

Detection of Shipborne Charging Components and Docking of Shore-Based Manipulator Based on MobileNetV2
-
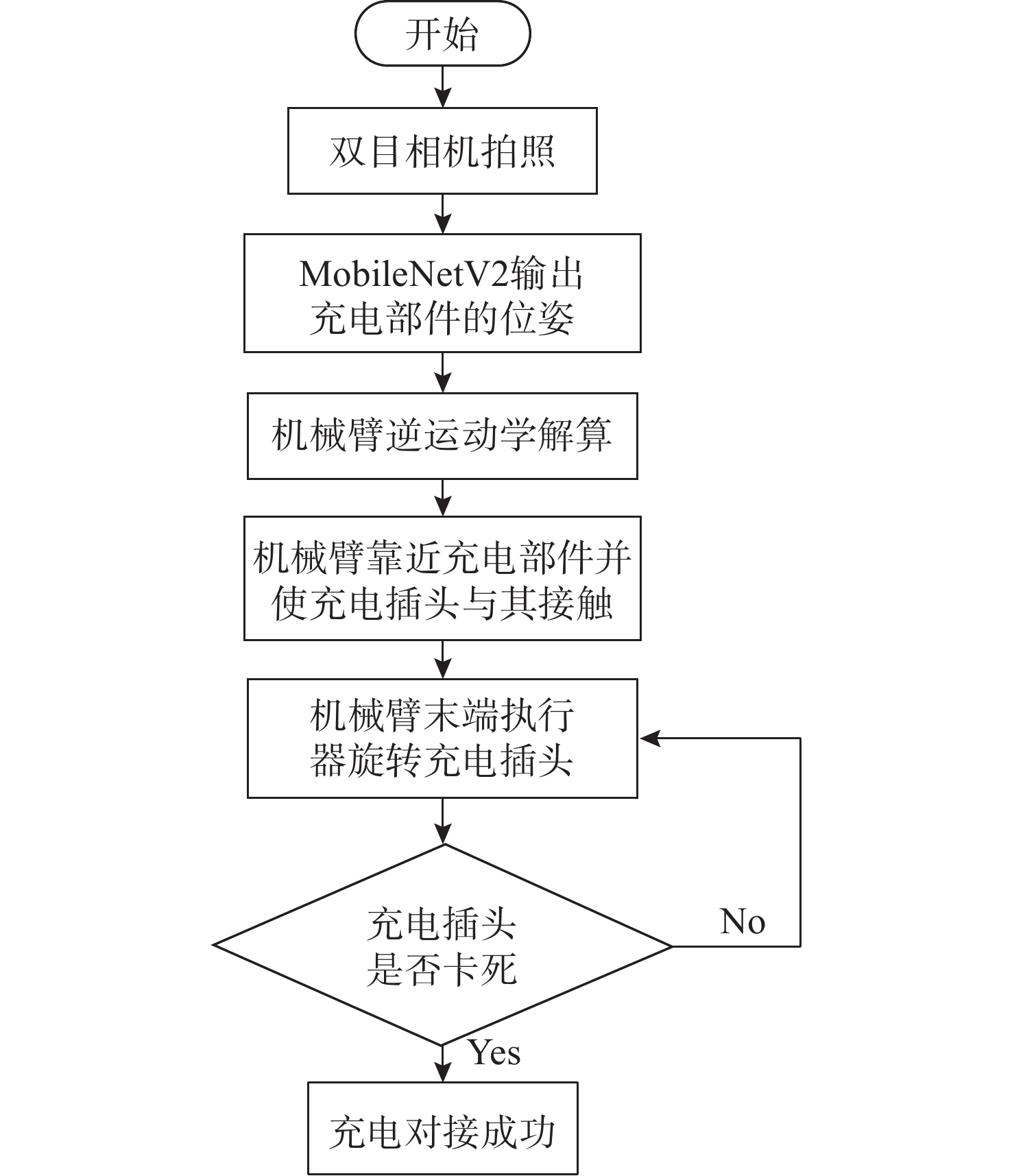
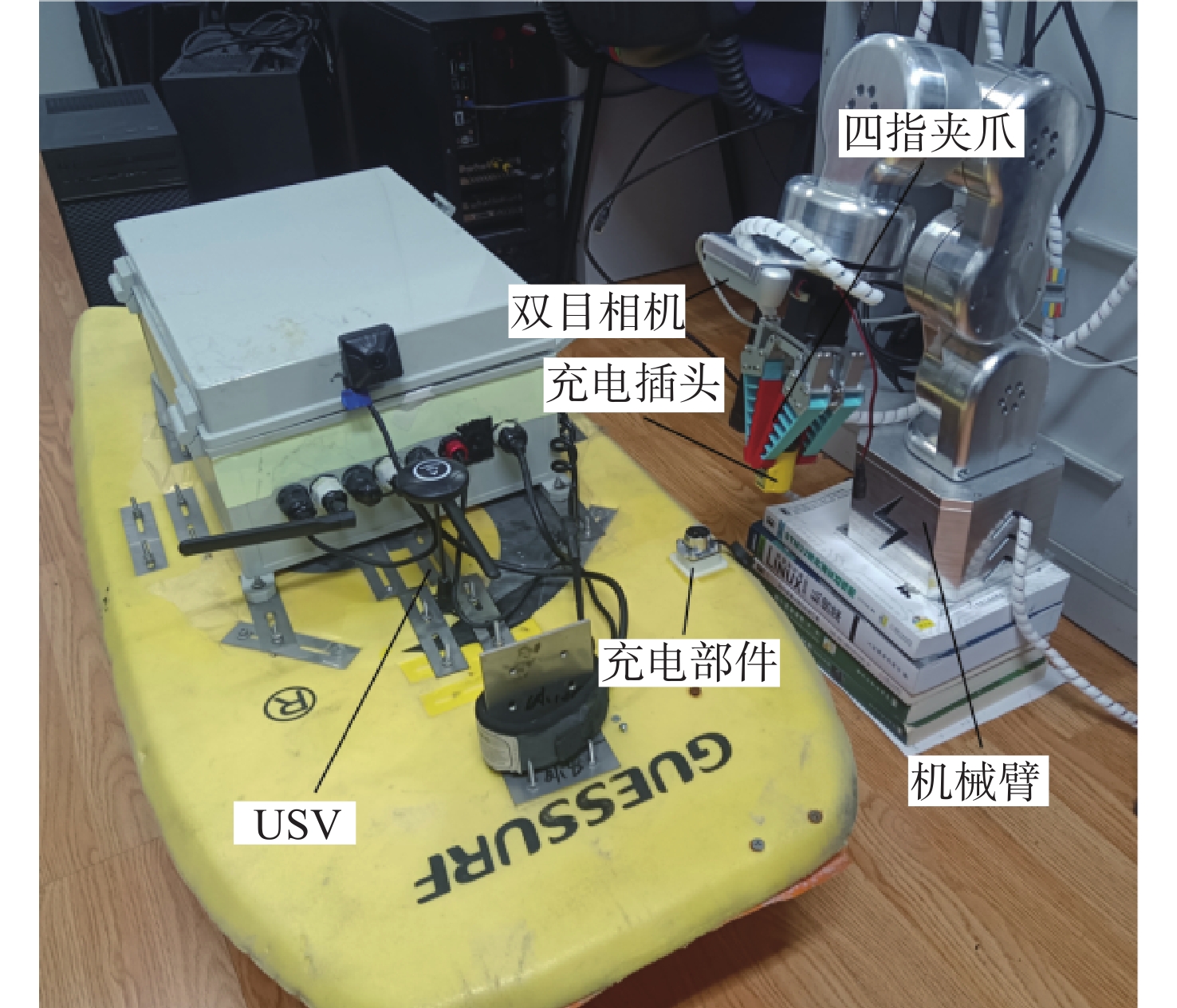
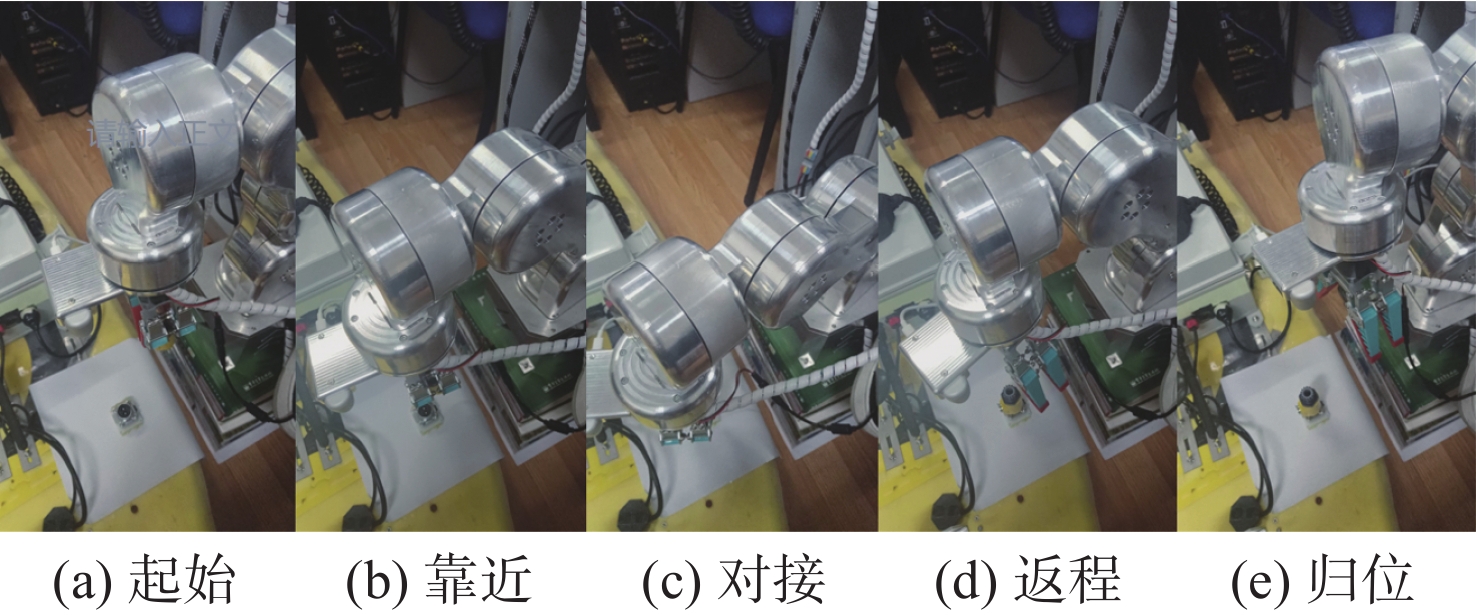
摘要: 为实现无人水面艇(USV)的自主充电, 提出了一种基于MobileNetV2的船载充电部件检测与岸基机械臂对接方法。首先通过双目相机D435i采集RGB图与深度图作为输入, 利用基于MobileNetV2的检测网络估计充电部件的位姿; 随后通过坐标变换计算充电部件在机械臂基座坐标系下的位姿, 驱动机械臂末端充电插头靠近充电部件, 实现初步对接; 再利用对接策略完成内部孔洞的搜索, 从而实现最终对接。在现实环境中搭建充电部件对接实验平台, 验证了该方法的有效性, 该方法能够准确识别出USV上的充电部件, 并采用基于重力补偿的比例-微分力矩控制策略控制机械臂完成充电插头与充电部件的对接, 为USV自主充电提供了新的思路。
-
关键词:
- 无人水面艇 /
- MobileNetV2 /
- 机械臂 /
- 对接策略
Abstract: To realize the autonomous charging of unmanned surface vessels(USVs), a method based on MobileNetV2 was proposed for the detection of shipborne charging components and the docking of shore-based manipulators. Firstly, binocular camera D435i was employed to collect RGB and depth maps as inputs and MobileNetV2-based detection network was utilized to estimate the position and attitude of charging components. Then, the position and attitude of the charging components in the coordinate system of the manipulator base were calculated by coordinate transformation. Subsequently, the charging plug at the end of the manipulator was driven close to the charging component to achieve a preliminary docking. Finally, the docking strategy was adopted to search for the internal holes for final docking. In this study, an experimental platform for docking charging components was built in a real environment to verify the effectiveness of the proposed method. The charging components of USVs could be accurately identified by this method. Besides, the manipulator completed the docking of the charging plug and the charging components under the control of the proportional-differential torque control strategy based on gravity compensation, providing a new idea for the autonomous charging of USVs.-
Key words:
- unmanned surface vessel /
- MobileNetV2 /
- manipulator /
- docking strategy
-
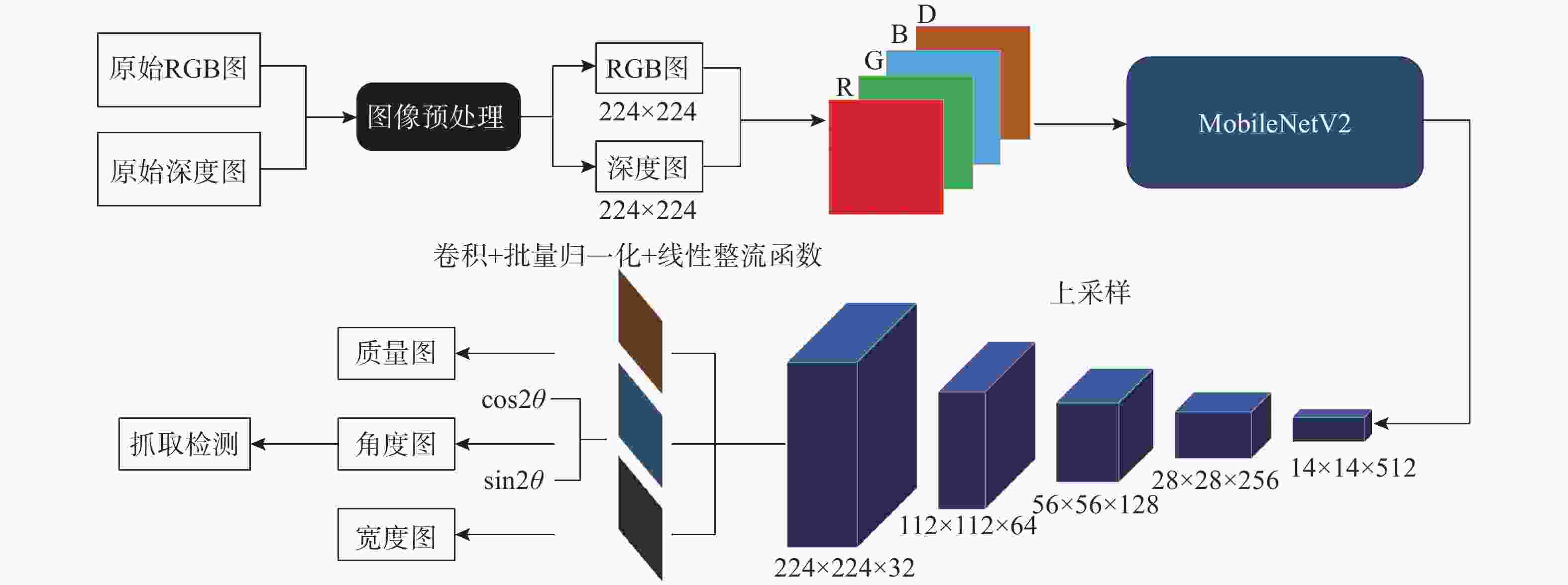
图 1 基于MobileNetV2的抓取检测模型结构
Figure 1. Grasping detection model structure based on MobileNetV2
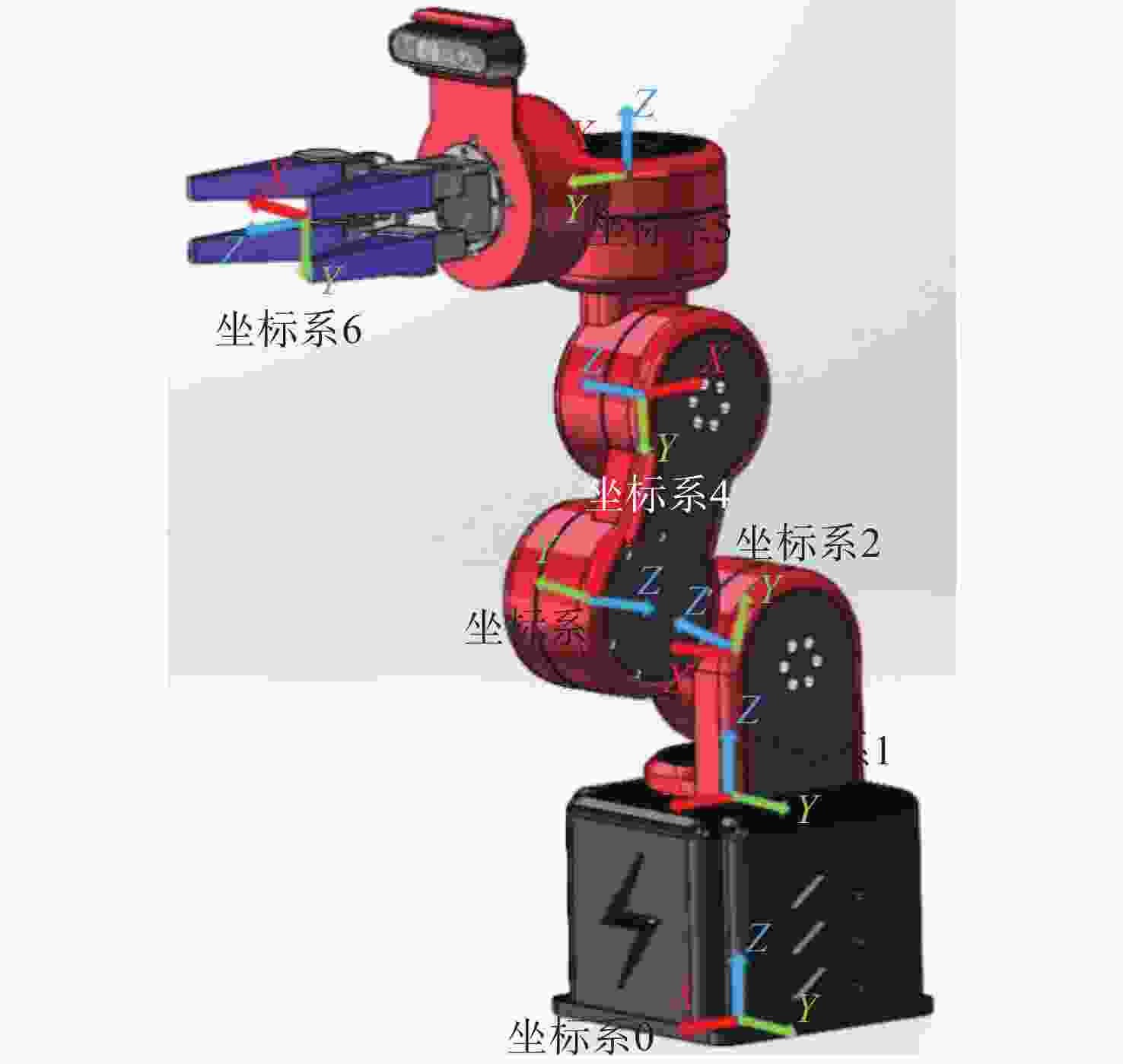
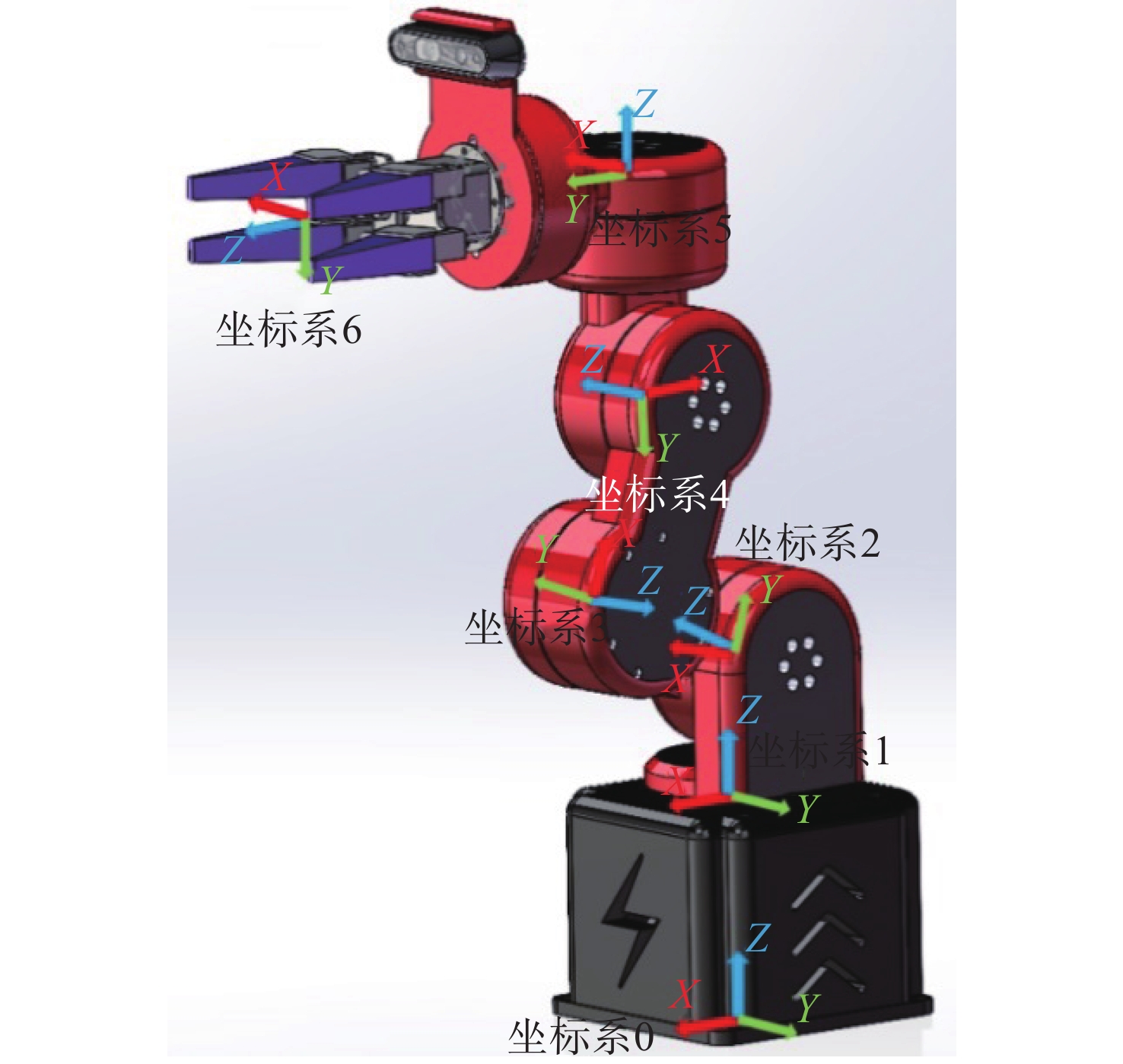
图 3 机械臂D-H连杆坐标系示意图
Figure 3. Schematic diagram of the D-H coordinate system of the manipulator
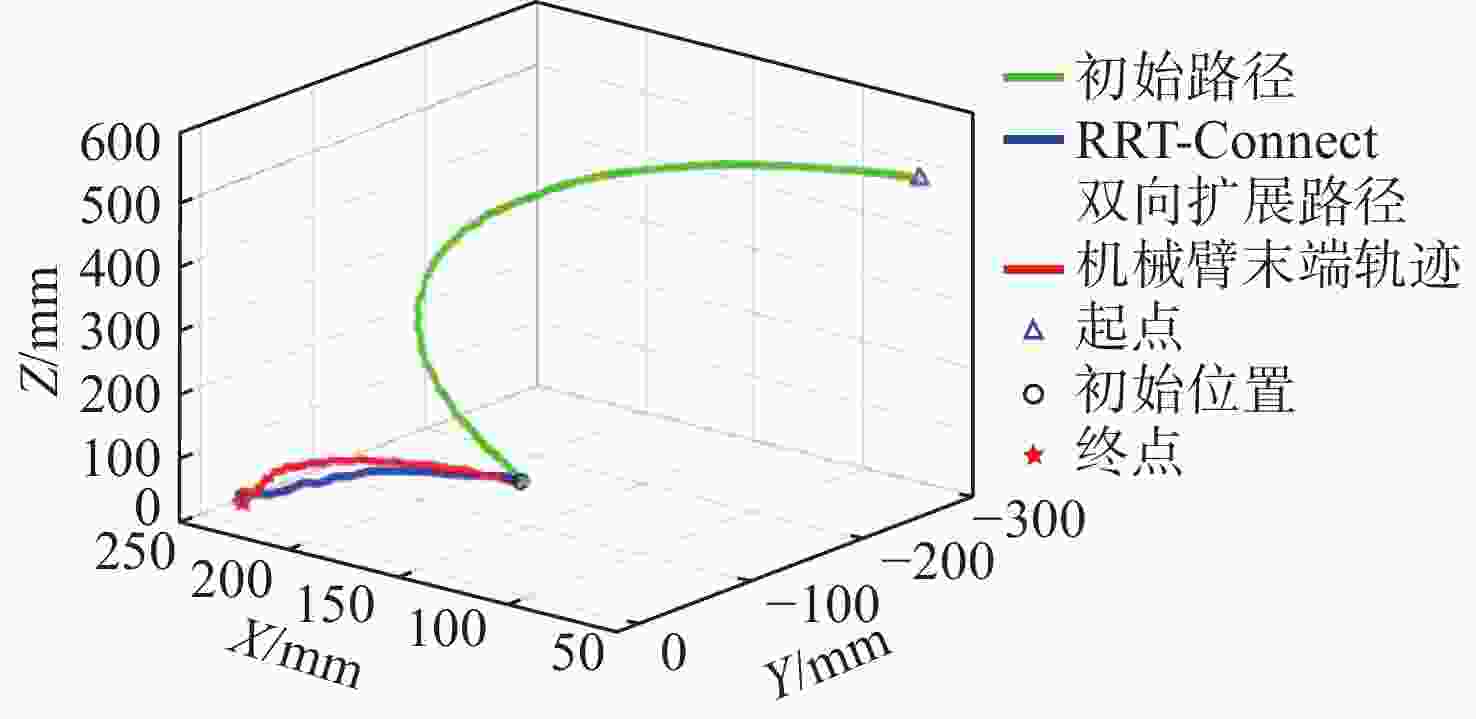
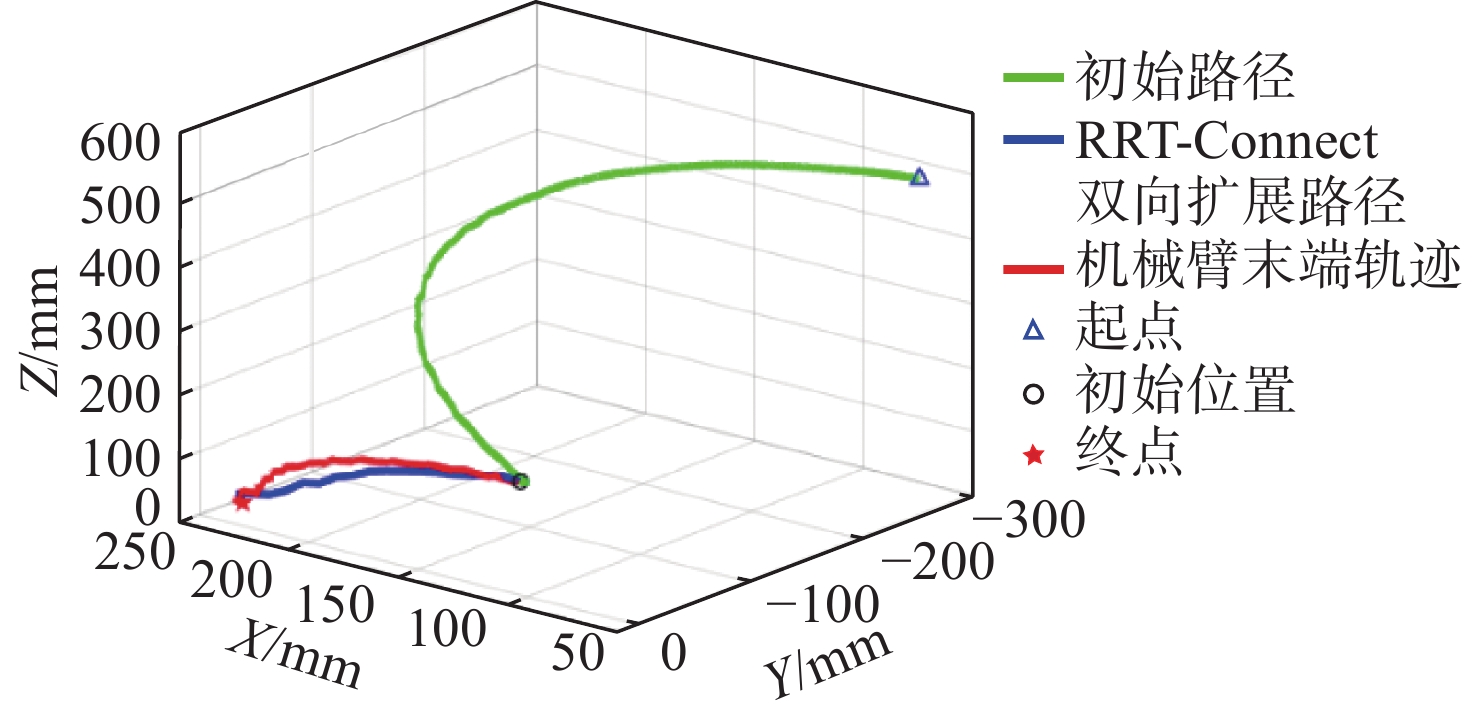
图 8 基于RRT-Connect算法的路径规划曲线
Figure 8. Path planning curve based on RRT-Connect algorithm
表 1 不同模型实验结果对比
Table 1. Comparison of experimental results of different models
模型 准确率/% 精确率/% 召回率/% 综合指标/% LeNet 77.64 78.88 76.08 76.47 AlexNet 83.96 83.98 83.85 83.89 ShuffleNetV2 89.97 90.30 89.90 89.89 MobileNetV2 92.92 92.79 92.60 92.68  下载: 导出CSV
下载: 导出CSV
-
[1] HSU C C, HUANG S W, HUANG H Y, et al. A guidance method for a small unmanned surface vehicle wireless charging[C]//OCEANS 2024-Singapore. Singapore: IEEE, 2024: 1-5. [2] HU J, HE B, XING Z, et al. Design of a docking & charging device for unmanned surface vehicle(USV)[C]//2023 IEEE 2nd International Conference on Electrical Engineering, Big Data and Algorithms(EEBDA). Changchun, China: IEEE, 2023: 915-920. [3] XUE K, REN C, JI X, et al. Design, modeling and implementation of a projectile-based mechanism for USVs charging tasks[J]. IEEE Robotics and Automation Letters, 2022, 8(1): 288-295. [4] PHAMDUY P, CHEONG J, PORFIRI M. An autonomous charging system for a robotic fish[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(6): 2953-2963. doi: 10.1109/TMECH.2016.2582205 [5] 曹宇, 宋育泽, 唐小波, 等. BDS在电动船智能充电装置中的应用[J]. 全球定位系统, 2021, 46(5): 73-78. doi: 10.12265/j.gnss.2021033101CAO Y, SONG Y Z, TANG X B, et al. Application of BDS in intelligent charging device of electric boat[J]. Global Positioning System, 2021, 46(5): 73-78. doi: 10.12265/j.gnss.2021033101 [6] MOHSAN S A H, OTHMAN N Q H, KHAN M A, et al. A comprehensive review of micro UAV charging techniques[J]. Micromachines, 2022, 13(6): 977. doi: 10.3390/mi13060977 [7] BIN JUNAID A, KONOIKO A, ZWEIRI Y, et al. Autonomous wireless self-charging for multi-rotor unmanned aerial vehicles[J]. Energies, 2017, 10(6): 803. doi: 10.3390/en10060803 [8] ZHOU Y, HE Y, YAN Y, et al. Autonomous charging docking control method for unmanned vehicles based on vision and infrared[J]. Journal of Physics: Conference Series, 2023, 2584(1): 012065. doi: 10.1088/1742-6596/2584/1/012065 [9] REN S, HE K, GIRSHICK R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016, 39(6): 1137-1149. [10] JIANG P, ERGU D, LIU F, et al. A review of Yolo algorithm developments[J]. Procedia Computer Science, 2022, 199: 1066-1073. doi: 10.1016/j.procs.2022.01.135 [11] SANDLER M, HOWARD A, ZHU M, et al. Mobilenetv2: Inverted residuals and linear bottlenecks[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Salt Lake City, UT, USA: IEEE, 2018: 4510-4520. [12] GULZAR Y. Fruit image classification model based on MobileNetV2 with deep transfer learning technique[J]. Sustainability, 2023, 15(3): 1906. doi: 10.3390/su15031906 [13] DONG K, ZHOU C, RUAN Y, et al. MobileNetV2 model for image classification[C]//2020 2nd International Conference on Information Technology and Computer Application (ITCA). Guangzhou, China: IEEE, 2020: 476-480. [14] 杨国亮, 李放, 朱晨, 等. 改进MobileNetV2网络在遥感影像场景分类中的应用[J]. 遥感信息, 2020, 35(1): 1-8.YANG G L, LI F, ZHU C, et al. Application of improved MobileNetV2 network in remote sensing image scene classification[J]. Remote Sensing Information, 2019, 35(1): 1-8. [15] 何源福, 夏毅敏, 龙斌, 等. TBM钢拱架拼接机械手抓取对接机构[J]. 浙江大学学报(工学版), 2020, 54(11): 2204-2213.HE Y F, XIA Y M, LONG B, et al. TBM steel arch splicing manipulator grasping joint mechanism[J]. Journal of Zhejiang University(Engineering and Technology Edition), 2020, 54(11): 2204-2213. [16] SHAH H N M, SULAIMAN M, SHUKOR A Z, et al. An experiment of detection and localization in tooth saw shape for butt joint using KUKA welding robot[J]. The International Journal of Advanced Manufacturing Technology, 2018, 97: 3153-3162. doi: 10.1007/s00170-018-2092-9 [17] CHENG X, ZHOU J M, ZHOU Z, et al. An improved RRT-Connect path planning algorithm of robotic arm for automatic sampling of exhaust emission detection in Industry 4.0[J]. Journal of Industrial Information Integration, 2023, 33: 100436. [18] PERRUSQUIA A, CAMPOS F A J, SANMIGUEL T R C. A novel tuning method of PD with gravity compensation controller for robot manipulators[J]. IEEE Access, 2020, 8: 114773-114783. [19] NIU S, ZHAO Q, CHEN H, et al. Underwater wireless charging system of unmanned surface vehicles with high power, large misalignment tolerance and light weight: Analysis, design and optimization[J]. Energies, 2022, 15(24): 9529. doi: 10.3390/en15249529 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 369
- HTML全文浏览量: 203
- PDF下载量: 71
- 被引次数: 0





