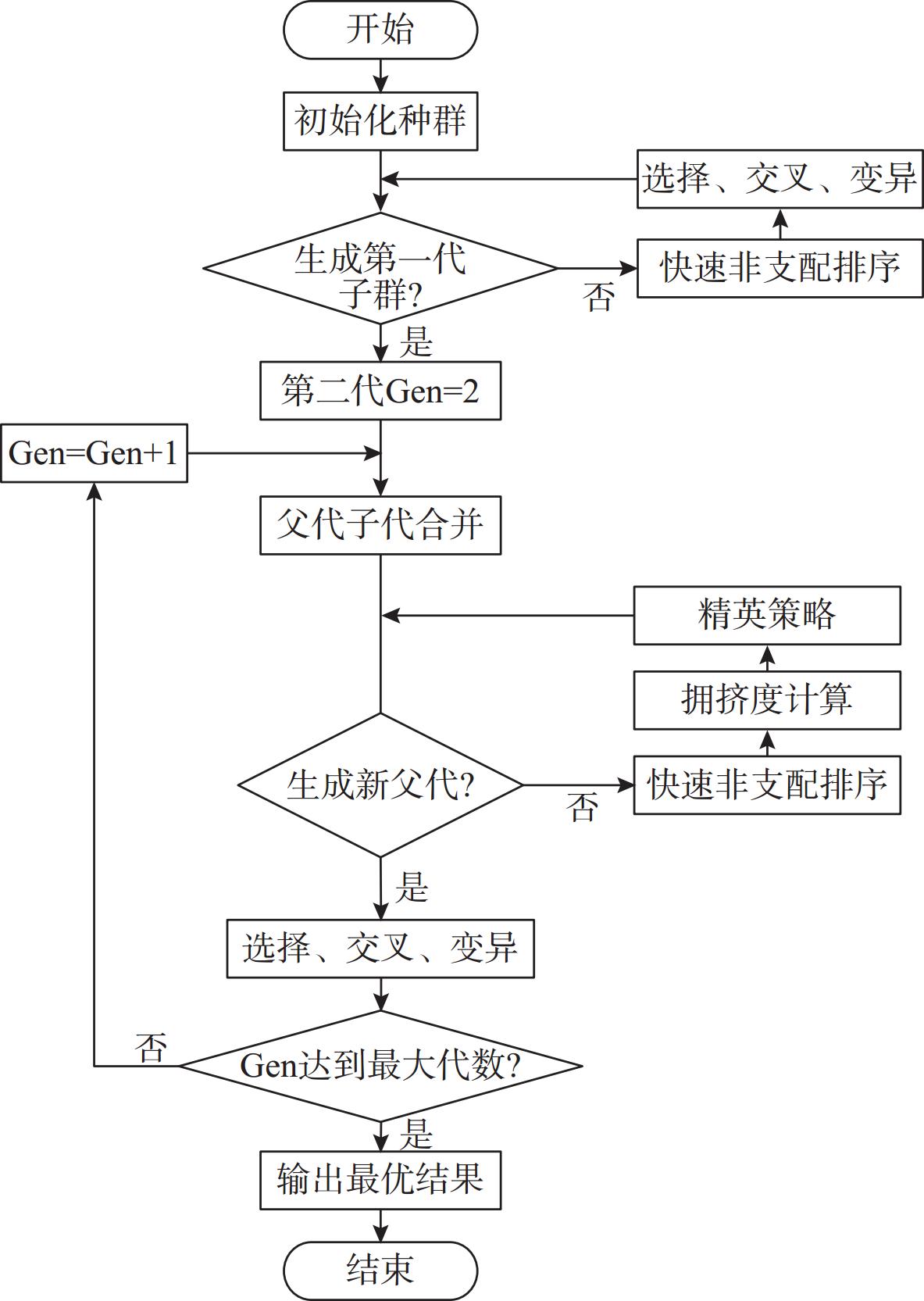
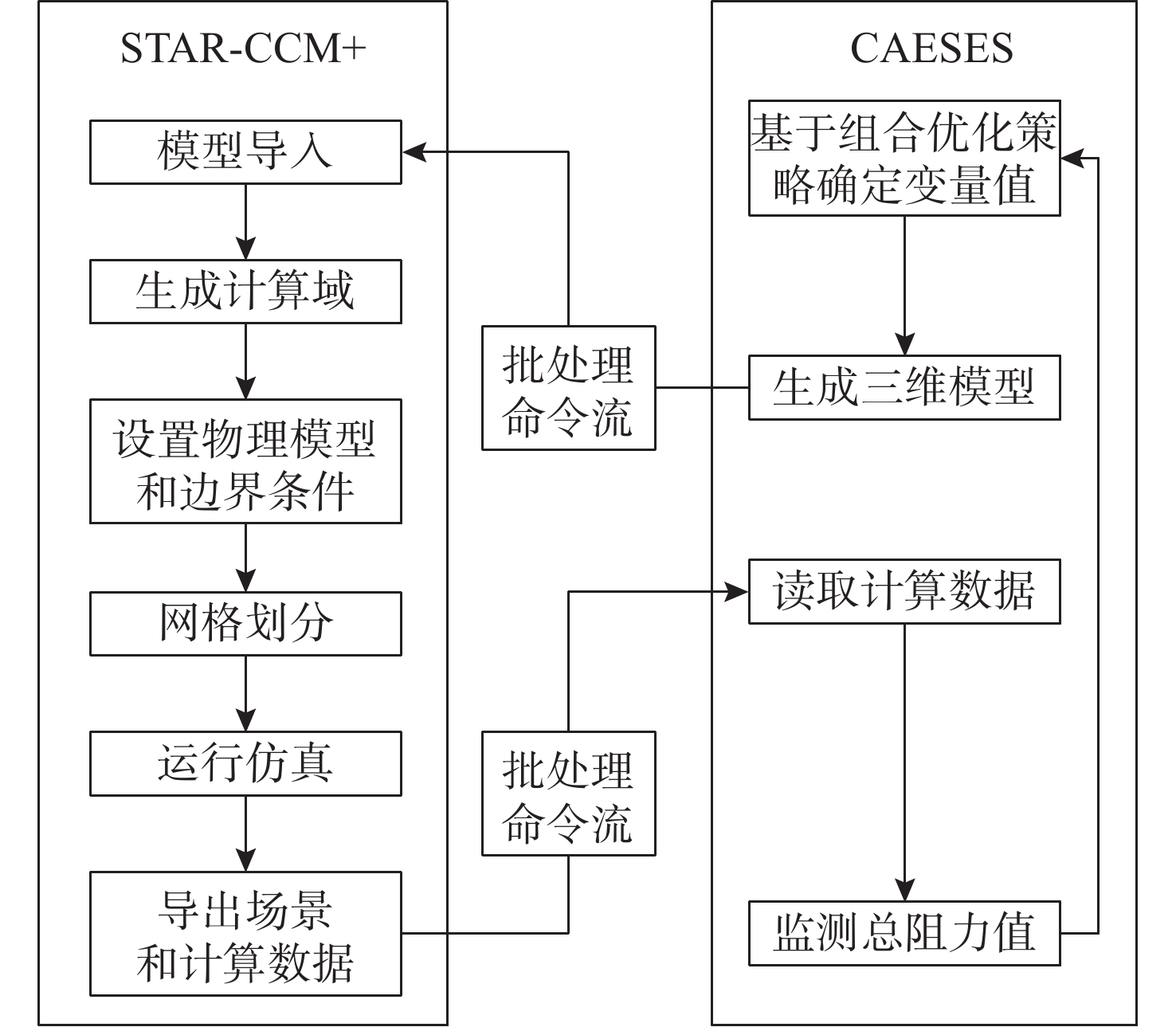
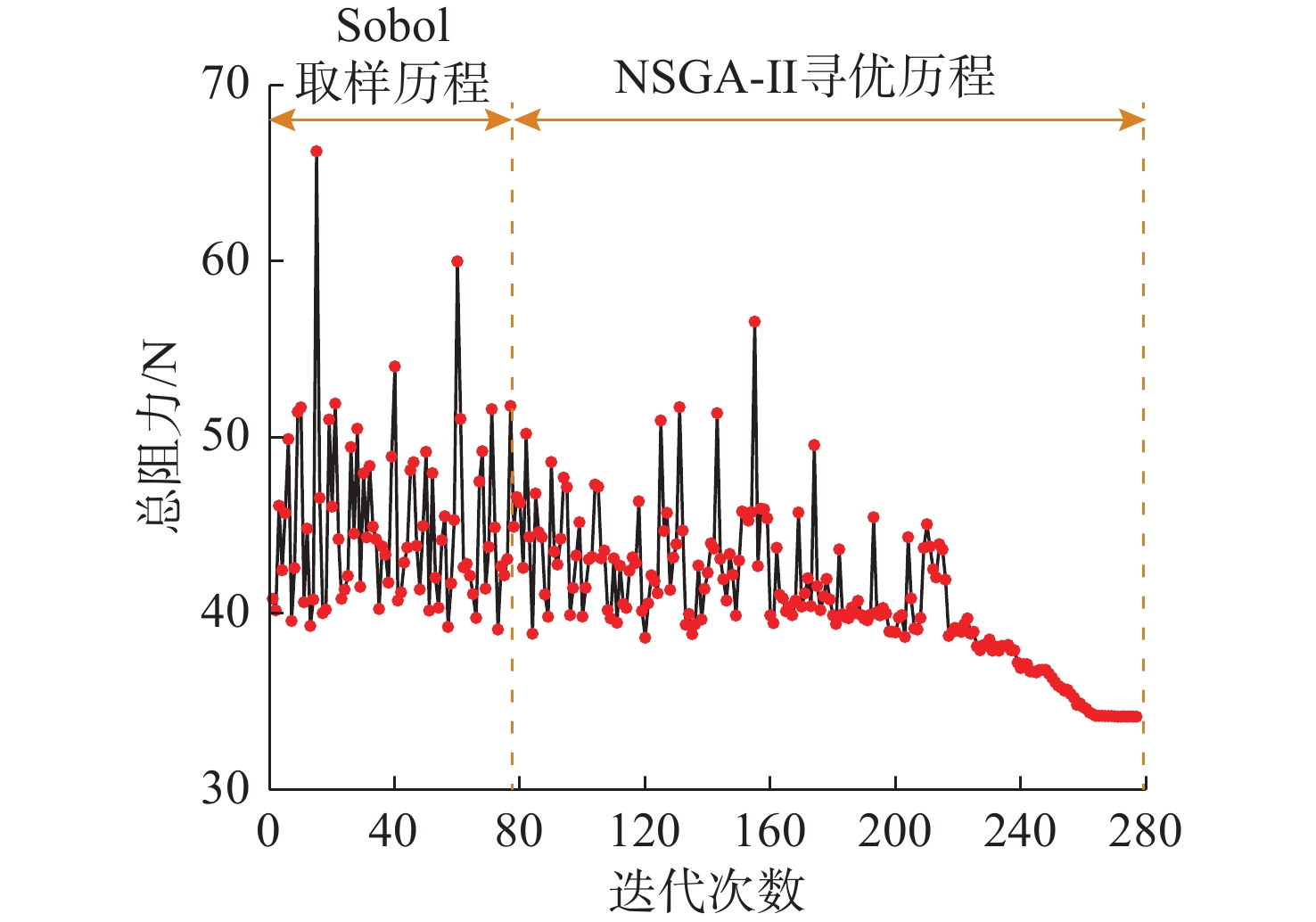
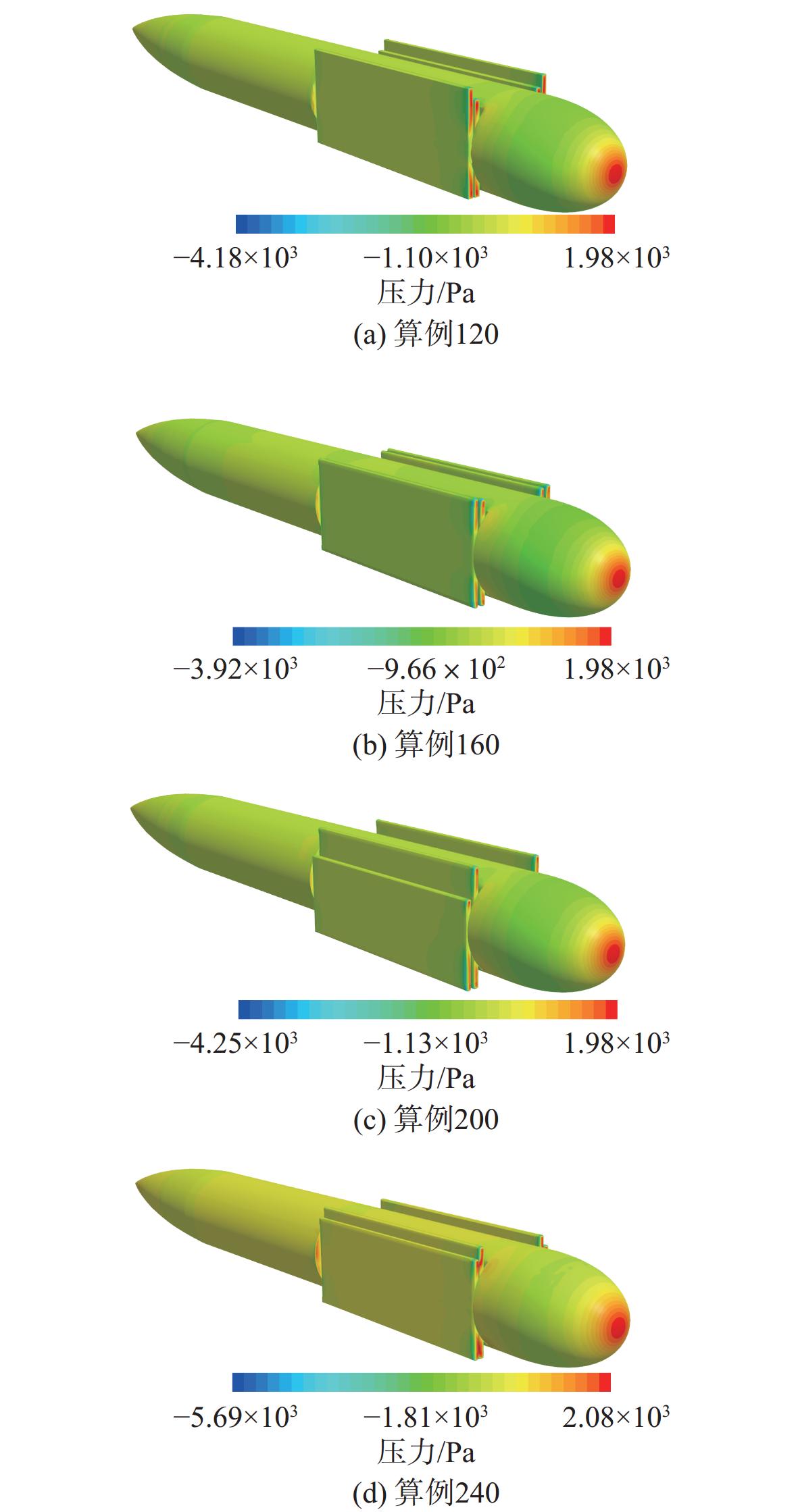
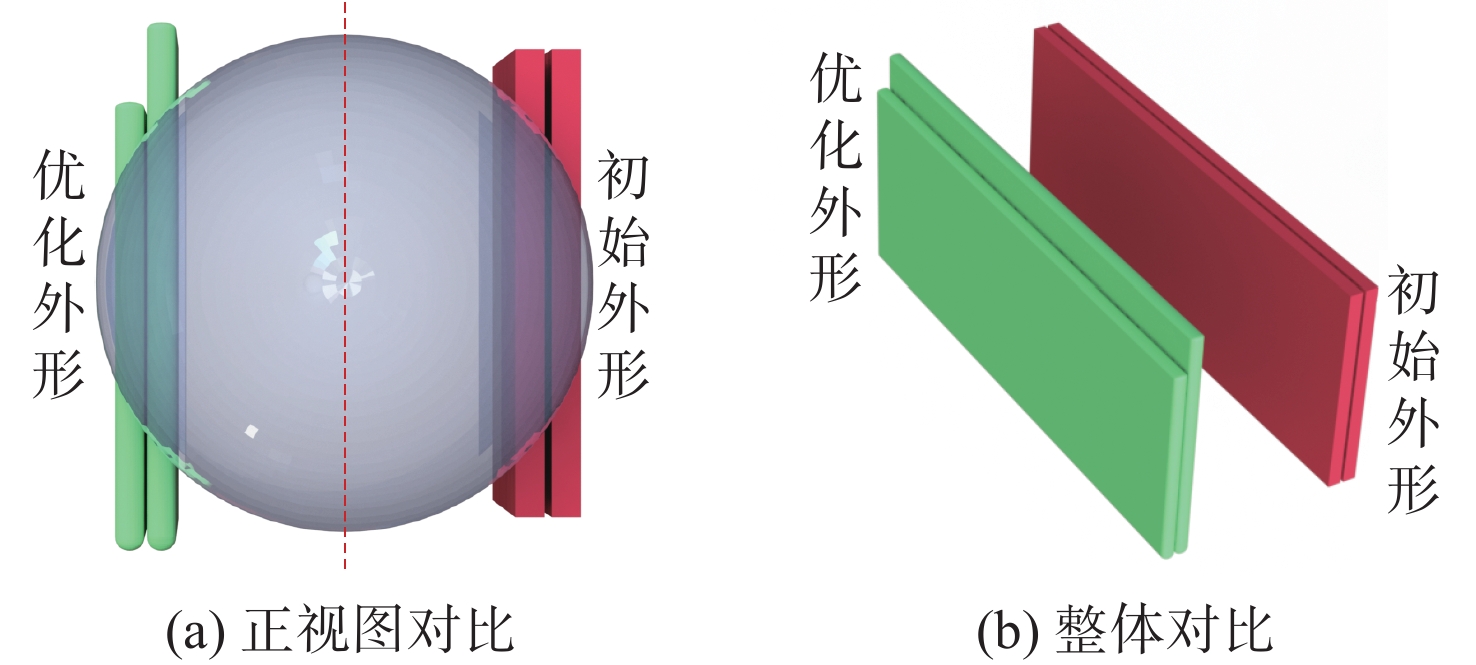
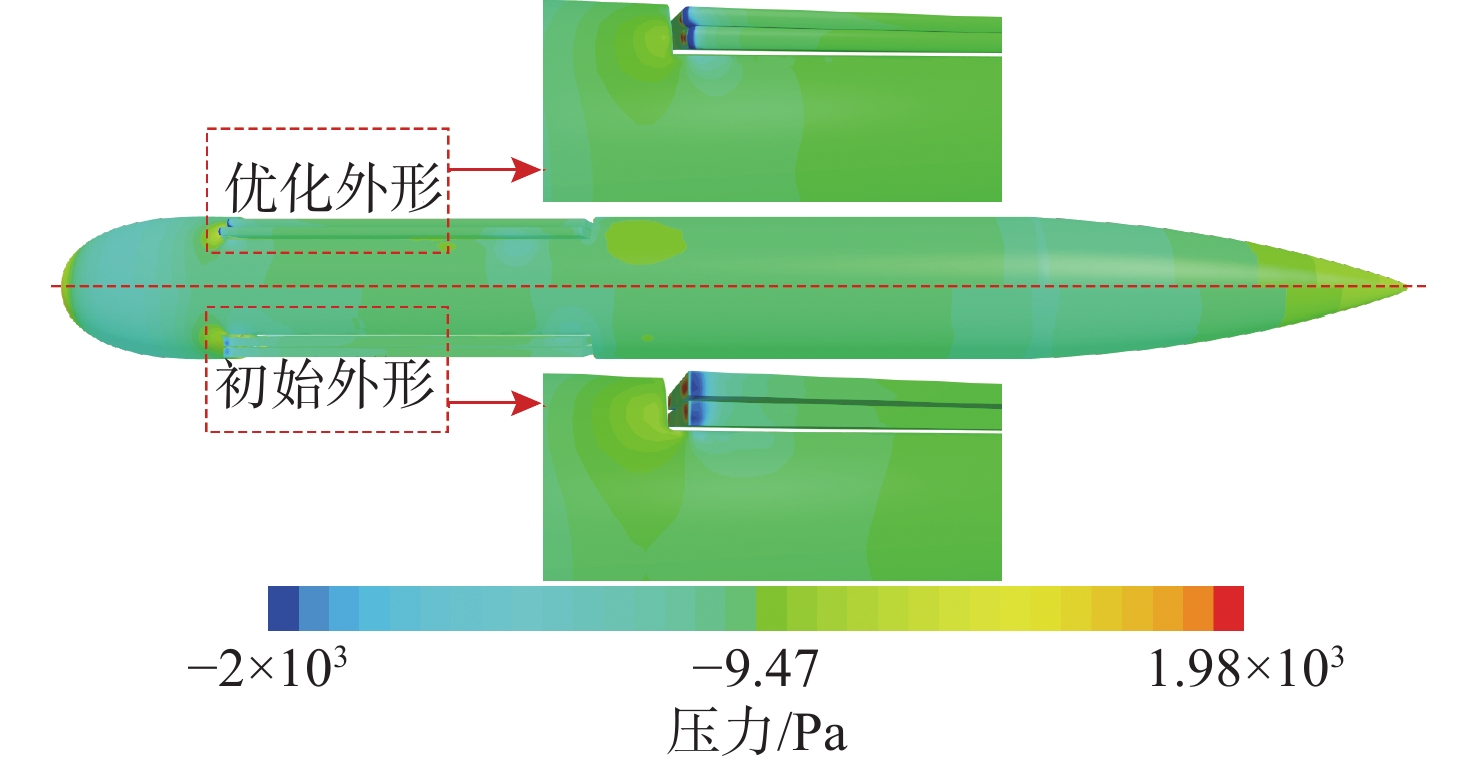
摘要: 针对无人水下航行器(UUV)在海洋观测、资源勘探等任务中面临的续航瓶颈问题, 文中聚焦新型可折叠太阳能翼板水动力性能优化问题。为平衡计算效率与优化精度, 以翼板特征点坐标、各边圆角因子、翼板间间隙以及翼板与艇体间隙为设计变量, 在CAESES软件中建立翼板参数化模型, 创新性地构建了Sobol全局取样与非支配排序遗传算法Ⅱ(NSGA-Ⅱ)优化算法相结合的混合优化框架: 首先利用Sobol算法在各变量阈值范围内生成80组样本点以充分探索设计空间, 继而通过NSGA-Ⅱ算法进行多代寻优。为避免传统代理模型精度衰减问题, 搭建了高精度水动力求解与优化算法耦合计算流程, 实现CAESES与STAR-CCM+软件的自动联合仿真, 对配备不同形状翼板的UUV逐一进行水动力分析, 探讨不同参数组合对总阻力的影响规律。优化结果表明: 2块翼板凸出艇体部分存在一定高度差有利于降低总阻力; 流场分析证实, 优化后的外形有效抑制了湍流引起的能量耗散。文中所提出的“参数化建模-智能优化-高精度验证”技术路线, 不仅降低了新构型UUV的直航阻力, 也为复杂附体优化提供了方法论参考, 对提升水下装备的能源利用效率具有重要工程价值。Abstract: To respond to the endurance bottleneck faced by unmanned undersea vehicles(UUVs) in missions such as ocean observation and resource exploration, this paper studied the hydrodynamic performance optimization of a novel foldable solar wing. To balance computational efficiency and optimization accuracy, a parametric model of the wing was established in CAESES software with variables including wing point coordinates, rounding factors of wing edges, wing gaps, and gaps between the wing and the hull. Innovatively, a hybrid optimization framework combining Sobol global sampling and the non-dominatedsorting genetic algorithm II(NSGA-II) optimization algorithm was constructed. Firstly, the Sobol algorithm was used to generate 80 sample points within the threshold space of each variable to fully explore the design space, followed by multi-generation optimization through NSGA-II. To avoid the accuracy degradation of traditional surrogate models, a coupled computational process integrating high-precision hydrodynamic solutions and optimization algorithms was established, enabling automatic co-simulation between CAESES and STAR-CCM + software. Hydrodynamic analyses were conducted on UUVs equipped with wings of different shapes to explore the impact of different parameter combinations on total drag. The optimization results indicate that a certain height difference between the two wing sections protruding from the hull is beneficial for reducing total drag. Flow field analysis shows that the optimized shape effectively suppresses energy dissipation caused by turbulence. The proposed technical route of parametric modeling, intelligent optimization, and high-precision verification not only reduces the straight-line drag of the UUV with a new configuration but also provides a methodological reference for the optimization of complex appendages, possessing significant engineering value for improving the energy utilization efficiency of underwater equipment.
-
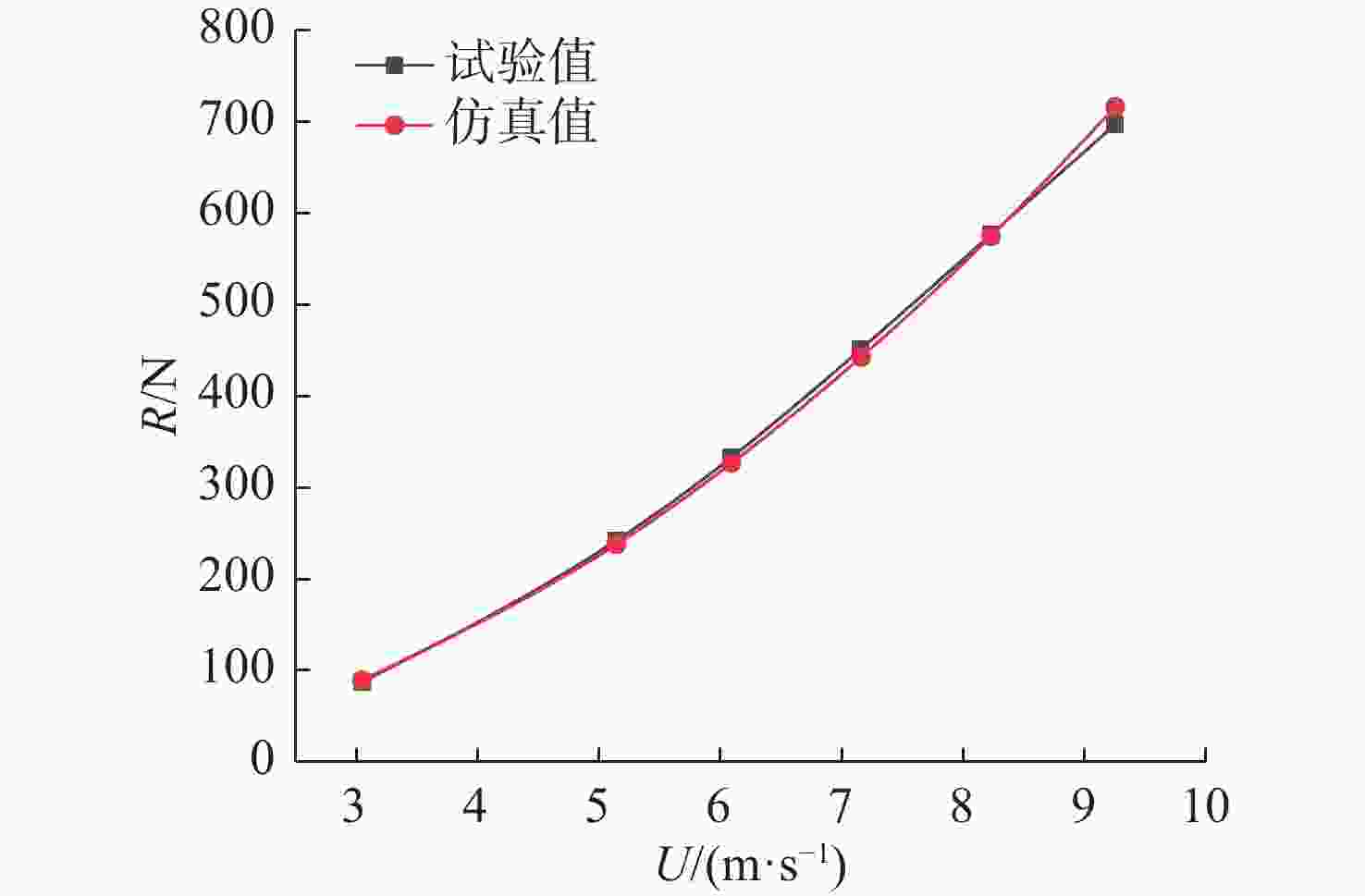
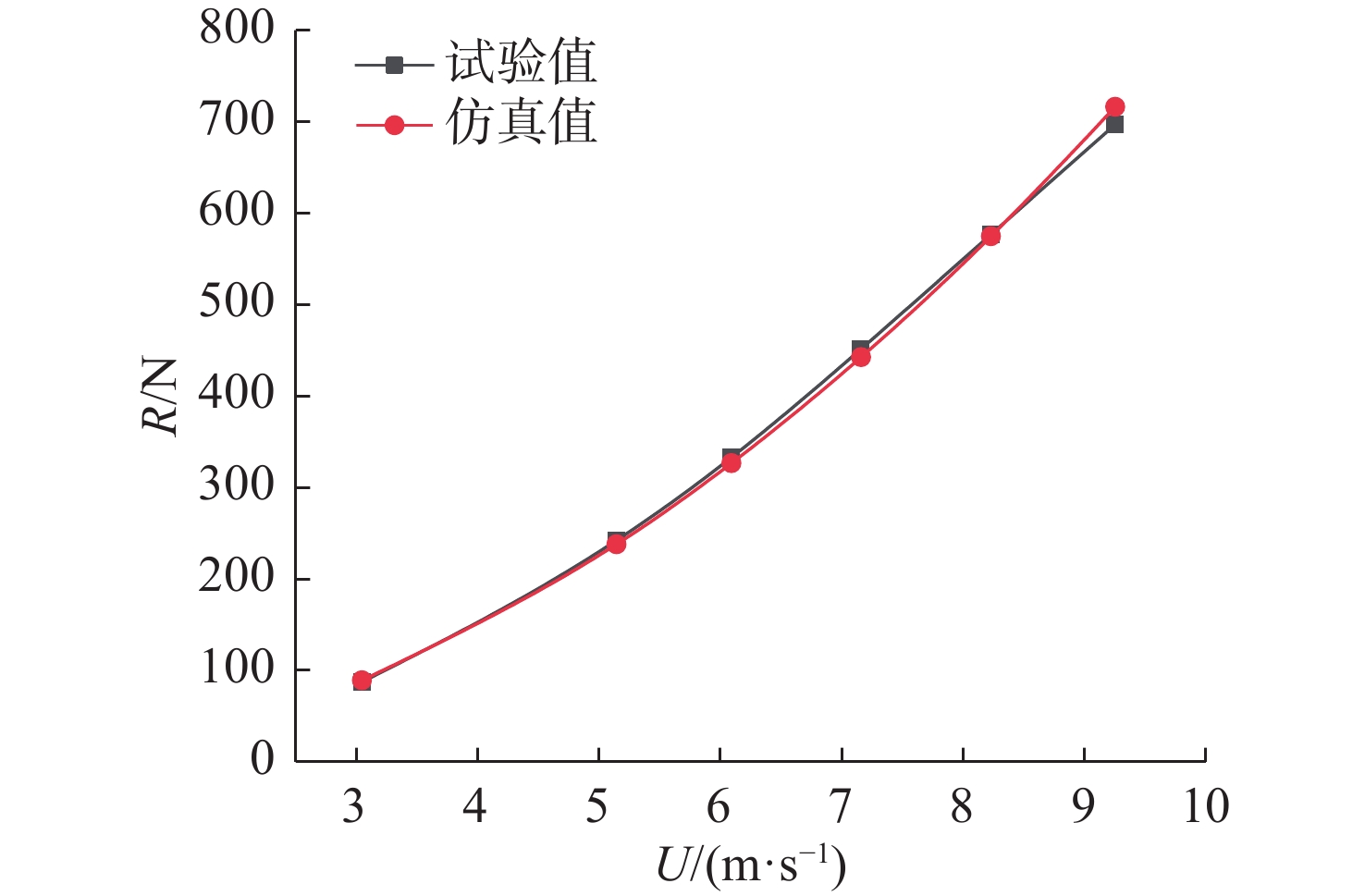
图 6 数值仿真与实验结果对比
Figure 6. Comparison between numerical simulation and experimental results
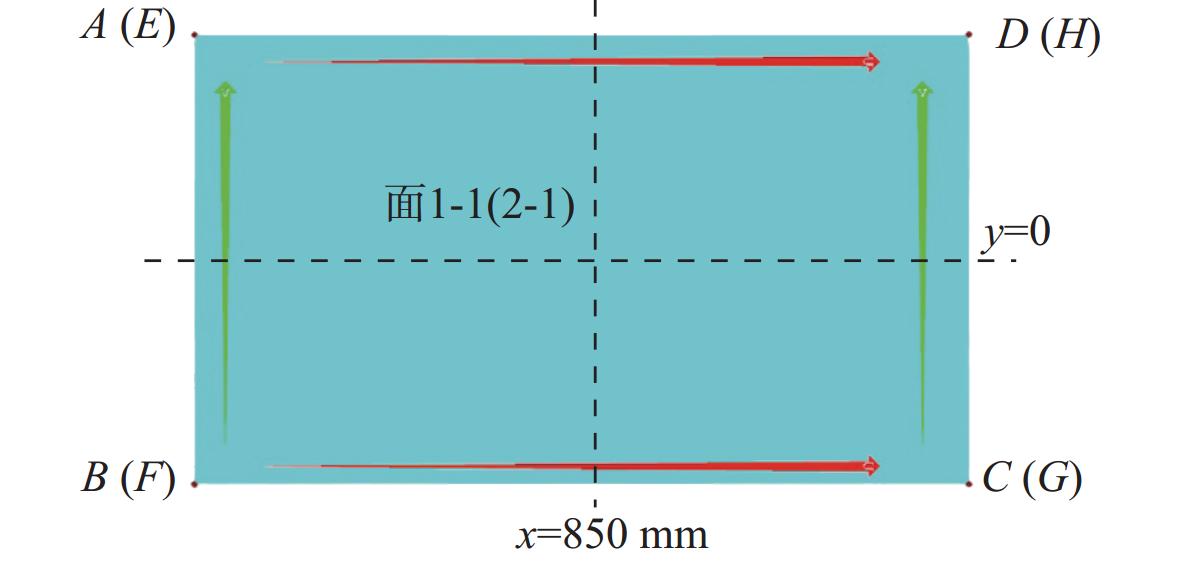
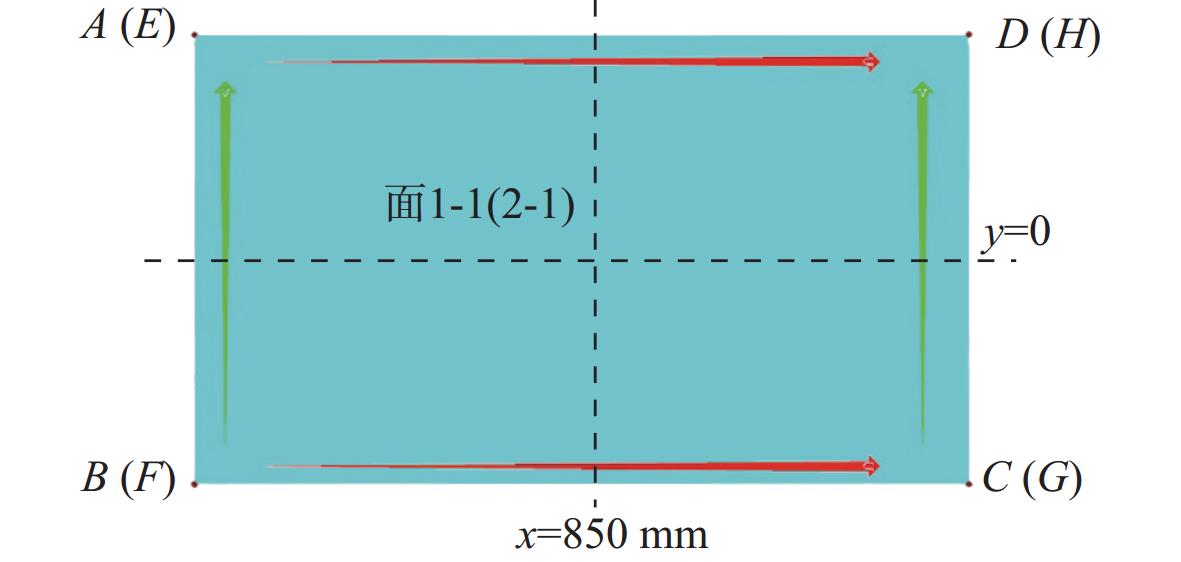
图 8 控制平面形状的特征点分布
Figure 8. Distribution of characteristic points controlling the shape of a plane
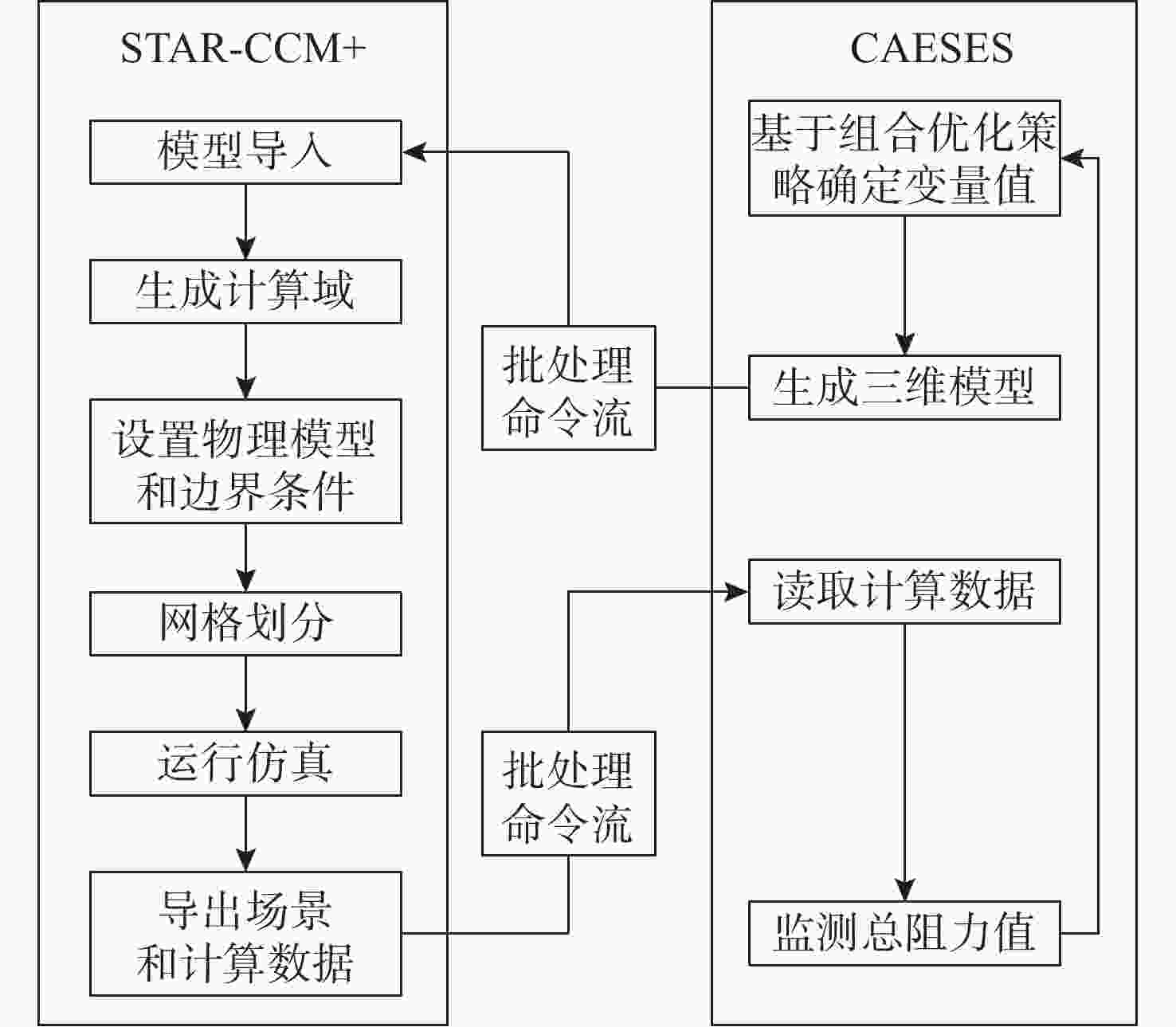
图 11 STAR-CCM+与CAESES耦合仿真流程
Figure 11. Coupled simulation flow chart of STAR-CCM+ and CAESES
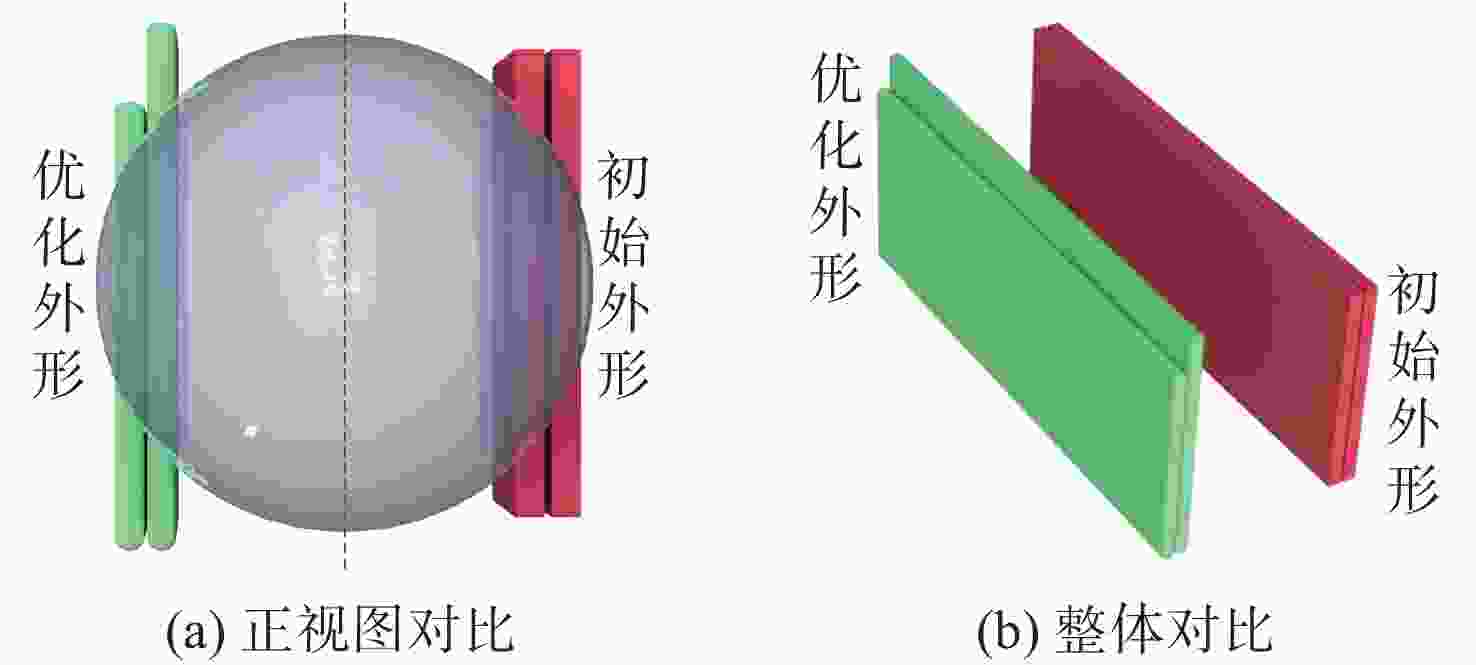
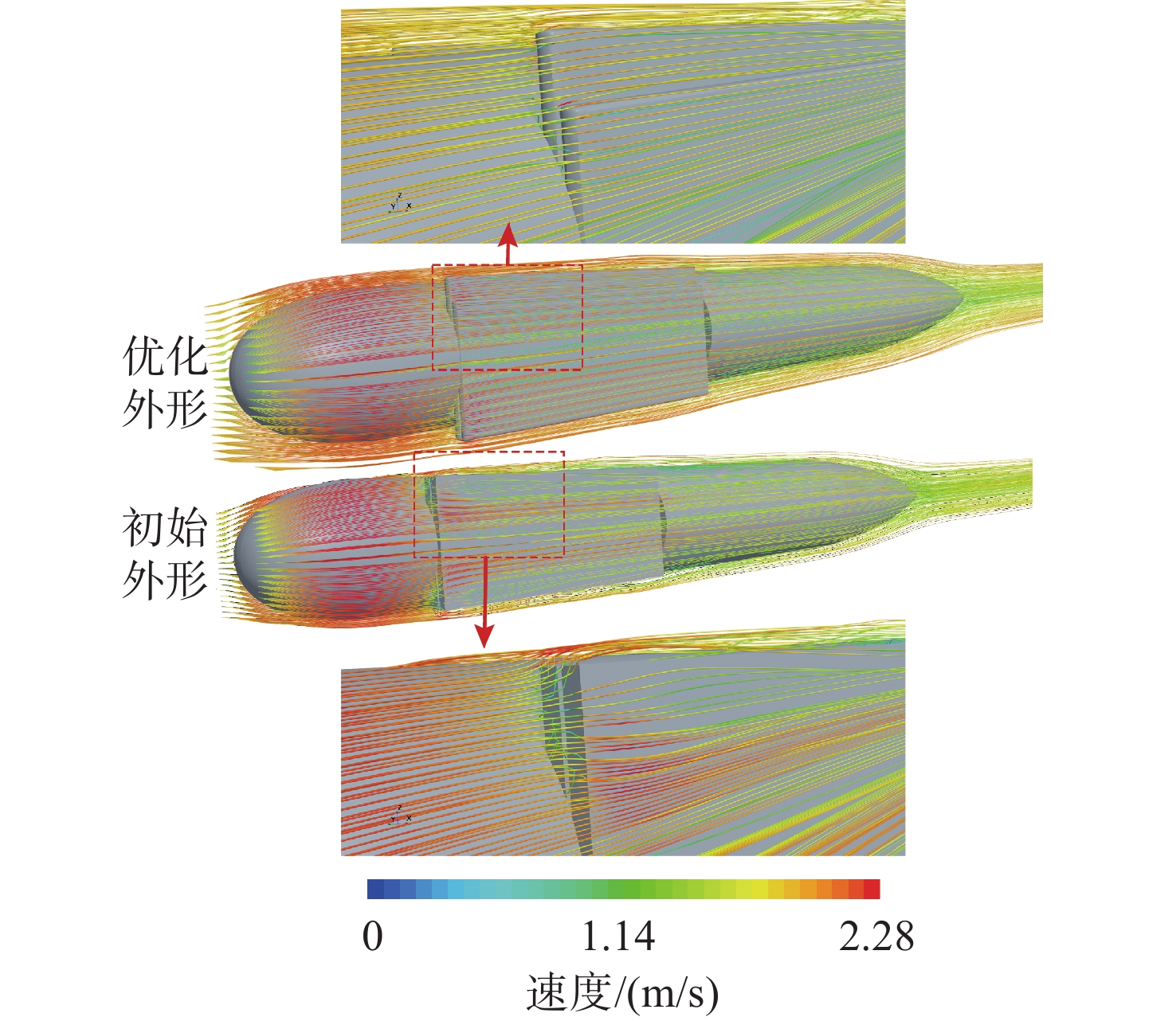
图 14 优化前后翼板形状对比图
Figure 14. Comparison of wing plate shapes before and after optimization
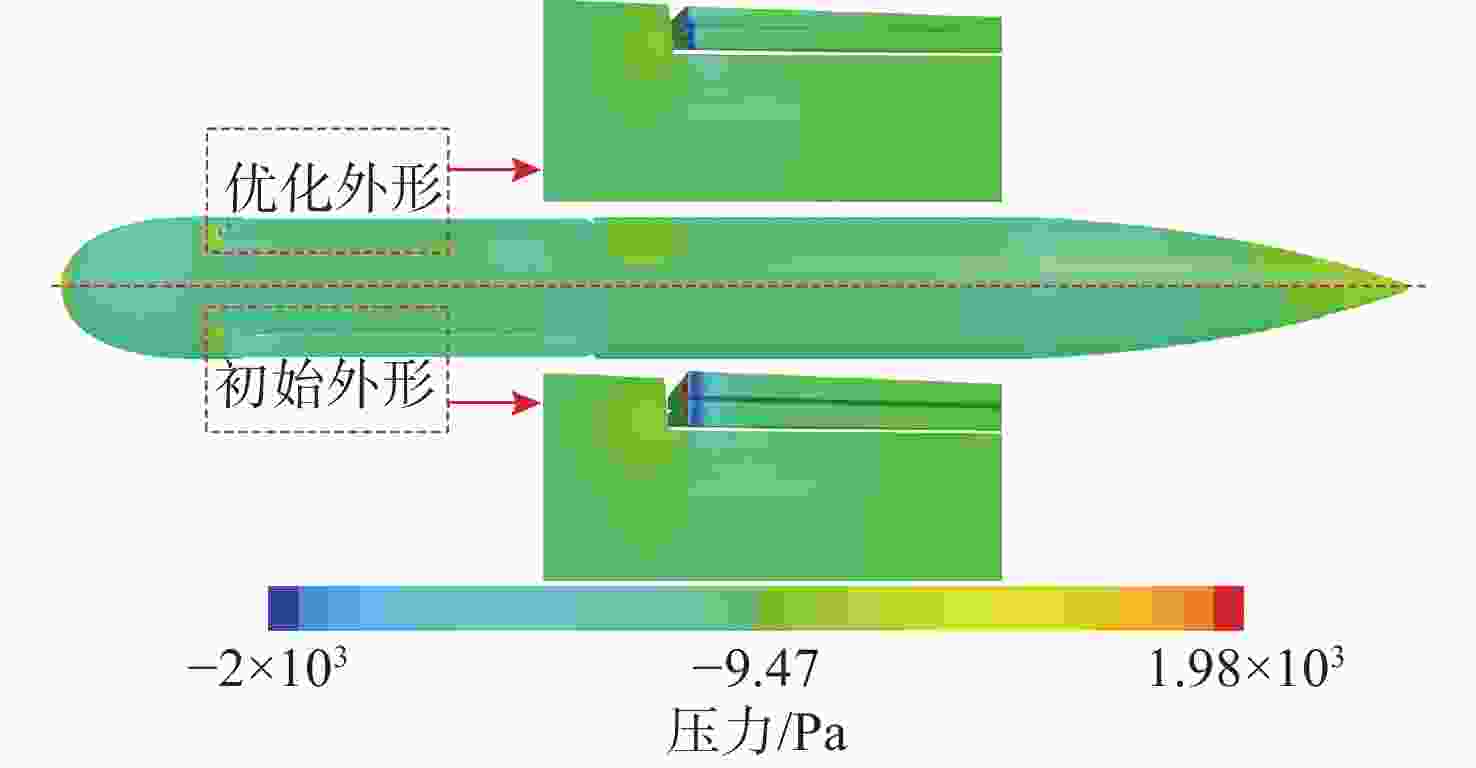
图 15 优化前后艇体表面压力对比图
Figure 15. Comparison of hull surface pressure before and after optimization
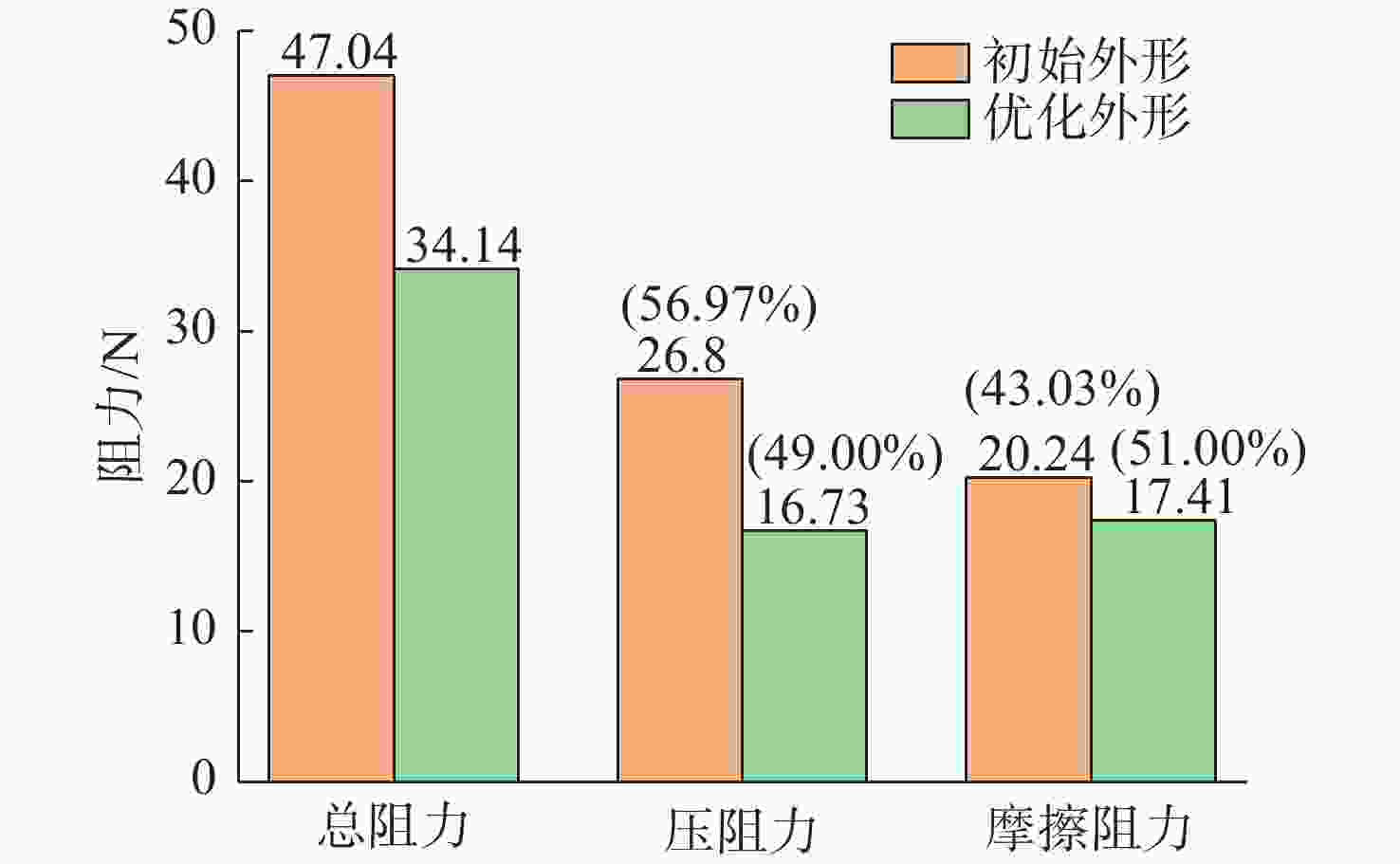
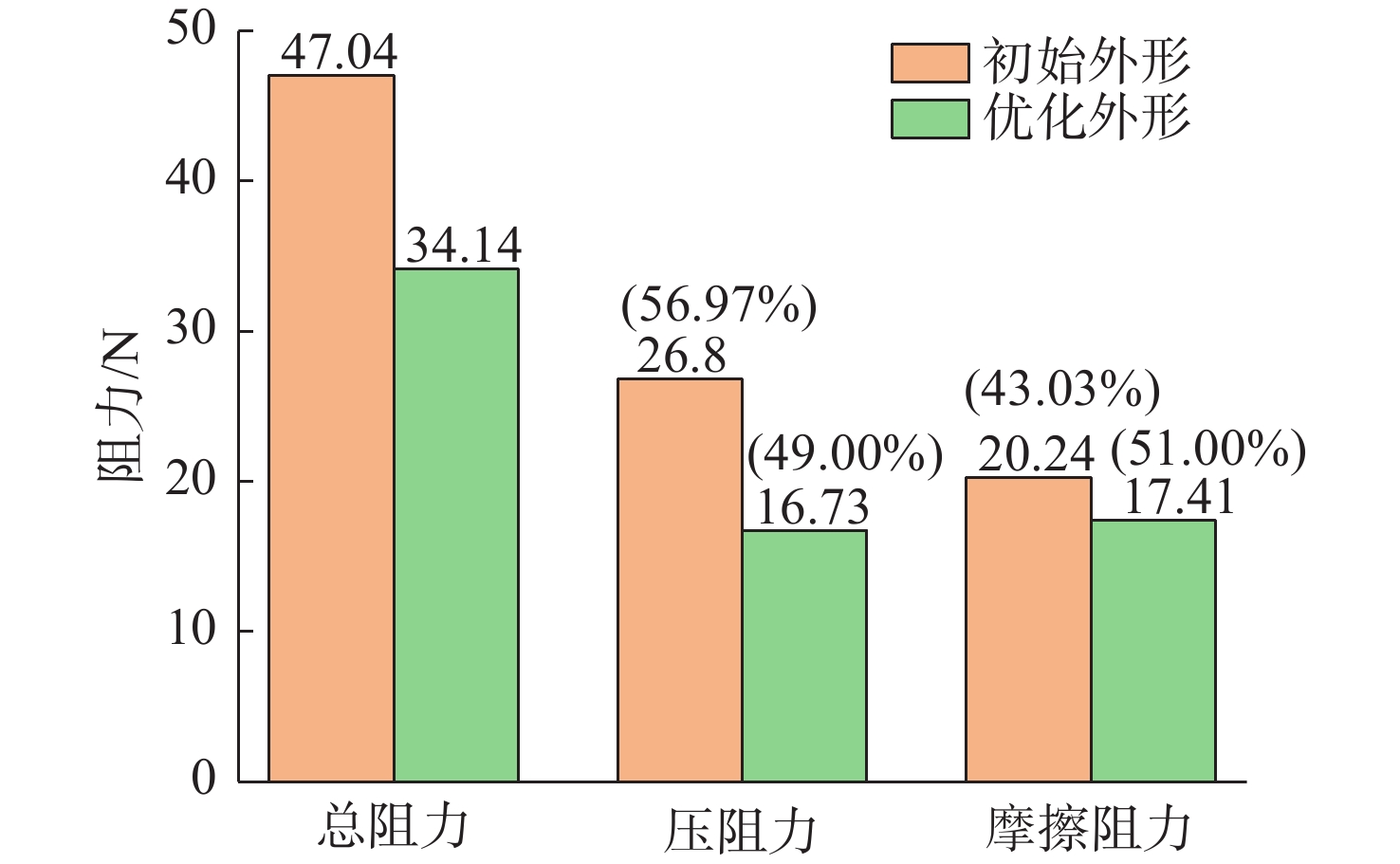
图 16 优化前后阻力成分对比
Figure 16. Comparison of resistance components before and after optimization
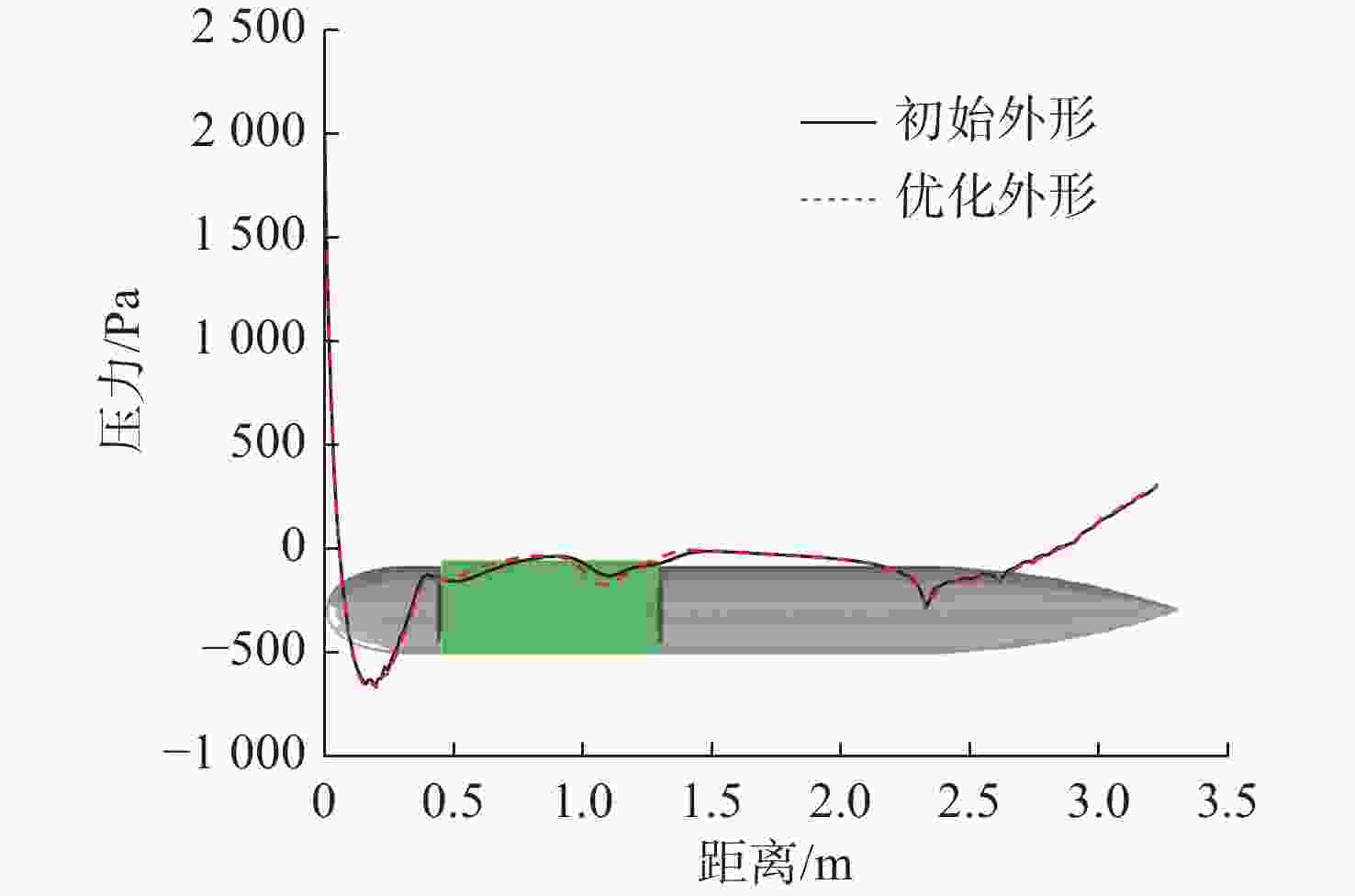
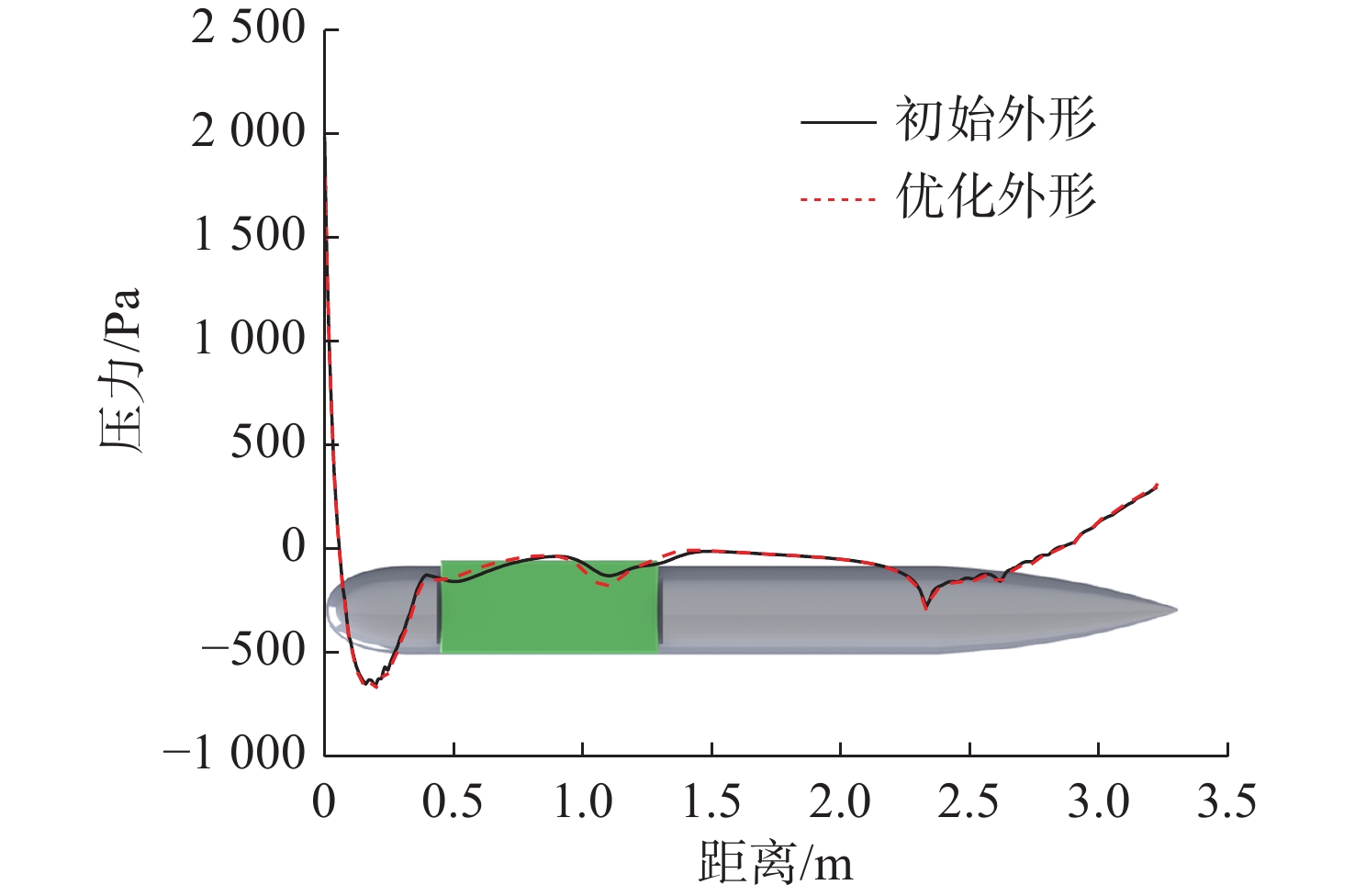
图 17 沿X方向艇体表面压力分布曲线
Figure 17. Pressure distribution curves along the hull surface in the X-direction
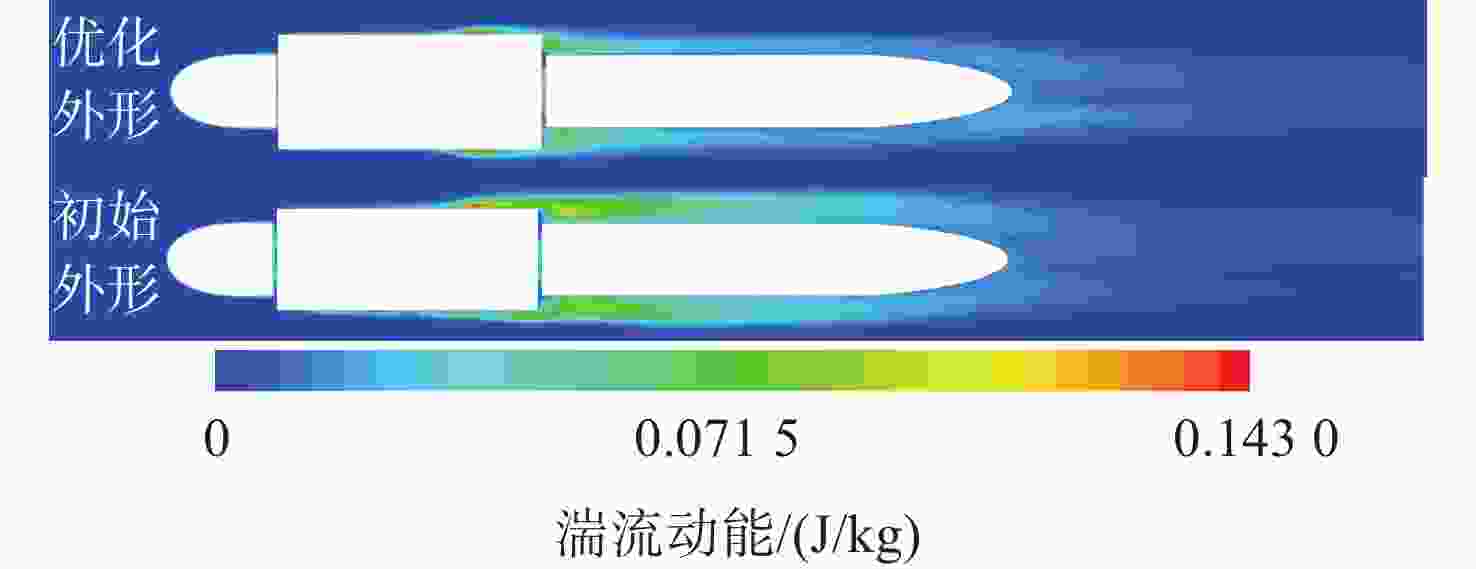
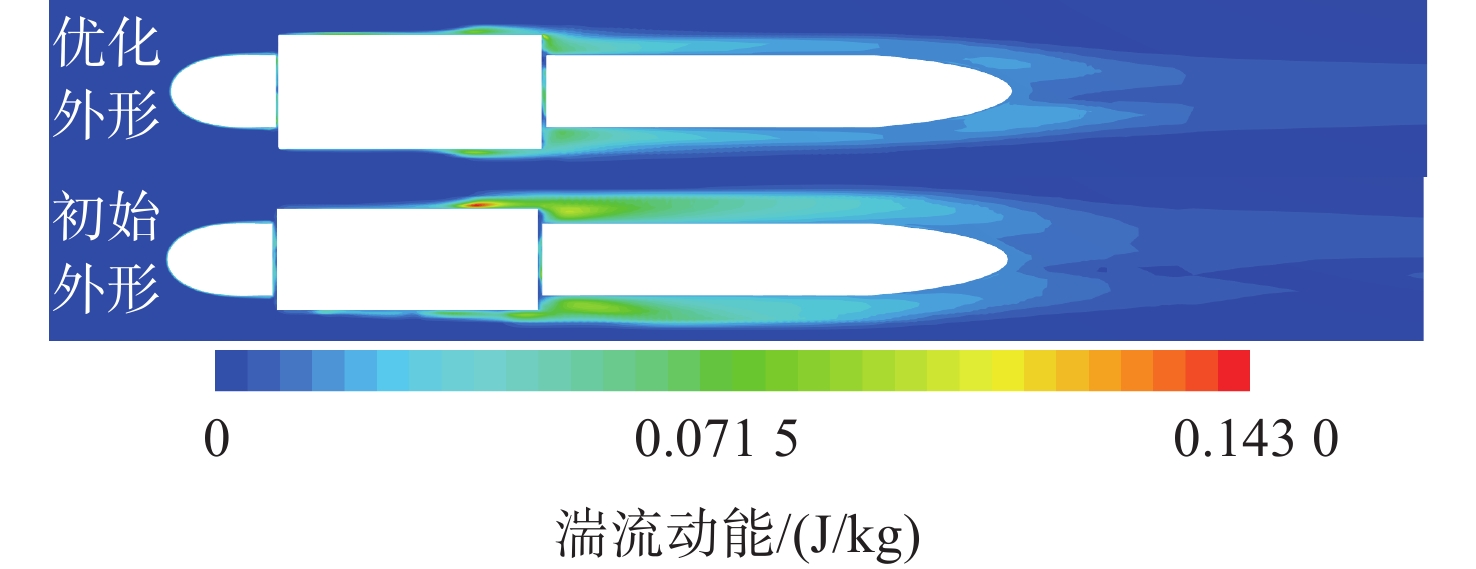
图 19 优化前后湍流动能对比图
Figure 19. Comparison of turbulent kinetic energy before and after optimization
表 1 模型参数
Table 1. Parameters of the model
mm 参数 数值 参数 数值 总长度 3 242 最大直径 336 艏部长度 350 平行中体长度 1 950 艉部长度 942 太阳能舱段长度 860  下载: 导出CSV
下载: 导出CSV
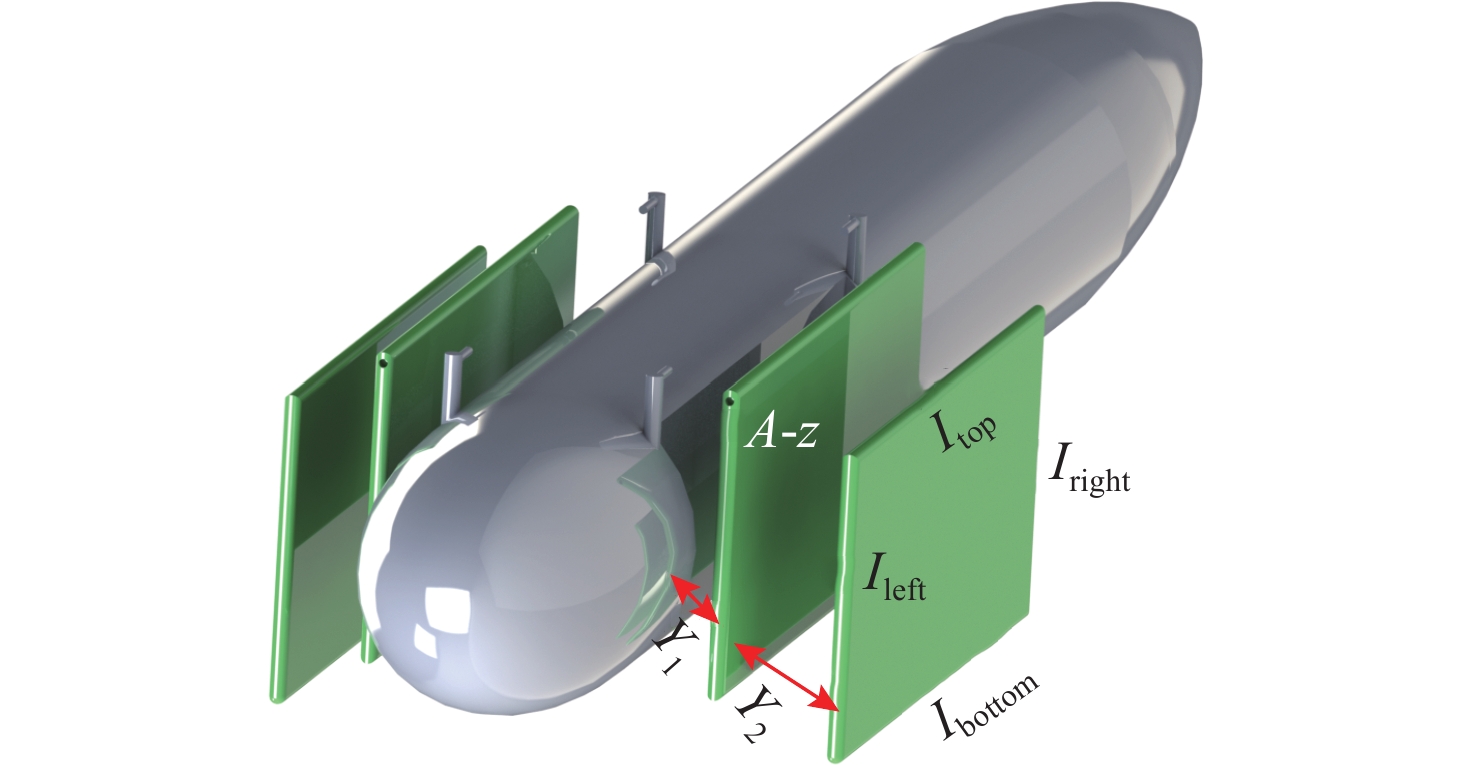
表 2 优化变量及范围
Table 2. Optimize variables and ranges
变量名称 含义 范围 A-z/mm A点的z坐标 150~190 Y1/mm 紧挨艇体的太阳能翼板与艇体的间隙 0~10 Y2/mm 2块太阳能翼板的间隙 0~10 Itop 顶部圆角因子 0~2 Ibottom 底部圆角因子 0~2 Ileft 左端圆角因子 0~2 Iright 右端圆角因子 0~2
下载: 导出CSV
表 3 优化前后变量取值对比
Table 3. Comparison of variable values before and after optimization
变量名称 初始值 优化值 A-z/mm 160 173.99 Y1/mm 5 5.95 Y2/mm 5 1.93 Itop 0 0.92 Ibottom 0 0.92 Ileft 0 1.77 Iright 0 0.04 总阻力/N 47.04 34.14
下载: 导出CSV
-
[1] SAHOO A, DWIVEDY S K, ROBI P S. Advancements in the field of autonomous underwater vehicle[J]. Ocean Engineering, 2019, 181: 145-160. doi: 10.1016/j.oceaneng.2019.04.011 [2] WANG X, WANG Y, WANG P, et al. Sailing efficiency optimization and experimental validation of a Petrel long-range autonomous underwater vehicle[J]. Ocean Engineering, 2023, 281: 114604. doi: 10.1016/j.oceaneng.2023.114604 [3] HOU S, ZHANG Z, LIAN H, et al. Hull shape optimization of small underwater vehicle based on Kriging-based response surface method and multi-objective optimization algorithm[J]. Brodogradnja, 2022, 73(3): 111-134. doi: 10.21278/brod73307 [4] SUN S, LUO W. Multidisciplinary design optimization of underwater vehicles based on a combined proxy model[J]. Journal of Marine Science and Engineering, 2024, 12(7): 1087. doi: 10.3390/jmse12071087 [5] CRIMMINS D M, PATTY C T, BELIARD M A, et al. Long-endurance test results of the solar-powered AUV system[C]//Oceans 2006. Boston, USA: IEEE, 2006: 1-5. [6] 施迅, 周悦, 吴诗昊, 等. 三体模块化渔业监测AUV结构设计及外形优化[J]. 上海海洋大学学报, 2024, 33(6): 1429-1438.SHI X, ZHOU Y, WU S H, et al. Structure design and shape optimization of three-body modular fishery monitoring AUV[J]. Journal of Shanghai Ocean University, 2019, 33(6): 1429-1438. [7] CHEN S, FENG L. Multi-objective shape optimization of underwater vehicles based on an adaptive sampling algorithm[J]. Applied Ocean Research, 2024, 146: 103950. doi: 10.1016/j.apor.2024.103950 [8] WEN Q B, FENG R, AN X, et al. Optimal design of an autonomous underwater helicopter’s shape based on combinatorial optimization strategy[J]. Ocean Engineering, 2022, 266: 113015. doi: 10.1016/j.oceaneng.2022.113015 [9] WANG G B, WANG Y H, YANG M, et al. Design and motion performance of a novel variable-area tail for underwater gliders[J]. IEEE/ASME Transactions on Mechatronics, 2025, 30(3): 2132-2143. [10] 凌宏杰, 王志东, 张贝, 等. 基于组合优化算法的翼身融合水下滑翔机优化研究[J]. 西北工业大学学报, 2022, 40(5): 1125-1132.LING H J, WANG Z D, ZHANG B, et al. Research on optimization of wing-body fusion underwater glider based on combinatorial optimization algorithm[J]. Journal of Northwestern Polytechnical University, 2022, 40(5): 1125-1132. [11] HENKES R, HOOGENDOORN C. Numerical determination of wall functions for the turbulent natural-convection boundary-layer[J]. International Journal of Heat and Mass Transfer, 1990, 33(6): 1087-1097. doi: 10.1016/0017-9310(90)90242-M [12] KHARGHANI M, PASANDIDEHFARD M, NAEIMIRAD M. Turbulent transient boundary layer over a flat plate[J]. Ocean Engineering, 2022, 244: 110192. doi: 10.1016/j.oceaneng.2021.110192 [13] LIU H L, HUANG T T. Summary of DARPA suboff experimental program data[R]. West Bethesda: Naval Surface Warfare Center, Carderock Division, 1998. [14] 杨敬东, 赵登, 彭伟, 等. 基于CFD的游艇阻力预报及球鼻艏型线变形[J]. 重庆交通大学学报(自然科学版), 2023, 42(2): 144-148.YANG J D, ZHAO D, PENG W, et al. Yacht resistance prediction and bulbous bow profile deformation based on CFD[J]. Journal of Chongqing Jiaotong University(Natural Science Edition), 2023, 42(2): 144-148. [15] 刘悦. 基于智能优化方法船舶阻力性能优化设计研究[D]. 大连: 大连理工大学, 2021. [16] 陈骏喆, 姜栋, 张儒, 等. 小样本规模船型优化策略的选择研究[J]. 中国造船, 2023, 64(4): 248-257. doi: 10.3969/j.issn.1000-4882.2023.04.023CHEN J Z, JIANG D, ZHANG R, et al. Study on the selection of ship form optimization strategy with small sample size[J]. Shipbuilding in China, 2023, 64(4): 248-257. doi: 10.3969/j.issn.1000-4882.2023.04.023 [17] 孙海莎. 基于CFD的散货船首部型线优化[D]. 武汉: 华中科技大学, 2022. [18] PRAKS P, BRKIC D. Approximate flow friction factor: Estimation of the accuracy using Sobol’s Quasi-Random sampling[J]. Axioms, 2022, 11(2): 36. doi: 10.3390/axioms11020036 [19] ZHENG W, DOERR B. Mathematical runtime analysis for the non-dominated sorting genetic algorithm II(NSGA-II)[J]. Artificial Intelligence, 2023, 325: 104016. doi: 10.1016/j.artint.2023.104016 [20] 张帅. 长航程水下滑翔机的减阻技术研究[D]. 天津: 天津大学, 2018. [21] ŞUMNU A. Passive flow control of Ahmed body using control rod[J]. International Journal of Automotive and Mechanical Engineering, 2022, 19(4): 10063-10072. doi: 10.15282/ijame.19.4.2022.03.0777 [22] XIE Z, LIU Y, WANG S, et al. Bio-inspired profile improving the flow near the stern of an underwater vehicle[J]. Ocean Engineering, 2024, 314: 119693. doi: 10.1016/j.oceaneng.2024.119693 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 455
- HTML全文浏览量: 189
- PDF下载量: 84
- 被引次数: 0





