

Fuzzy Method-Based Sliding Mode Control for AUVs
-
摘要: 欠驱动自主水下航行器(AUV)具有模型高度非线性、被控变量强耦合且存在参数不确定等特点, 同时还受海洋环境中难以量测的扰动影响, 上述因素导致系统控制器的设计难度较大。另外, 现有成果大多采用AUV的简化模型或仅考虑某一维度的模型, 由于AUV被控变量强耦合, 因此所设计的控制器只适用于简化模型, 无法扩展到原始的非线性AUV系统。为解决上述问题, 文中针对欠驱动AUV系统, 设计了一种基于T-S模糊模型的自适应滑模控制器, 该控制器具有高通用性和强鲁棒性, 适用于复杂的AUV系统。首先, 采用T-S模糊建模方法对非线性、存在参数不确定的AUV系统进行线性化, 得到系统全局线性化模型。同时, 将系统内部不易获得精确值的参数项转化为系统不确定项, 得到其重构表达, 并将其分解以提高控制器参数求解自由度。其次, 考虑系统存在内部执行器故障及外部环境干扰的情况, 设计了自适应滑模控制器, 能够对未知参数进行估计, 从而自适应更新控制律以稳定系统。通过Lyapunov稳定性理论确保了闭环系统的稳定性以及系统状态可达性。最后, 通过仿真实验验证了文中所设计控制器的有效性。Abstract: Underactuated autonomous undersea vehicles(AUVs) exhibit characteristics of high nonlinearity, strong controlled variable coupling, and parameter uncertainties in their models. Meanwhile, they are also affected by unmeasurable disturbances in the marine environment, which makes it difficult to design the controller for AUVs. In addition, most existing results adopt simplified linear models of AUVs or only consider single-dimensional models. Since the strong coupling of controlled variables, the designed controllers are only suitable for simplified models and cannot be extended to the original nonlinear AUV systems. To solve the above problems, this paper proposed an adaptive sliding mode controller based on the T-S fuzzy method for underactuated AUV systems. The controller has high versatility and strong robustness and is suitable for complex AUV systems. Firstly, the T-S fuzzy modeling method was used to linearize the nonlinear AUV system with parameter uncertainties, and a global linearized model was obtained. Meanwhile, the parameters of the system that are difficult to obtain their precise values were transformed into uncertainties, and their reconstruction expressions were obtained. Moreover, it was decomposed to improve the degree of freedom of solving the controller parameters. Secondly, by considering the presence of internal actuator faults and external environmental disturbances, an adaptive sliding mode controller was designed, which could estimate unknown parameters and adaptively update the control law to stabilize the system. Finally, the stability and state reachability of the closed-loop system were ensured through the Lyapunov stability theory. Simulations verified the effectiveness of the designed controller.
-
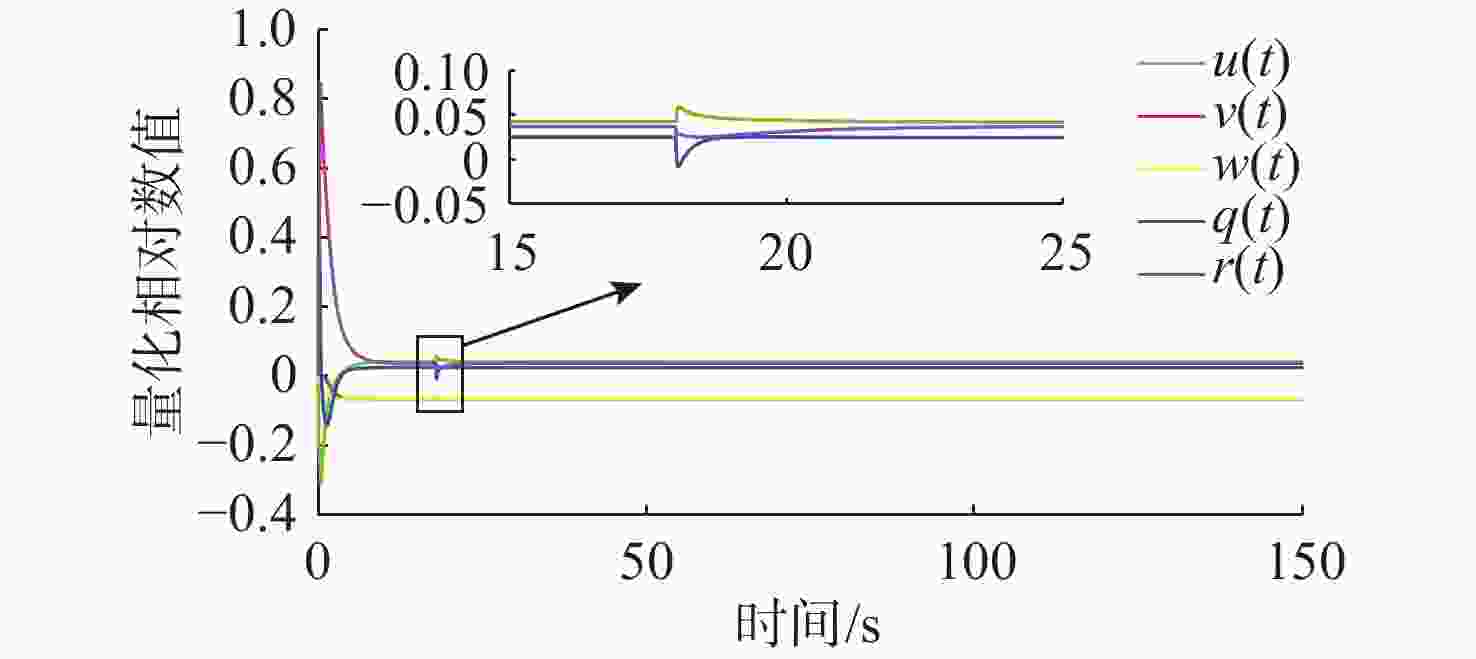
图 2 含外部扰动与故障时AUV速度轨迹
Figure 2. Velocity trajectories of AUV with external disturbances and faults
表 1 模型参数列表
Table 1. Model parameters of AUV
参数 符号 数值 质量/kg $ {m_i},\,i = 1,\, \cdots ,\,3$ ${m_1} = 31.41,\,{m_2} = 65.98,\,{m_3} = 65.98 $ 附加质量项1/kg ${m_i},\,i = 4,\,5 $ ${m_4} = 8.33,\,{m_5} = 8.33 $ 附加质量项2/(kg/s) ${I_i},\,I = X,\,Y,\,Z;i = u,\,v,\,w $ ${X_u} = 13.5,\,{Y_v} = 66.6,\,{Z_w} = 66.6 $ 附加质量项3/(kg·m2) ${I_i},\,I = M,\,N;i = q,\,r $ ${M_q} = 6.87,\,{N_r} = 6.87 $ 交叉阻尼项1/(kg/m) ${I_{i\left| i \right|}},\,I = X,\,Y,\, Z;i = u,\,v,\,w $ ${X_{u\left| u \right|}} = 3.9,\,{Y_{v\left| v \right|}} = 131,\,{Z_{w\left| w \right|}} = 131 $ 交叉阻尼项2/(kg/m2) ${I_{i\left| i \right|}},\,I = M,\,N;i = q,\,r $ ${M_{q\left| q \right|}} = 9.4,\,{N_{r\left| r \right|}} = 9.4 $ 浮力矩/(N·m) $ F_BG{_{\textit{z}}} $ $ F_BG{{_{\textit{z}}}}=6 $  下载: 导出CSV
下载: 导出CSV
-
[1] SAHOO A, DWIVEDY S K, ROBI P S. Advancements in the field of autonomous underwater vehicle[J]. Ocean Engineering, 2019, 181(1): 145-160. [2] 陈强. 水下无人航行器[M]. 北京: 国防科技出版社, 2013. [3] 黄琰, 李岩, 俞建成, 等. AUV 智能化现状与发展趋势[J]. 机器人, 2020, 42(2): 215-231.HUANG Y, LI Y, YU J C, et al. State-of-the-art and development trends of AUV intelligence[J]. Robot, 2020, 42(2): 215-231. [4] 王芳, 万磊, 李晔, 等. 欠驱动AUV的运动控制技术综述[J]. 中国造船, 2010, 51(2): 227-241.WANG F, WAN L, LI Y, et al. A survey on development of motion control for under actuated AUV[J]. Shipbuilding of China, 2010, 51(2): 227-241. [5] TRAN H N, PHAM T N N, CHOI S H. Robust depth control of a hybrid autonomous underwater vehicle with propeller torque’s effect and model uncertainty[J]. Ocean Engineering, 2021, 220: 108-117. [6] HERMAN P. Decoupled PD set-point controller for underwater vehicles[J]. Ocean Engineering, 2009, 36(6-7): 529-534. doi: 10.1016/j.oceaneng.2009.02.003 [7] SMALLWOOD D A, WHITCOMB L L. Model-based dynamic positioning of underwater robotic vehicles: theory and experiment[J]. IEEE Journal of Oceanic Engineering, 2004, 29(1): 169-186. doi: 10.1109/JOE.2003.823312 [8] BATISTA P, SILVESTRE C, OLIVEIRA P. A sensor-based controller for homing of underactuated AUVs[J]. IEEE Transactions on Robotics, 2009, 25(3): 701-716. doi: 10.1109/TRO.2009.2014496 [9] 徐健, 汪慢, 乔磊. 欠驱动无人水下航行器三维轨迹跟踪反步控制[J]. 控制理论与应用, 2014, 31(11): 1589-1596. [10] SHTESDDEL Y, EDWARDS C, FRIDMAN L, et al. Sliding mode control and observation[M]. New York: Springer, 2014. [11] YAN X G, SPURGEON S K, EDWARDS C. Variable structure control of complex systems: analysis and design[M]. Berlin: Springer, 2017. [12] REZAZADEGAN F, SHOJAEI K, SHEIKHOLESLAM F, et al. A novel approach to 6-DOF adaptive trajectory tracking control of an AUV in the presence of parameter uncertainties[J]. Ocean Engineering, 2015, 107: 246-258. doi: 10.1016/j.oceaneng.2015.07.040 [13] 李娟, 王佳奇, 丁福光. 基于反馈线性化的AUV三维轨迹跟踪滑模控制[J]. 哈尔滨工程大学学报, 2022, 43(3): 348-355.LI J, WANG J Q, DING F G. Sliding mode controller for three-dimensional trajectory tracking of AUV based on feedback linearization[J]. Journal of Harbin Engineering University, 2022, 43(3): 348-355. [14] 武建国, 陈凯, 陈武进, 等. 基于非线性干扰观测器的 AUV 量化反馈滑模控制[J]. 水下无人系统学报, 2021, 29(5): 556-564.WU J G, CHEN K, CHEN W J, et al. Quantized feedback sliding mode control for AUV based on nonlinear disturbance observer[J]. Journal of Unmanned Undersea Systems, 2021, 29(5): 556-564. [15] 赵旭, 龚时华, 杨进. 基于LMI的无人水下航行器干扰补偿控制[J]. 水下无人系统学报, 2020, 28(3): 271-277.ZHAO X, GONG S H, YANG J. Disturbance compensation control for unmanned undersea vehicle[J]. Journal of Unmanned Undersea Systems, 2020, 28(3): 271-277. [16] TAKAGI T, SUGENO M. Fuzzy identification of systems and its application to modeling and control[J]. IEEE Transactions on Systems, Man, and Cybernetics, 1985, 15(1): 116-132. [17] TANAKA K, WANG H O. Fuzzy control systems design and analysis: a linear matrix inequality approach[M]. New York: Wiley, 2001. [18] LI R C, YANG Y, Sliding mode observer based fault reconstruction for T-S fuzzy descriptor systems[J].IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(8): 5046-5055. [19] MANI P, JOO Y H. Fuzzy logic-based integral sliding mode control of multi-area power systems integrated with wind farms[J]. Information Sciences, 2021, 545: 153-169. [20] PETERSEN I R. A stabilization algorithm for a class of uncertain linear systems[J]. Systems & Control Letters, 1987, 8(4): 351-357. -

 下载:
下载:






 点击查看大图
点击查看大图
计量
- 文章访问数: 638
- HTML全文浏览量: 394
- PDF下载量: 93
- 被引次数: 0

图(6) / 表(1)




