

Research of Trans-Medium Strategy for Unmanned Aerial-Undersea Vehicles
-
摘要: 水空跨介质航行器(UAUV)在军民领域均有广阔的应用前景, 近年来成为机器人领域的热点研究对象。文章详细介绍了现有的仿生式、旋翼式、固定翼式和混合式UAUV样机研制现状, 并对其出入水策略进行了综述。总结出UAUV研究中面临的重要问题, 包括仿生构型的优化设计、跨介质过程稳定控制以及动力选择等, 为后续跨介质航行器的研究发展提供借鉴。Abstract: Unmanned aerial-undersea vehicles(UAUVs), with broad application prospects in both military and civilian fields, have gradually become a research hotspot in the field of robotics in recent years. UAUVs were taken as the research object in this study, and the development status of the bionic, multirotor, fixed-wing, and hybrid UAUV prototypes were discussed. In addition, the water-entry/exit strategies of the prototypes were reviewed. The important issues faced in the research on UAUVs were summarized, including the optimal design of bionic configuration, stability control during the trans-medium process, and propulsion selection, providing a reference for the subsequent research and development of trans-medium vehicles.
-
表 1 自然界中各种动物跨介质运动特点
Table 1. Characteristics of trans-medium locomotion of various animals in nature
动物 出水方式 出水角度/(°) 出水速度/(m/s) 入水方式 入水角度/(°) 入水速度/(m/s) 体长特征/cm 出入水瞬间 翠鸟 拍打翅膀 60~75 — 溅落 45~60 2~4 体长15~28
翼展20~25
鲣鸟 拍打翅膀 60~90 — 溅落 30~45 5~8 体长60~100
翼展152~158
鸬鹚 拍打翅膀 ≈45 — 滑落 60~90 3~5 体长60~80
翼展80~90
塘鹅 拍打翅膀 60~90 — 滑落 45~60 4~6 体长140~175
翼展≈200
飞鱼 喷射 30~65 ≈18 滑落 20~30 10~15 体长≈45
翼展≈65
剑鱼 拍打尾鳍和胸鳍 30~65 ≈36 溅落 45~60 8~12 体长≈210 
飞行乌贼 喷射 50~80 ≈25 滑落 90~180 1~2 体长≈20 
海豚 拍打尾鳍和胸鳍 20~90 ≈10 溅落 30~60 2~5 体长100~950 
 下载: 导出CSV
下载: 导出CSV
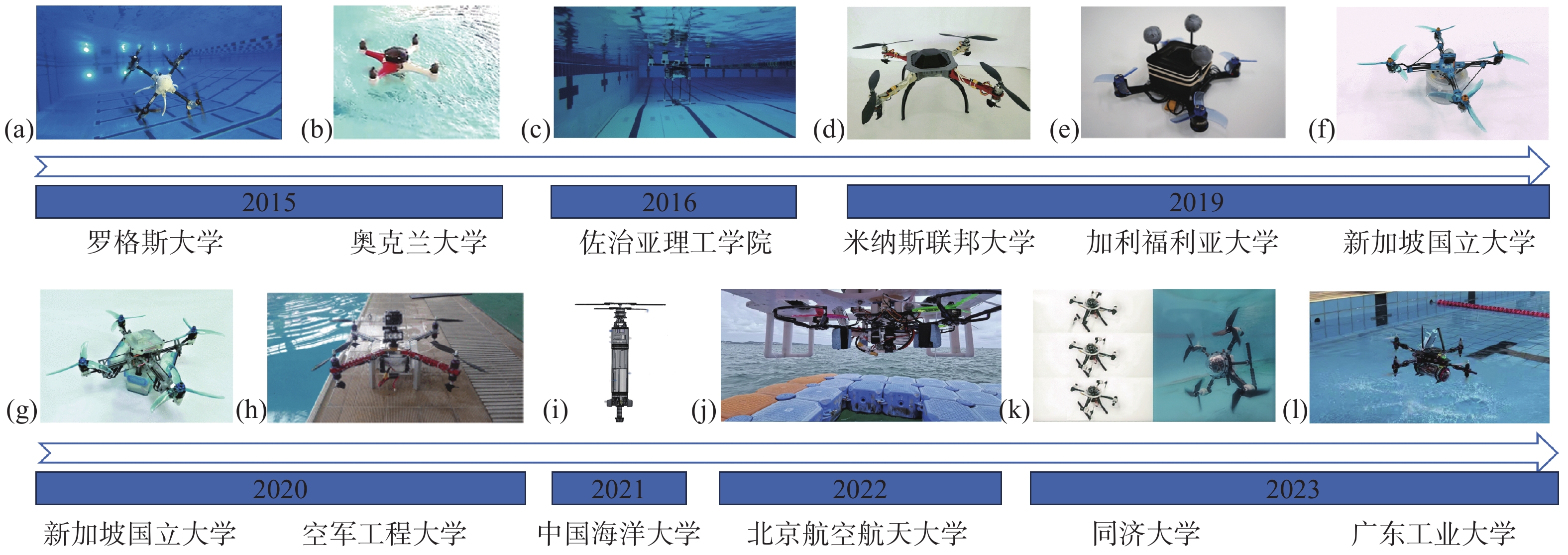
表 2 水空跨介质航行器出入水策略
Table 2. Water entry and exit strategies of aerial-aquatic vehicles
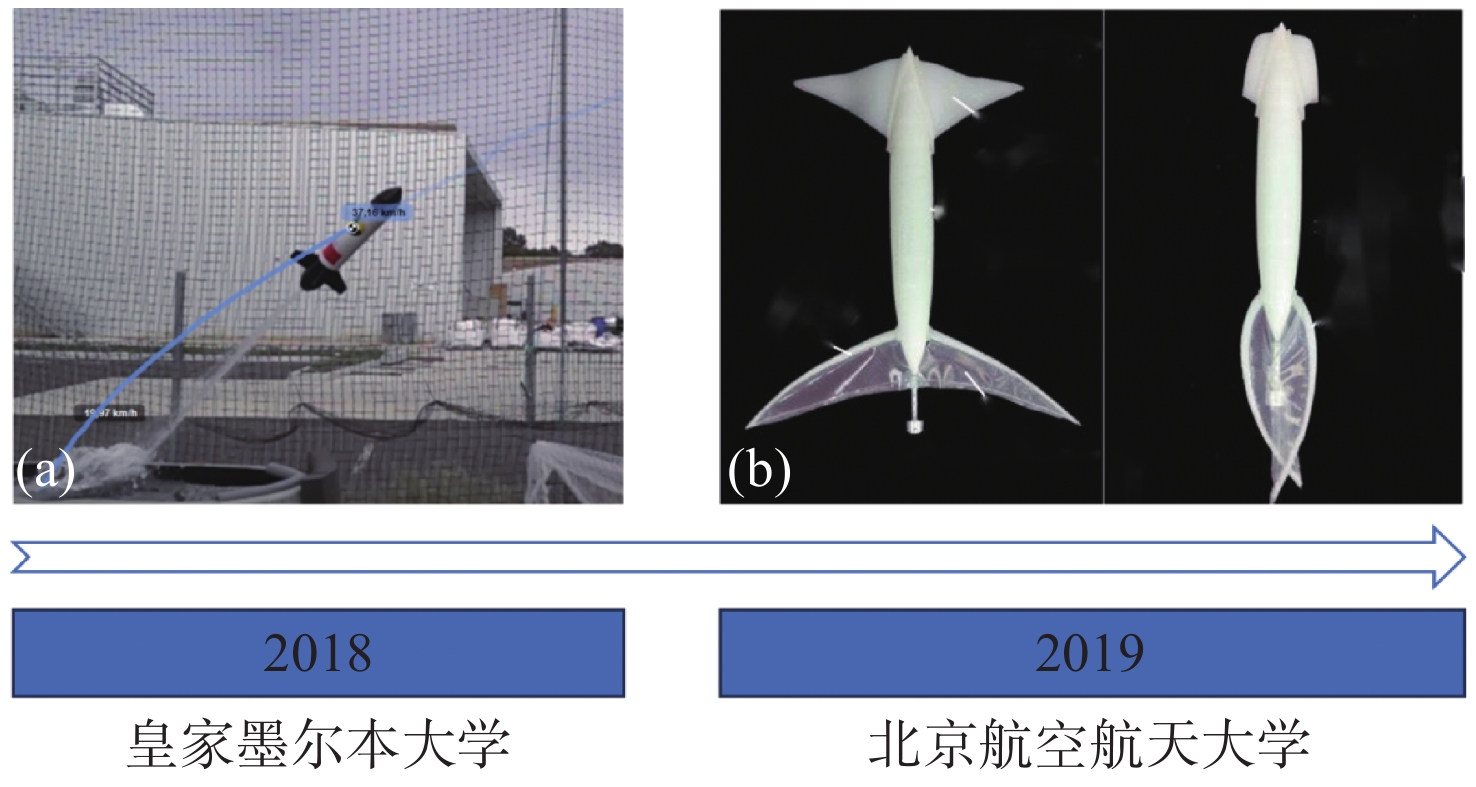
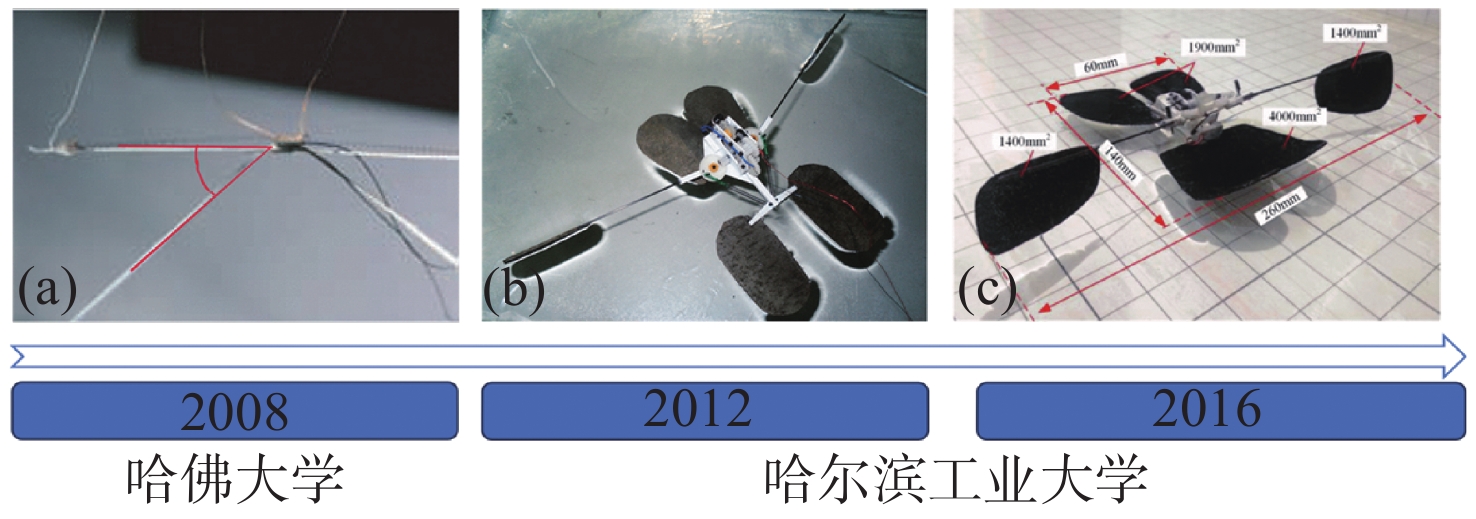
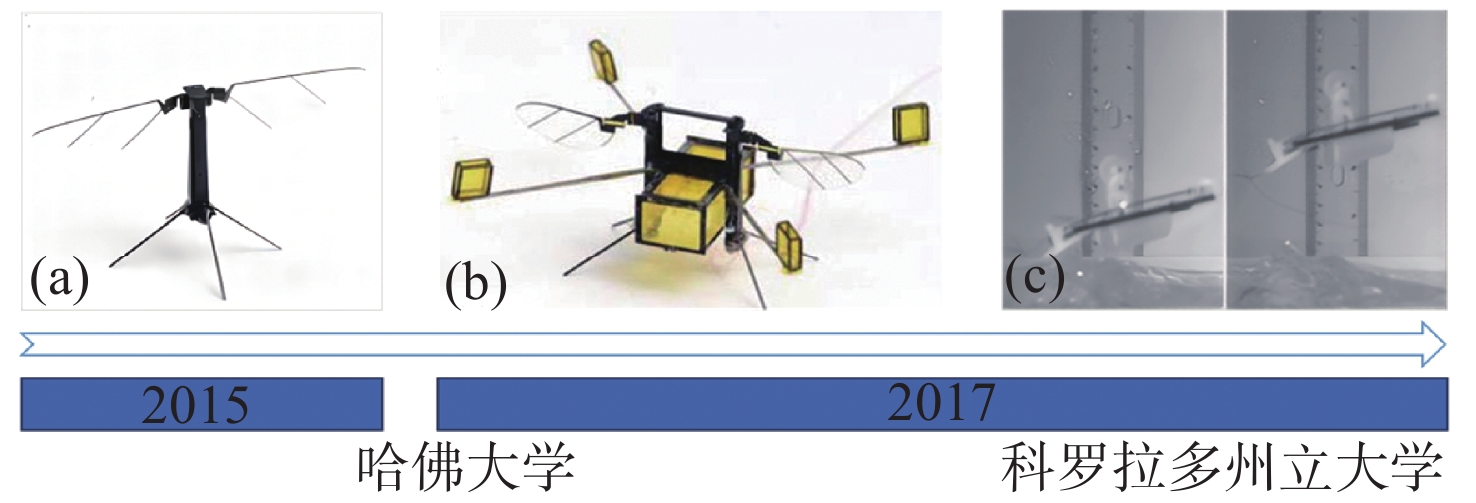
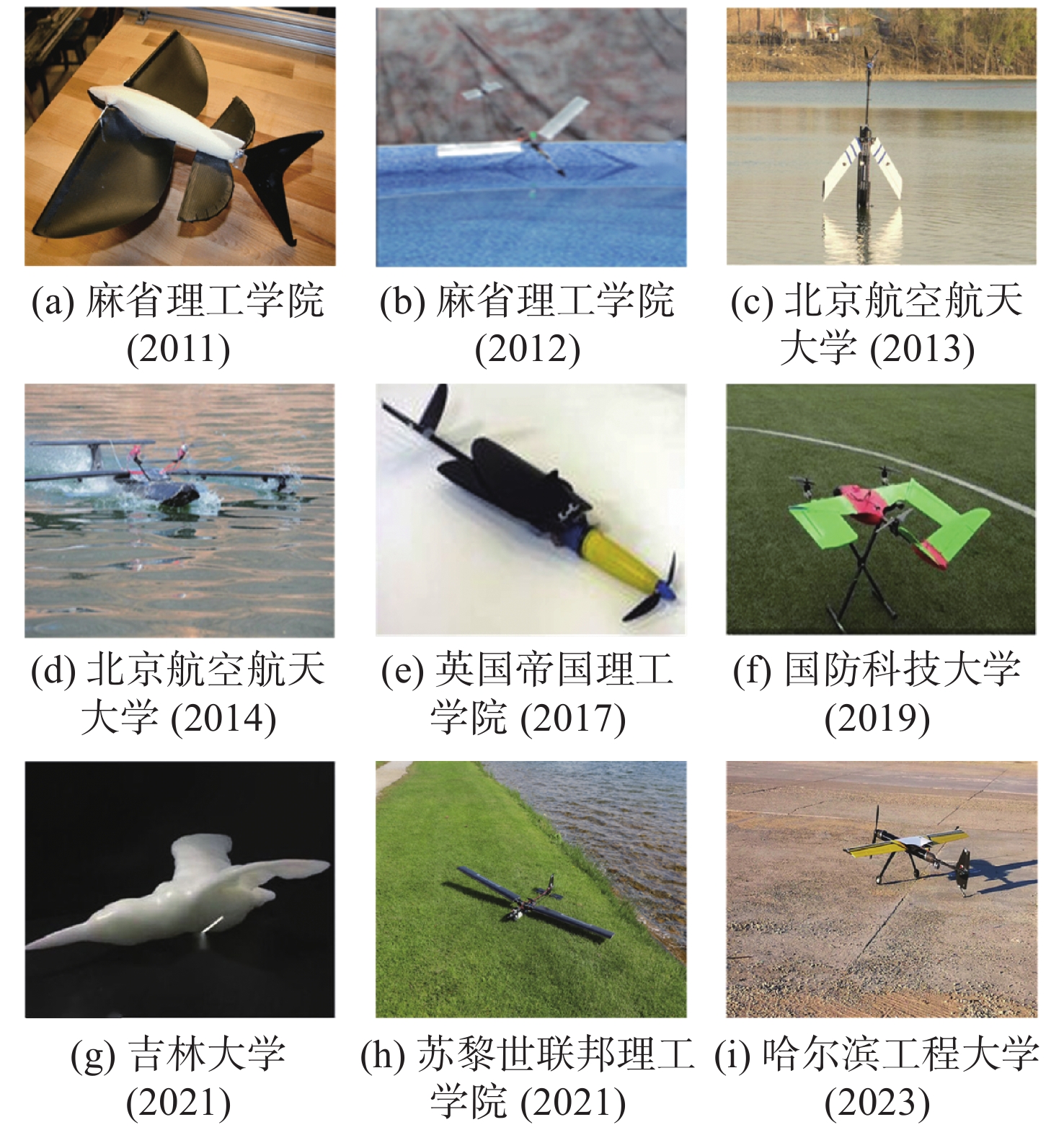
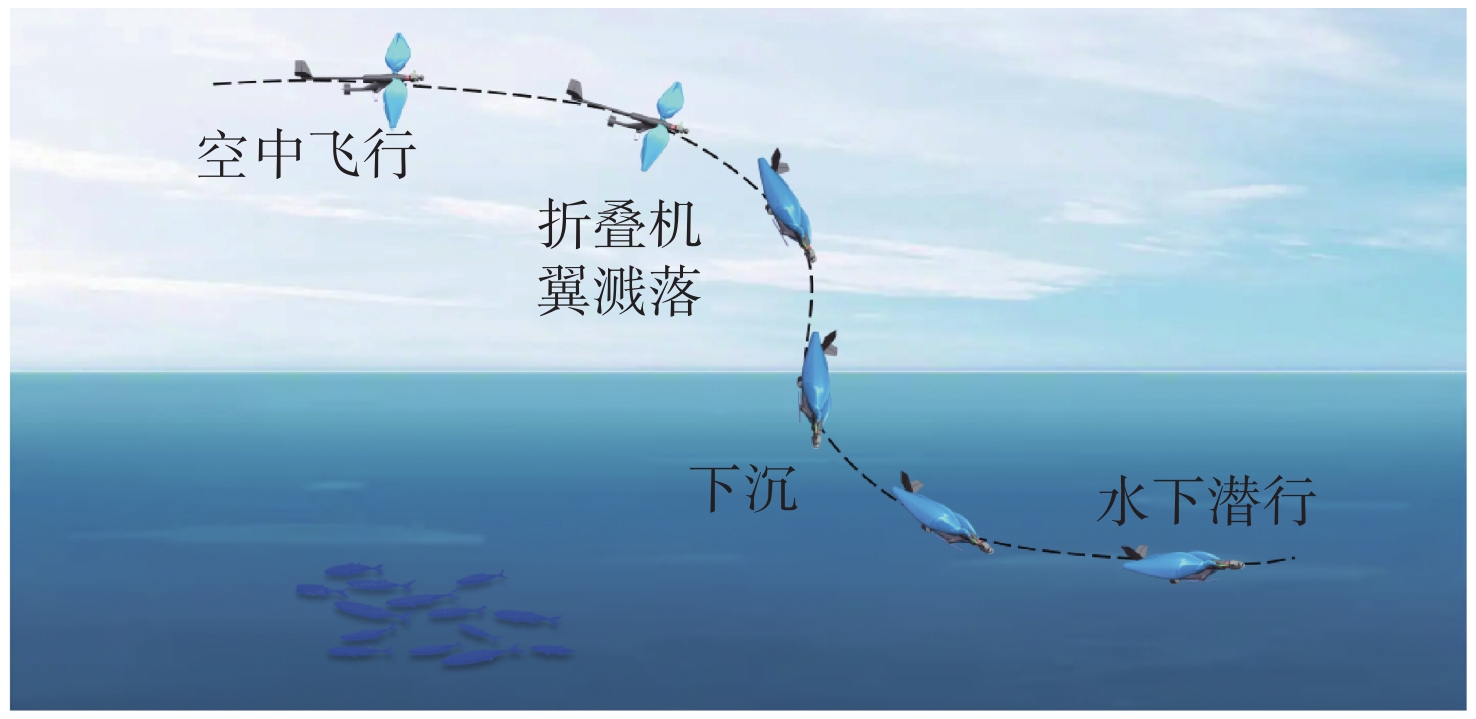
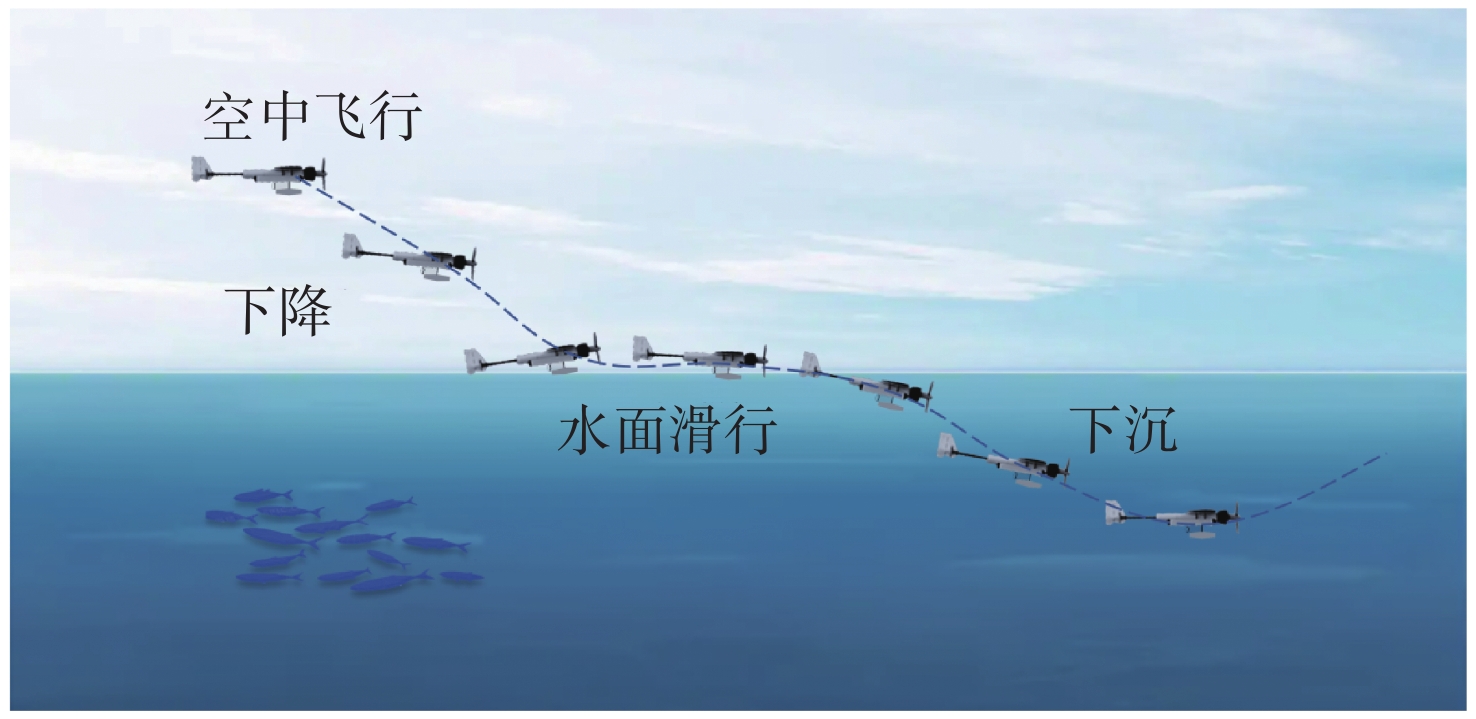
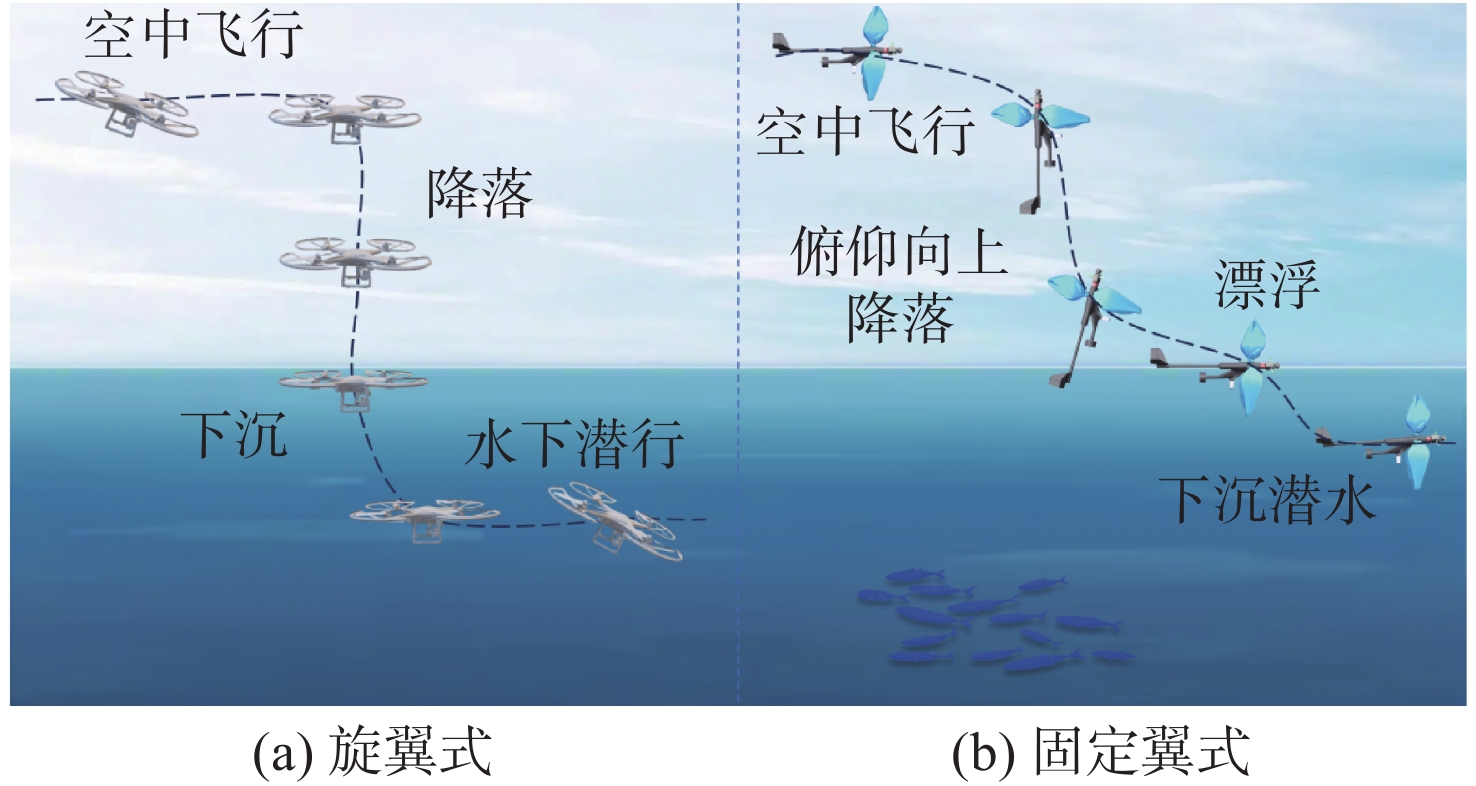
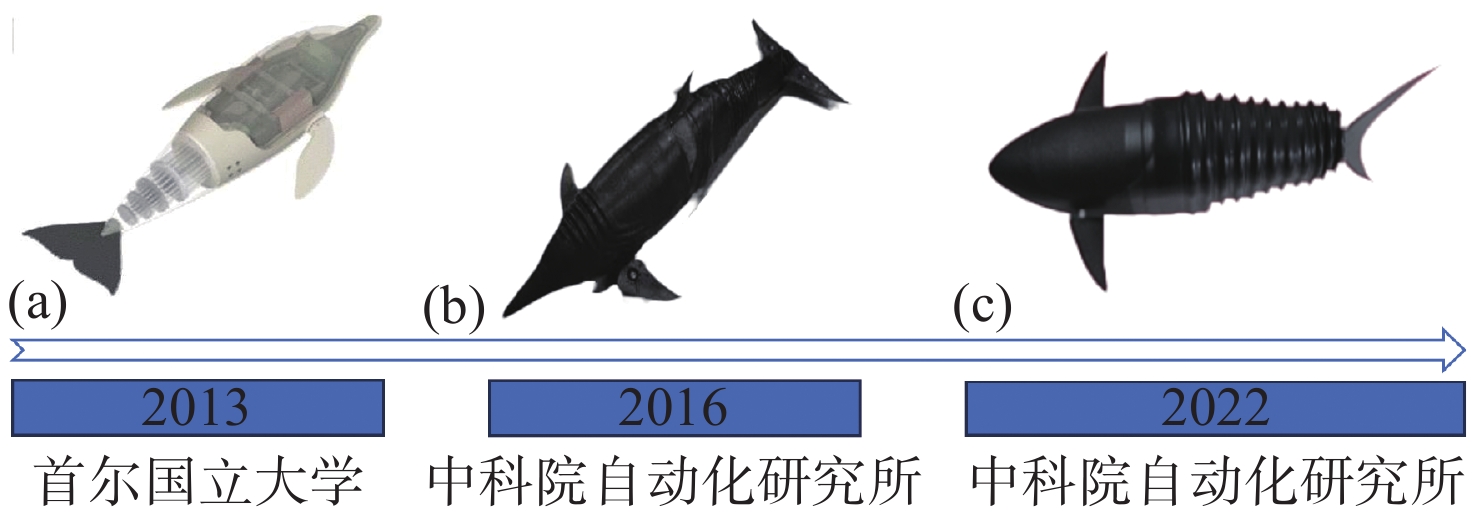
年份 研究机构 驱动方式 水空过渡策略 空水过渡策略 参考文献 2008 哈佛大学 弹簧机构 弹跳 — [19] 2011 麻省理工学院 弹弓机构 弹射 — [25] 2012 哈尔滨工业大学 弹簧机构 弹跳 — [20][21] 2012 麻省理工学院 空中螺旋桨 — 溅落 [27] 2013 北京航空航天大学 空中螺旋桨+水下螺旋桨 垂直起飞 [4][28] 2014 北京航空航天大学 空中螺旋桨+注水推进装置 滑行 滑落 [26] 2014 英国帝国理工学院 高压喷射 喷射 [80][81] 2014 米纳斯吉拉斯联邦大学 空中螺旋桨+水下螺旋桨 垂直起飞 垂直降落 [34][36] 2014 美国海军研究实验室 水下推进器 — 溅落/滑落 [57][58] 2015 哈佛大学 仿生拍打 — 溅落 [22] 2015 罗格斯大学 空中螺旋桨 垂直起飞 垂直降落 [35][82][83] 2015 奥克兰大学 [38][39][40] 2016 中国科学院自动化研究所 尾部推进 仿生拍打 溅落 [9][10] 2017 科罗拉多州立大学 仿生拍打 — [24] 2017 英国帝国理工学院 高压气体喷射+空中螺旋桨 喷射 溅落 [30] 2017 哈佛大学 仿生拍打+高压喷射 喷射 [23] 2017 舍布鲁克大学 空中螺旋桨 垂直起飞 [63] 2017 美国天主教大学 空中螺旋桨+水下螺旋桨 — [59] 2017 北卡罗来纳州立大学 空中螺旋桨 滑落 [60] 2018 上海交通大学 垂直降落 [67][68][69][70] 2018 约翰霍普金斯大学 — [64] 2018 北卡罗来纳州立大学 垂直降落 [61] 2018 皇家墨尔本大学 高压喷射 喷射 — [14][15][16] 2019 北京航空航天大学 滑落 [17][18] 2019 帝国理工学院 [65] 2019 新加坡国立大学 空中螺旋桨(可倾转) 垂直起飞 垂直降落 [47][48][49] 2019 加利福尼亚大学伯克利分校 空中螺旋桨 [42] 2019 国防科技大学 — 溅落 [31] 2021 苏黎世联邦理工学院 空中螺旋桨+水下螺旋桨 垂直起飞 [29] 2021 中国海洋大学 共轴反转螺旋桨+水下推进器 垂直降落 [54] 2021 吉林大学 高速入水推进机构 — 溅落 [32] 2022 中国科学院自动化研究所 尾部推进 仿生拍打 [11] 2022 上海交通大学 空中螺旋桨+水下螺旋桨 垂直起飞 垂直降落 [73] 2022 南京航空航天大学 滑行 [74] 2022 北京航空航天大学 空中螺旋桨 垂直起飞 [45] 2022 上海交通大学 滑落 [66] 2023 同济大学 空中螺旋桨(可倾转) 垂直降落 [55] 2023 广东工业大学 [56] 2023 哈尔滨工程大学 空中螺旋桨+水下螺旋桨 垂直起飞 滑落 [33]
下载: 导出CSV
-
[1] Longobardi F. Combination-vehicle: U. S. Patent 1286679[P]. 1918-12-3. [2] Fantastic P. Ushakov LPL flying submarine[EB/OL]. [2017-09-20]. http://www.airforce.ru/aircraft/miscellaneous/flying_submarine/index.html. [3] Zeng Z, Lyu C, Bi Y, et al. Review of hybrid aerial underwater vehicle: Cross-domain mobility and transitions control[J]. Ocean Engineering, 2022, 248: 110840. doi: 10.1016/j.oceaneng.2022.110840 [4] Yao G, Li Y, Zhang H, et al. Review of hybrid aquatic-aerial vehicle (HAAV): Classifications, current status, applications, challenges and technology perspectives[J]. Progress in Aerospace Sciences, 2023, 139: 100902. doi: 10.1016/j.paerosci.2023.100902 [5] Sun Y, Liu X, Cao K, et al. Design and theoretical research on aerial-aquatic vehicles: A review[J]. Journal of Bionic Engineering, 2023, 20(6): 2512-2541. doi: 10.1007/s42235-023-00418-x [6] 贺永圣. 仿生跨介质飞行器水气动布局融合设计及出水特性分析[D]. 长春: 吉林大学, 2021. [7] Chang B, Myeong J, Virot E, et al. Jumping dynamics of aquatic animals[J]. Journal of the Royal Society Interface, 2019, 16(152): 20190014. doi: 10.1098/rsif.2019.0014 [8] Park Y J, Park D, Cho K J. Design and manufacturing a robotic dolphin to increase dynamic performance[C]//2013 10th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI). Jeju, Korea(South): IEEE, 2013: 76-77. [9] Yu J, Su Z, Wu Z, et al. Development of a fast-swimming dolphin robot capable of leaping[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(5): 2307-2316. doi: 10.1109/TMECH.2016.2572720 [10] Yu J, Wu Z, Su Z, et al. Motion control strategies for a repetitive leaping robotic dolphin[J]. IEEE/ASME Transactions on Mechatronics, 2019, 24(3): 913-923. doi: 10.1109/TMECH.2019.2908082 [11] Chen D, Wu Z, Zhang P, et al. Performance improvement of a high-speed swimming robot for fish-like leaping[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 1936-1943. doi: 10.1109/LRA.2022.3142409 [12] Yang Z, Gong W, Chen H, et al. Research on the turning maneuverability of a bionic robotic dolphin[J]. IEEE Access, 2022, 10: 7368-7383. doi: 10.1109/ACCESS.2022.3142521 [13] Pham T H, Nguyen K, Park H C. A robotic fish capable of fast underwater swimming and water leaping with high Froude number[J]. Ocean Engineering, 2023, 268: 113512. doi: 10.1016/j.oceaneng.2022.113512 [14] Bacciaglia A, Guo D, Marzocca P, et al. Bimodal unmanned vehicle: Propulsion system integration and water/air interface testing[C]//Proceedings of the 31st Congress of the International Council of the Aeronautical Sciences (ICAS 2018). Belo Horizonte, Brasil: Deutsche Gesellschaft für Luft-und Raumfahrt, 2018: 1-10. [15] Guo D. Modelling and experimental investigations of a bi-modal unmanned underwater/air system[D]. Melbourne: Royal Melbourne Institute of Technology, 2019. [16] Guo D, Bacciaglia A, Simpson M, et al. Design and development a bimodal unmanned system[C]//AIAA Scitech 2019 Forum. San Diego, California: AIAA, 2019: 2096. [17] Hou T, Yang X, Su H, et al. Design and experiments of a squid-like aquatic-aerial vehicle with soft morphing fins and arms[C]//2019 International Conference on Robotics and Automation. Montreal, QC, Canada: IEEE, 2019: 4681-4687. [18] Hou T, Yang X, Su H, et al. Design, fabrication and morphing mechanism of soft fins and arms of a squid-like aquatic-aerial vehicle with morphology tradeoff[C]//2019 IEEE International Conference on Robotics and Biomimetics. Dali, China: IEEE, 2019: 1020-1026. [19] Shin B, Kim H Y, Cho K J. Towards a biologically inspired small-scale water jumping robot[C]//2008 2nd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics. Scottsdale, AZ, USA: IEEE, 2008: 127-131. [20] Zhao J, Zhang X, Chen N, et al. Why superhydrophobicity is crucial for a water-jumping microrobot? Experimental and theoretical investigations[J]. ACS applied materials & interfaces, 2012, 4(7): 3706-3711. [21] Yan J, Yang K, Wang T, et al. A continuous jumping robot on water mimicking water striders[C]//2016 IEEE International Conference on Robotics and Automation (ICRA). Stockholm, Sweden: IEEE, 2016: 4686-91. [22] Chen Y, Helbling E F, Gravish N, et al. Hybrid aerial and aquatic locomotion in an at-scale robotic insect[C]//2015 IEEE/RSJ International Conference on Intelligent Robots and Systems. Hamburg, Germany: IEEE, 2015: 331-338. [23] Chen Y, Wang H, Helbling E F, et al. A biologically inspired, flapping-wing, hybrid aerial-aquatic microrobot[J]. Science robotics, 2017, 2(11): eaao5619. doi: 10.1126/scirobotics.aao5619 [24] Jiang F, Zhao J, Kota A K, et al. A miniature water surface jumping robot[J]. IEEE Robotics and Automation Letters, 2017, 2(3): 1272-1279. doi: 10.1109/LRA.2017.2662738 [25] Gao A, Techet A H. Design considerations for a robotic flying fish[C]//OCEANS’11 MTS/IEEE KONA. Waikoloa, HI, USA: IEEE, 2011: 1-8. [26] Yao G, Liang J, Wang T, et al. Submersible unmanned flying boat: Design and experiment[C]//2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014). Bali, Indonesia: IEEE, 2014: 1308-1313. [27] Fabian A, Feng Y F, Swartz E, et al. Hybrid aerial underwater vehicle[R]. Lexington, USA: MIT Lincoln Lab, 2012. [28] Yang X, Wang T, Liang J, et al. Submersible unmanned aerial vehicle concept design study[C]//2013 Aviation Technology, Integration, and Operations Conference. Los Angeles, CA, USA: AIAA, 2013: 4422. [29] Rockenbauer F M, Jeger S, Beltran L, et al. Dipper: A dynamically transitioning aerial-aquatic unmanned vehicle[J]. Robotics: Science and Systems, 2021: 12-16. [30] Sun X, Cao J, Li Y, et al. Design and field test of a foldable wing unmanned aerial-underwater vehicle[J]. Journal of Field Robotics, 2024, 41(2): 347-373. doi: 10.1002/rob.22265 [31] 王宝财. 仿生折叠三旋翼跨介质无人机动力学建模与运动控制[D]. 长沙: 国防科技大学, 2019. [32] 吴正阳. 基于翠鸟入水策略的跨介质飞行器构型仿生设计及入水性能研究[D]. 长春: 吉林大学, 2021. [33] Siddall R, Ortega Ancel A, Kovač M. Wind and water tunnel testing of a morphing aquatic micro air vehicle[J]. Interface Focus, 2017, 7(1): 20160085. doi: 10.1098/rsfs.2016.0085 [34] Drews P L J, Neto A A, Campos M F M. Hybrid unmanned aerial underwater vehicle: Modeling and simulation[C]//2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Chicago, USA: IEEE, 2014: 4637-4642. [35] Maia M M, Soni P, Diez F J. Demonstration of an aerial and submersible vehicle capable of flight and underwater navigation with seamless air-water transition[EB/OL]. (2015-07-07)[2024-05-19]. https://arxiv.org/abs/1507.01932. [36] Horn A C, Pinheiro P M, Silva C B, et al. A study on configuration of propellers for multirotor-like hybrid aerial-aquatic vehicles[C]//2019 19th International Conference on Advanced Robotics. Belo Horizonte, Brazil: IEEE, 2019: 173-178. [37] Chen G, Liu A, Hu J, et al. Attitude and altitude control of unmanned aerial-underwater vehicle based on incremental nonlinear dynamic inversion[J]. IEEE Access, 2020, 8: 156129-38. doi: 10.1109/ACCESS.2020.3015857 [38] Alzu'bi H, Akinsanya O, Kaja N, et al. Evaluation of an aerial quadcopter power-plant for underwater operation[C]//2015 10th International Symposium on Mechatronics and its Applications. Sharjah, United Arab Emirates: IEEE, 2015: 1-4. [39] Alzu'bi H, Mansour I, Rawashdeh O. Loon copter: Implementation of a hybrid unmanned aquatic–aerial quadcopter with active buoyancy control[J]. Journal of field Robotics, 2018, 35(5): 764-778. doi: 10.1002/rob.21777 [40] Alzu'bi H. Loon copter: Modeling, implementation, and stability control of a fully-featured aquatic-aerial quadcopter[D]. Oakland: Oakland University, 2018. [41] Bershadsky D, Haviland S, Valdez P E, et al. Design considerations of submersible unmanned flying vehicle for communications and underwater sampling[C]//Oceans 2016 MTS/IEEE Monterey. Monterey, CA, USA: IEEE, 2016: 1-8. [42] Zha J, Thacher E, Kroeger J, et al. Towards breaching a still water surface with a miniature unmanned aerial underwater vehicle[C]//2019 International Conference on Unmanned Aircraft Systems. Atlanta, USA: IEEE, 2019: 1178-1185. [43] Puppala R, Sivadasan N, Vyas A, et al. Design, estimation of model parameters, and dynamical study of a hybrid aerial-underwater robot: Acutus[C]//ICINCO. [S. l.]: Scitepress, 2019: 423-430. [44] Vyas A, Puppala R, Sivadasan N, et al. Modelling and dynamic analysis of a novel hybrid aerial–underwater robot-acutus[C]//Oceans 2019-Marseille. Marseille, France: IEEE, 2019: 1-6. [45] Li L, Wang S, Zhang Y, et al. Aerial-aquatic robots capable of crossing the air-water boundary and hitchhiking on surfaces[J]. Science Robotics, 2022, 7(66): eabm6695. doi: 10.1126/scirobotics.abm6695 [46] Tan Y H, Siddall R, Kovac M. Efficient aerial–aquatic locomotion with a single propulsion system[J]. IEEE Robotics and Automation Letters, 2017, 2(3): 1304-1311. doi: 10.1109/LRA.2017.2665689 [47] Tan Y H, Chen B M. Design of a morphable multirotor aerial-aquatic vehicle[C]//Oceans 2019 MTS/IEEE Seattle. Seattle, WA, USA: IEEE, 2019: 1-8. [48] Tan Y H, Chen B M. Thruster allocation and mapping of aerial and aquatic modes for a morphable multimodal quadrotor[J]. IEEE/ASME Transactions on Mechatronics, 2020, 25(4): 2065-2074. doi: 10.1109/TMECH.2020.2998329 [49] Tan Y H, Chen B M. A morphable aerial-aquatic quadrotor with coupled symmetric thrust vectoring[C]//2020 IEEE International Conference on Robotics and Automation (ICRA). Paris, France: IEEE, 2020: 2223-2229. [50] Herng T Y. Design of a morphable aerial-underwater multirotor robot[D]. Singapore: National University of Singapore, 2021. [51] Tan Y H, Chen B M. Underwater stability of a morphable aerial-aquatic quadrotor with variable thruster angles[C]//2021 IEEE International Conference on Robotics and Automation. Xi'an, China: IEEE, 2021: 314-320. [52] Tan Y H, Chen B M. A lightweight waterproof casing for an aquatic UAV using rapid prototyping[C]//2020 International Conference on Unmanned Aircraft Systems (ICUAS). Athens, Greece: IEEE, 2020: 1154-1161. [53] Tan Y H, Chen B M. Motor-propeller matching of aerial propulsion systems for direct aerial-aquatic operation[C]//2019 IEEE/RSJ International Conference on Intelligent Robots and Systems. Macau, China: IEEE, 2019: 1963-1970. [54] Gao Y, Zhang H, Yang H, et al. Trans-domain amphibious unmanned platform based on coaxial counter-propellers: Design and experimental validation[J]. IEEE Access, 2021, 9: 149433-149446. doi: 10.1109/ACCESS.2021.3125138 [55] Liu X, Dou M, Huang D, et al. TJ-FlyingFish: Design and implementation of an aerial-aquatic quadrotor with tiltable propulsion units[C]//2023 IEEE International Conference on Robotics and Automation. London, UK: IEEE, 2023: 7324-7330. [56] Rao H, Xie L, Yang J, et al. Puffin platform: A morphable unmanned aerial/underwater vehicle with eight propellers[J]. IEEE Transactions on Industrial Electronics, 2023, 71(7): 7621-30. [57] Young T. Design and testing of an air-deployed unmanned underwater vehicle[C]//14th AIAA Aviation Technology, Integration, and Operations Conference. Atlanta, GA: AIAA, 2014: 2721. [58] Edwards D, Arnold N, Heinzen S, et al. Flying emp-lacement of an underwater glider[C]//Oceans 2017-Anchorage. Anchorage, AK, USA: IEEE, 2017: 1-6. [59] Caruccio D, Rush M, Smith P, et al. Design, fabrication, and testing of the fixed-wing air and underwater drone[C]//17th AIAA Aviation Technology, Integration, and Operations Conference. Denver, Colorado, USA: AIAA, 2017: 4447. [60] Weisler W, Stewart W, Anderson M B, et al. Testing and characterization of a fixed wing cross-domain unmanned vehicle operating in aerial and underwater environments[J]. IEEE Journal of Oceanic Engineering, 2017, 43(4): 969-982. [61] Stewart W, Weisler W, MacLeod M, et al. Design and demonstration of a seabird-inspired fixed-wing hybrid UAV-UUV system[J]. Bioinspiration & Biomimetics, 2018, 13(5): 056013. [62] Stewart W, Weisler W, Anderson M, et al. Dynamic modeling of passively draining structures for aerial-aquatic unmanned vehicles[J]. IEEE Journal of Oceanic Engineering, 2019, 45(3): 840-850. [63] Peloquin R A, Thibault D, Desbiens A L. Design of a passive vertical takeoff and landing aquatic UAV[J]. IEEE Robotics and Automation Letters, 2016, 2(2): 381-388. [64] Moore J, Fein A, Setzler W. Design and analysis of a fixed-wing unmanned aerial-aquatic vehicle[C]//2018 IEEE International Conference on Robotics and Automation. Brisbane, QLD, Australia: IEEE, 2018: 1236-1243. [65] Zufferey R, Ancel A O, Farinha A, et al. Consecutive aquatic jump-gliding with water-reactive fuel[J]. Science Robotics, 2019, 4(34): eaax7330. doi: 10.1126/scirobotics.aax7330 [66] Wei Z, Teng Y, Meng X, et al. Lifting-principle-based design and implementation of fixed-wing unmanned aerial-underwater vehicle[J]. Journal of Field Robotics, 2022, 39(6): 694-711. doi: 10.1002/rob.22071 [67] Lu D, Xiong C, Lyu B, et al. Multi-mode hybrid aerial underwater vehicle with extended endurance[C]//2018 Oceans-MTS/IEEE Kobe Techno-Oceans(OTO). Kobe, Japan: IEEE, 2018: 1-7. [68] Lu D, Xiong C, Zeng Z, et al. A multimodal aerial underwater vehicle with extended endurance and capabilities[C]//2019 International Conference on Robotics and Automation (ICRA). Montreal, QC, Canada: IEEE, 2019: 4674-80. [69] Lu D, Xiong C, Zhou H, et al. Design, fabrication, and characterization of a multimodal hybrid aerial underwater vehicle[J]. Ocean Engineering, 2021, 219: 108324. doi: 10.1016/j.oceaneng.2020.108324 [70] Lyu C, Lu D, Xiong C, et al. Toward a gliding hybrid aerial underwater vehicle: Design, fabrication, and experiments[J]. Journal of Field Robotics, 2022, 39(5): 543-556. doi: 10.1002/rob.22063 [71] Lu D, Guo Y, Xiong C, et al. Takeoff and landing control of a hybrid aerial underwater vehicle on disturbed water’s surface[J]. IEEE Journal of Oceanic Engineering, 2021, 47(2): 295-311. [72] Hu R, Lu D, Xiong C, et al. Modeling, characterization and control of a piston-driven buoyancy system for a hybrid aerial underwater vehicle[J]. Applied Ocean Research, 2022, 120: 102925. doi: 10.1016/j.apor.2021.102925 [73] Bi Y, Jin Y, Lyu C, et al. Nezha-Mini: Design and locomotion of a miniature low-cost hybrid aerial underwater vehicle[J]. IEEE Robotics and Automation Letters, 2022, 7(3): 6669-76. doi: 10.1109/LRA.2022.3176438 [74] 昂海松, 王源. 一种变轴螺旋桨水空跨域无人航行器设计和控制技术[J]. 无人系统技术, 2022, 5(3): 1-11.Ang Haisong, Wang Yuan. Design and control technology of a variable axis propeller unmanned vehicle cross region of water and air[J]. Unmanned Systems Technology, 2022, 5(3): 1-11. [75] Izraelevitz J S, Triantafyllou M S. Adding in-line motion and model-based optimization offers exceptional force control authority in flapping foils[J]. Journal of Fluid Mechanics, 2014, 742: 5-34. doi: 10.1017/jfm.2014.7 [76] Izraelevitz J S, Triantafyllou M S. A novel degree of freedom in flapping wings shows promise for a dual aerial/aquatic vehicle propulsor[C]//2015 IEEE International Conference on Robotics and Automation (ICRA). Seattle, WA, USA: IEEE, 2015: 5830-37. [77] Reid B D. The flying submarine: The story of the invention of the Reid Flying Submarine, RFS-1[M]. Maryland: Heritage Books, 2012. [78] Crouse G. Conceptual design of a submersible airplane[C]//48th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition. Orlando, Florida: AIAA, 2010: 1012. [79] Goddard R, Eastgate J. Submersible aircraft concept design study[M]. Washington: Naval Surface Warfare Center, Carderock Division, 2010. [80] Siddall R, Kovač M. Launching the AquaMAV: bioinspired design for aerial-aquatic robotic platforms[J]. Bioinspiration & Biomimetics, 2014, 9(3): 031001. [81] Siddall R, Kovac M. Fast aquatic escape with a jet thruster[J]. IEEE/ASME Transactions on Mechatronics, 2016, 22(1): 217-226. [82] Maia M M, Mercado D A, Diez F J. Design and implementation of multirotor aerial-underwater vehicles with experimental results[C]//2017 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vancouver, BC, Canada: IEEE, 2017: 961-966. [83] Mercado D, Maia M, Diez F J. Aerial-underwater systems, a new paradigm in unmanned vehicles[J]. Journal of Intelligent & Robotic Systems, 2019, 95: 229-238. [84] Wang T M, Yang X B, Liang J H, et al. CFD based investigation on the impact acceleration when a gannet impacts with water during plunge diving[J]. Bioinspiration & Biomimetics, 2013, 8(3): 036006. [85] Liang J, Yang X, Wang T, et al. Design and experiment of a bionic gannet for plunge-diving[J]. Journal of Bionic Engineering, 2013, 10(3): 282-291. doi: 10.1016/S1672-6529(13)60224-3 [86] Yang X, Liang J, Wang T, et al. Computational simulation of a submersible unmanned aerial vehicle impacting with water[C]//2013 IEEE International Conference on Robotics and Biomimetics. Shenzhen, China: IEEE, 2013: 1138-43. [87] Liang J H, Yao G C, Wang T M, et al. Wing load investigation of the plunge-diving locomotion of a gannet Morus inspired submersible aircraft[J]. Science China Technological Sciences, 2014, 57: 390-402. doi: 10.1007/s11431-013-5437-5 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 2471
- HTML全文浏览量: 342
- PDF下载量: 361
- 被引次数: 0
图(14) / 表(2)




