Clock Synchronization Algorithm of UAV-USV-UUV Cross-Domain Cooperation
-
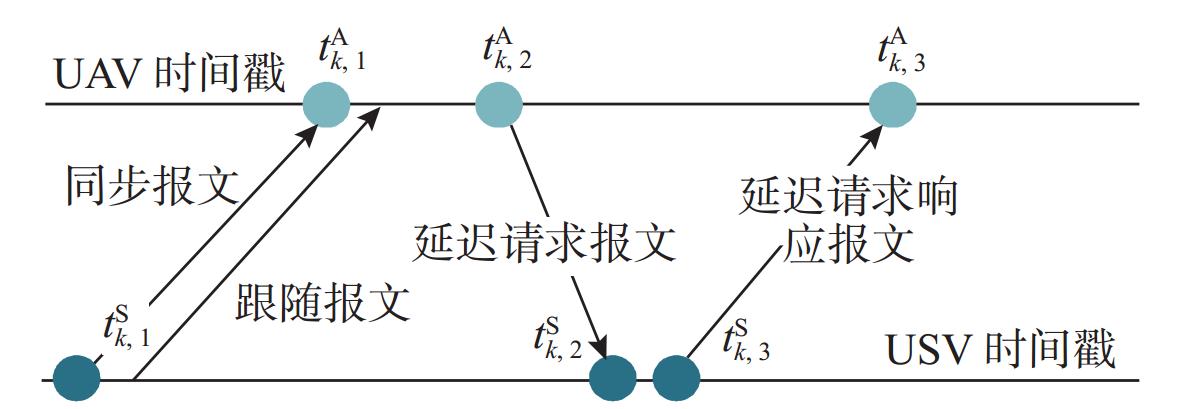
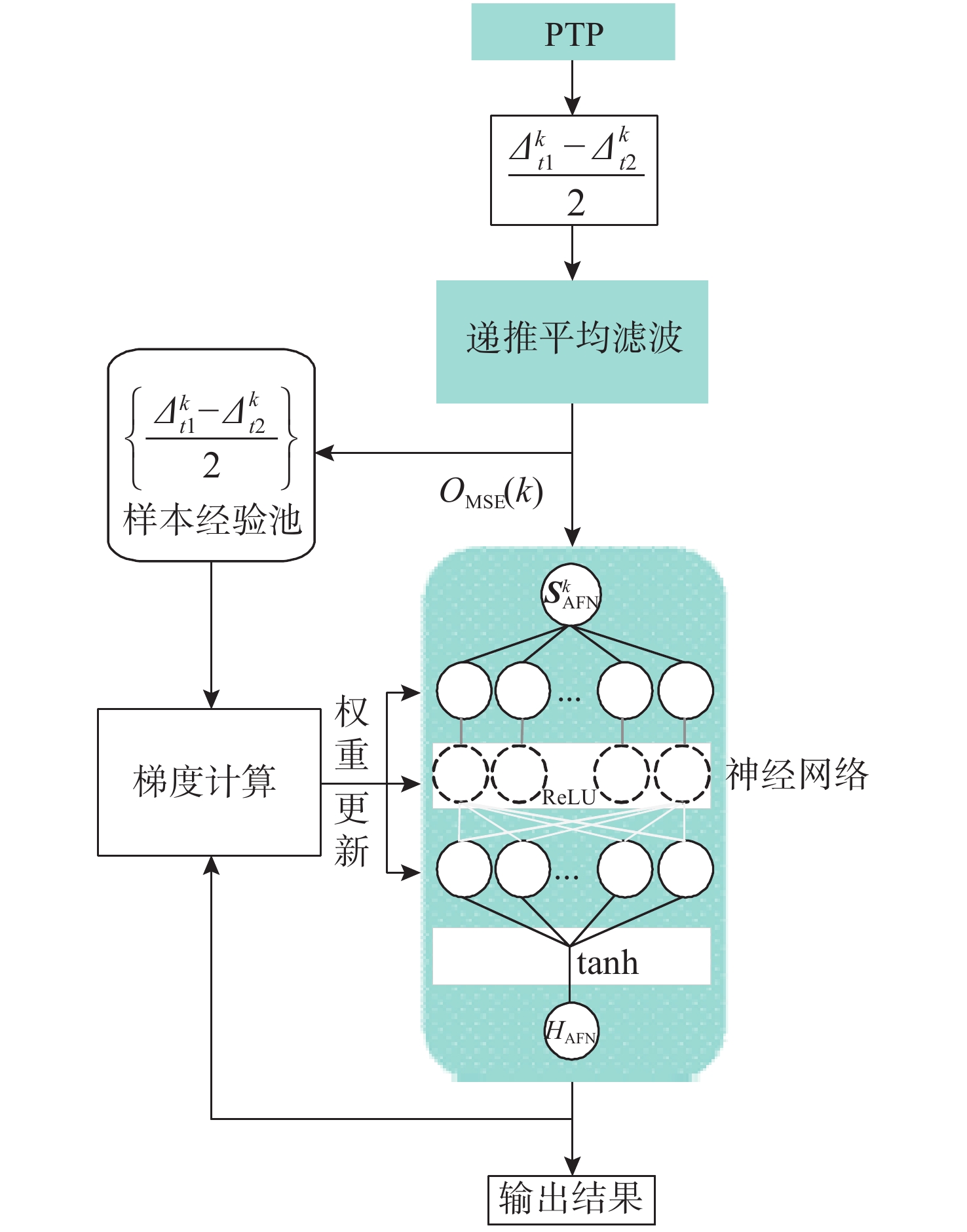
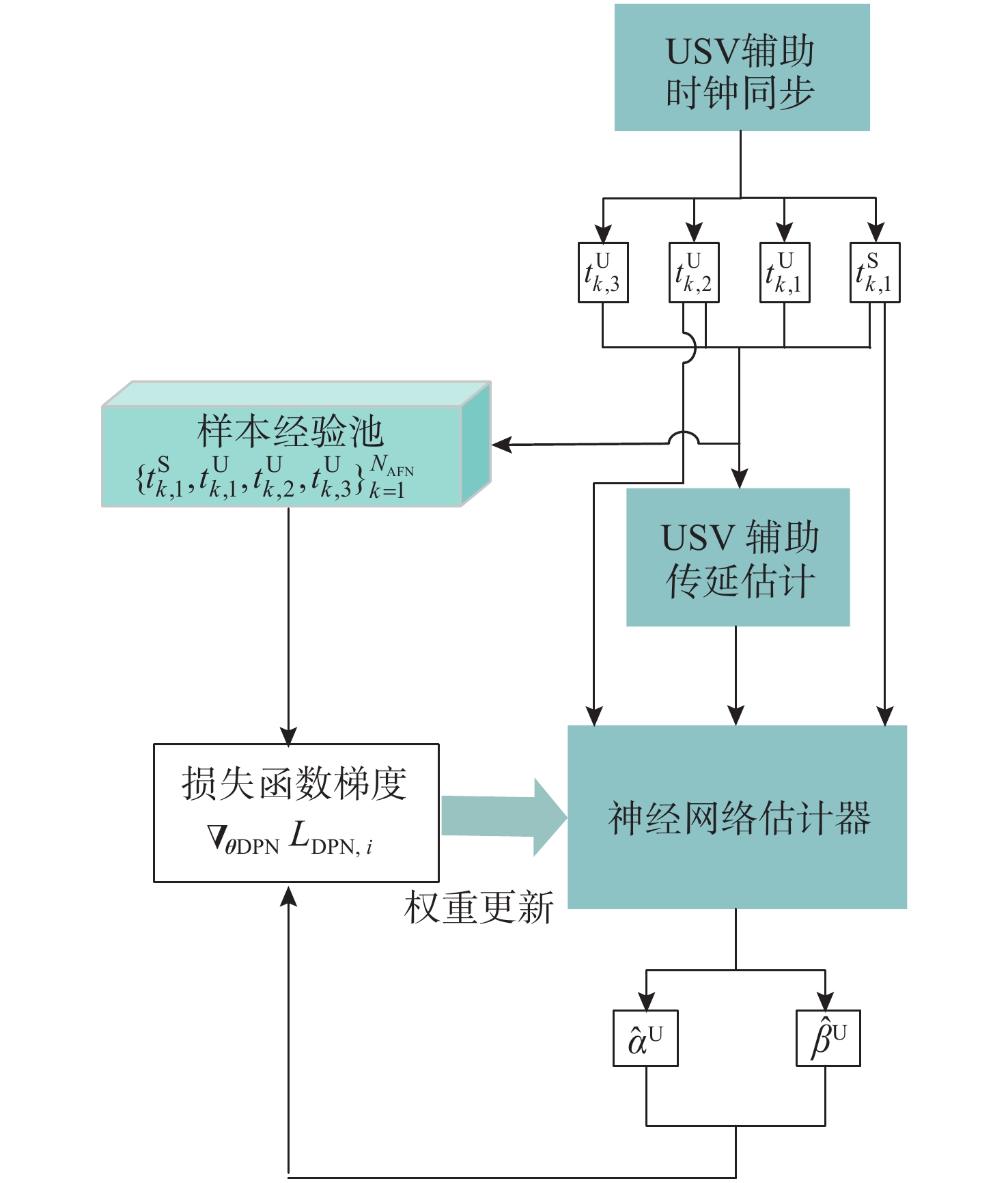
摘要: 随着海洋科学技术的发展, 水下任务更加强调跨平台系统的协作, 然而不同应用场景对时钟同步的要求不同, 由于水下通信的弱通信与高延迟, 对涉及多场景的异构系统, 需要新的同步方法。针对随机时延影响下的全网时钟同步问题, 文中提出了基于神经网络的无人机(UAV)-无人水面艇(USV)-无人水下航行器(UUV)跨域协同的时钟同步算法。首先, 考虑随机时延影响, 将USV时钟作为基准时钟; 其次, 通过递推滤波和神经网络对UAV时钟偏差进行校正; 最后, USV辅助UUV估计水下的长时延, 设计了神经网络算法估计时钟漂移和时钟偏移。通过仿真验证了上述算法的有效性。Abstract: With the development of marine science and technology, underwater missions have placed greater emphasis on the collaboration of cross-platform systems. However, different application scenarios have varying requirements for clock synchronization. Due to the weak communication and high time delay of underwater communication, a new synchronization method is required for heterogeneous systems involving multiple scenarios. With regard to the problem of global time synchronization under the influence of random time delay, a neural network-based time synchronization algorithm for cross-domain cooperation of unmanned aerial vehicles(UAVs), unmanned surface vessels(USVs), and unmanned undersea vehicles(UUVs) was proposed. First, the impact of random time delay was considered, and the clock of USVs was used as the reference clock. The clock offset of UAVs was corrected through recursive filtering and a neural network. Finally, with the assistance of USVs, the underwater long time delay was estimated by UUVs, and a neural network algorithm was designed to estimate clock drift and clock skew. The effectiveness of the proposed algorithm was verified through simulation.
-
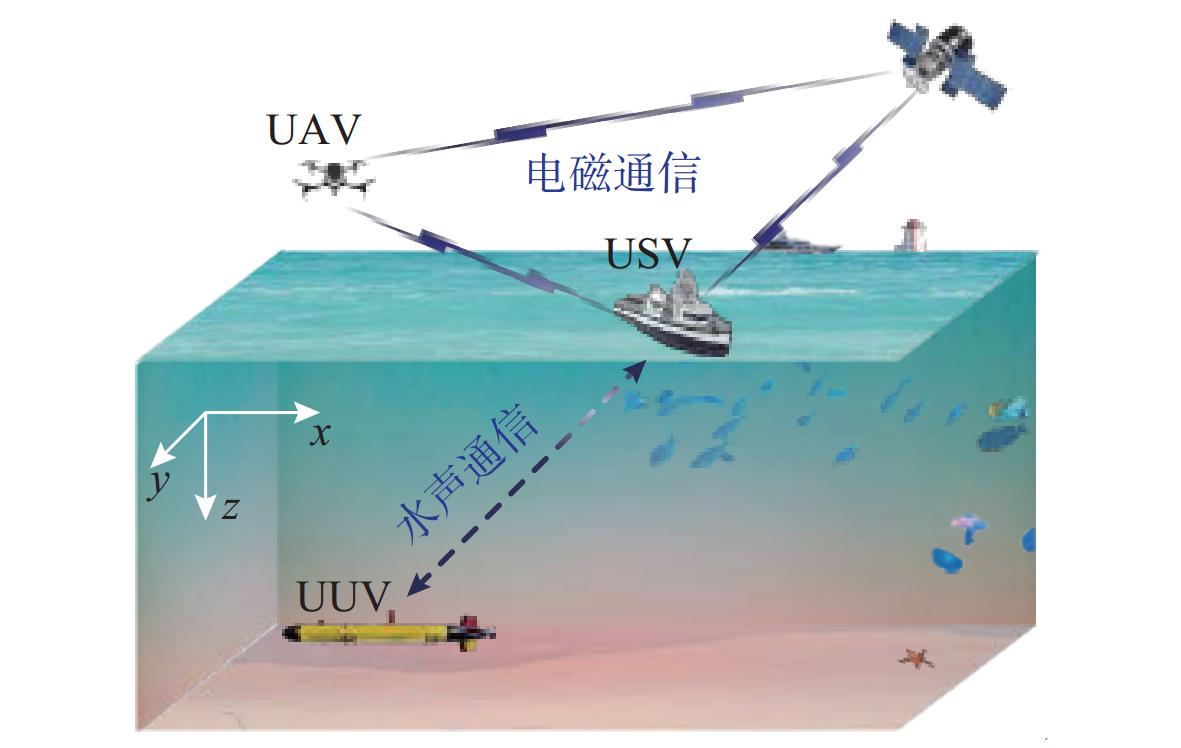
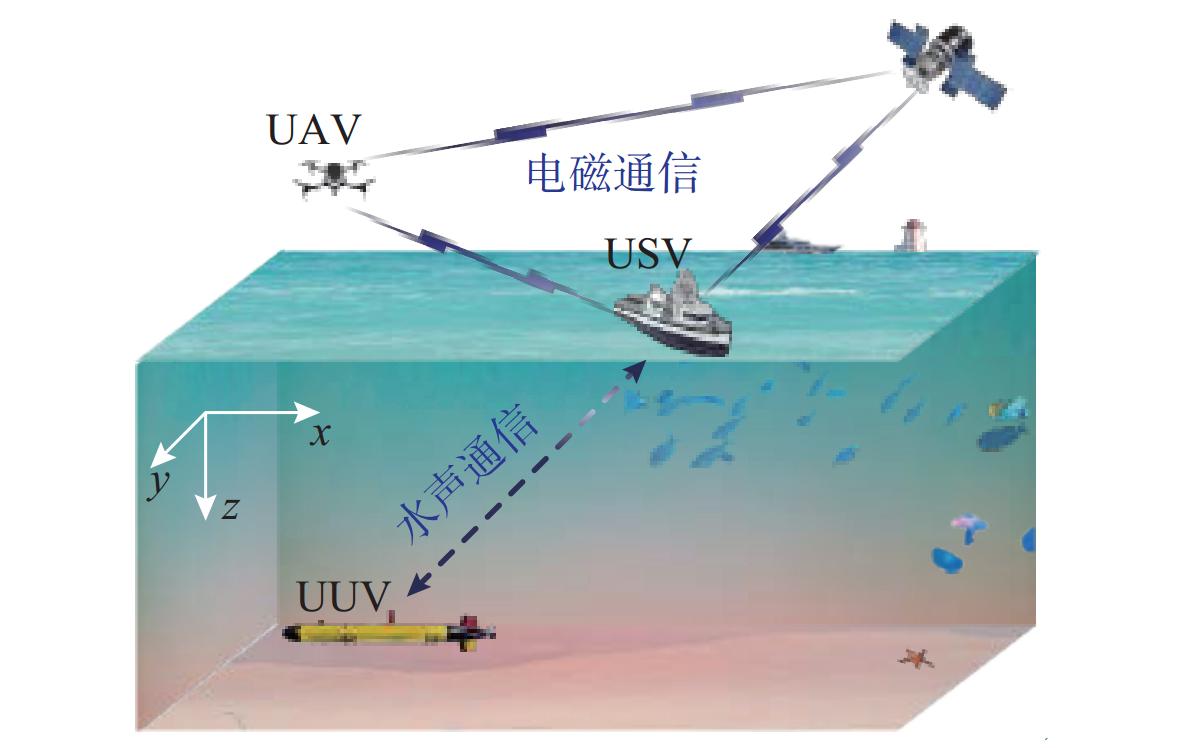
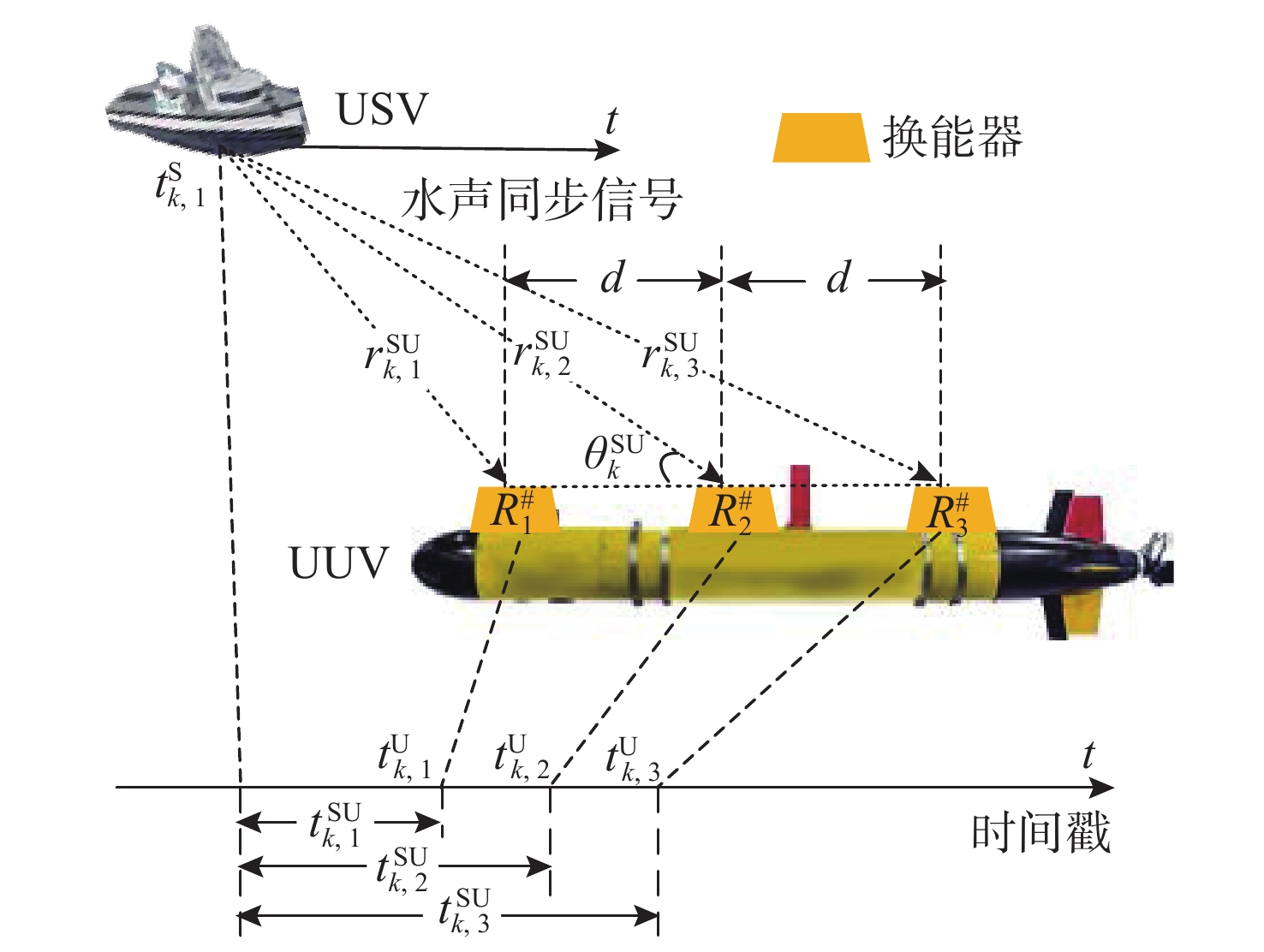
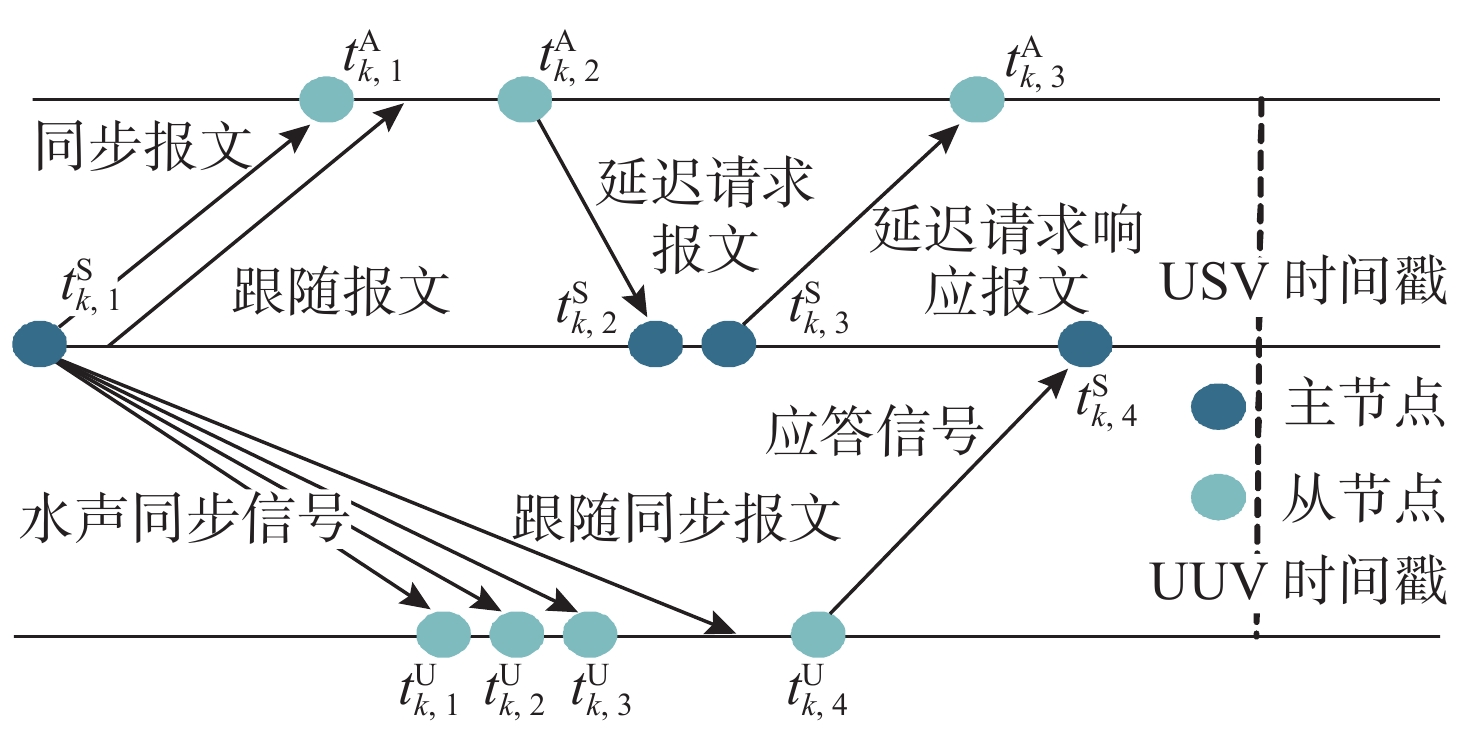
图 1 UAV-USV-UUV跨域同步场景
Figure 1. Cross-domain synchronisation scenario of the UAV-USV-UUV
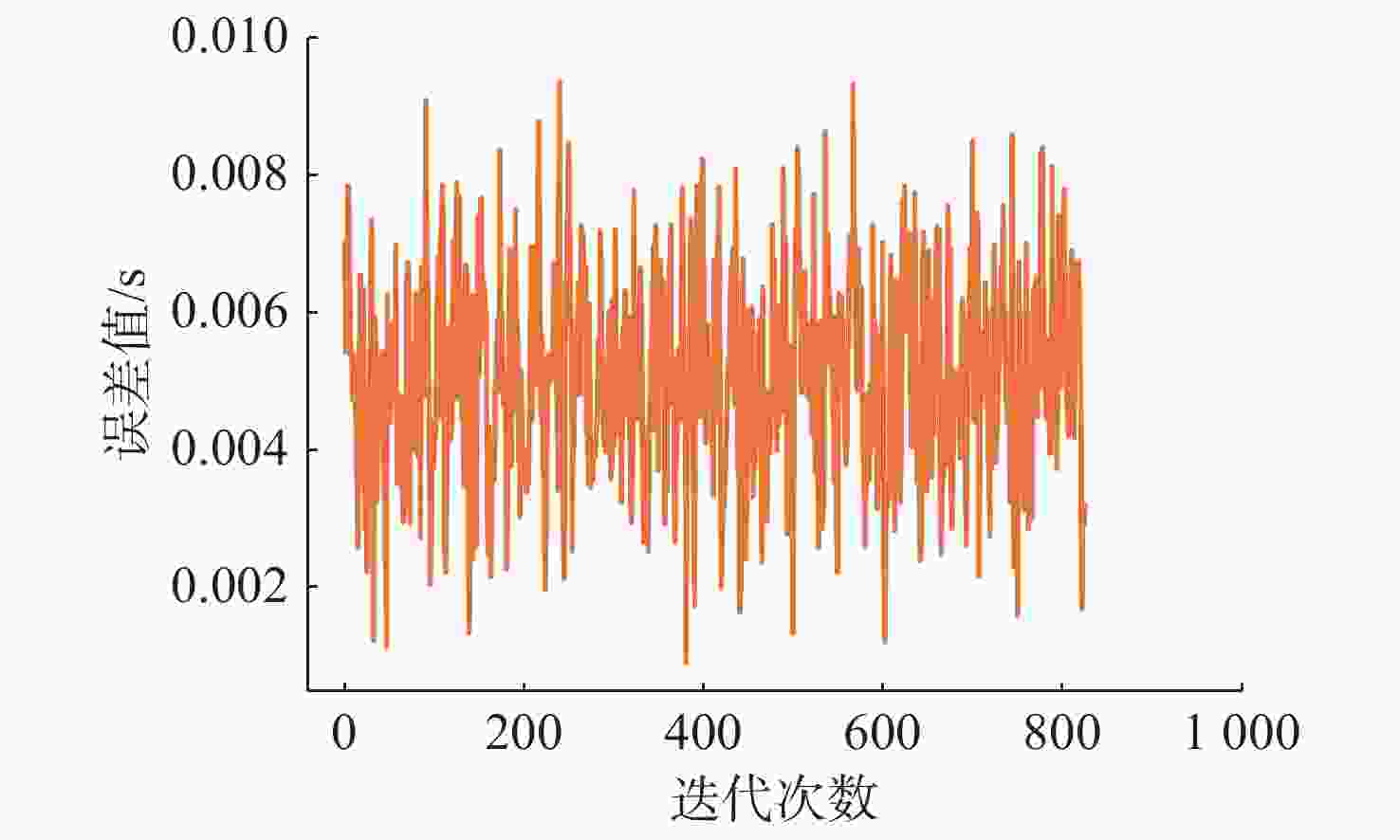
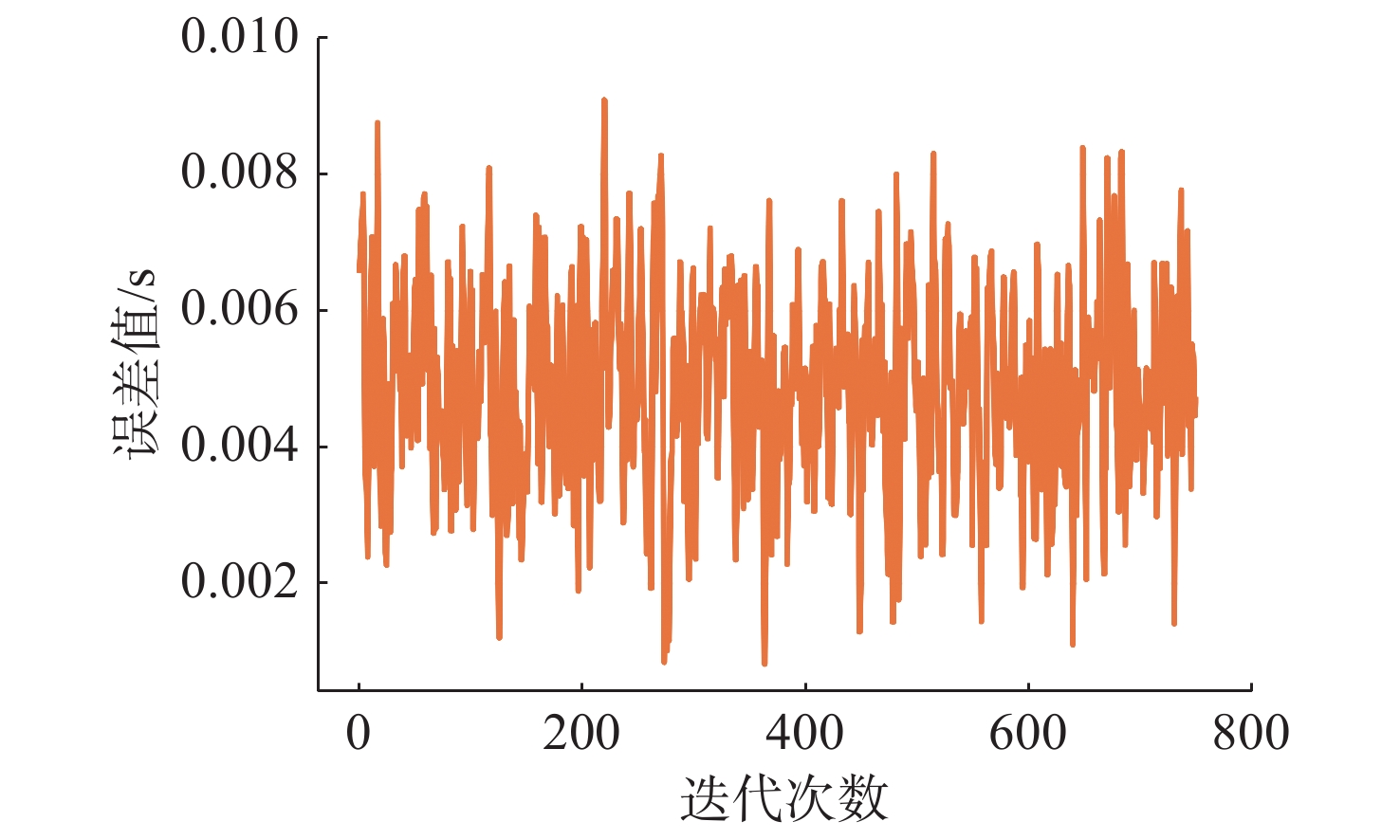
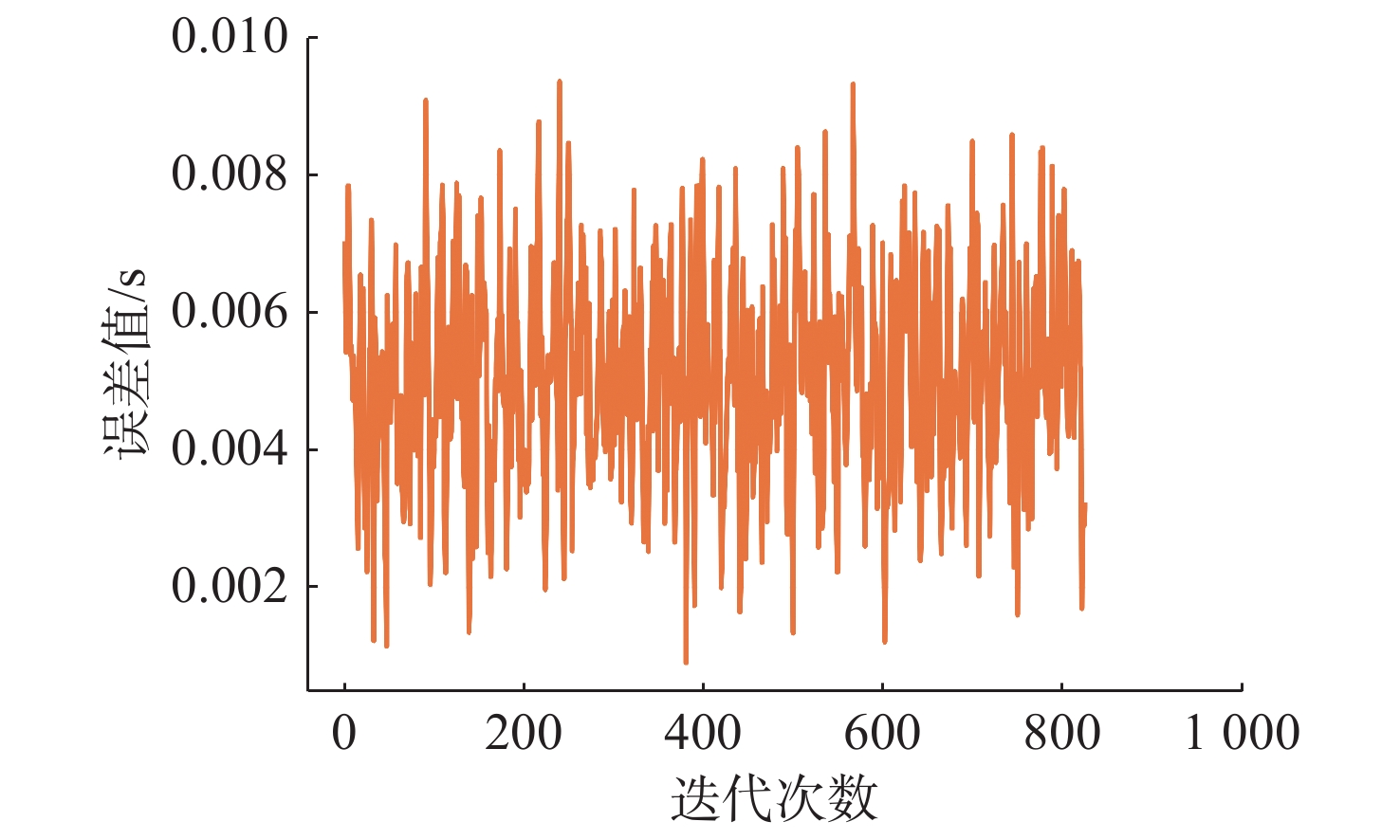
图 18 干扰放大后最小二乘法误差曲线
Figure 18. Error curve of least squares after interference amplification
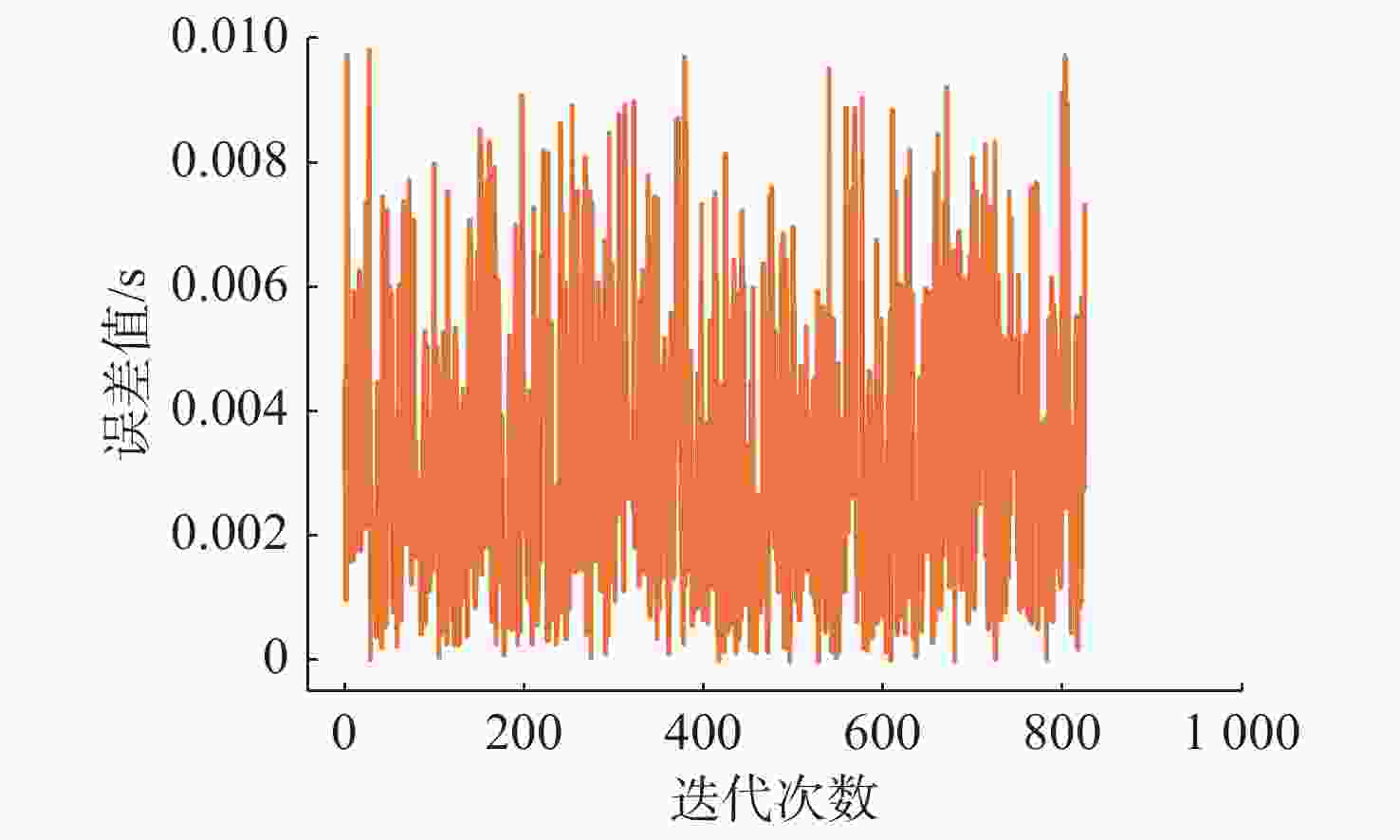
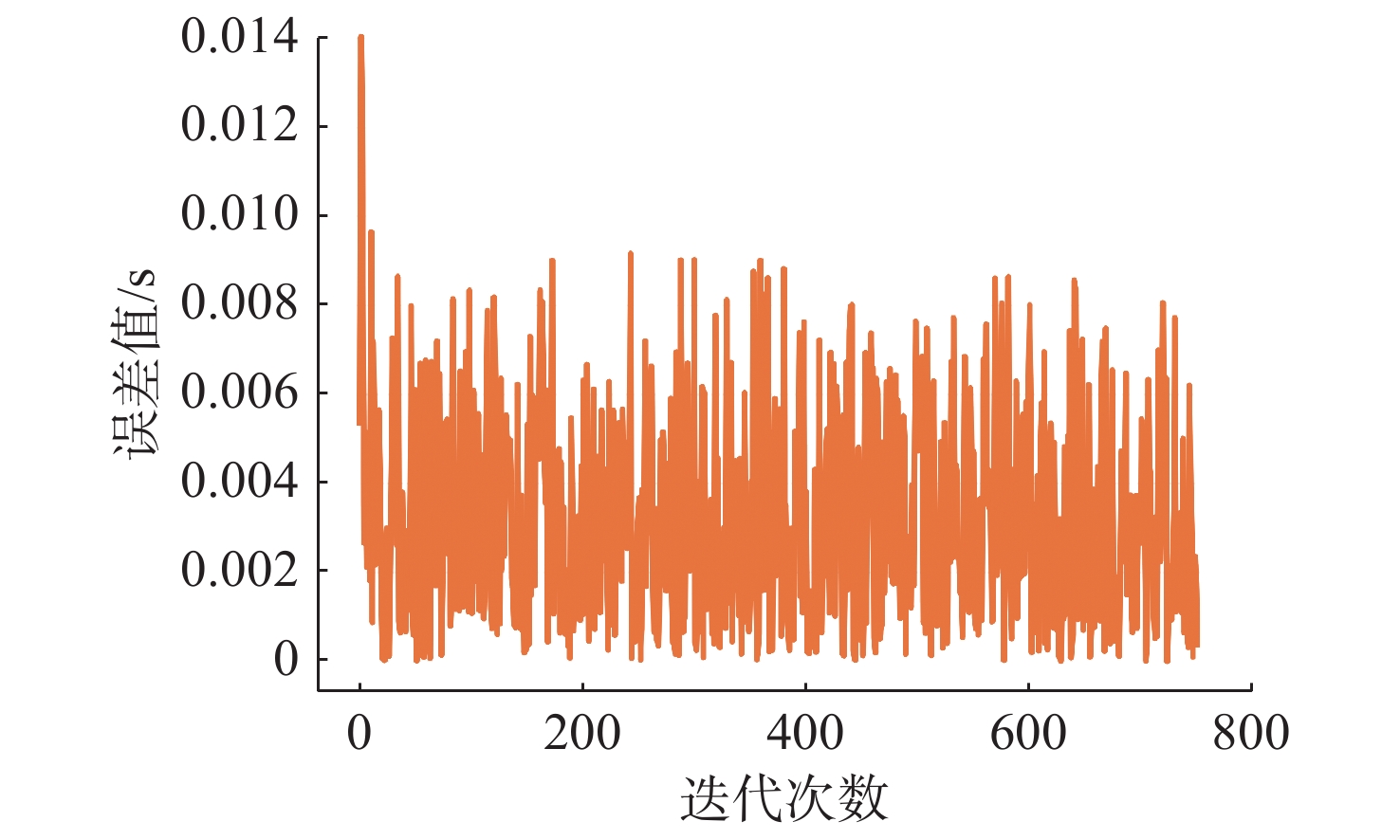
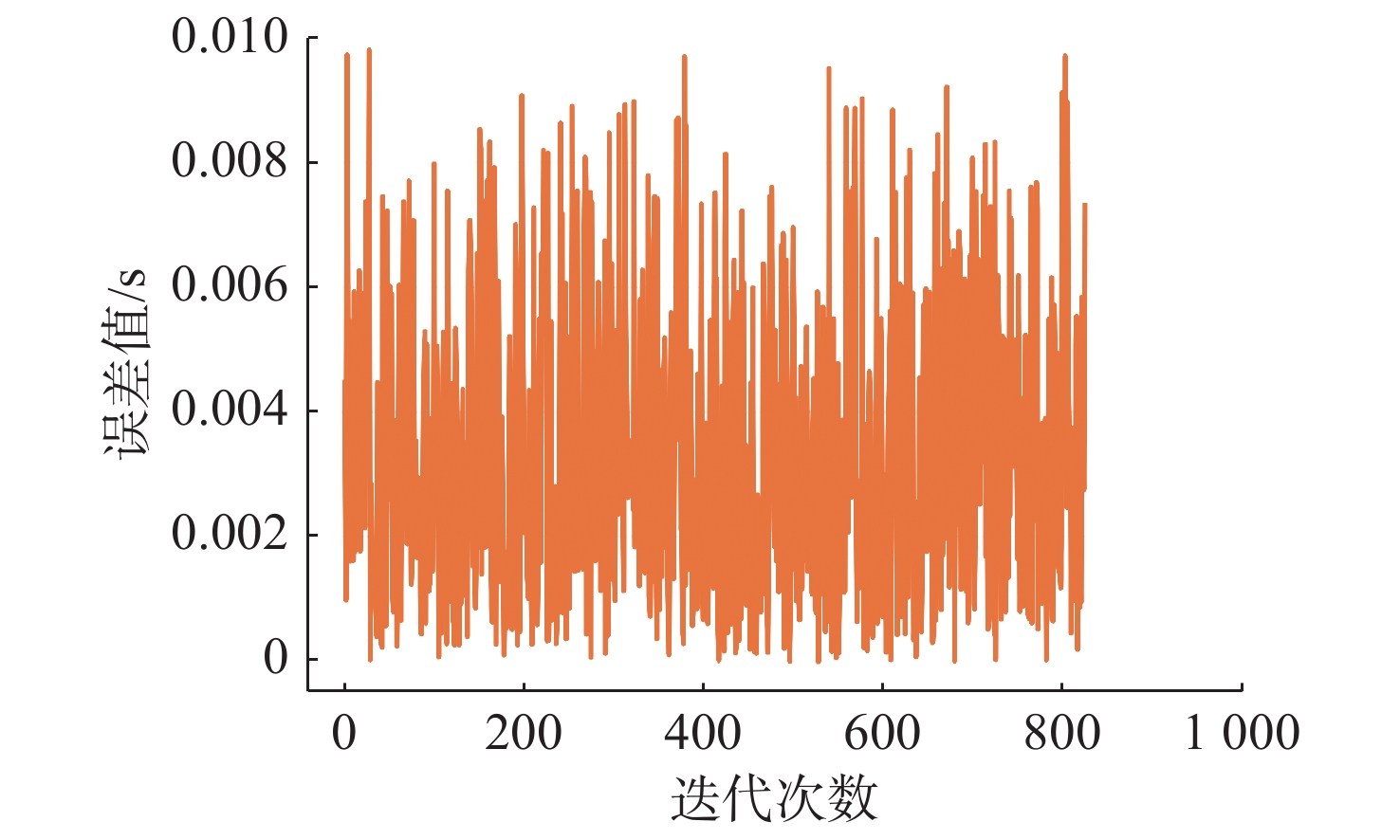
图 19 干扰放大后TSHL算法误差曲线
Figure 19. Error curve of TSHL algorithm after interference amplification
表 1 参数列表
Table 1. Parameter list
名称 参数 数值 时钟偏差/s $ \mathit{O}_k^{\text{A}} $ 0.02 漂移系数/s $ {\alpha ^{\text{U}}} $ 0.001 时钟偏移/s $ {\beta ^{\text{U}}} $ 0.02 学习率 $ {\alpha _{{\text{DPN}}}} $ 0.000 08 样本数量 $ {N_{{\text{AFN}}}} $、$ N_{\text{DPN}} $ 256 队列长度 $ {N_{{\text{AF}}}} $ 10 学习率 $ {\alpha _{{\text{AFN}}}} $ 0.002 5 采样周期/s T 0.05 随机误差/s $\delta $ 0~0.01  下载: 导出CSV
下载: 导出CSV
-
[1] YAN J, ZHANG X, LUO X, et al. Asynchronous localization with mobility prediction for underwater acoustic sensor networks[J]. IEEE Transactions on Vehicular Technology, 2018, 67(3): 2543-2556. doi: 10.1109/TVT.2017.2764265 [2] ZHU W, XU Z, WU Y, et al. Energy-based trajectory tracking control of under-actuated unmanned surface vessels[J]. Ocean Engineering, 2023, 288(P2):116166. [3] YAN J, WANG H, YANG X, et al. Optimal rigid graph-based cooperative formation control of AUVs in anchor-free environments[J]. IEEE Transactions on Intelligent Vehicles, 2023: 1-16. [4] 冯冬芹, 沈佳骏, 褚健. 基于有色Petri网的时钟同步协议安全性分析[J]. 控制与决策, 2014, 29(12): 2144-2150.FENG D Q, SHEN J J, CHU J. Analysis of clock syn-chronization protocol security using colored Petri net[J]. Control and Decision, 2014, 29(12): 2144-2150. [5] PARK S M, KIM H J, KIM H W, et al. Synchronization improvement of distributed clocks in EtherCAT networks[J]. IEEE Communications Letters, 2017, 21(6): 1277-1280. doi: 10.1109/LCOMM.2017.2668400 [6] AYUSH G, AKASH Y, AXEL S, et al. Wireless precision time protocol[J]. IEEE Communications Letters, 2018, 22(4): 812-815. doi: 10.1109/LCOMM.2017.2781706 [7] JIN X, AN J, DU C, et al. Frequency-offset information aided self time synchronization scheme for high-dynamic multi-UAV networks[J]. IEEE Transactions on Wireless Communications, 2024, 23(1): 607-620. doi: 10.1109/TWC.2023.3280536 [8] SU X, HUI B, CHANG K. Multi-hop clock synchronization based on robust reference node selection for ship ad-hoc network[J]. Journal of Communications and Networks, 2016, 18(1): 65-74. doi: 10.1109/JCN.2016.000009 [9] 高婧洁, 申晓红, 王海燕. 单锚节点水声网络高精度低开销初始化方法[J]. 系统工程与电子技术, 2017, 39 (2): 425-430. doi: 10.3969/j.issn.1001-506X.2017.02.29 [10] KEBKAL G K, KEBKAL V K, KEBKAL O G, et al. Underwater acoustic modems(S2CR series) for synchronization of underwater acoustic network clocks during payload data exchange[J]. IEEE Journal of Oceanic Engineering, 2016, 41(2): 428-439. doi: 10.1109/JOE.2015.2431531 [11] HAO C, SONG P, YANG C, et al. Testing a firefly-inspired synchronization algorithm in a complex wireless sensor network[J]. Sensors, 2017, 17(3): 544. doi: 10.3390/s17030544 [12] Liu J, WANG Z H, ZUBA M, et al. DA-Sync: A Doppler-assisted time-synchronization scheme for mobile underwater sensor networks[J]. IEEE Transactions on Mobile Computing, 2014, 13(3): 582-595. doi: 10.1109/TMC.2013.13 [13] HE J, PENG C, SHI L, et al. Time synchronization in wsns: A maximum-value-based consensus approach[J]. IEEE Transactions on Automatic Control, 2014, 59(3): 660-675. doi: 10.1109/TAC.2013.2286893 [14] 吕鹏程, 张霞, 李鸥. 基于最大似然估计的平均一致性时钟同步改进算法[J]. 信息工程大学学报, 2022, 23(5): 537-545. doi: 10.3969/j.issn.1671-0673.2022.05.004 [15] 余世明, 周景远, 何德峰, 等. 随机有界通信时延下传感器网络中的一致性时钟同步算法[J]. 控制与决策, 2020, 35(5): 1159-1166. [16] ABAKASANGA E, SHLEZINGER N, DABORA R, et al. Unsupervised deep-learning for distributed clock synchronization in wireless networks[J]. IEEE Transactions on Vehicular Technology, 2023, 72(9): 12234-12247. doi: 10.1109/TVT.2023.3269381 [17] 魏连锁, 李华, 吴迪, 等. 基于BP神经网络模型时钟同步误差补偿算法[J]. 物理学报, 2021, 70(11): 143-153. [18] KUMAR S M, SWATHIKA R. Multi-objective stochastic gradient based ADR mechanism for throughput and latency optimization in LoRaWAN[J]. International Journal of Sensors, Wireless Communications and Control, 2023, 13(6): 403-417. doi: 10.2174/0122103279272388231026062241 [19] SYED A A, HEIDEMANN J. Time synchronization for high latency acoustic networks[C]//25th IEEE International Conference on Computer Communications. Barcelona, Spain: IEEE, 2006: 1-12. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 879
- HTML全文浏览量: 225
- PDF下载量: 177
- 被引次数: 0