Airfoil Preference and Adjustable Camber Impact Analysis for Trans-Medium Fixed-Wing Vehicles
-
摘要: 实现水空跨介质飞行的关键包括跨介质飞行剖面设计以及同时满足空中巡航的气动效率和水下滑翔对机翼翼型的不同要求。文中以一小型跨介质飞行器为平台, 首先提出了一种基于传统固定翼飞行器与水下滑翔机融合设计的跨介质飞行剖面方案, 确定若干典型工况, 并根据工况选定基于NACA00和NACA44系列的备选翼型, 采用Fluent的可压流动模型, 对备选翼型集开展数值分析, 通过数值仿真计算了备选翼型在空气与水中的升阻比、升力线斜率、升阻系数和力矩系数等气动和水动力特性, 作为跨介质固定翼飞行器翼型的优选目标函数和约束条件。重点分析了其水下航行剖面下的优选翼型以及相应的飞行/潜航运动参数之间的关系, 特别是翼型弯度变化对水下续航时间和航程的影响, 为跨介质飞行器的方案设计提供翼型优选决策, 建立的分析流程可为翼型的参数优化提供参考。Abstract: The key to the realization of air-water trans-medium flight lies in the profile design of trans-medium flight and the satisfaction of different requirements of aerodynamic efficiency for air cruise and airfoil for underwater glide. In this paper, a trans-medium flight profile scheme based on the fusion design of traditional fixed-wing vehicles and underwater gliders was proposed with a small trans-medium vehicle as the platform. Several typical working conditions were determined, and alternative airfoils based on NACA00 and NACA44 series were selected according to the working conditions. The compressible flow model of Fluent was used to carry out numerical analysis on the alternative airfoil set. The aerodynamic and hydrodynamic characteristics of the alternative airfoils in air and water, such as lift-to-drag ratios, lift line slope, lift and drag coefficients, and torque coefficients were calculated by numerical simulation, which were then used as the optimal objective function and constraint conditions of the airfoil of the trans-medium fixed-wing vehicle. The relationship between the preferred airfoil under the underwater navigation profile and the corresponding flight/underwater motion parameters was emphatically analyzed, especially the influence of the change in airfoil camber on the underwater endurance time and range, so as to provide the airfoil optimization decision for the scheme design of the trans-medium vehicle, and the established analysis process can provide a reference for the parameter optimization of the airfoil.
-
Key words:
- trans-medium /
- fixed-wing vehicle /
- flight profile /
- underwater glider /
- airfoil
-
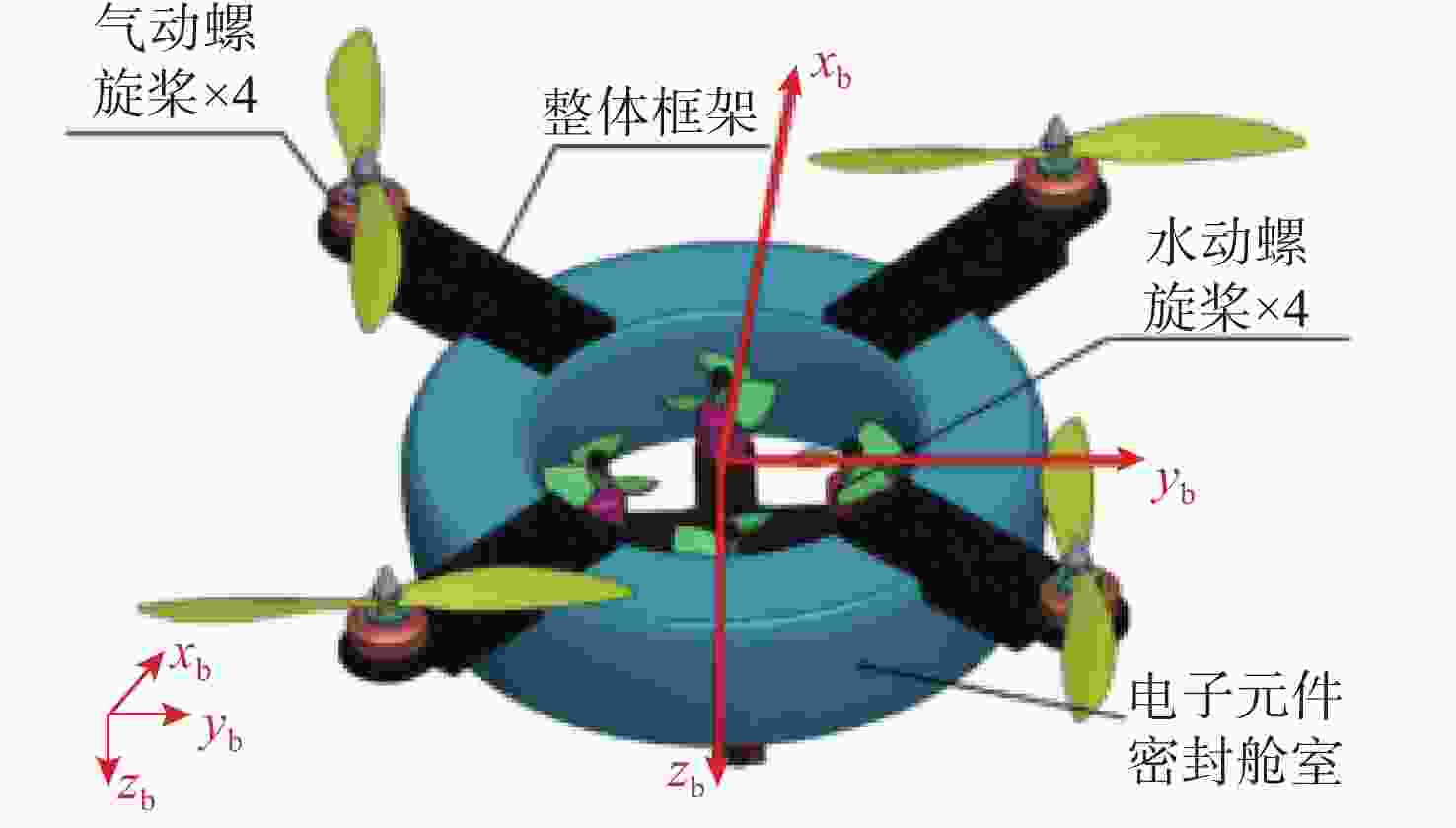
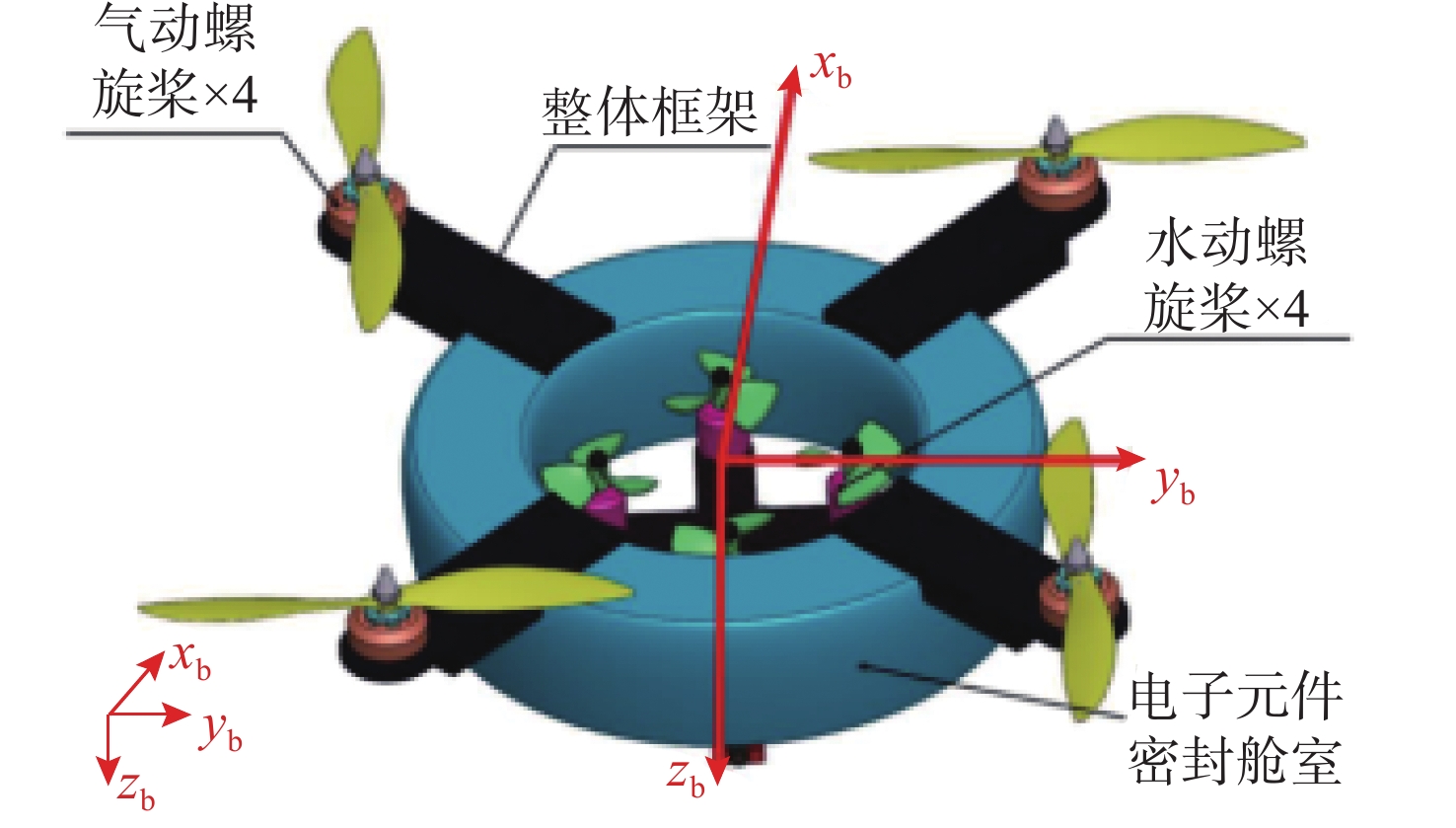
图 1 吉林大学四旋翼跨介质飞行器
Figure 1. Quadrotor trans-medium vehicle designed by Jilin University

图 2 上海交通大学 “哪吒III” 跨介质飞行器
Figure 2. “Nezha”III trans-medium vehicle designed by Shanghai Jiao Tong University

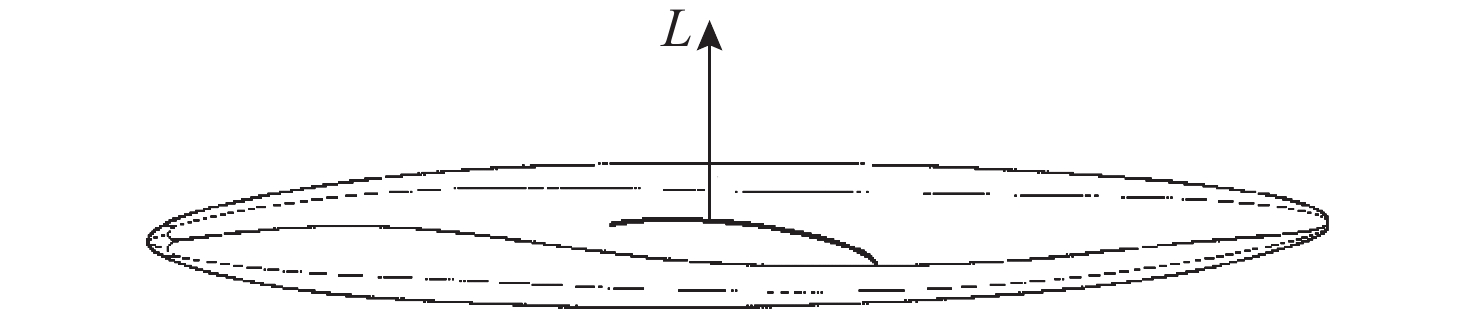
图 8 水下滑翔状态下机翼改变后缘弯度产生的负升力
Figure 8. Negative lift generated by changing trailing-edge curvature of the wings in underwater gliding condition
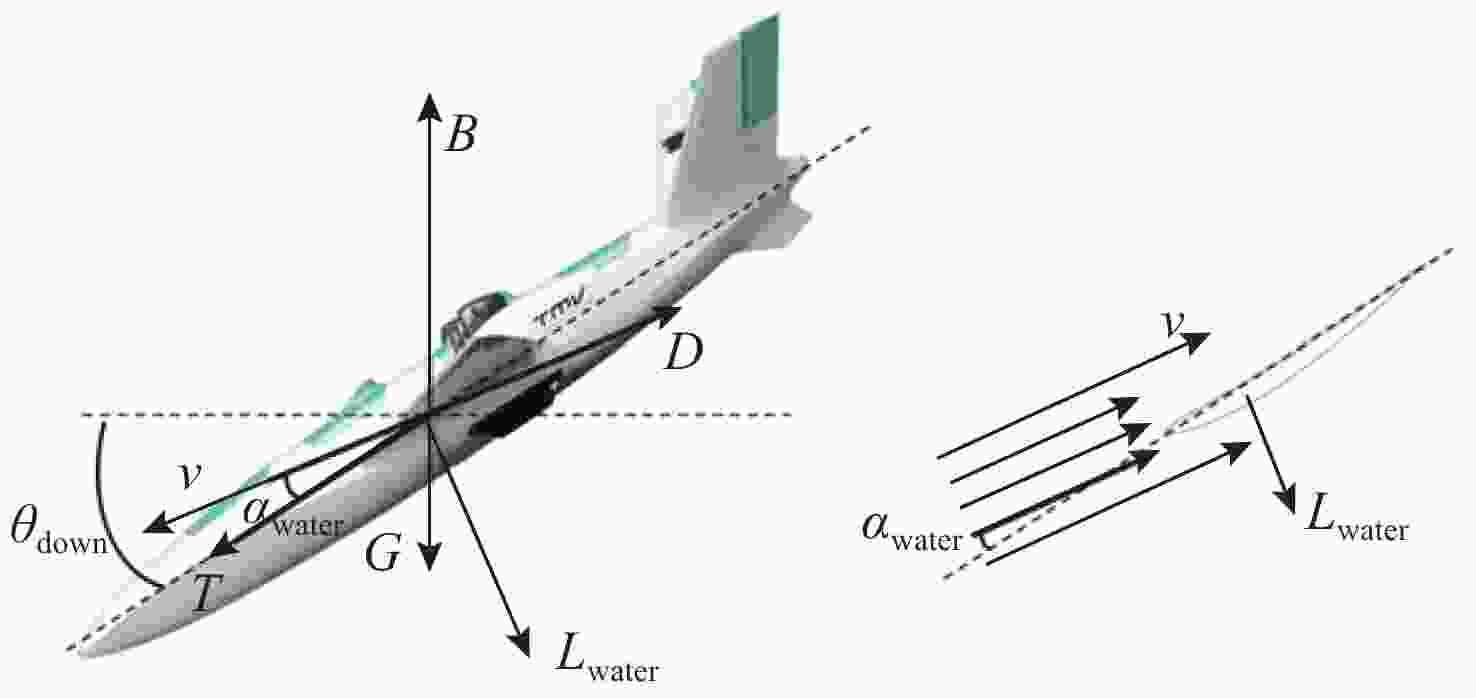
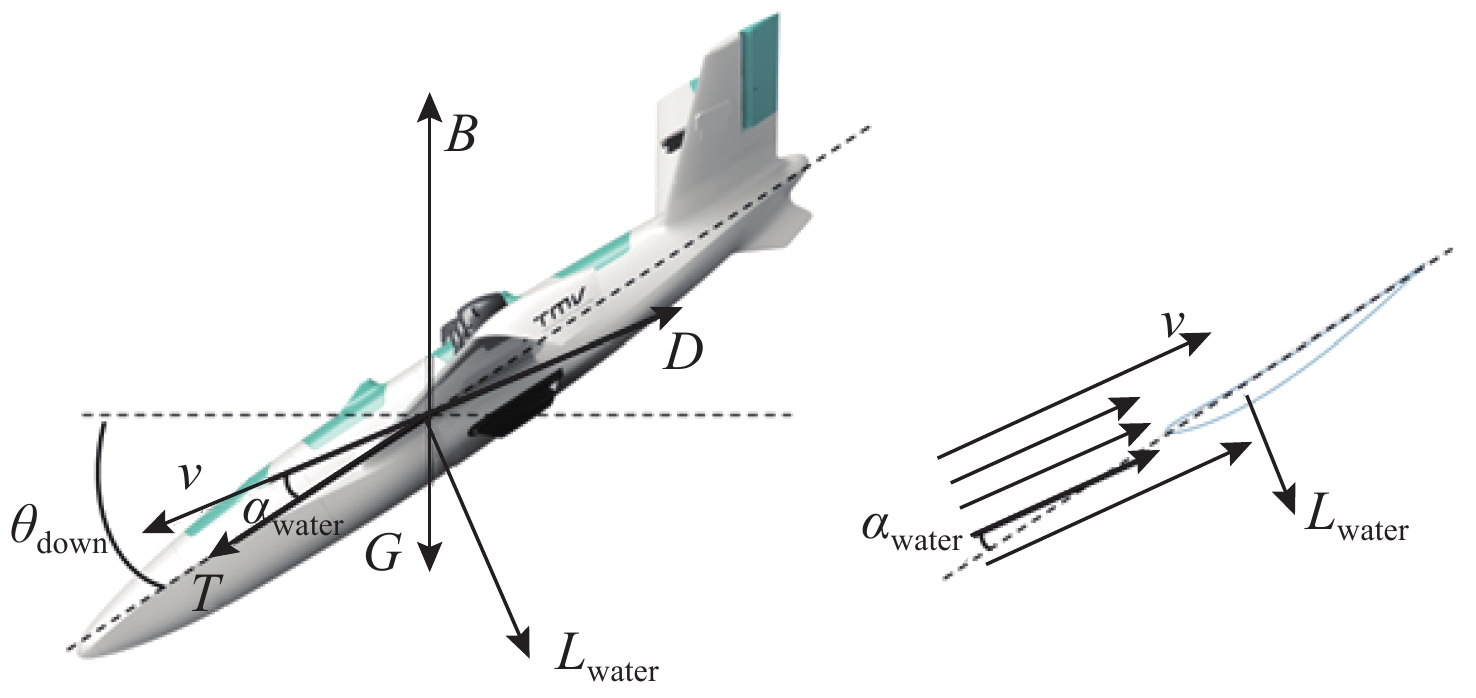
图 11 跨介质飞行器水下下潜动力学模型
Figure 11. Underwater diving dynamic model of the trans-medium vehicle
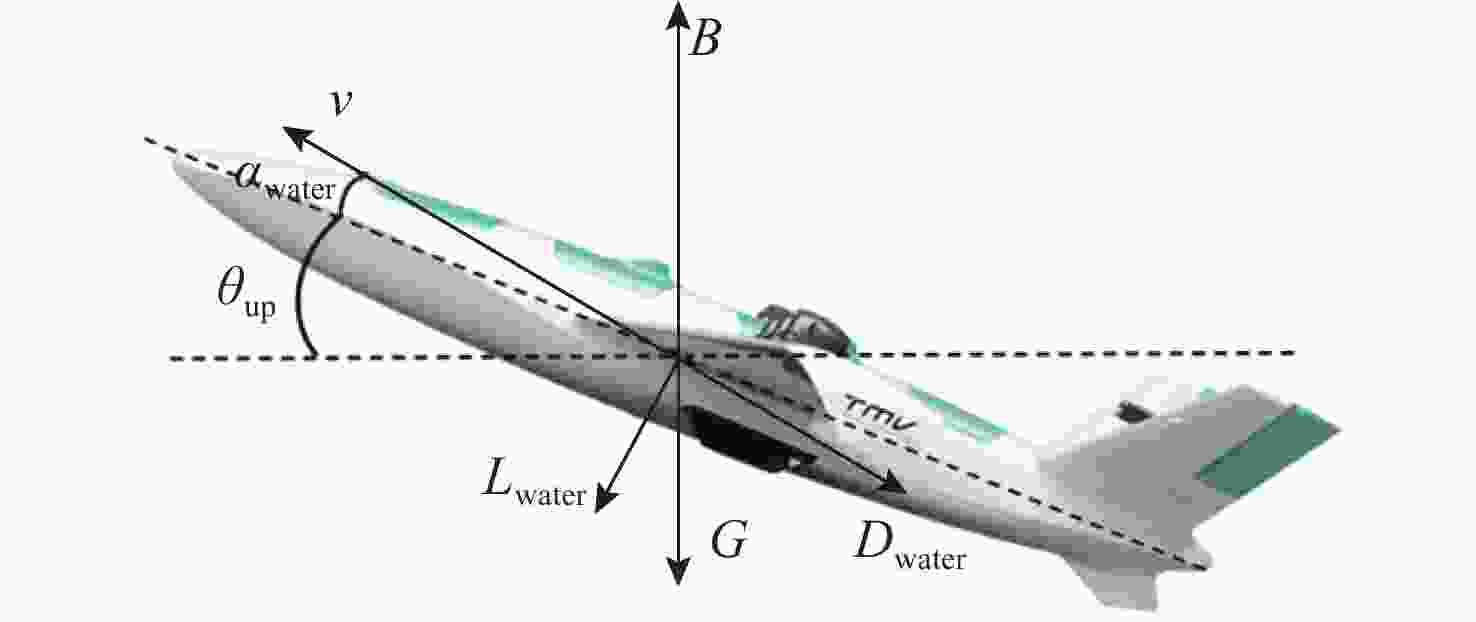
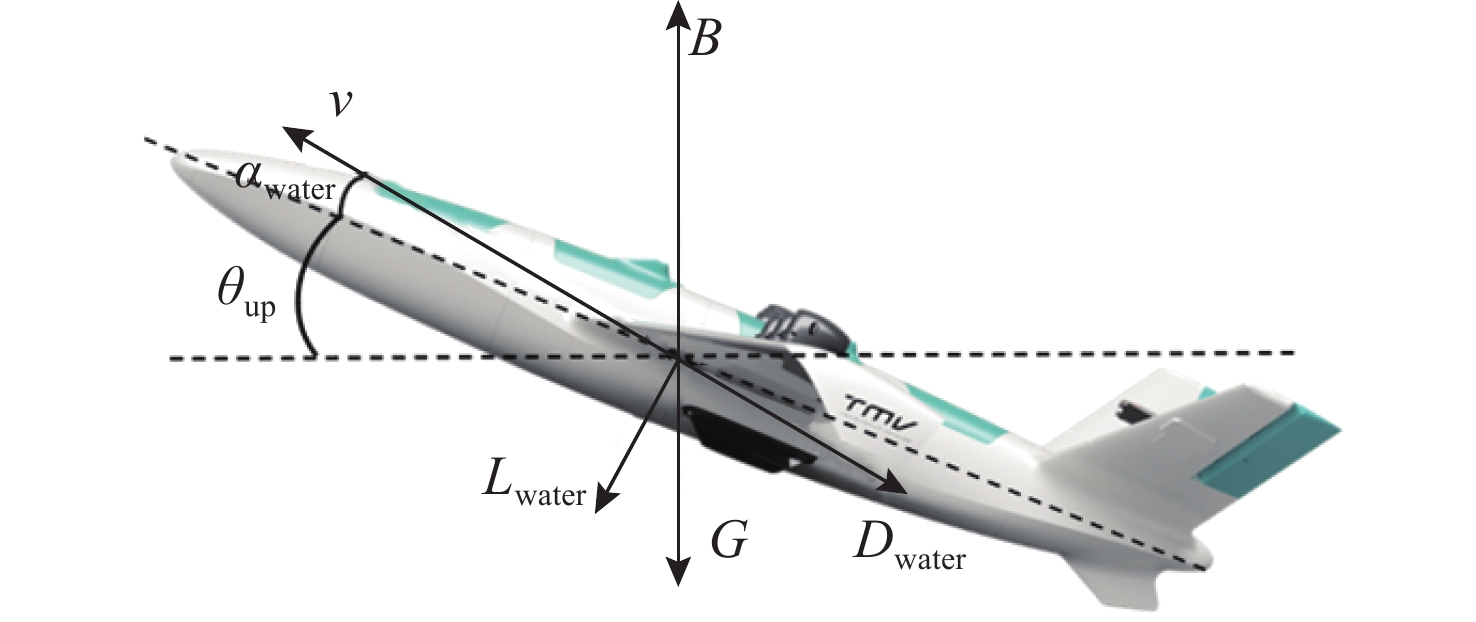
图 12 跨介质飞行器水下上浮动力学模型
Figure 12. Underwater ascending dynamic model of the trans-medium vehicle
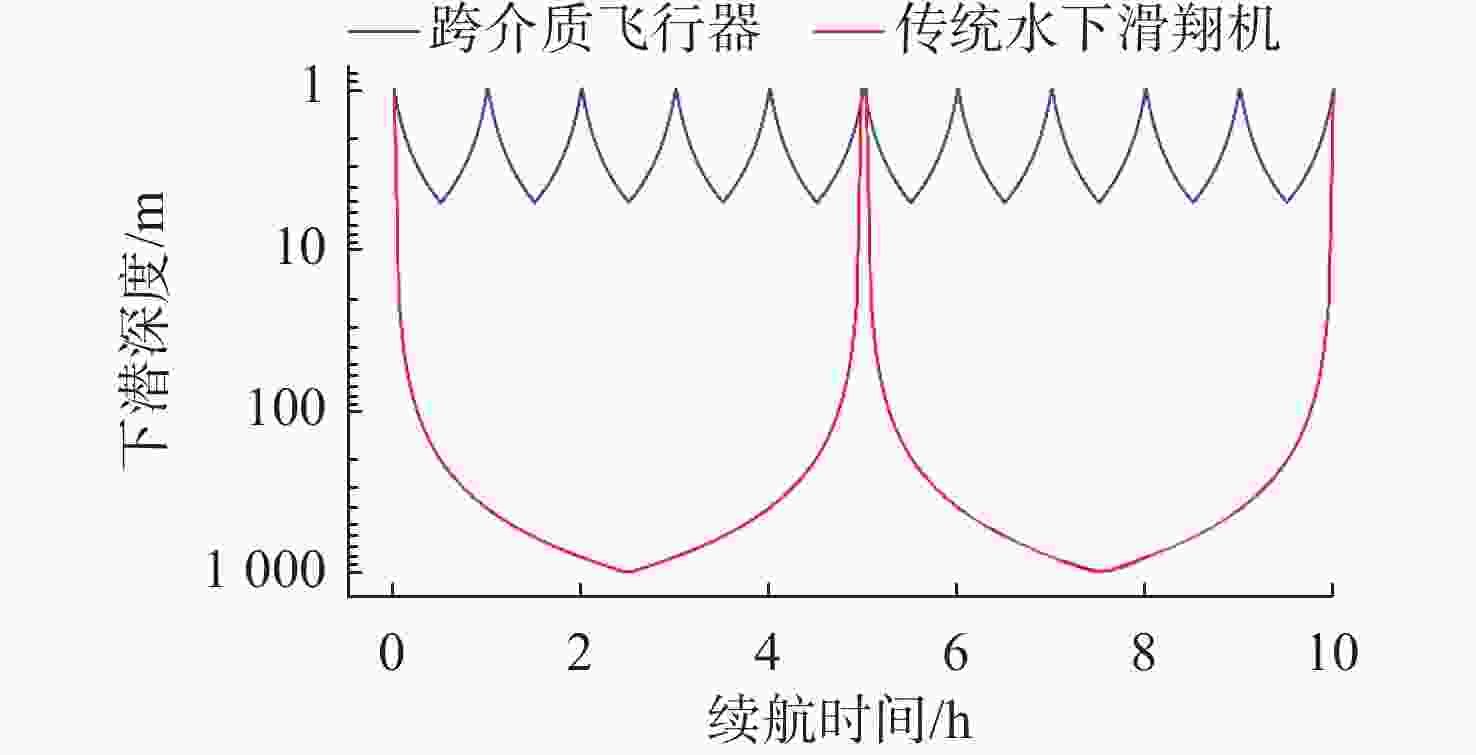
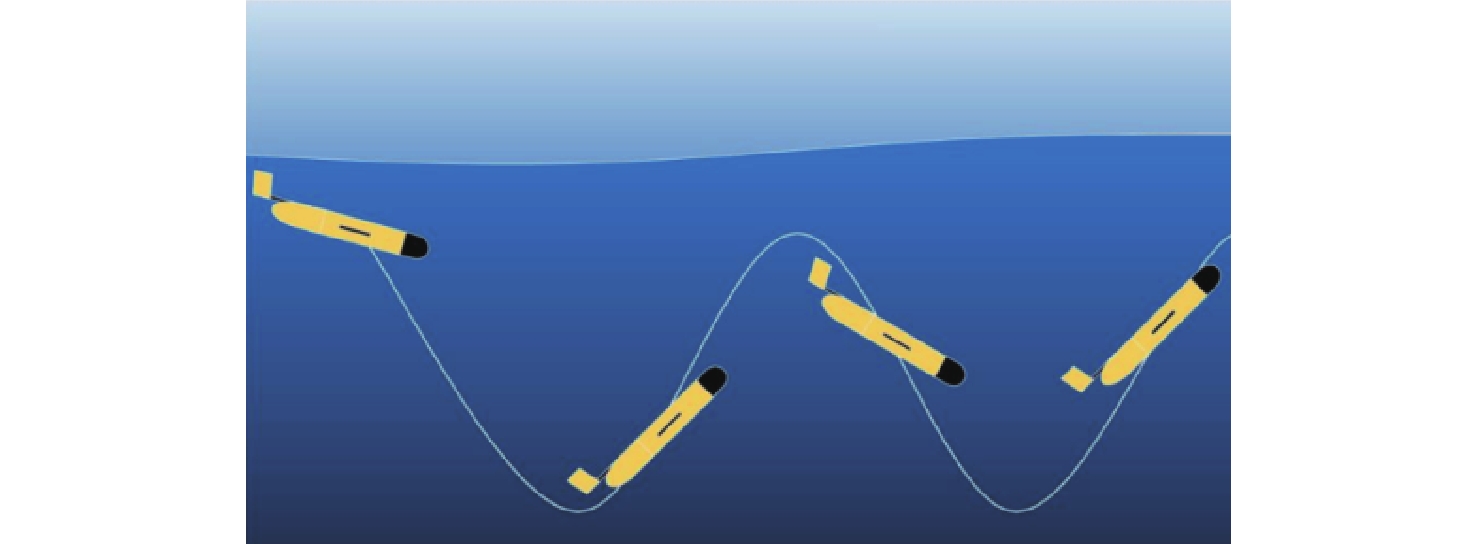
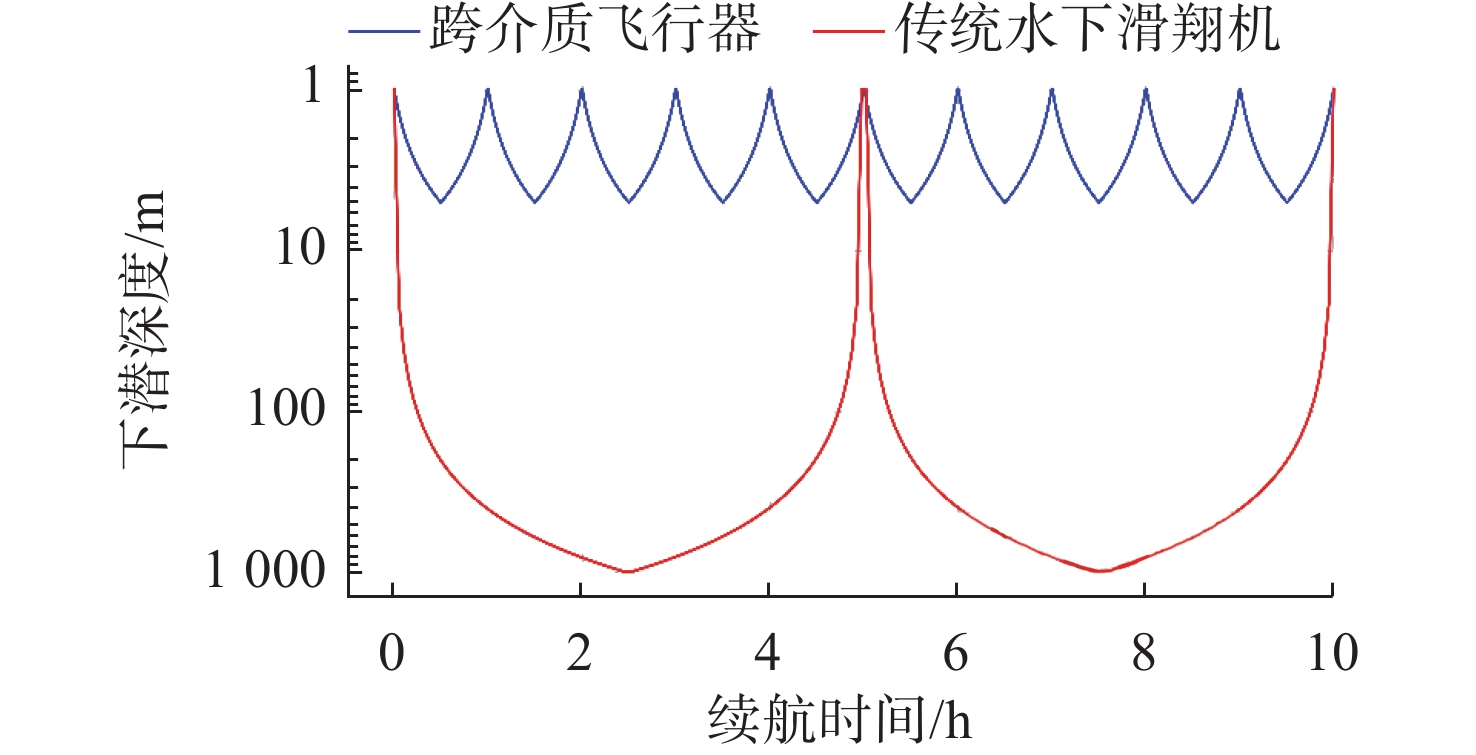
图 13 跨介质飞行器与水下滑翔机浅水航行轨迹对比
Figure 13. Comparison of shallow-water navigation trajectories between trans-medium vehicles and underwater gliders

图 14 嵌入晶格柔顺结构的机翼结构
Figure 14. Wing structure after embedding of lattice compliant structure

图 15 嵌入非均匀晶格后机翼变形侧视图
Figure 15. Side view of the wing deformation after embedding the non-uniform lattice structure
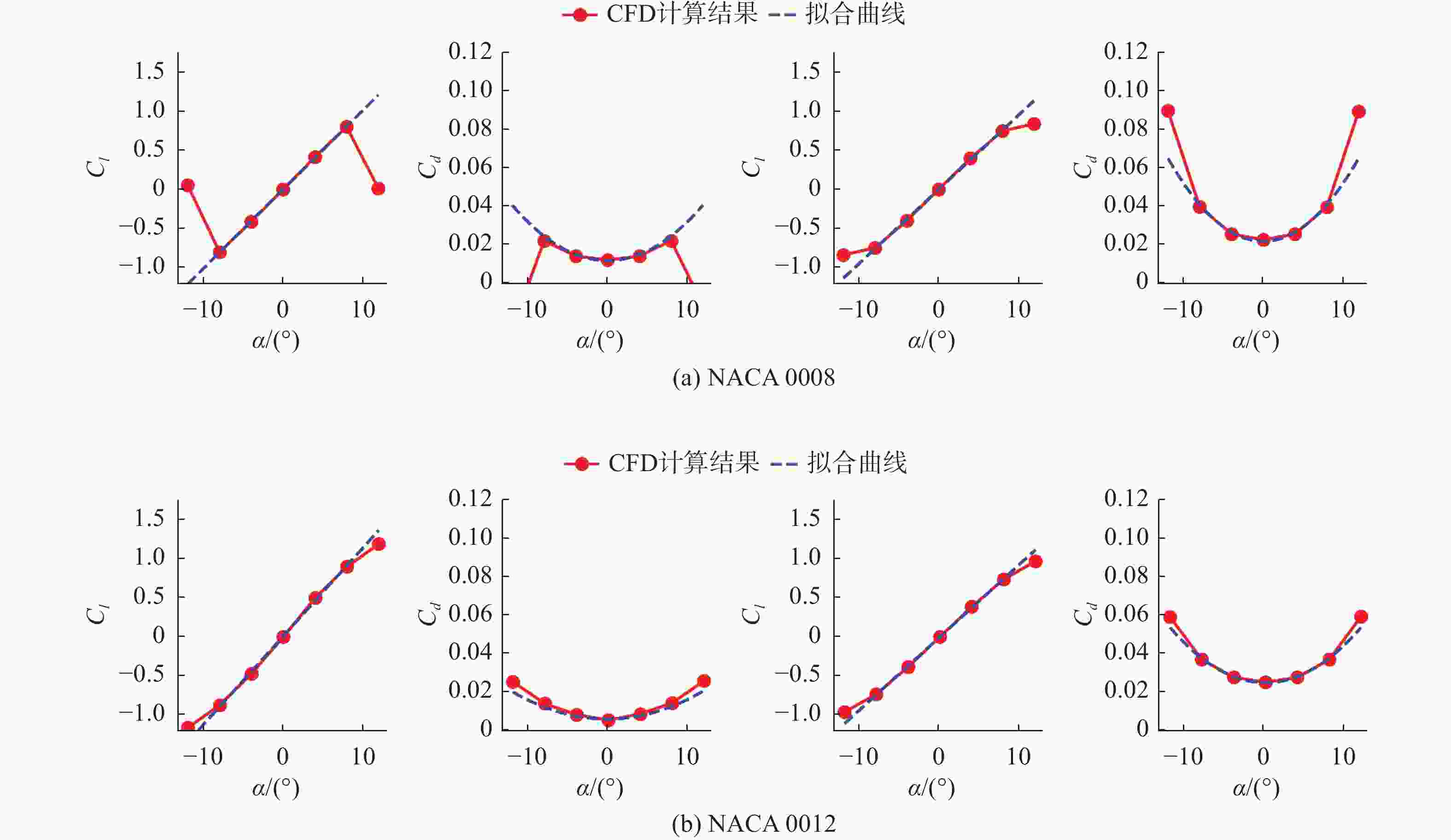
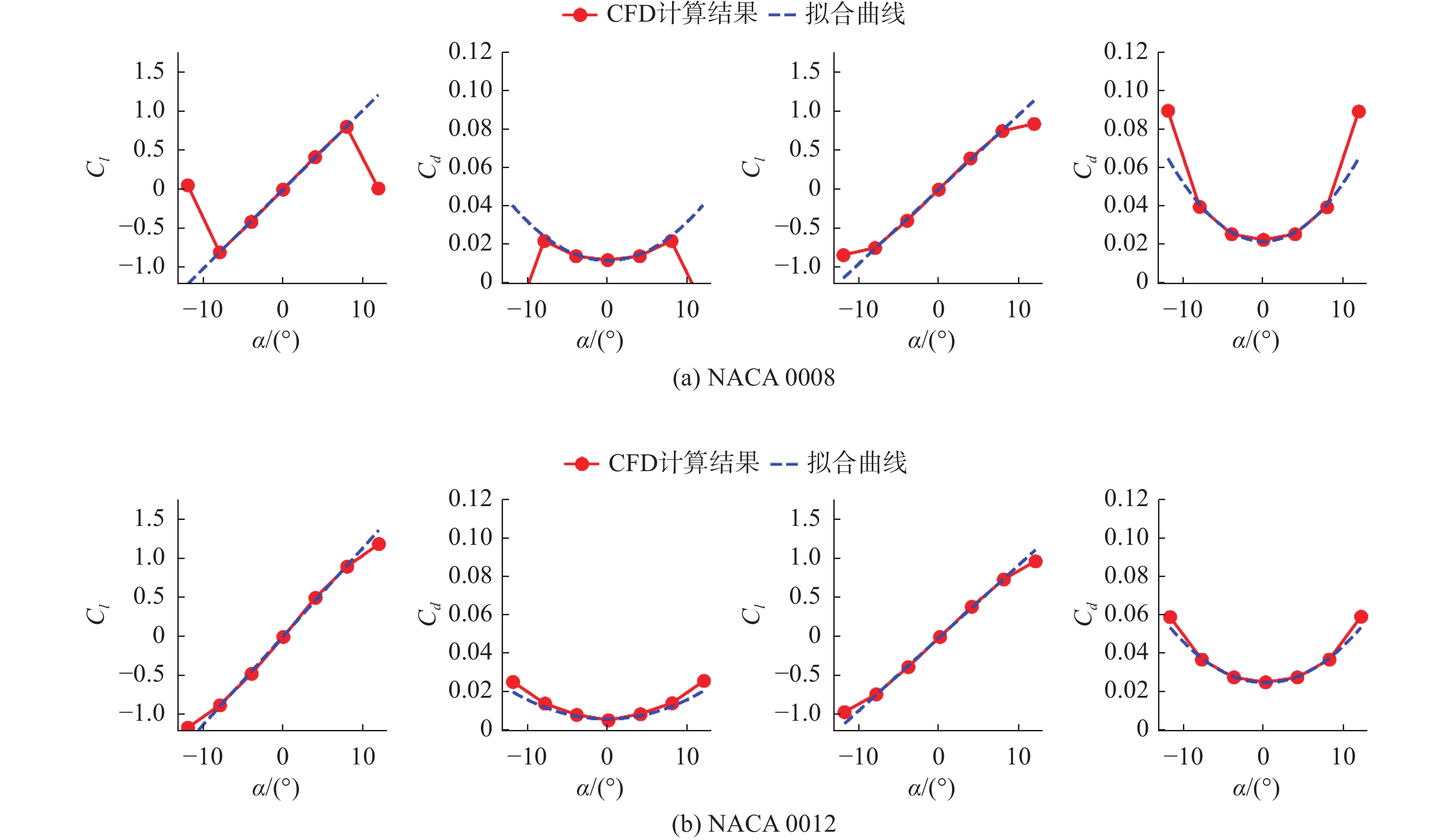
图 16 NACA 0008及0012翼型升阻系数及拟合曲线
Figure 16. Lift and drag coefficients and fitted curves of NACA 0008 and 0012 airfoils
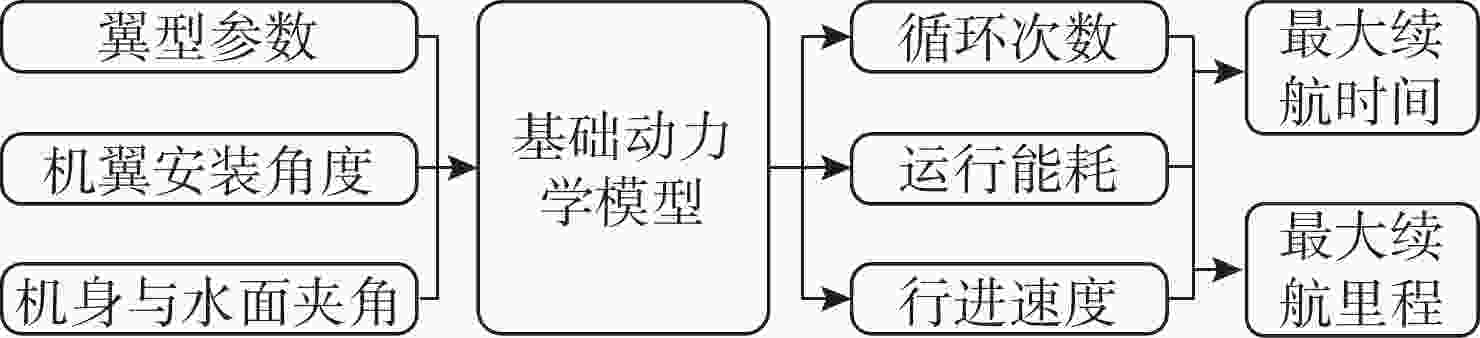
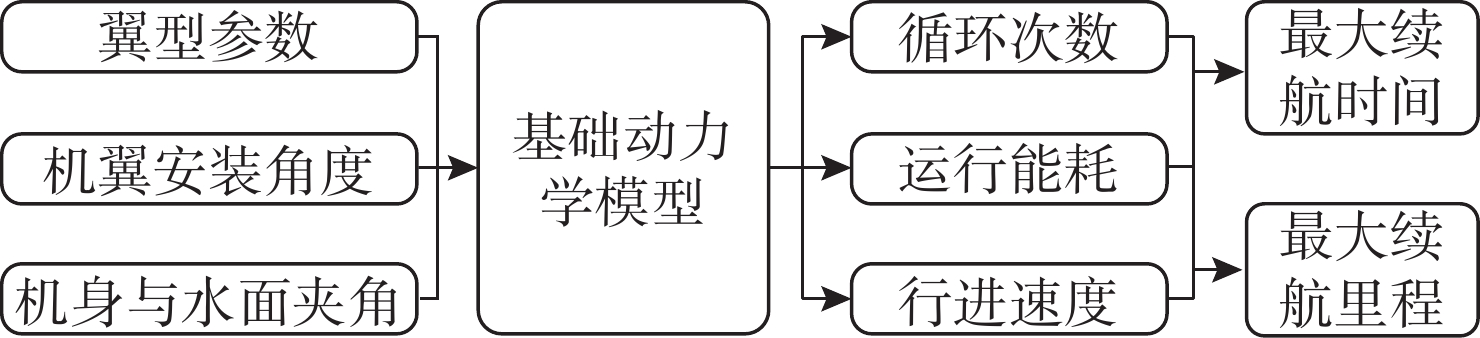
图 17 跨介质飞行器水下续航性能模型构建
Figure 17. Construction of underwater endurance performance model of the trans-medium vehicle
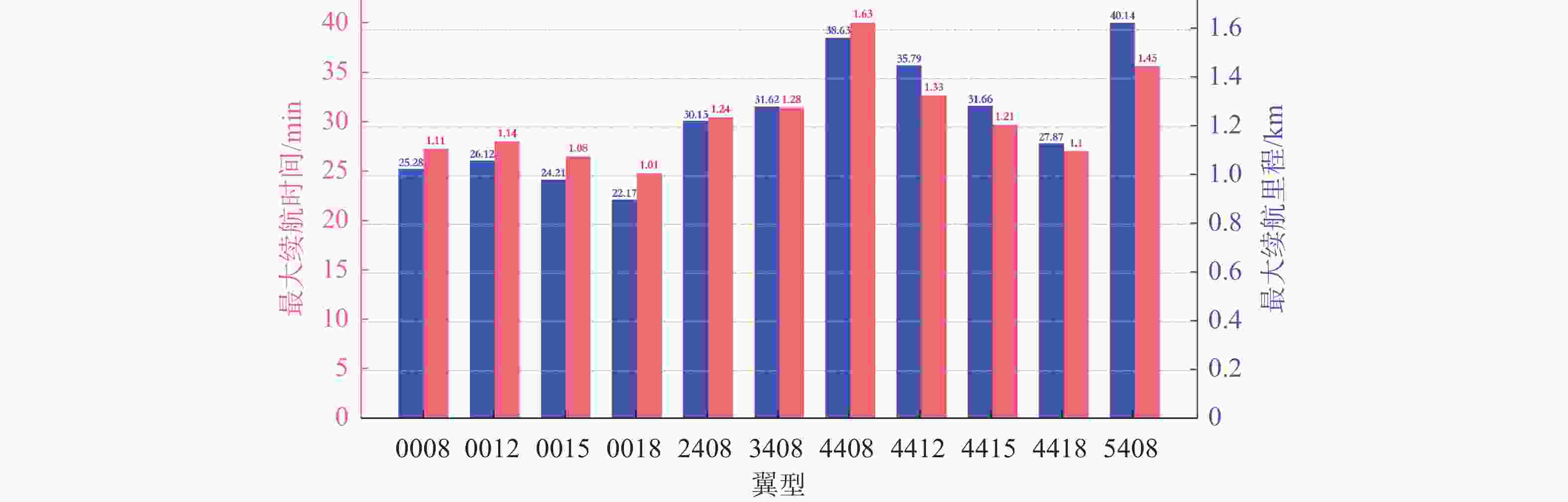
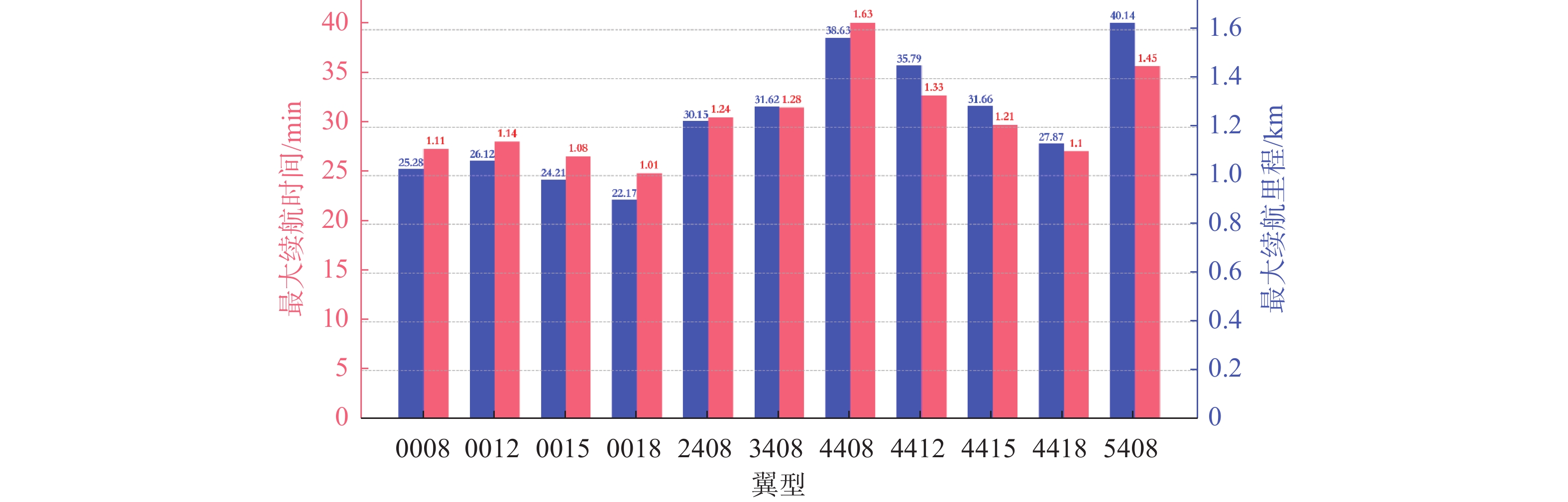
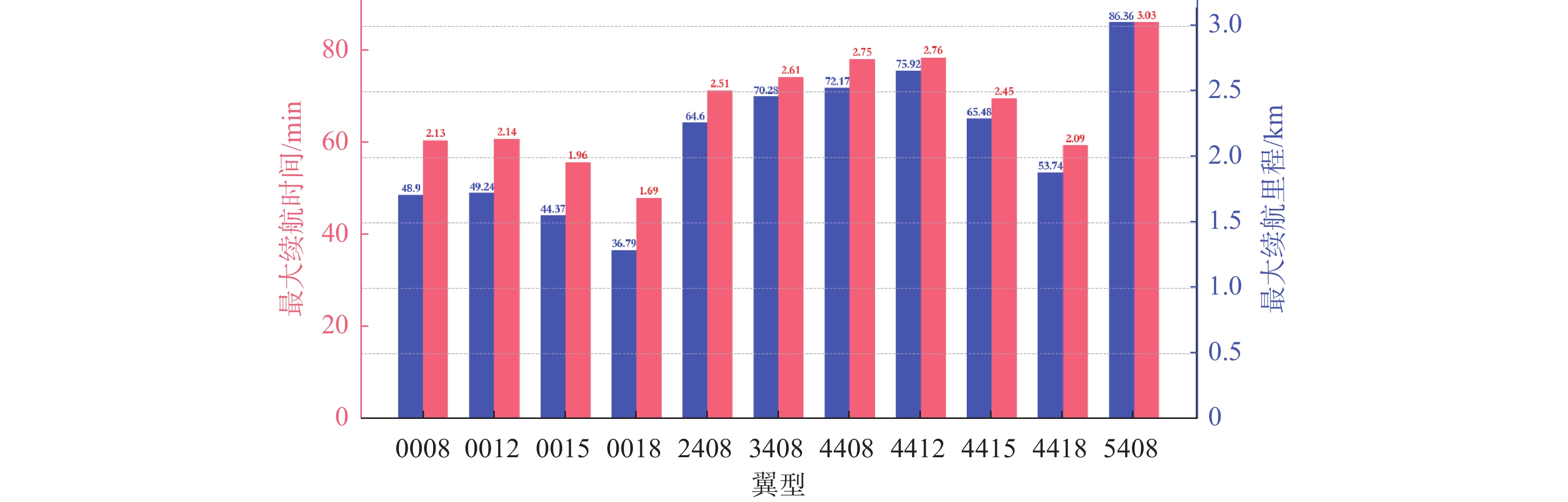
图 18 固定翼型弯度下NACA系列翼型水下最大续航时间和里程
Figure 18. Maximum underwater endurance time and range of NACA series airfoils under the fixed airfoil camber
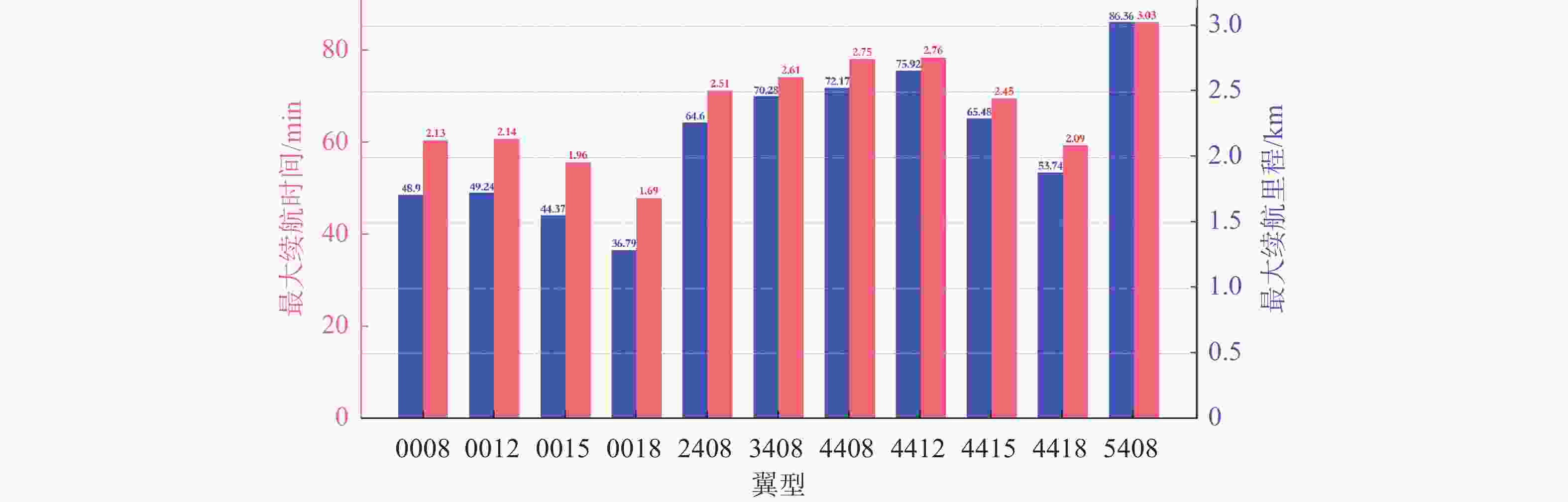
图 19 可变翼型弯度下NACA系列翼型水下最大续航时间和里程
Figure 19. Maximum underwater endurance time and range of fixed NACA series airfoils under the adjustable airfoil camber
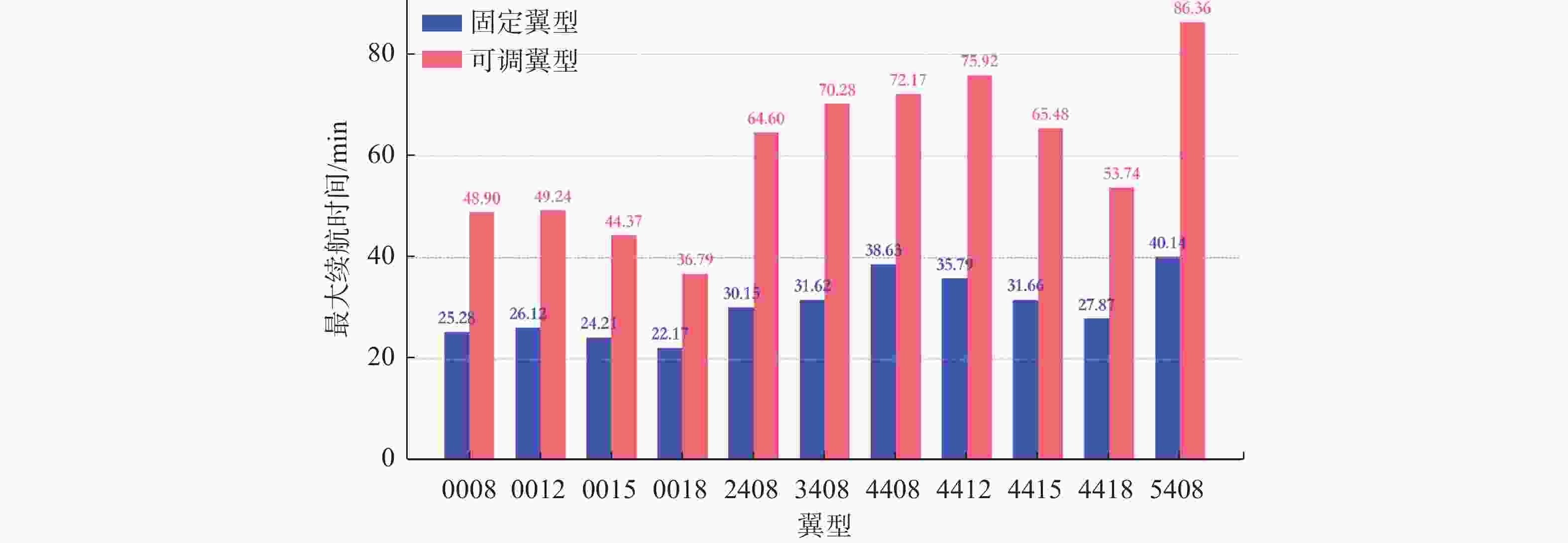
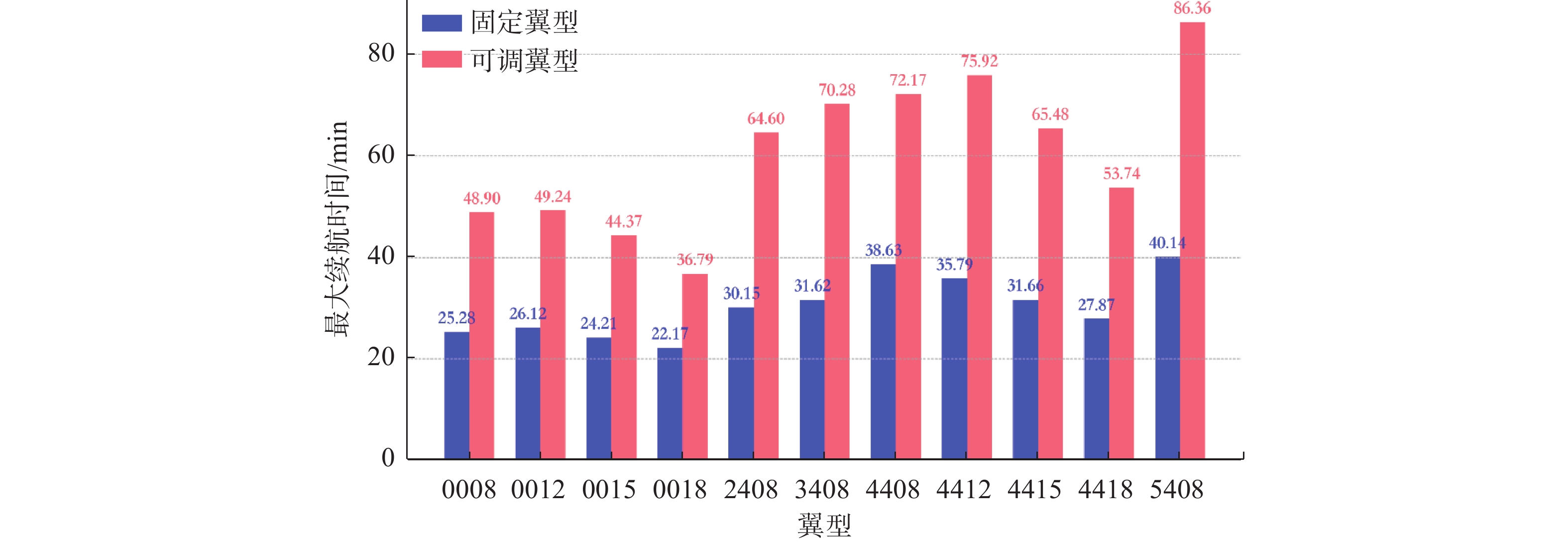
图 20 可变弯度翼型与固定翼型水下最大续航时间对比
Figure 20. Comparison of underwater maximum endurance time between the adjustable camber airfoil and the fixed airfoil
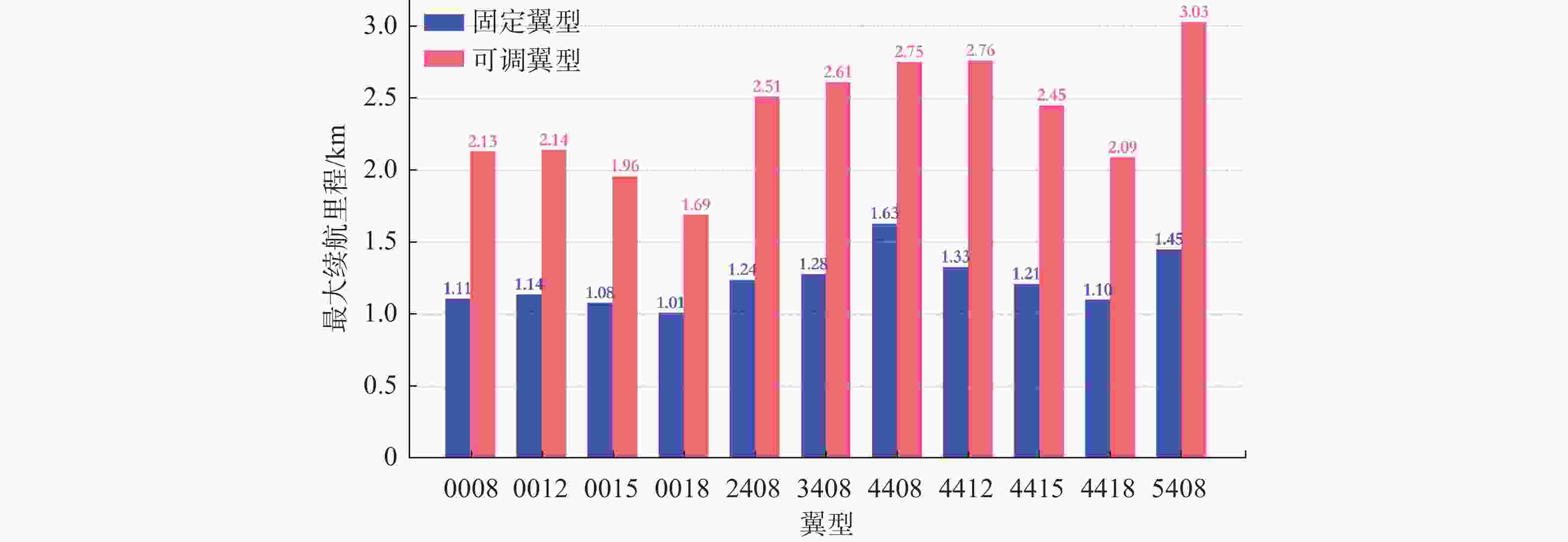
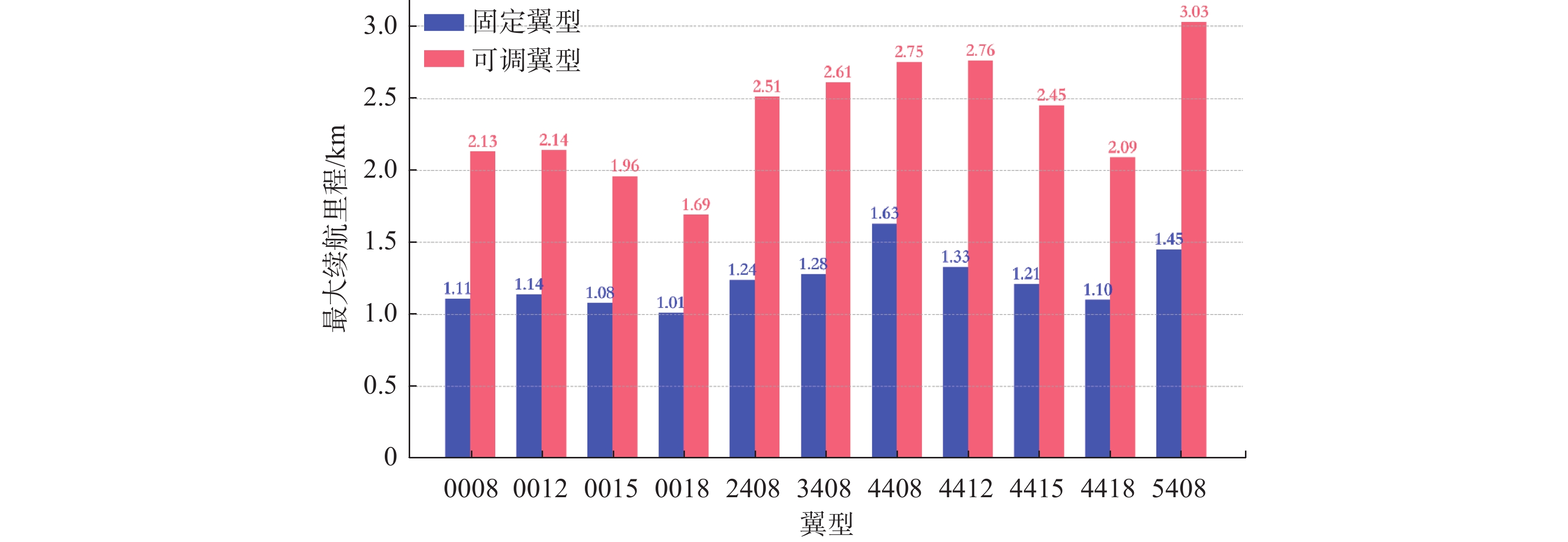
图 21 水下可变弯度翼型与固定翼型水下最大续航里程对比
Figure 21. Comparison of underwater maximum endurance range between the adjustable camber airfoil and the fixed airfoil
表 1 不同网格数和介质下NACA4412翼型升力和阻力系数
Table 1. Lift and drag coefficients of NACA4412 airfoil under different grid numbers in air and water
介质 网格数量 网格间距($ \Delta x/c $) 升力系数 阻力系数 空气介质
网格1385 500 4.903×10−3 0.789 807 0.018 86 空气介质
网格2172 700 8.258×10−3 0.785 114 0.018 88 空气介质
网格342 640 29.270×10−3 0.777 798 0.019 13 水下介质
网格1686 800 3.452×10−3 0.713 105 0.031 07 水下介质
网格2173 000 7.995×10−3 0.713 472 0.031 14 水下介质
网格343 000 25.883×10−3 0.708 812 0.030 89  下载: 导出CSV
下载: 导出CSV
表 2 跨介质飞行器具体参数
Table 2. Parameters of the trans-medium vehicle
参数 数值 总质量/kg 10.12 总体积/L 23.84 机翼面积/m2 0.31 总可用电量/Wh 25.01 推进涵道组最大实际推力/kg 4.275 推进涵道组最大实际功率/W 2 376 机身水动阻力系数 0.1
下载: 导出CSV
-
[1] WEI J, SHA Y B, HU X Y, et al. Research on aerodynamic characteristics of trans-media vehicles entering and exiting the water in still water and wave environments[J]. Drones, 2023, 7(2): 7020069. [2] LYU C, LU D, XIONG C, et al. Toward a gliding hybrid aerial underwater vehicle: Design, fabrication, and experiments[J]. Journal of Field Robotics, 2022, 39(5): 543-556. doi: 10.1002/rob.22063 [3] ROCKENBAUER F M, JEGER S L, BELTRAN L, et al. Dipper: A dynamically transitioning aerial-aquatic unmanned vehicle[C]//Robotics: Science and Systems XVII. [S.l.]: RSS, 2021. [4] SIDDAL L R, KOVAČ M. Launching the AquaMAV: bioinspired design for aerial–aquaticrobotic platforms[J/OL]. Bioinspiration & Biomimetics, 2014, 9(3): 031001[2024-05-16]. https://iopscience.iop.org/article/ 10.1088/1748-3182/9/3/031001. DOI: 10.1088/1748-3182/9/3/031001. [5] 姜钧喆. 水下滑翔机总体设计与水动力性能分析[D]. 上海: 上海交通大学, 2020. [6] CHENG Y X, SONG W B, HAN K X. Analysis and testing of distributed electric fan on air-water vehicle[C]// AIAA Aviation 2023 Forum. San Diego, CA, USA: AIAA, 2023. [7] HAN K X, SONG W B. Concept generation of new configurations for air-water vehicles[C]//AIAA Aviation 2022 Forum. Chicago, IL, USA: AIAA, 2022. [8] HOCKLEY C J. Improving seaglider efficiency: An analysis of wing shapes, hull mor phologies, and propulsion methods[D]. Daytona Beach, FL, USA: Embry-Riddle Aeronautical University, 2018. [9] 侯涛刚, 靳典哲, 龚毓琰, 等. 水空跨介质航行器前沿技术进展[J]. 科技导报, 2023, 41(2): 5-22.HOU T G, JIN D Z, GONG Y Y, et al. Advances in frontier technologies of water-air transmedia vehicles[J]. Science and Technology Bulletin, 2023, 41(2): 5-22. [10] LU D, XIONG C, ZHOU H, et al. Design, fabrication, and characterization of a multimodal hybrid aerial underwater vehicle[J]. Ocean Engineering, 2021, 219: 108324. [11] YANG X, WANG T, LIANG J, et al. Survey on the novel hybrid aquatic-aerial amphibious aircraft: aquatic unmanned aerial vehicle(AquaUAV)[J]. Progress in Aerospace Sciences, 2015, 74: 131-151. -

 下载:
下载:









 点击查看大图
点击查看大图
计量
- 文章访问数: 790
- HTML全文浏览量: 352
- PDF下载量: 126
- 被引次数: 0