

AUV with Underwater Acoustic-WIFI Link Cooperative Control for Confined Waters
-
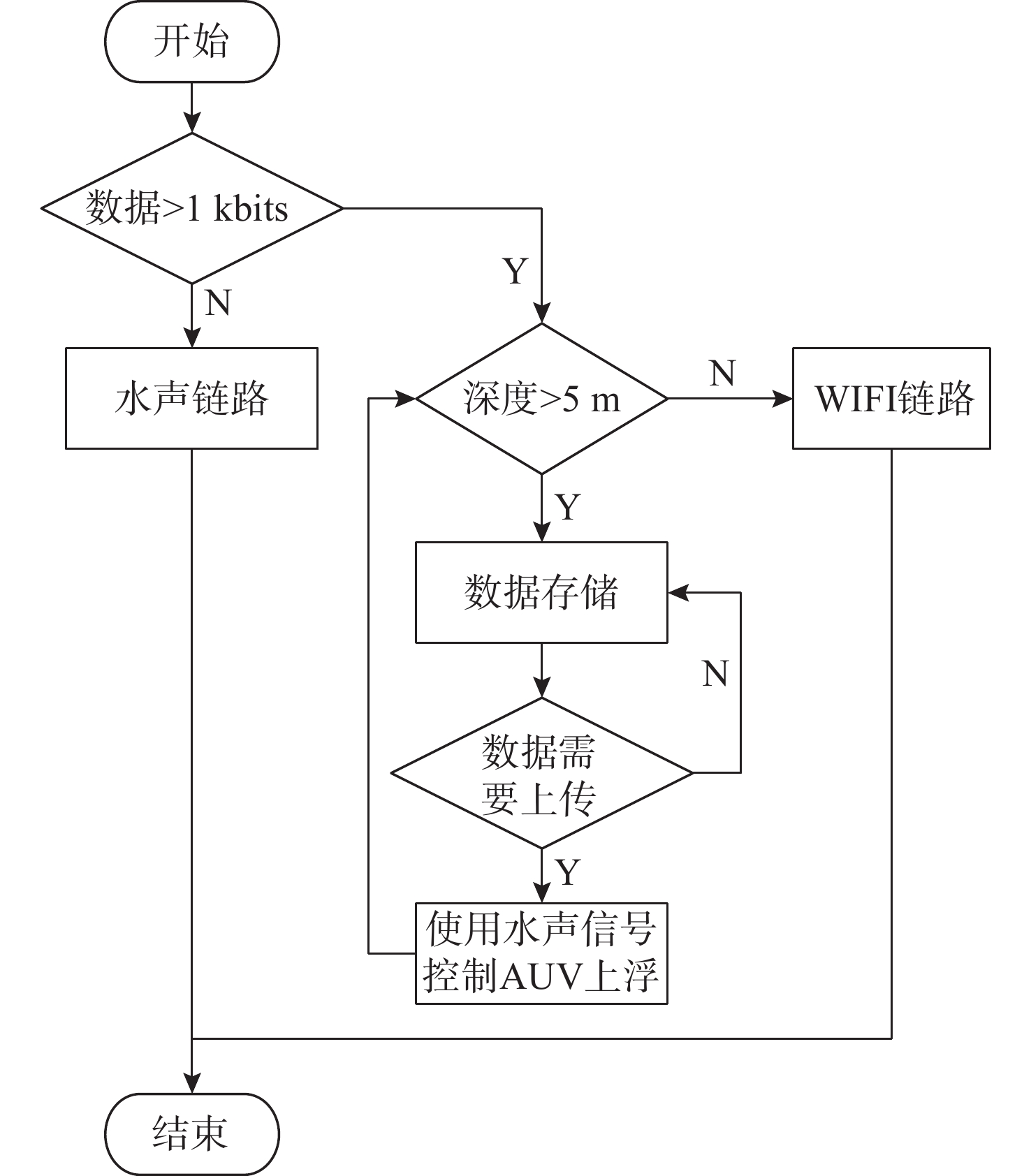
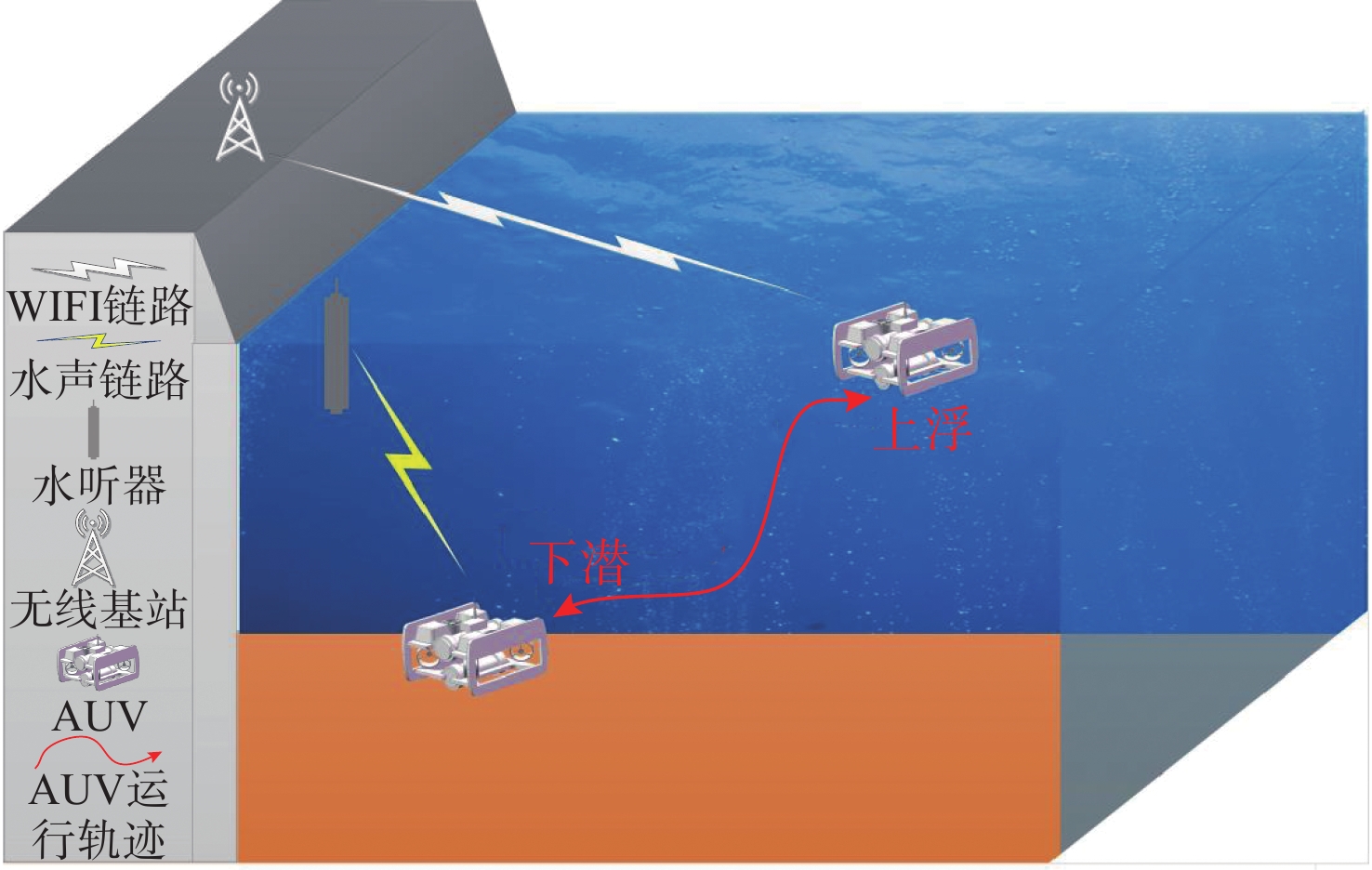
摘要: 自主水下航行器(AUV)水下控制链路一般采用水声通信链路。对于浅海岸滩、水库、湖泊、管渠及洞穴等水域地形复杂的受限水域, 复杂多径会对高速率水声通信性能造成严重影响, 而有限水域深度为无线链路的应用提供了可能性。面向此类应用, 文中设计了一种采用水声和WIFI双链路协同控制的小型AUV: SubseaBuddy-3, 其水声链路采用低速率扩频水声通信方式以保证强多径条件下的通信可靠性, 而高速率WIFI链路则可在浅水区工作, 或应用于布放前的功能调试测试, 以及回收阶段的控制和观测。通过水声链路、WIFI链路在不同工作深度、不同信息获取/回传状态进行协同, 可满足受限水域条件下可靠指控、水下图像实时/准实时回传的需求。同时, AUV配备惯性测量单元和深度传感器, 可进行姿态和深度控制。水池实验证实了双链路AUV的工作有效性。Abstract: Autonomous undersea vehicle(AUV) generally adopts acoustic communication links for underwater control. However, in complex and confined waters such as coastal shoals, reservoirs, lakes, canals, and caves, complex multiple paths can seriously impact the performance of high-speed underwater acoustic communication, while the limited water depth of these environments makes wireless links a viable option. Therefore, a micro-sized AUV, SubseaBuddy-3, was developed that integrated both underwater acoustic and WIFI links for cooperative control. The underwater acoustic link adopted the low-speed spread-spectrum communication mode to ensure communication reliability under strong multipath conditions, while the high-speed WIFI link could work in shallow water, be used for pre-deployment function testing, and assist with the control and observation during retrieval. By coordinating the underwater acoustic and WIFI links based on working depths and data acquisition/transmission states, the system ensured reliable command and control, along with real-time/quasi-real-time underwater image transmission in confined waters. Additionally, the AUV was equipped with an inertial measurement unit(IMU) and a depth sensor for attitude and depth control. The effectiveness of the dual-link communication system for AUVs was validated by the pool experiment.
-
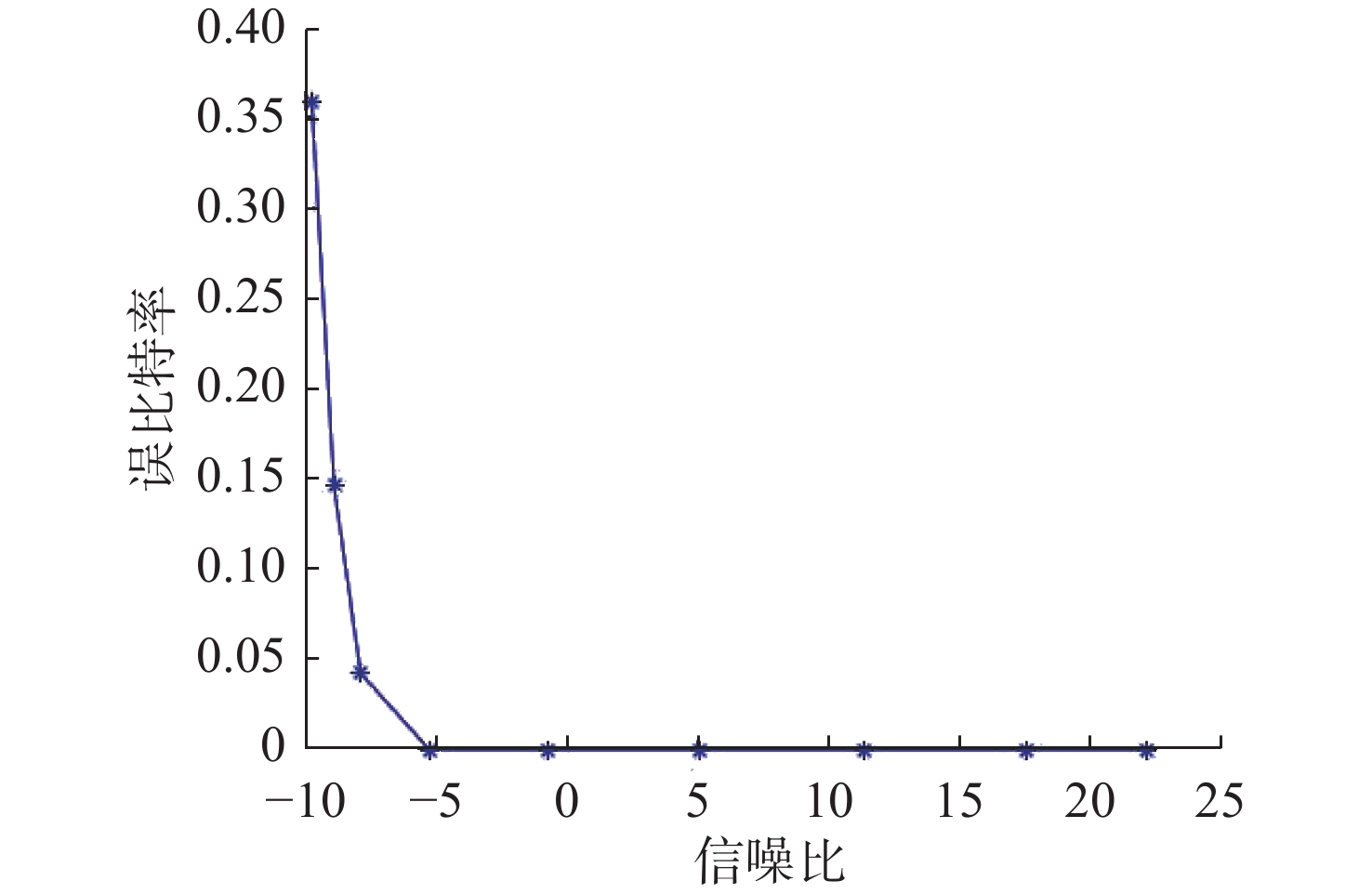
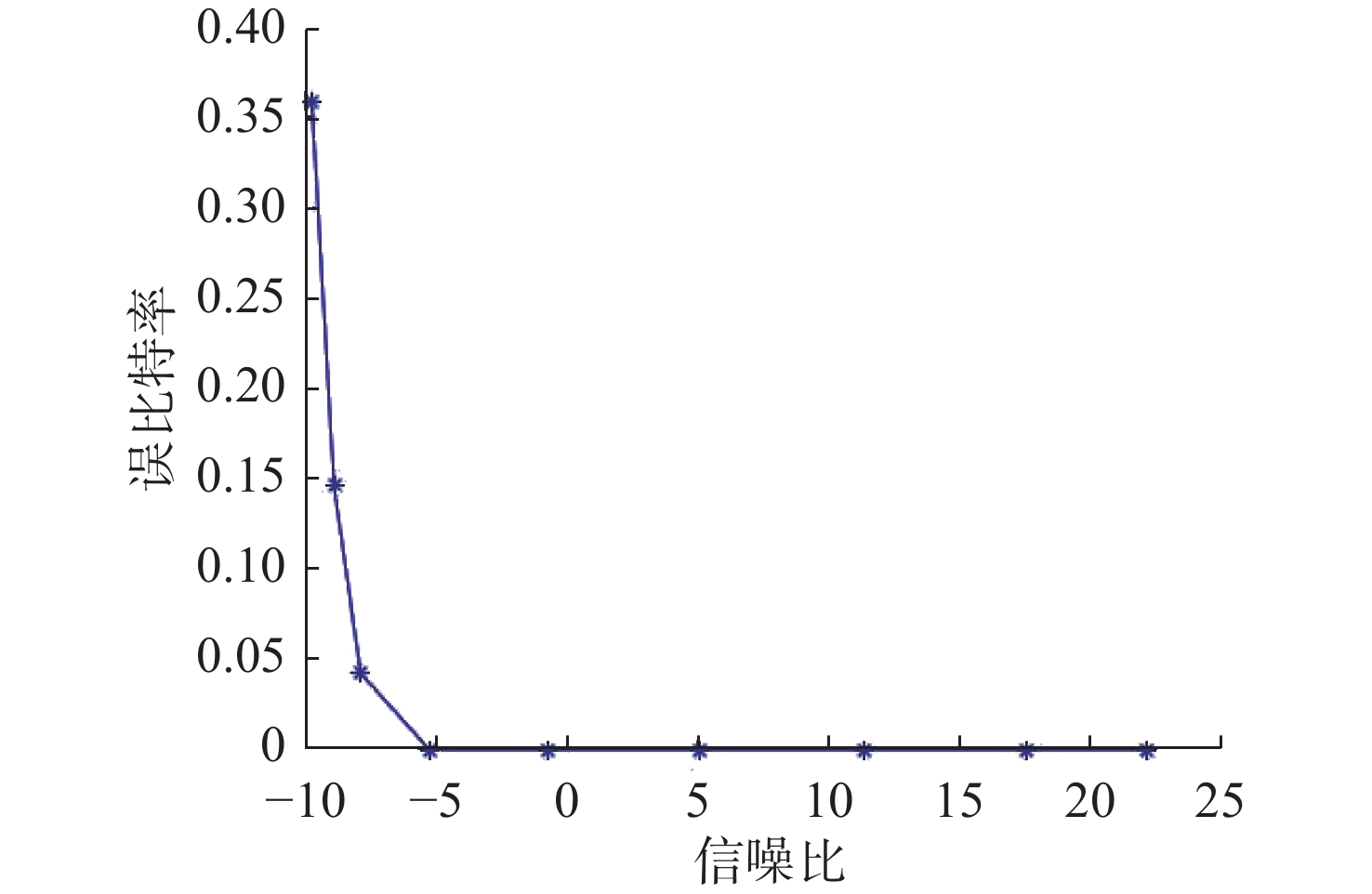
图 17 水声信号信噪比-误比特率曲线
Figure 17. Curve of signal noise ratio-bit error rate of acoustic signal
表 1 AUV基本规格
Table 1. Basic specifications of the AUV
参数 数值 舱体长度/mm 700 舱体内径/mm 220 舱体壁厚/mm 5 质量/kg 20 最大下潜深度/m 20  下载: 导出CSV
下载: 导出CSV
表 2 AUV水声链路通信指标
Table 2. Communication specifications of acoustic link of the AUV
参数 数值 通信距离/km 5 采样率/kHz 75 信号中心频率/kHz 25 调制方式 DSSS 数据率/(bits/s) 55.8
下载: 导出CSV
-
[1] BROWN H C, LAWRENCE M S, SLOAT J V, et al. Toward longitudinal reef health monitoring in the Florida keys national marine sanctuary using Iver AUVs[C]//OCEANS 2019 MTS/IEEE SEATTLE. Seattle, USA: IEEE, 2019: 1-7. [2] GALLIMORE E, TERRILLl E, HESS R, et al. Integration and evaluation of a next-generation chirp-style sidescan sonar on the REMUS 100[C]//IEEE/OES Autonomous Underwater Vehicle Workshop. Piscataway, USA: IEEE, 2018: 1-6. [3] KUKULYA A, PLUEDDEMANN A, AUSTIN T, et al. Under-ice operations with a REMUS-100 AUV in the Arctic[C]//IEEE/OES Autonomous Underwater Vehicles. Piscataway, USA: IEEE, 2010: 1-8. [4] UNDERWOODd A, MUEPHY C. Design of a micro-AUV for autonomy development and multi-vehicle systems[C]//OCEANS 2017-Aberdeen. Aberdeen, UK: OCEANS, 2017: 1-6. [5] RANDENI P S A T, RYPKEMA N R, FISCHELL E M, et al. Implementation of a hydrodynamic model-based navigation system for a low-cost AUV fleet[C]//IEEE/OES Autonomous Underwater Vehicle Workshop. Piscataway, USA: IEEE, 2018: 1-6. [6] DUECKER D A, BAUSCHMANN N, HANSENn T, et al. Hippo CampusX—A hydrobatic open-source micro AUV for confined environments[C]//2020 IEEE/OES Autonomous Underwater Vehicles Symposium(AUV). NL, Canada: IEEE, 2020: 1-6. [7] RENNER C, HEITMANN J, STEINMETZ F, et al. Inexpensive, low-power communication and localization for underwater sensor networks and µAUVs[J]. Association for Computing Machinery, 2020, 16(2): 1550-4859. [8] BAEYENS W, GAO Y, et al. In situ measurements of micronutrient dynamics in open seawater show that complex dissociation rates may limit diatom growth[J]. Scientific reports, 2018, 8(1): 16125. doi: 10.1038/s41598-018-34465-w [9] CYR F, TEDETTI M, BESSON F, et al. A glider-compatible optical sensor for the detection of polycyclic aromatic hydrocarbons in the marine environment[J]. Technology Report, 2019, 6: 1-15. [10] BEGUERY L, LOSSENT J, TRICARICO R, et al. Mapping underwater noise, detection of ships and cetaceans using a SeaExplorer glider at a basin level: Feedback from the first 1000 km-long acoustic exploration of the western french mediterranean sea[J]. The Journal of the Acoustical Society of America, 2018, 144(3): 1807. [11] FOMMERVAULT O D, BESSON F, BEGUERY L, et al. Seaexplorer underwater glider: A new tool to measure depth-resolved water currents profiles[C]//OCEANS 2019-Marseille. Marseille, France: OCEANS, 2019: 1-6. [12] WENG Y, CHUN S, SRKIMORI Y, et al. Acousto-optic cooperative pointing, acquisition and tracking method for undersea laser communication[C]//OCEANS 2023. Limerick, Ireland: OCEANS, 2023: 1-4. [13] TAO Q, ZHOU Y, TONG F, et al. Evaluating acoustic communication performance of micro AUV in confined space[C]//2018 OCEANS-MTS/IEEE Kobe Techno-Oceans(OTO). Kobe, Japan: IEEE, 2018: 1-6. [14] 沈亚鹏. 受限水域KCS集装箱船岸壁效应数值研究[D]. 杭州: 浙江海洋大学, 2022. [15] 曾一凡, 李晖. 扩频通信原理[M]. 北京: 机械工业出版社, 2005. [16] 荆帅. 水下机器人动力装置设计与运动控制研究[D]. 沈阳: 沈阳工业大学, 2022. [17] TP-LINK. TL-XDN8180 1.0 产品介绍[EB/OL]. (2024-01-09)[2024-01-09]. https://resource.tp-link.com.cn/pc/docCenter/showDoc?id=1649854043758582. [18] 童峰, 周跃海, 陈东升, 等. 异构无人潜水器水声通信技术发展综述[J]. 哈尔滨工程大学学报, 2023, 44(11): 1963-1976.TONG F, ZHOU Y H, CHEN D S, et al. Advances and trends of underwater acoustic communication technology for heterogeneous unmanned underwater vehicles[J]. Journal of Harbin Engineering University, 2023, 44(11): 1963-1976. -

 下载:
下载:











 点击查看大图
点击查看大图
计量
- 文章访问数: 1226
- HTML全文浏览量: 584
- PDF下载量: 94
- 被引次数: 0
图(19) / 表(2)




