

Underwater Target Search and Tracking Based on Air-Sea Heterogeneous Unmanned Platform
-
摘要: 海上异构无人系统可有效提高复杂任务的完成效率。文中采用自主水下航行器(AUV)和无人机(UAV)来完成近海海域内未知水下目标的搜索与跟踪任务。首先, 描述了水下目标搜索跟踪任务, 将任务过程分为目标搜索和目标跟踪阶段, 2个阶段的目标分别是使AUV&UAV总搜索空间最大化以及AUV与水下目标的末端位置误差最小; 然后, 建立AUV&UAV跨域协同搜索模型, 并设定模型中AUV和UAV探测范围和通信距离等约束条件; 最后, 在跨域协同搜索与路径跟踪规划中, 基于传统粒子群算法, 加入自适应学习因子调控策略和精英保存策略, 生成搜索与跟踪路径。仿真实验表明, 采用改进粒子群优化算法的AUV&UAV异构无人系统能够更高效地完成水下目标搜索与跟踪任务。Abstract: The marine heterogeneous unmanned systems can effectively enhance the implementation efficiency of complex missions. In this paper, autonomous undersea vehicles(AUVs) and unmanned aerial vehicles(UAVs) were used for searching and tracking unknown underwater targets in offshore waters. First, the underwater target search and tracking mission was described, and the mission was divided into two stages: target search and target tracking, with the objectives of maximizing the total search space of the AUV&UAV system and minimizing the end position error between the AUV and the underwater target, respectively. Then, a cross-domain collaborative search model of the AUV&UAV system was established, and constraints such as detection range and communication distance for AUVs and UAVs in the model were set. Finally, based on the traditional particle swarm optimization algorithm, an adaptive learning factor regulation strategy and an elite preservation strategy were employed for cross-domain collaborative search and tracking path planning, and search and tracking paths were generated. The simulation experiment demonstrates that the heterogeneous AUV&UAV system based on an improved particle swarm optimization algorithm can more efficiently search and track underwater targets.
-

图 4 基于PSO算法的任务全过程二维路径曲线
Figure 4. The two-dimensional path map of the whole process of a task based on PSO algorithm

图 5 基于PSO算法的任务全过程三维路径图
Figure 5. 3D path map of the whole process of the task based on PSO algorithm

图 6 基于PSO算法的全过程无人平台间距变化曲线
Figure 6. The whole process of unmanned platform spacing variation curve based on PSO algorithm

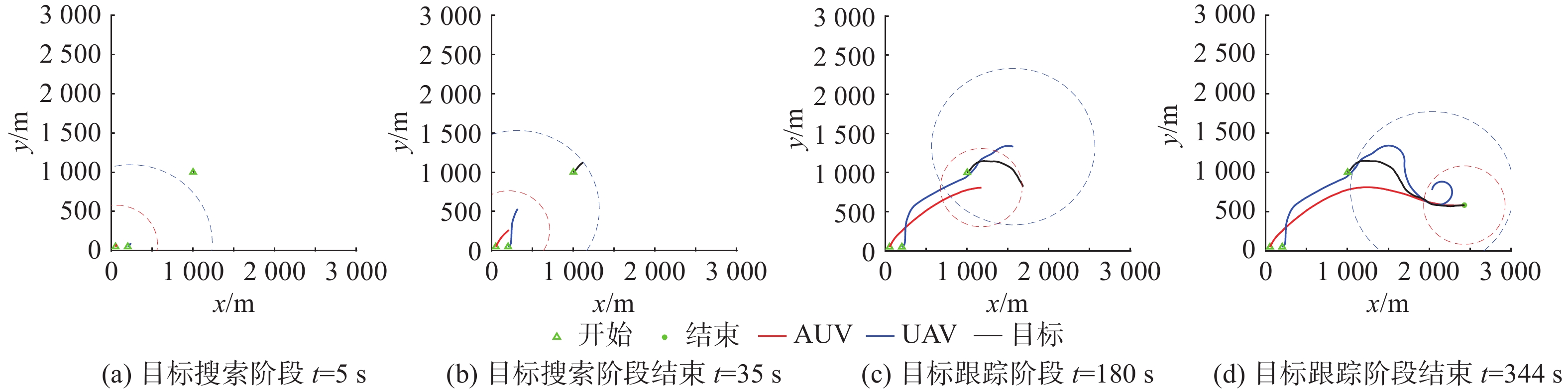
图 7 基于IPSO算法的任务全过程的二维路径图
Figure 7. The two-dimensional path map of the whole process of a task based on IPSO algorithm

图 8 基于IPSO算法的任务全过程三维路径图
Figure 8. 3D path map of the whole process of the task based on IPSO algorithm

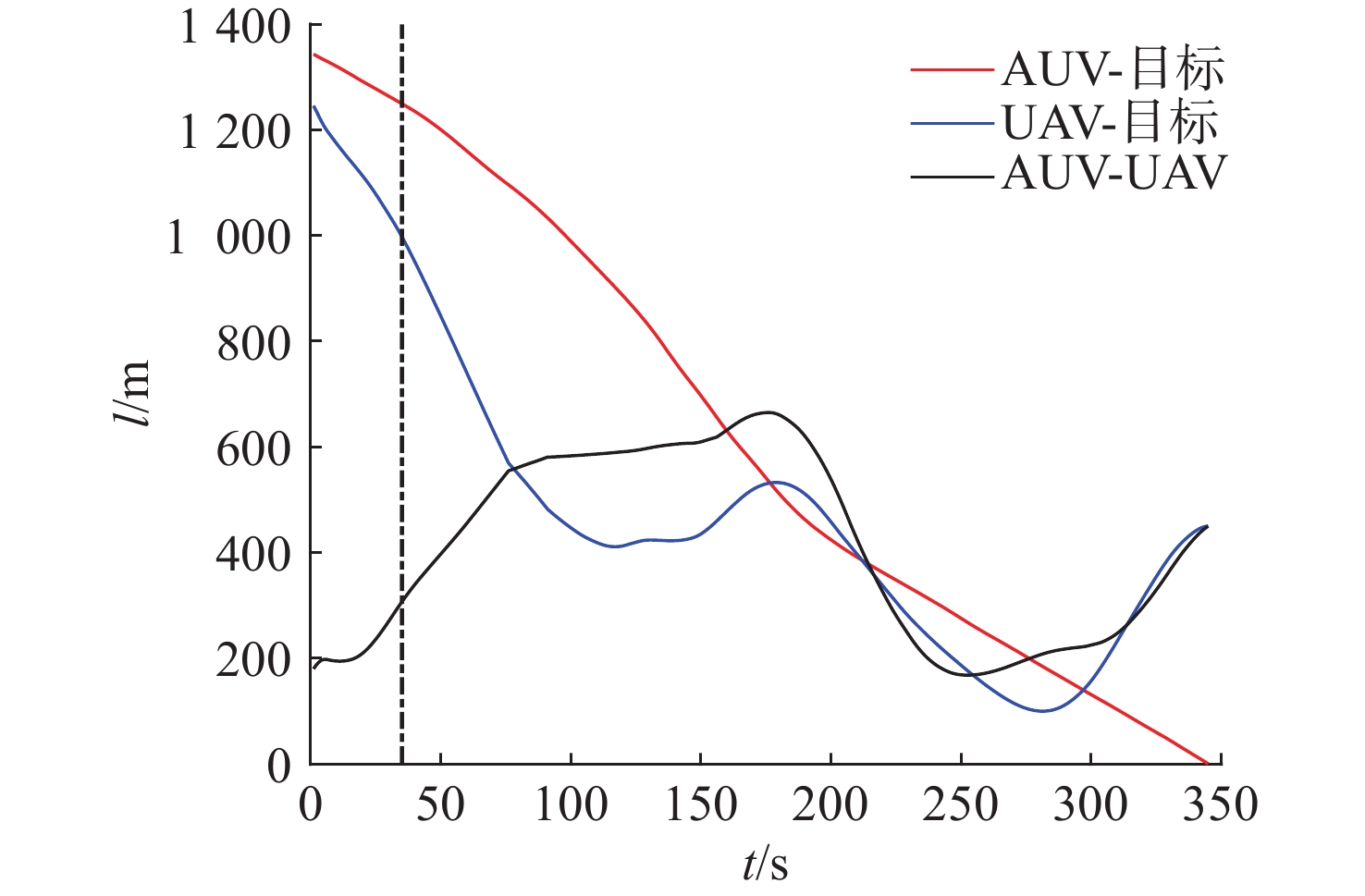
图 9 基于IPSO算法的全过程无人平台间距变化曲线
Figure 9. The whole process of unmanned platform spacing variation curves based on IPSO algorithm
表 1 UAV、AUV及二维定深运动目标的初始状态信息
Table 1. Initial state information of UAV, AUV and two-dimensional depth-fixed moving target
运动物体 坐标/m 速度
/(m/s)姿态角/rad x y z $\varphi $ $\theta $ UAV 200 0 50 15 π/6 − AUV 0 50 −50 8 0 0 目标 1 000 1 000 −50 5 0 0  下载: 导出CSV
下载: 导出CSV
表 2 基于PSO算法任务的相关参数
Table 2. Other data of task based on PSO algorithm
参数 数值 TU/s 41.00 TA/s 241.00 TA-T/s 400.00 LA-T/m 1.86
下载: 导出CSV
表 3 基于IPSO算法任务的相关参数
Table 3. Other data of UAV & AUV heterogeneous system task based on IPSO algorithm
参数 数值 TU/s 35.00 TA/s 180.00 TA-T/s 344.00 LA-T/m 0.69
下载: 导出CSV
表 4 PSO算法和IPSO算法仿真结果
Table 4. Some experimental results of PSO algorithm
参数 PSO仿真结果 平均值 TU/s 41 40 37 54 32 40.8 TA/s 241 227 244 261 217 238 TA-T/s 400 366 384 416 341 381.4 LA-T/m 1.86 2.68 2.23 1.56 1.72 2.01 参数 IPSO仿真结果 平均值 TU/s 35 30 25 30 42 34.4 TA/s 180 217 203 175 210 197 TA-T/s 344 347 253 230 361 307 LA-T/m 1.69 1.83 0.83 1.53 1.62 1.5
下载: 导出CSV
-
[1] 郝紫霄, 王琦. 基于声呐图像的水下目标检测研究综述[J]. 水下无人系统学报, 2023, 31(2): 339-348.Hao Zixiao, Wang Qi. Underwater target detection based on sonar image[J]. Journal of Unmanned Undersea Systems, 2023, 31(2): 339-348. [2] 熊伟, 朱洪峰, 崔亚奇. 在线学习的循环自适应机动目标跟踪算法[J]. 航空学报, 2022, 43(5): 444-456.Xiong Wei, Zhu Hongfeng, Cui Yaqi, et al. Recurrent adaptive maneuvering target tracking algorithm based on online learning[J]. Acta Aeronautica ET Astronautica Sinica, 2022, 43(5): 444-456. [3] 张鑫明, 韩明磊, 余益锐, 等. 潜艇与UUV协同作战发展现状及关键技术[J]. 水下无人系统学报, 2021, 29(5): 497-508.Zhang Xinming, Han Minglei, Yu Yirui, et al. Development and key technologies of submarine-UUV cooperative operation[J]. Journal of Unmanned Undersea Systems, 2021, 29(5): 497-508. [4] 王晓慧, 黄刚, 丁洁, 等. 基于改进型ADRC算法的无人水面侦察艇轨迹跟踪[J]. 水下无人系统学报, 2021, 29(3): 286-292.Wang Xiaohui, Huang Gang, Ding Jie, et al. Trajectory tracking of unmanned surface reconnaissance vessel based on improved ADRC algorithm[J]. Journal of Unmanned Undersea Systems, 2021, 29(3): 286-292. [5] 郭银景, 鲍建康, 刘琦, 等. AUV实时避障算法研究进展[J]. 水下无人系统学报, 2020, 28(4): 351-358, 369. doi: 10.11993/j.issn.2096-3920.2020.04.001Guo Yinjing, Bao Jiankang, Liu Qi, et al. Research progress of real-time obstacle avoidance algorithms for unmanned undersea vehicle: A review[J]. Journal of Unmanned Undersea Systems, 2020, 28(4): 351-358, 369. doi: 10.11993/j.issn.2096-3920.2020.04.001 [6] 杨勇, 丁勇, 黄鑫城. 改进APF与Bezier相结合的多无人机协同避碰航路规划[J]. 电光与控制, 2018, 25(11): 36-41, 47. doi: 10.3969/j.issn.1671-637X.2018.11.007Yang Yong, Ding Yong, Huang Xincheng. Multi-UAV cooperative collision avoidance route planning based on improved artificial potential field and bezier curve[J]. Electronics Optics & Control, 2018, 25(11): 36-41, 47. doi: 10.3969/j.issn.1671-637X.2018.11.007 [7] Zu W, Fan G, Gao Y, et al. Multi-UAVs cooperative path planning method based on improved RRT algorithm[C]//2018 IEEE International Conference on Mechatronics and Auto-mation(ICMA). Changchun, Jilin, China: IEEE, 2018: 1563-1567. [8] 包昕幼. 浅水区域无人探测艇编队巡航路径规划研究[D]. 广州: 华南理工大学, 2018. [9] Liu Y, Song R, Bucknall R, et al. Intelligent multi-task allocation and planning for multiple unmanned surface vehicles(USVs) using self-organising maps and fast marching method[J]. Information Sciences: An International Journal, 2019, 496: 180-197. doi: 10.1016/j.ins.2019.05.029 [10] Han G J, Long X H, Zhu C, et al. A high-availability data collection scheme based on multi-AUVs for underwater sensor networks[J]. IEEE Transactions on Mobile Computing, 2019, 19(5): 1010-1022. [11] 马朋, 张福斌, 徐德民. 基于距离量测的双领航多AUV协同定位队形优化分析[J]. 控制与决策, 2018, 33(2): 256-262.Ma Peng, Zhang Fubin, Xu Demin. Optimality analysis for formation of MAUV cooperative localization with two leaders based on range measurements[J]. Control and Decision, 2018, 33(2): 256-262. [12] Ridao P, Carreras M, Ribas D, et al. Intervention AUVs: The next challenge[J]. Annual Reviews in Control, 2015, 40: 227-241. doi: 10.1016/j.arcontrol.2015.09.015 [13] Ni J J, Liu Y, Wu L Y, et al. An improved spinal neural system-based approach for heterogeneous AUVs cooperative hunting[J]. International Journal of Fuzzy Systems, 2018, 20(2): 672-686. doi: 10.1007/s40815-017-0395-x [14] 王宁, 梁晓龙, 张佳强, 等. 跨域无人集群协同反潜搜索方法研究[J/OL]. 系统仿真学报: 1-10[2024-04-01]. https://doi.org/10.16182/j.issn1004731x.joss.23-0073. [15] Bella S, Belbachir A, Belalem G. A centralized autonomous system of cooperation for UAVs-monitoring and USVs-cleaning[M]//Unmanned Aerial Vehicles. Hershey: IGI Global, 2019: 347-375. [16] Yu W, Kin H L, Chen L. Cooperative path planning for heterogeneous unmanned vehicles in a search-and-track mission aiming at an underwater target[J]. IEEE Transactions on Vehicular Technology, 2020, 69(6): 6782-6787. doi: 10.1109/TVT.2020.2991983 [17] Yu W. Coordinated path planning for an unmanned aerial-aquatic vehicle(UAAV) and an autonomous underwater vehicle(AUV) in an underwater target strike mission[J]. Ocean Engineering, 2019, 182: 162-173. doi: 10.1016/j.oceaneng.2019.04.062 [18] 杨海清, 芦斌. 基于改进蚁群算法的水下无人机路径规划研究[J]. 计算机测量与控制, 2020, 28(10): 216-220.Yang Haiqing, Lu Bin. Research on path planning of underwater UAV based on improved ant colony algorithm[J]. Computer Measurement & Control, 2020, 28(10): 216-220. [19] Shen C, Shi Y, Buckham B. Integrated path planning and tracking control of an AUV: A unified receding horizon optimization approach[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(99): 1163-1173. [20] Kennedy J, Eberhart R. Particle swarm optimization[C]//1995 IEEE International Conference on Neural Networks Proceedings. Perth, Western Australia: IEEE, 1995. [21] Shi Y, Eberhart R. A modified particle swarm optimizer[C]//1998 IEEE International Conference on Evolutionary Computation Proceedings. Anchorage, AK, USA: IEEE, 1998. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 1631
- HTML全文浏览量: 265
- PDF下载量: 235
- 被引次数: 0





