Application of State Estimation Algorithm for Autonomous Underwater Docking of UUVs
-
摘要: 无人水下航行器(UUV)水下自主动态对接是实现其远航程协同作业的关键技术之一。针对UUV水下动态对接中对对接装置运动状态估计精度不足的问题, 提出采用交互多模型(IMM)-自适应无迹卡尔曼滤波(AUKF)算法进行运动状态估计。考虑到UUV自身传感器获取的对接装置运动状态量测误差较大, 建立了UUV非线性观测模型, 采用AUKF算法在线实时更新观测噪声以降低观测误差; 针对单运动模型难以准确描述UUV和对接装置相对运动的问题, 构建了UUV与对接装置相对运动模型集, 采用IMM算法优化相对运动描述以提高滤波精度。基于UUV对接试验数据, 对比了无迹卡尔曼滤波(UKF)、AUKF和IMM-AUKF算法对对接装置运动状态的估计结果, 结果表明, IMM-AUKF算法具有更高的估计精度和稳定性, 可满足水下动态对接需求, 提升UUV对接成功率。Abstract: Underwater autonomous dynamic docking of unmanned undersea vehicle(UUV) is one of the key technologies for their long-range cooperative operations. In view of the insufficient estimation accuracy of the motion state of the docking device during underwater dynamic docking of UUVs, an interacting multiple model adaptive unscented Kalman filter(IMM-AUKF) algorithm was proposed to estimate the motion state. By considering the large measurement error of the motion state of the docking device obtained by the UUVs’ own sensor, the UUV nonlinear observation model was established, and the adaptive unscented Kalman filter(AUKF) algorithm was used to update the observation noise in real time and reduce observation errors. To accurately describe the relative motion between UUVs and the docking device with a single motion model, the relative motion model set of UUVs and the docking device was established, and the IMM was used to describe the motion state and improve the filtering accuracy. Based on UUV docking test data, the estimation results of the motion state of the docking device by the UKF, AUKF, and IMM-AUKF algorithms were compared. The results show that the accuracy and stability of the IMM-AUKF algorithm are better than the other two algorithms. It can meet the requirements of underwater dynamic docking and improve the success rate of UUV docking.
-
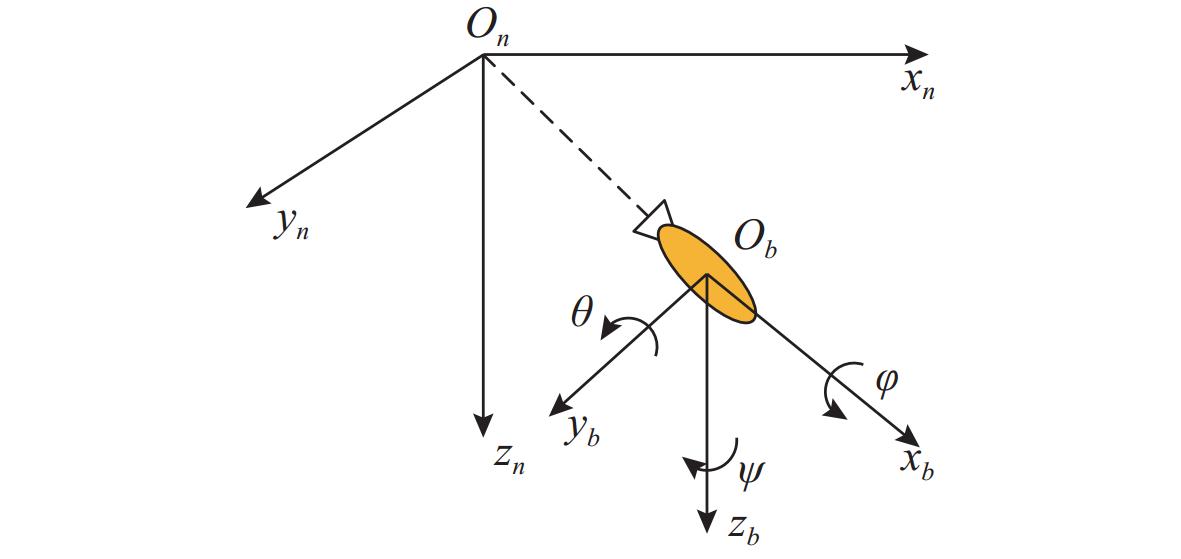
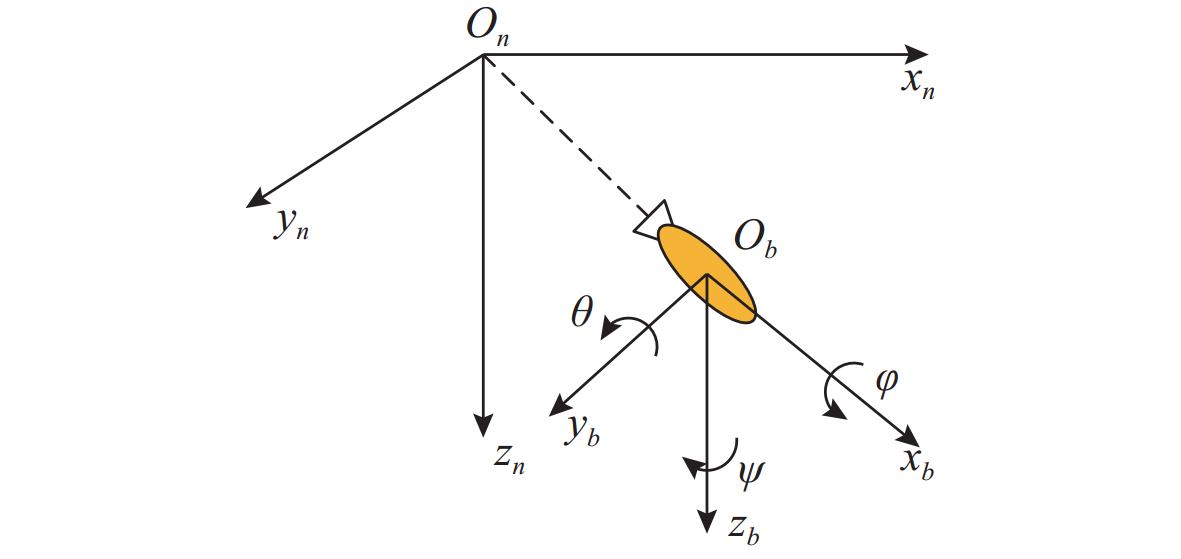
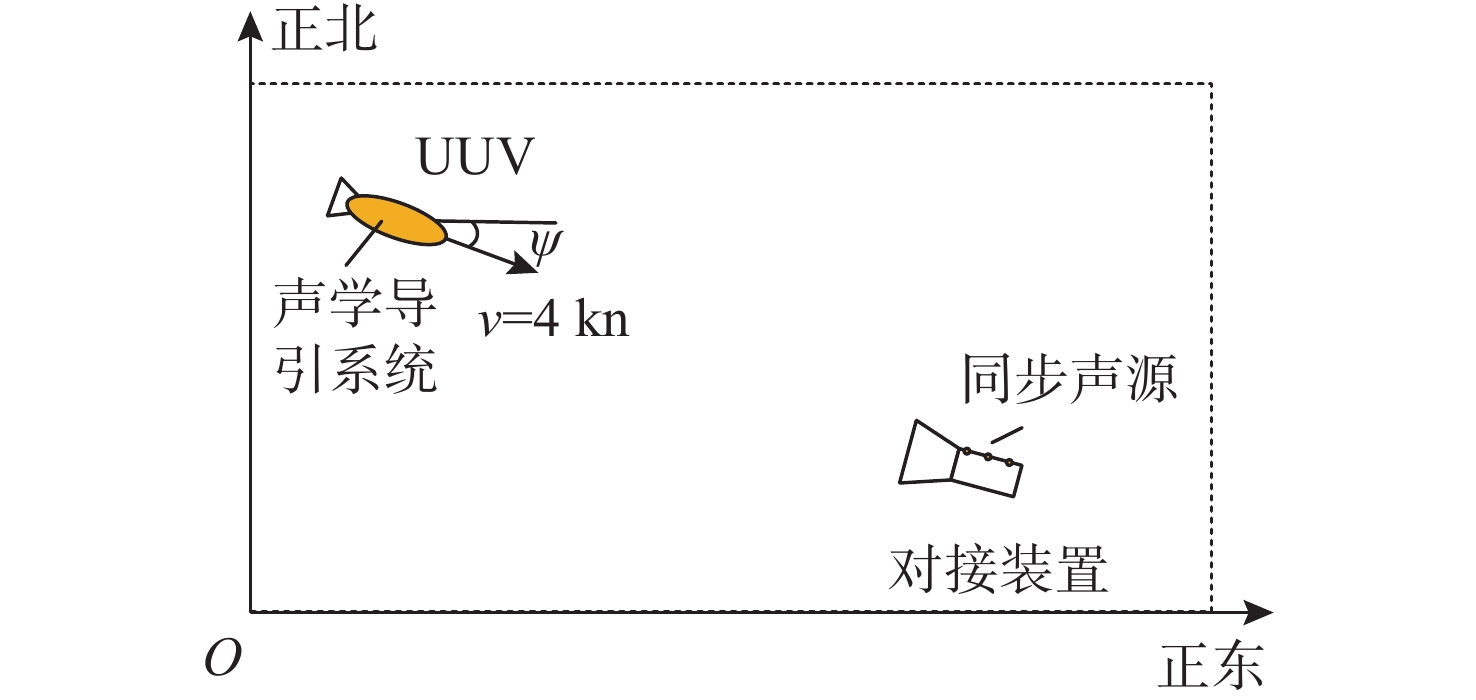
图 2 NED参考坐标系和运载体坐标系相对位置
Figure 2. Relative position between NED coordinate system and carrier coordinate system
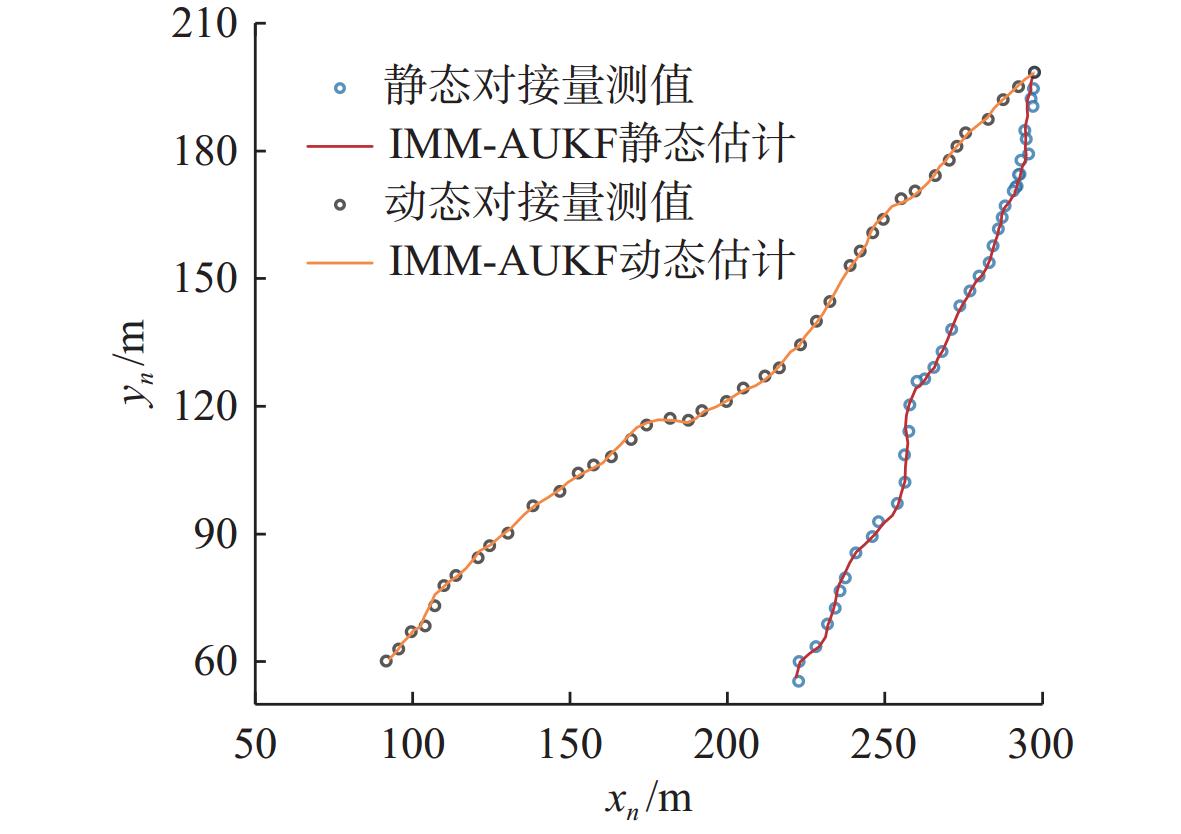
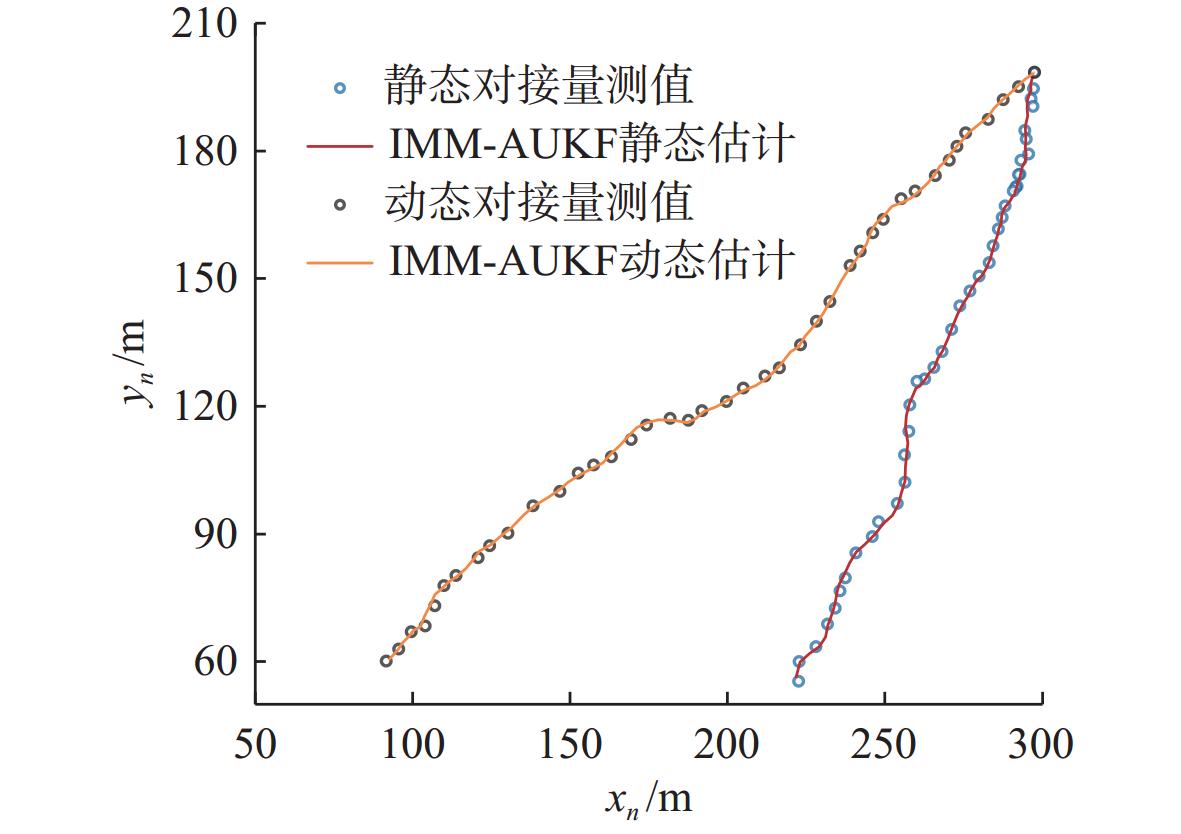
图 6 动态与静态对接相对运动轨迹对比
Figure 6. Comparison of relative motion trajectories between dynamic and static docking
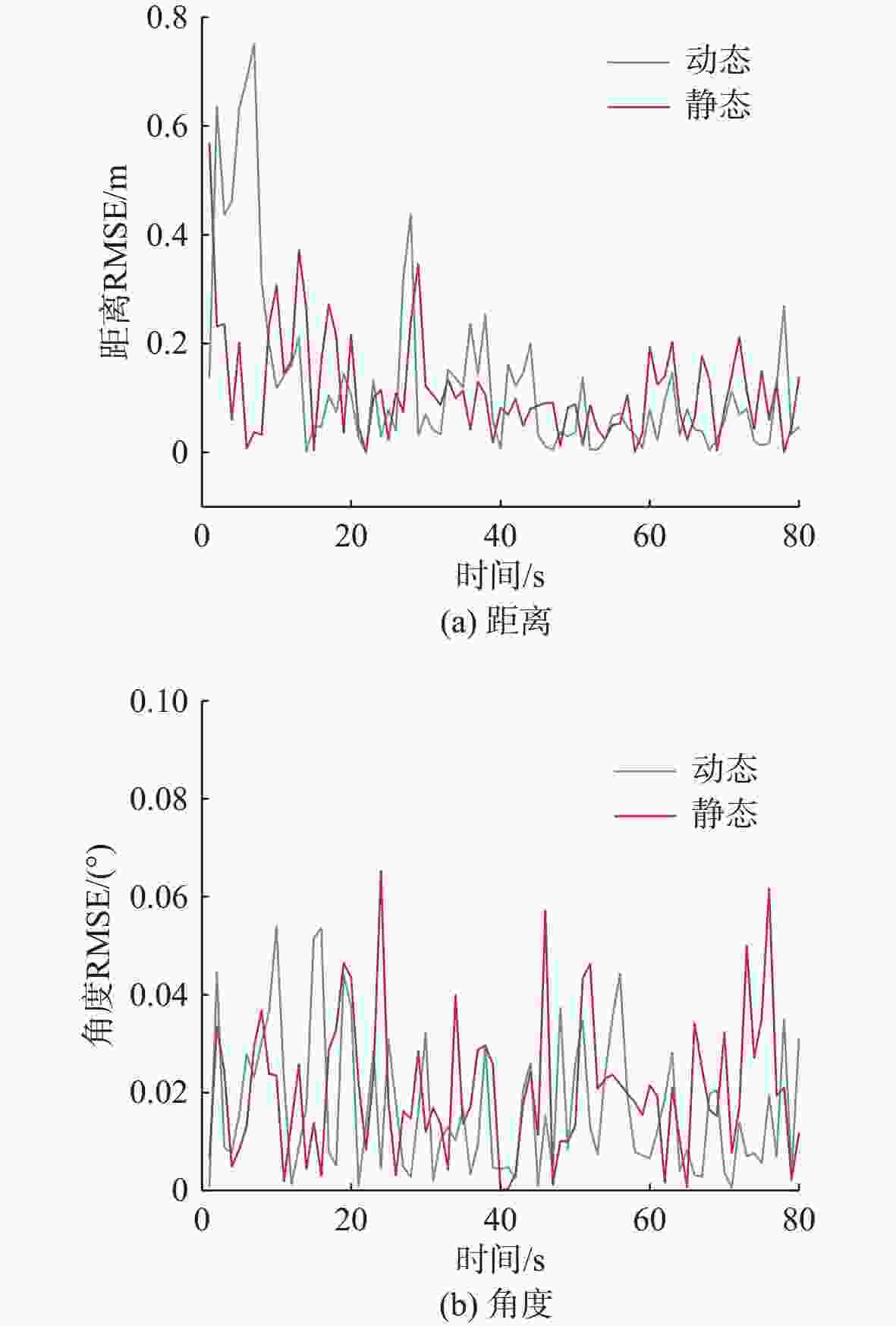
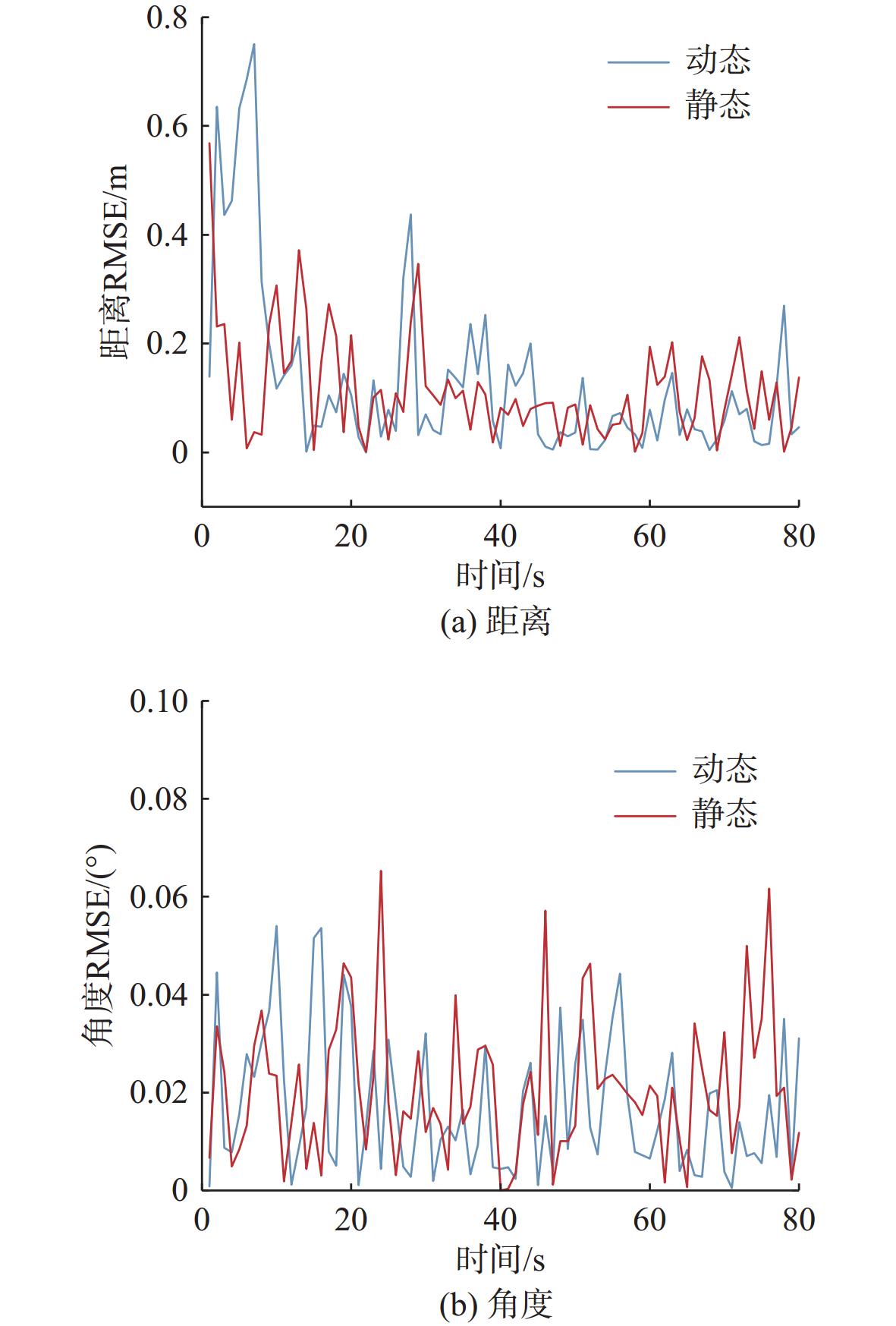
图 7 动态与静态对接状态估计RMSE对比
Figure 7. Comparison of RMSE between dynamic and static docking state estimation
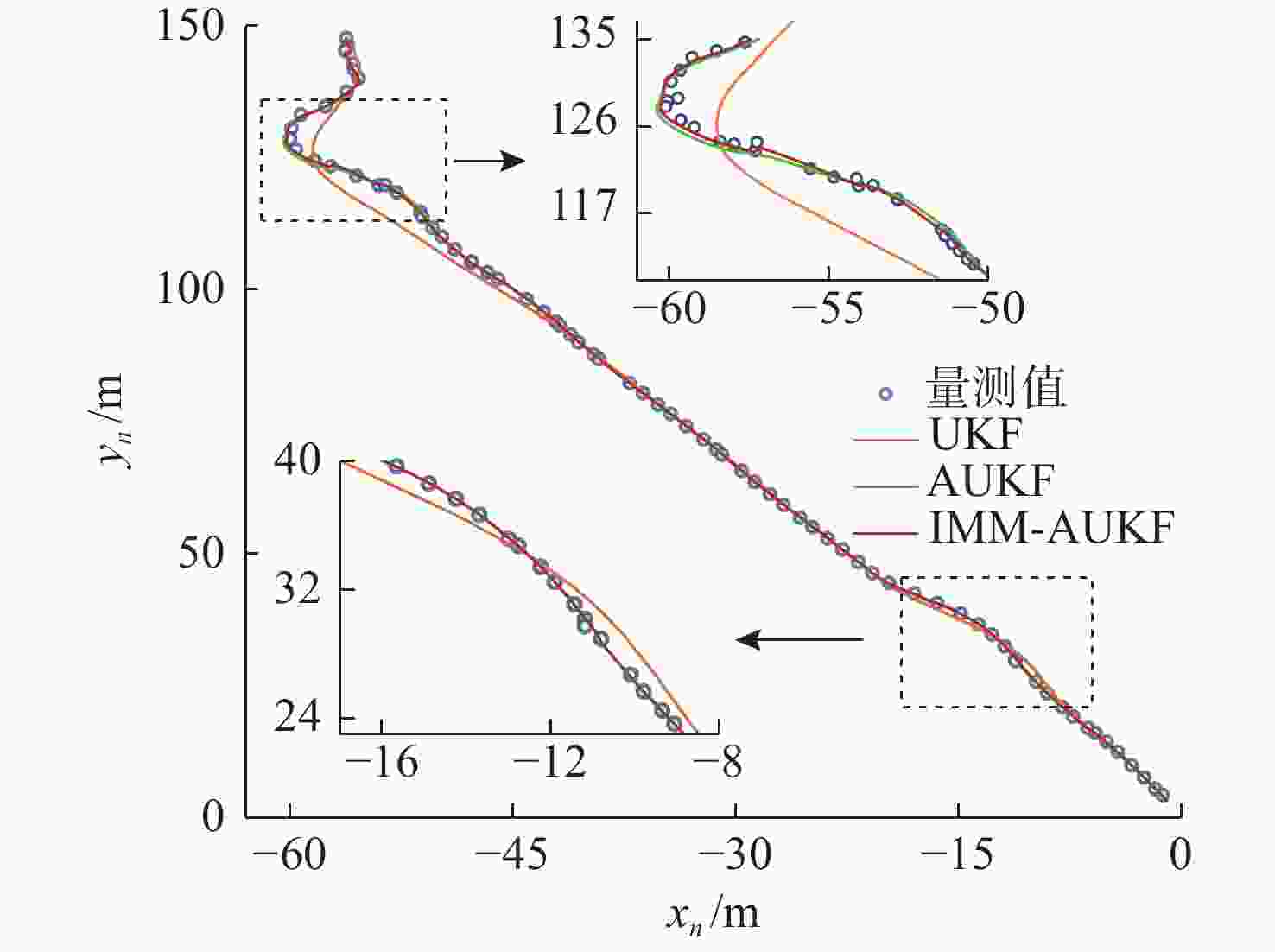
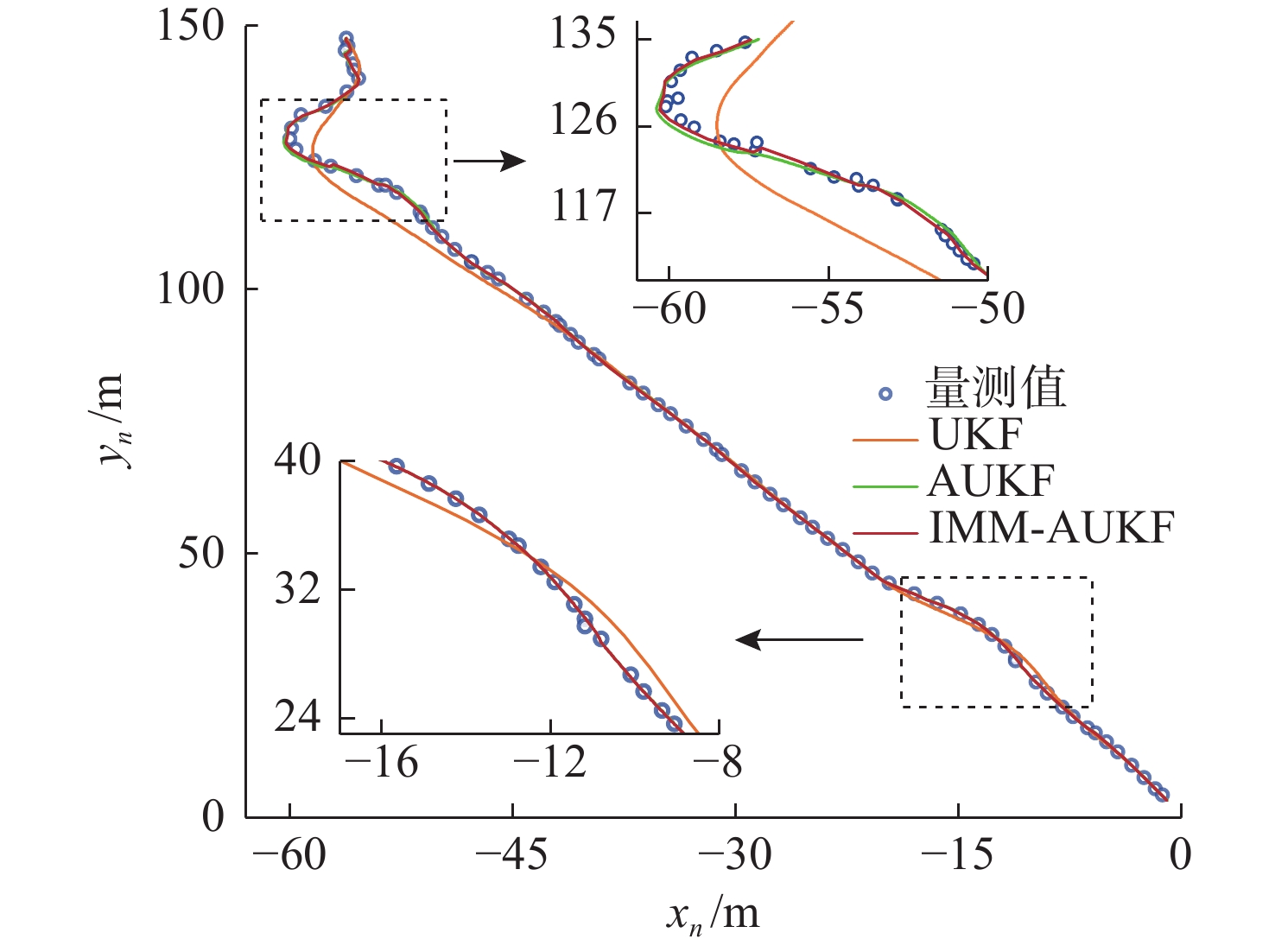
图 9 UUV与对接装置相对运动轨迹
Figure 9. The relative motion trajectory of the UUV and the docking device
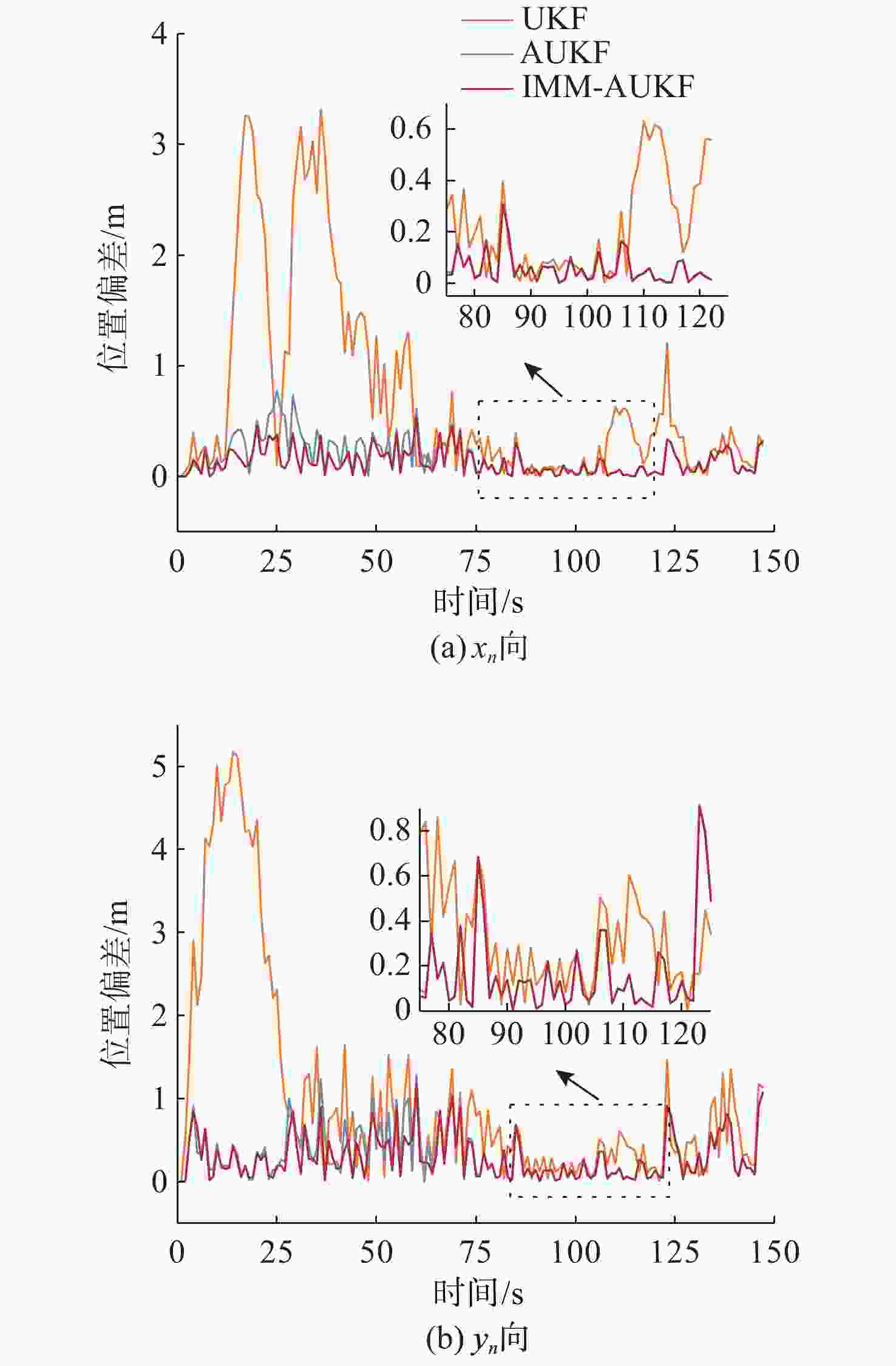
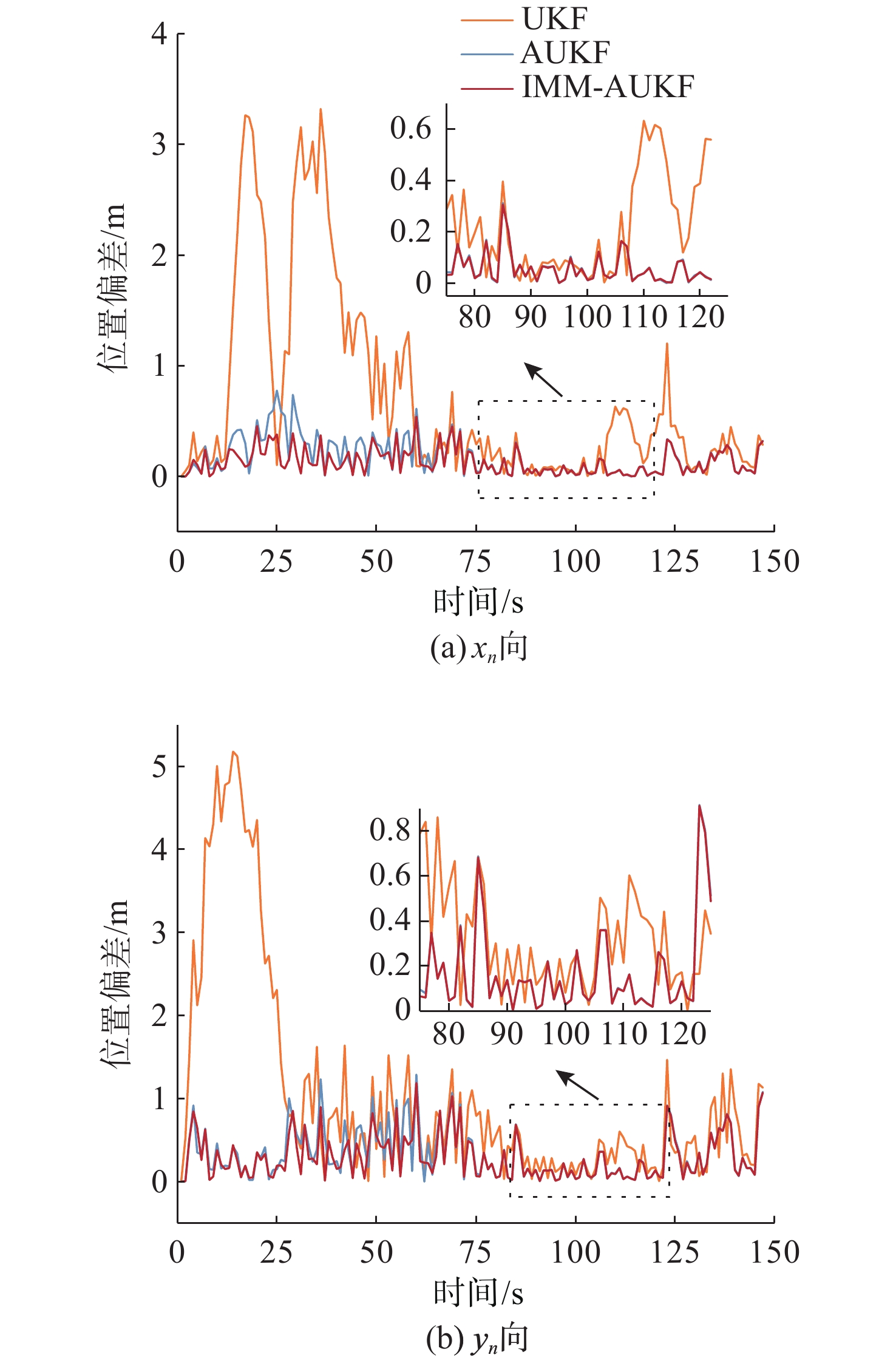
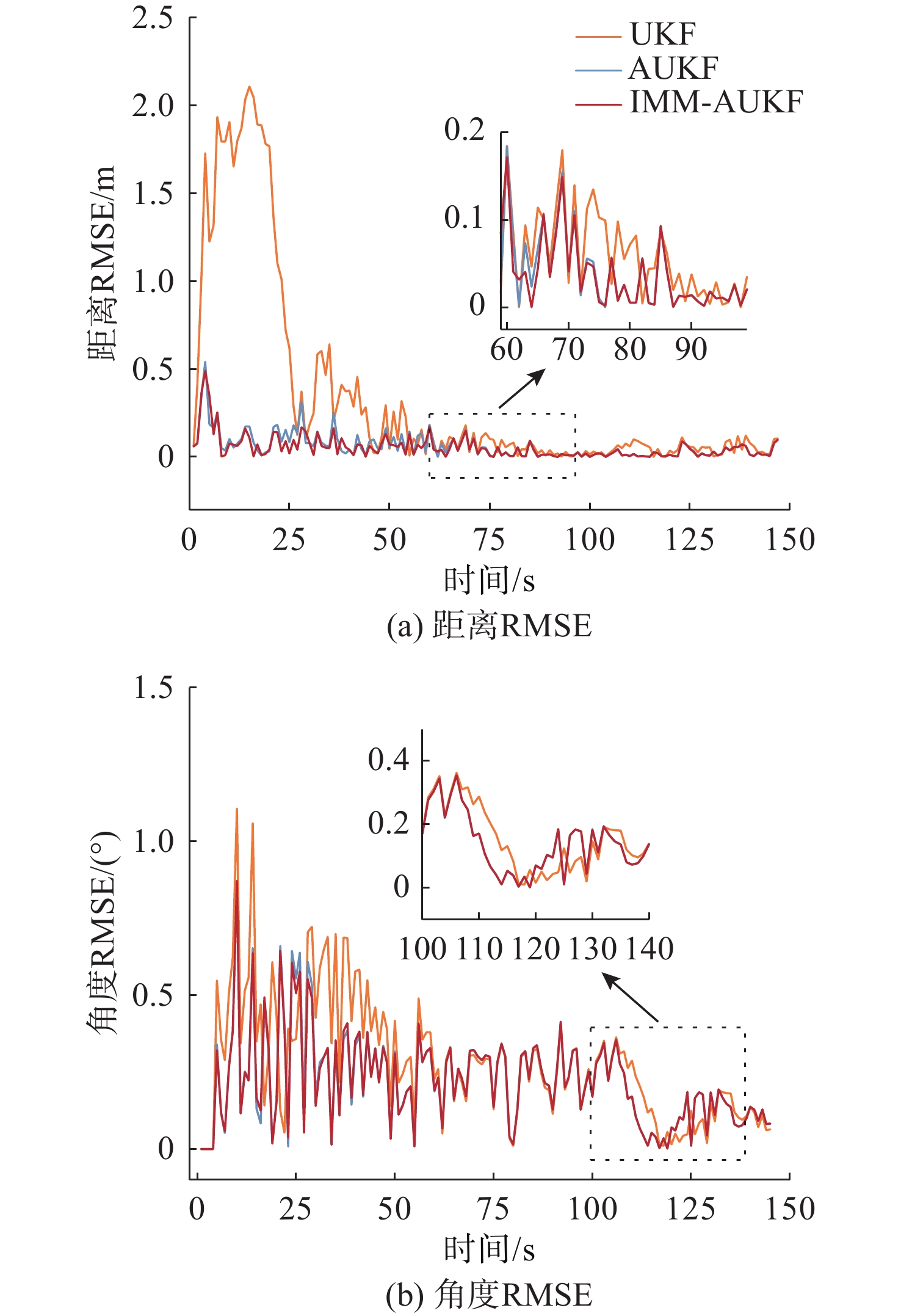
图 11 各算法状态估计位置偏差对比
Figure 11. Comparison of position biases in state estimation by different algorithms
表 1 动态与静态对接状态估计平均RMSE对比
Table 1. Comparison of average RMSE between dynamic and static docking state estimation
对接类型 平均RMSE 距离/m 角度/(°) 静态对接 0.109 7 0.016 9 动态对接 0.131 0 0.017 1  下载: 导出CSV
下载: 导出CSV
表 2 不同算法平均RMSE对比
Table 2. Comparison of average RMSE among different algorithms
算法类型 平均RMSE 距离/m 角度/(°) UKF 0.3187 0.2812 AUKF 0.0553 0.2218 IMM-AUKF 0.0470 0.2206
下载: 导出CSV
表 3 不同算法峰值RMSE对比
Table 3. Comparison of peak RMSE among different algorithms
算法类型 峰值RMSE 距离/m 角度/(°) UKF 2.106 1.106 AUKF 0.314 0.872 IMM-AUKF 0.350 0.872
下载: 导出CSV
-
[1] 侯海平, 付春龙, 赵楠, 等. 智能自主式水下航行器技术发展研究[J]. 舰船科学技术, 2022, 44(1): 86-90. doi: 10.3404/j.issn.1672-7649.2022.01.017 [2] 严恭敏, 邓瑀. 传统组合导航中的实用Kalman滤波技术评述[J]. 导航定位与授时, 2020, 7(2): 50-64. [3] 王银涛, 贾晓宝, 崔荣鑫, 等. 移动USBL测距辅助的UUV协同导航定位方法[J]. 控制理论与应用, 2022, 39(11): 2057-2064. doi: 10.7641/CTA.2022.11172 [4] 李杨, 杜度, 范世伟, 等. 基于M估计的多UUV协同定位算法[J]. 舰船科学技术, 2020, 42(7): 123-126. doi: 10.3404/j.issn.1672-7649.2020.04.024 [5] BAO L H, ZENG Q J, ZHU Z Y, et al. AUV docking recovery based on USBL integrated navigation method[C]//2019 Chinese Automation Congress(CAC). Hangzhou, China: CAC, 2019: 5804-5809. [6] LAN J, LI X R, MU C D. Best model augmentation for variable-structure multiple-model estimation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(3): 2008-2025. doi: 10.1109/TAES.2011.5937279 [7] 陈维义, 何凡, 刘国强, 等. 变结构交互式多模型滤波和平滑算法[J]. 系统工程与电子技术, 2023, 45(12): 4005-4012. [8] 许林漪. 基于多模型协作的对比学习样本构建[D]. 广州: 华南理工大学, 2023. [9] 李开飞. AUV水下对接关键技术及对接碰撞问题研究[D]. 哈尔滨: 哈尔滨工程大学, 2018. [10] 郑荣, 吕厚权, 于闯, 等. AUV与自主移动坞站对接的技术研究及系统设计实现[J]. 机器人, 2019, 41(6): 713-721.ZHENG R, LÜ H Q, YU C, et al. Technical research, system design and implementation of docking between AUV and autonomous mobile dock station[J]. ROBOT, 2019, 41(6): 713-721. [11] 李曾妮. 移动对接过程中的欠驱动AUV路径规划方法研究[D]. 杭州: 浙江大学, 2022. [12] 焦文龙. 欠驱动AUV机动目标跟踪控制研究[D]. 哈尔滨: 哈尔滨工程大学, 2019. [13] CHEN Y, YONG H, LI C Y, et al. Vehicle state estimation based on sage-husa adaptive unscented Kalman filtering[J]. World Electric Vehicle Journal, 2023, 14(7): 167-189. [14] 张常云. 自适应滤波方法研究[J]. 航空学报, 1998, 19(S1): 97-100. doi: 10.3321/j.issn:1000-6893.1998.Z1.021ZHANG C Y. Approach to adaptive filtering algorithm[J]. Acta Aeronautica et Astronautica Sinica, 1998, 19(S1): 97-100. doi: 10.3321/j.issn:1000-6893.1998.Z1.021 [15] 许红, 谢文冲, 袁华东, 等. 基于自适应的增广状态-交互式多模型的机动目标跟踪算法[J]. 电子与信息学报, 2020, 42(11): 2749-2755. doi: 10.11999/JEIT190516XU H, XIE W C, YUAN H D, et al. Maneuvering target tracking algorithm based on the adaptive augmented state interracting multiple model[J]. Journal of Electronics & Information Technology, 2020, 42(11): 2749-2755. doi: 10.11999/JEIT190516 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 404
- HTML全文浏览量: 161
- PDF下载量: 94
- 被引次数: 0