Simulation of Anti-Submarine Warfare Model of Unmanned Undersea Vehicles
-
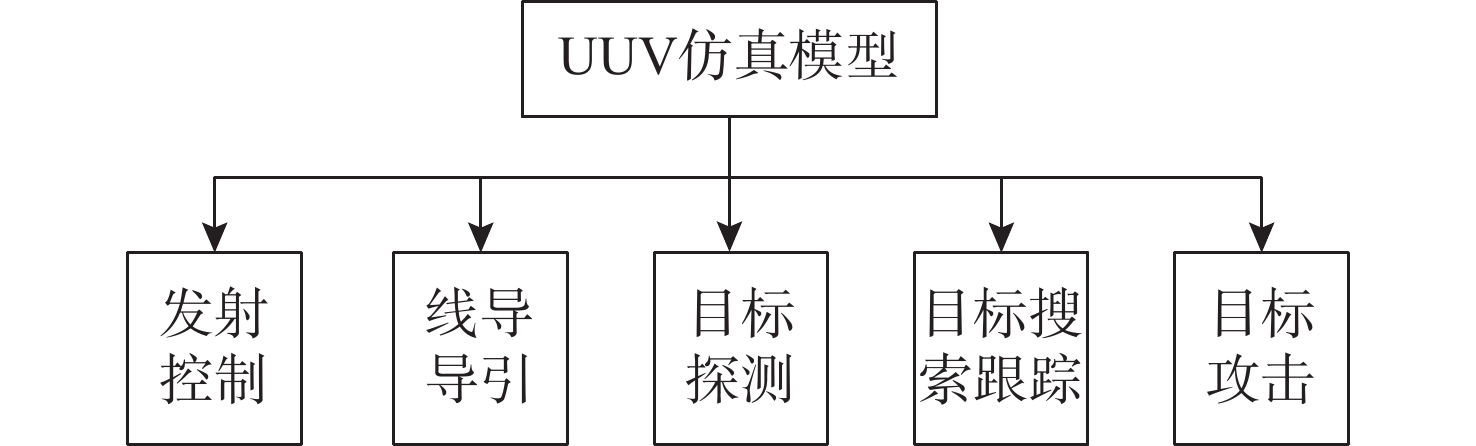
摘要: 针对反潜作战场景下建立水下武器仿真系统的需求, 文中通过分析无人水下航行器(UUV)战术特性, 依据UUV反潜战作战规则及打击任务, 依次给出了UUV发射控制、线导导引、目标探测、目标搜索跟踪和水下目标攻击等各功能子模块作战全流程, 通过各功能子模块的建模构成完整的UUV反潜作战仿真模型, 为水下对抗仿真任务提供了相应的动态链接库以便调用。经仿真验证, 构建的UUV仿真模型能够根据使用者提供的敌我位置及声学参数等战场环境信息完成水下反潜打击作战任务, 为水下武器对抗仿真系统的建立提供技术支撑。Abstract: In view of the requirement of establishing an underwater weapon simulation system in an anti-submarine warfare scenario, this paper analyzed the tactical characteristics of unmanned undersea vehicle(UUV), clarified the whole flow of the sub-modules of the UUV for warfare operations, including launch control, wire guide, target detection, target search and tracking, underwater target attack, and other functions. By modelling the various functional sub-modules, a comprehensive anti-submarine warfare simulation model of UUVs was constructed, providing a corresponding dynamic link library to be called for underwater warfare simulation missions. After simulation verification, the constructed UUV simulation model can realize the underwater anti-submarine strike mission according to the battlefield environment information provided by users, such as two-party location and acoustic parameters and provide technical support for the establishment of an underwater weapon countermeasure simulation system.
-
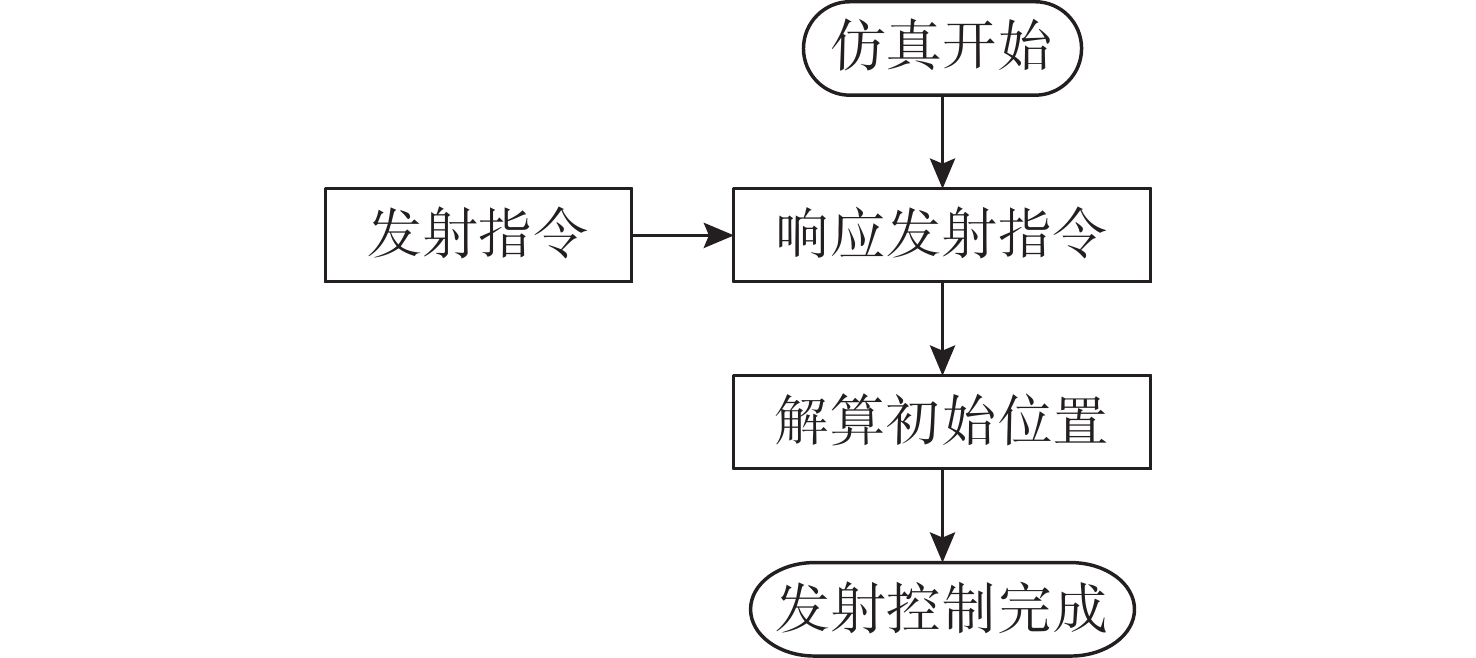
图 3 发射控制子模块仿真过程示意图
Figure 3. Flow chart of simulation process of the launch control sub-module
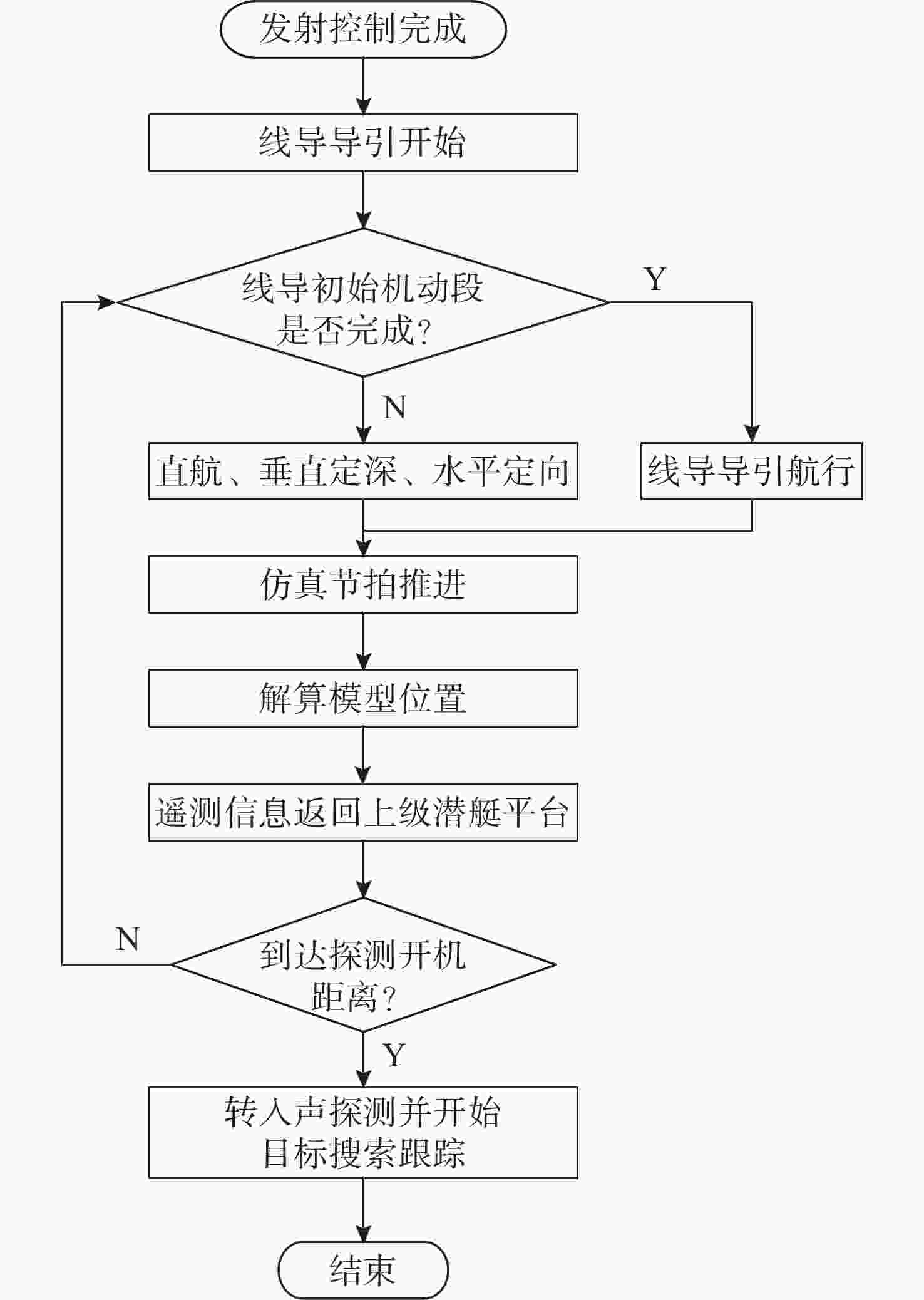
图 4 线导导引子模块仿真过程示意图
Figure 4. Flow chart of simulation process of the wire guide sub-module
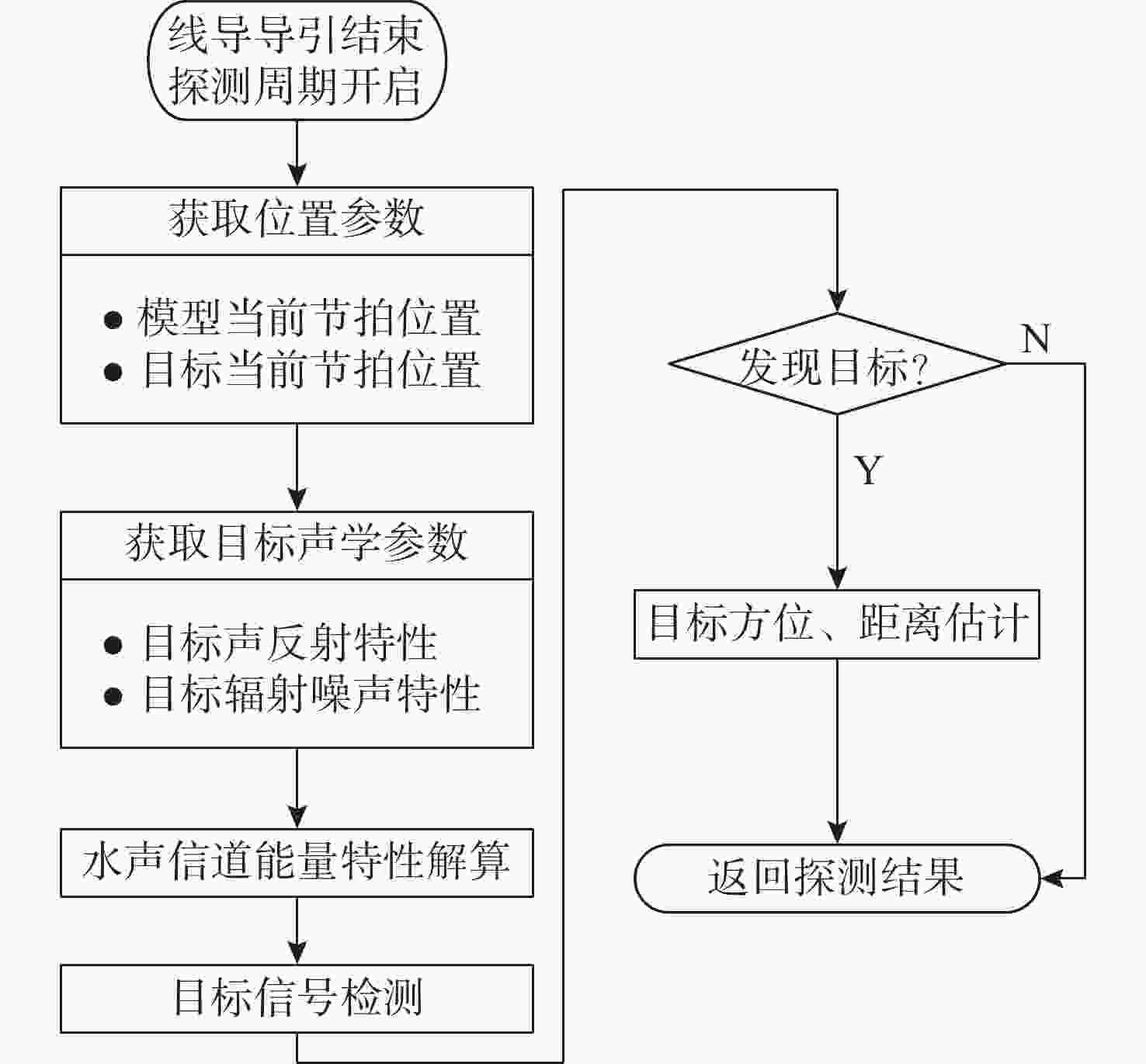
图 5 目标探测子模块仿真过程示意图
Figure 5. Flow chart of simulation process of the target detection sub-module
图 6 目标搜索跟踪子模块仿真过程示意图
Figure 6. Flow chart of simulation process of the target search and track sub-module
图 7 目标攻击子模块仿真过程示意图
Figure 7. Flow chart of simulation process of the target attack sub-module
图 8 外部模型与UUV模型调用关系图
Figure 8. Call relationship diagram between external model and UUV model
-
[1] ZHANG L Y, LIU L, ZHANG L. Research on position correction method for AUV large depth navigation based on ranging positioning[J]. Computer Communications, 2020, 150: 747-756. doi: 10.1016/j.comcom.2019.11.038 [2] 李楠, 陈练, 庞衍鹏, 等. 无人艇装备技术发展与作战运用探析[J]. 舰船科学技术, 2019, 41(23): 29-34.LI N, CHEN L, PANG Y P, et al. Analysis on key technologies evolution and application of USV[J]. Ship Science and Technology, 2019, 41(23): 29-34. [3] 徐伟, 刘锋, 普俊韬, 等. 水下无人航行器集群仿真试验系统设计与研究[J]. 舰船科学技术, 2023, 45(21): 115-118.XU W, LIU F, PU J T, et al. Design and research of unmanned underwater vehicle cluster simulation test system[J]. Ship Science and Technology, 2023, 45(21): 115-118. [4] 杨文, 马亮. UUV自航发射方法探究[J]. 舰船科学技术, 2017, 39(12): 114-117.YANG W, MA L. Research on technology of self-prorelled launching UUV[J]. Ship Science and Technology, 2017, 39(12): 114-117. [5] 常开应, 王庆云, 沈鹏, 等. 水下无人航行器空间运动建模与操纵性仿真预报[J]. 舰船科学技术, 2022, 44(17): 72-76.CHANG K Y, WANG Q Y, SHEN P, et al. Space motion modeling and maneuverability simulation prediction of underwater unmanned vehicle[J]. Ship Science and Technology, 2022, 44(17): 72-76. [6] 王莹莹, 周佳加, 赵杨, 等. 基于改进人工势场的水下无人航行器路径规划仿真研究[J]. 实验室研究与探索, 2023, 42(1): 109-113,146.WANG Y Y, ZHOU J J, ZHAO Y, et al. Research on path planning for UUV based on improved artificial potential field[J]. Research and Exploration In Laboratory, 2023, 42(1): 109-113,146. [7] 尤岳, 周涛, 陈科, 等. 水下无人航行器探潜能力建模与仿真分析[J]. 舰船科学技术, 2021, 43(19): 66-71.YOU Y, ZHOU T, CHEN K, et al. Submarine detection modeling and simulation of unmanned underwater vehicle[J]. Ship Science and Technology, 2021, 43(19): 66-71. [8] 李娟, 张建新, 杨莉娟, 等. 未知环境下UUV动态目标跟踪导引方法[J]. 水下无人系统学报, 2019, 27(3): 290-296.LI J, ZHANG J X, YANG L J, et al. Dynamic Target tracking guidance method for UUV in unknown environment[J]. Journal of Unmanned Undersea Systems, 2019, 27(3): 290-296. [9] 董鹏, 付敏飞, 周野. 美国攻击型核潜艇发展研究[J]. 舰船科学技术, 2023, 45(21): 217-221.DONG P, FU M F, ZHOU Y. American nuclar-powered attack submarine[J]. Ship Science and Technology, 2023, 45(21): 217-221. [10] 杨大伟, 张培培, 颜士坤. 国外核潜艇武器装备及其发展趋势[J]. 指挥控制与仿真, 2007, 29(5): 110-116.YANG D W, ZHANG P P, YAN S K. The weapon’s equipment of foreign nuclear submarine and its developing tendency[J]. Command Control & Simulation, 2007, 29(5): 110-116. [11] 汤伟江, 刘卫东, 高卓, 等. 水下线导航行器航路规划对导线布放可靠性的影响[J]. 水下无人系统学报, 2021, 29(6): 747-753.TANG W J, LIU W D, GAO Z, et al. Influence of route planning of underwater wire-guided vehicle on reliability of wire deployment[J]. Journal of Unmanned Undersea Systems, 2021, 29(6): 747-753. [12] 赵崇丞, 王君, 白华珍. 混合坐标系下跟踪自由段弹道导弹的优化研究[J]. 计算机仿真, 2017, 34(7): 94-98, 218. doi: 10.3969/j.issn.1006-9348.2017.07.020ZHAO C C, WANG J, BAI H Z. An optimized survey on the tracking of ballistic missile at free-flight phase in mixed coordinate system[J]. Computer Simulation, 2017, 34(7): 94-98, 218. doi: 10.3969/j.issn.1006-9348.2017.07.020 [13] 李志舜. 现代鱼雷自导系统及其发展趋势[J]. 鱼雷技术, 1999, 7(1): 6-9.LI Z S. Modern torpedo homing system and its development trend[J]. Torpedo Technology, 1999, 7(1): 6-9. [14] 郝保安, 孙起, 杨云川, 等. 水下制导武器[M]. 北京: 国防工业出版社, 2014. [15] 石秀华, 许晖, 韩鹏, 等. 水下武器系统概论[M]. 西安: 西北工业大学出版社, 2013. -

 下载:
下载:






 点击查看大图
点击查看大图
计量
- 文章访问数: 1274
- HTML全文浏览量: 488
- PDF下载量: 175
- 被引次数: 0