

Development Overview and Inspiration of Collaborative Application of Heterogeneous Unmanned Clusters at Sea
-
摘要: 无人系统集群凭借其协调度高、完全自主、群体智能等显著特点, 可直接影响并改变海上作战样式, 世界各海洋强国竞相开展跨域异构无人装备协同运用研究。文中重点分析了当前世界海上异构无人集群协同运用发展现状及典型作战运用案例, 分析了其具备的跨域多异构节点自组网通信、多域多源信息融合态势感知和多域大规模异构集群编队控制等特点, 最后提出,海上异构无人集群应融合有人无人感知信息、精细化智能决策、强化行动控制模拟训练、构建去中心化集群体系等启示建议。Abstract: Unmanned system clusters, with their significant characteristics such as high coordination, complete autonomy, and collective intelligence, can directly affect and change the style of maritime operations. Multiple maritime powers around the world are competing to conduct research on the collaborative application of cross-domain heterogeneous unmanned equipment. The current development status of maritime heterogeneous unmanned clusters in the world and typical operational cases were analyzed, and it was found that maritime heterogeneous unmanned clusters had the characteristics of self-organized network communication of cross-domain multi-heterogeneous nodes, multi-domain and multi-source information fusion situation awareness, and multi-domain and large-scale heterogeneous cluster formation control. Finally, it was proposed that maritime heterogeneous unmanned clusters should fuse manned and unmanned sensory information, refined intelligent decision-making, enhanced operation control simulation training, and construction of decentralized cluster systems.
-
Key words:
- cross domain heterogeneity /
- unmanned cluster /
- collaborative application
-
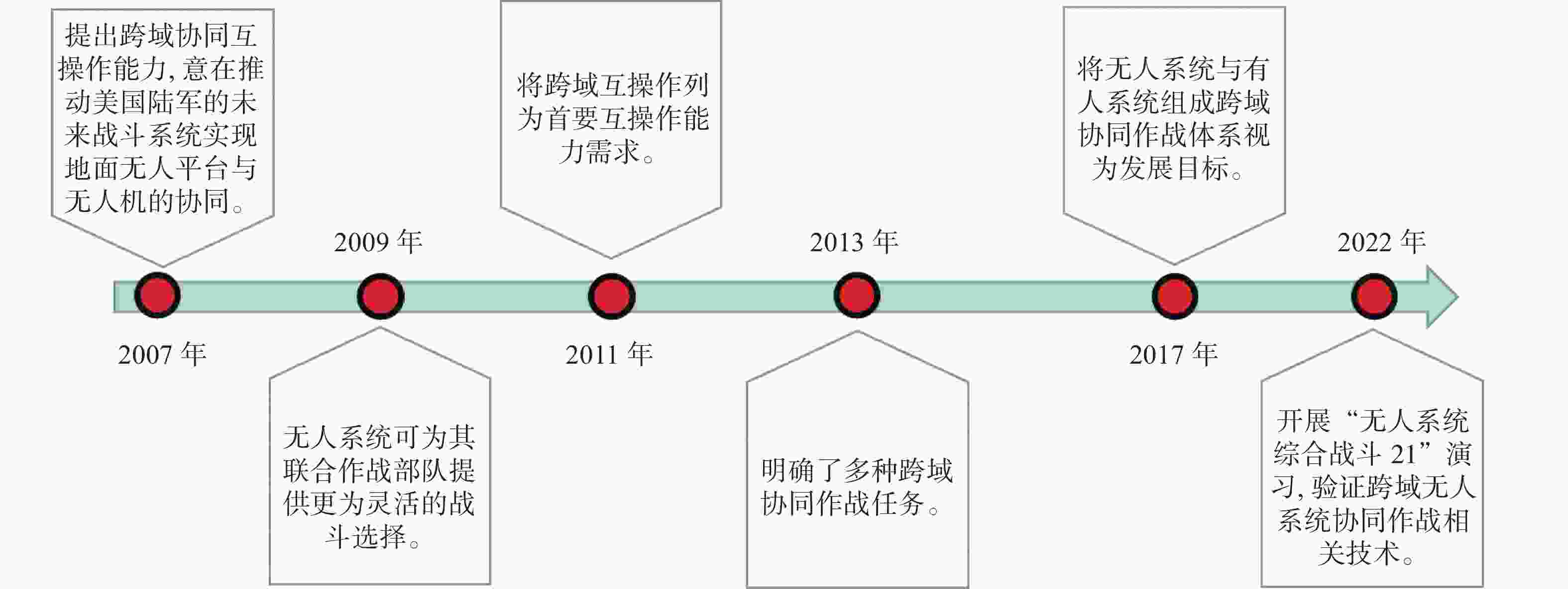
图 1 美军无人系统跨域协同发展历程
Figure 1. The development process of unmanned systems cross-domain collaboration in the US army

图 2 USV与UUV之间声呐图像传输概念图
Figure 2. Conceptual diagram of sonar image transmission between USV and UUV
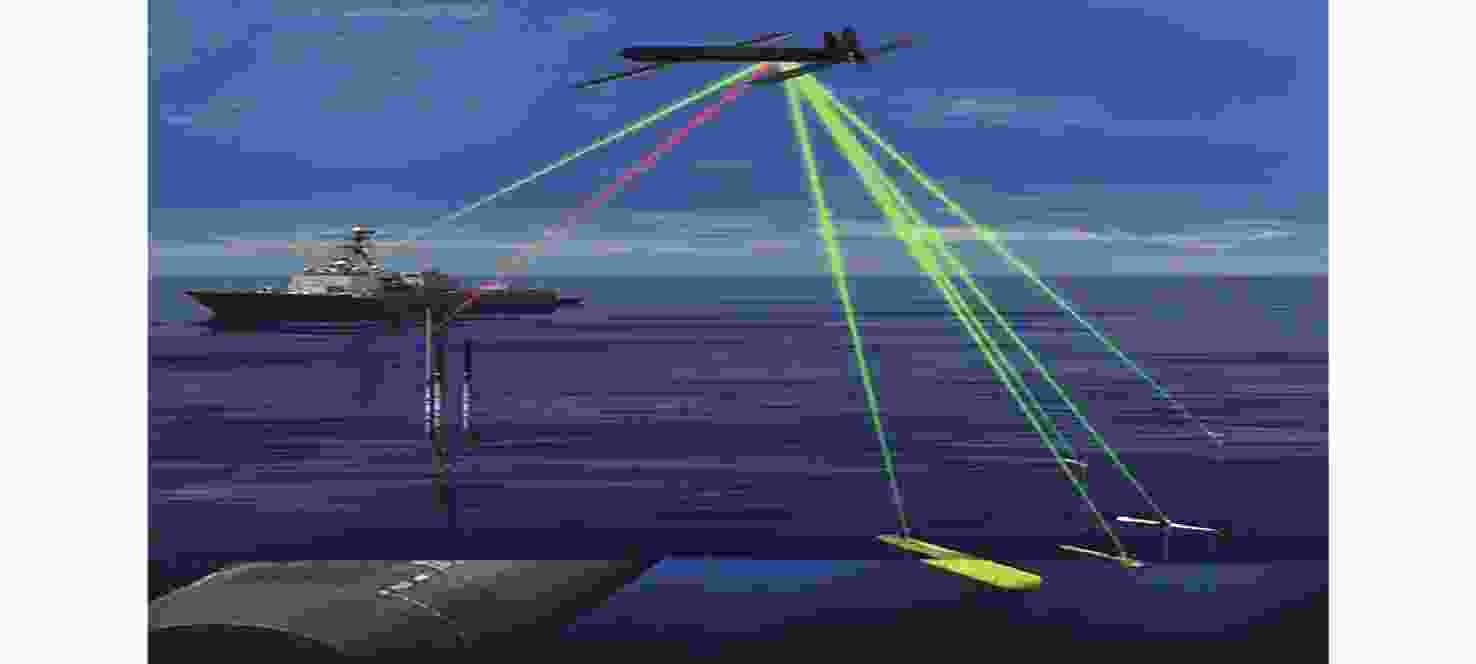
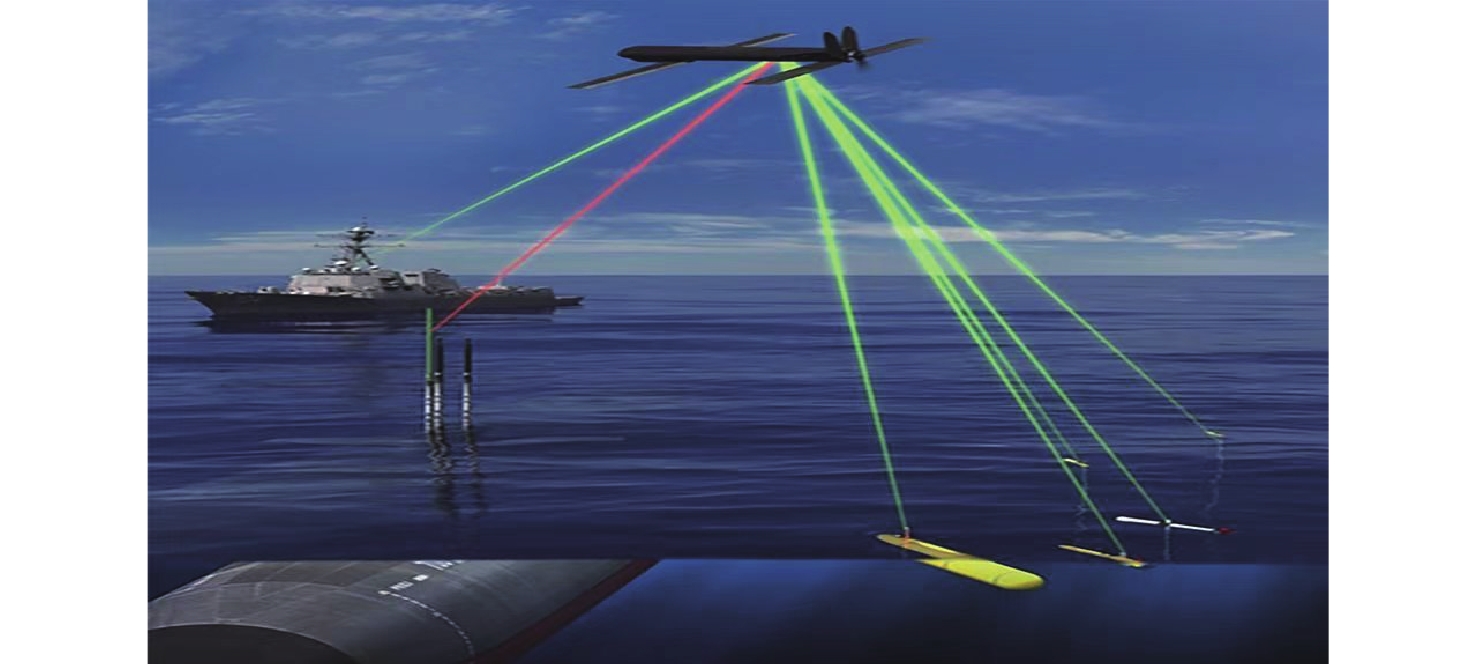
图 3 美军无人系统跨域协同反潜
Figure 3. Cross-domain collaborative antisubmarine operations of unmanned systems in the U.S. army
表 1 国外跨域异构集群试验
Table 1. Cluster trial of foreign cross-domain heterogeneous
国别 年份 验证内容 平台类型及数量 美国 2016 UAV由核潜艇投放, 作为核潜艇、UUV与有人水面舰间的通信中继 “黑翼”UAV核潜艇、UUV、有人水面舰各1架(艘) 美国 2016 开展全新的跨域异构无人系统协同作战控制架构验证 1艘UUV、2艘“波浪滑翔者”USV、1架有人直升机 英国 2016 开展自主控制、发展和认知统一, 实现单一系统对多个UAV、USV和UUV的指挥控制 25种无人系统(UAV、USV和UUV) 美国 2017 UUV与USV的跨域协同通信 USV和UUV各1艘 法国 2017 利用Drones任务系统实现了3种无人系统的协同探测、识别、拦截敌方小型舰艇 IT180小型旋翼UAV、REMORINA USV和UUV 美国 2017 开发了自主控制、发展和认知系统, 实现了单一系统对多个UAV、USV和UUV的指挥控制 “普罗特斯”大型UUV、REMUS 100、IVER UUV各1艘, “激流”UUV、“波浪滑翔者”USV各2艘, 以及1架UAV 美国 2018 验证未来可能应用的“人机交互”作战模式, 重点验证了多无人平台跨域协同执行反水雷任务 15种无人系统(UAV、USV和UUV) 美国 2018 利用跨域无人系统进行反水雷作战 2艘UUV、1艘USV、1架UAV 美国 2019 USV、UUV、有人水面舰和核潜艇实现跨域协同通信和信息传输 “金枪鱼-19”UUV, USV, 有人水面舰和核潜艇4类各1艘 美国 2019 协同探测和识别水雷目标, 并用UUV清理 “梭鱼”UUV、USV各1艘 美国 2022 指挥控制UAV、USV以及UUV, 完成海上预警探测、目标指示与引导攻击、跨域有人无人协同行动等行动任务 “海上猎手”USV、“海鹰” USV、MQ-8B UAV、MQ-9 UAV、3吨级UUV、“伯克”级驱逐舰 美国 2023 评估无人系统在水面、水下和空中跨域异构网络通信、协同态势感知等作战能力 “海上猎手”USV、“海鹰” USV、MQ-9B UAV、RQ-20 UAV、3吨级UUV  下载: 导出CSV
下载: 导出CSV
表 2 跨域无人集群类型划分表
Table 2. Type classification of cross-domain unmanned cluster
类型 自主能力 指挥模式 协作关系 通信方式 Ⅰ 无自主 无 时空协同 群间无通信 Ⅱ 半自主 人在回路上 编队协同 地面站/卫星/群间通信 Ⅲ 全自主 人在回路外 任务协同 去中心化链路通信
下载: 导出CSV
-
[1] 王殿勋, 郭萃, 谢君, 等. 无人机集群对海上舰船的作战样式研究[J]. 兵器装备工程学报, 2022, 43(10): 1-9.Wang Dianxun, Guo Cui, Xie Jun, et al. Research on combat style of air UAV cluster against maritime ships[J]. Journal of Ordnance Equipment Engineering, 2022, 43(10): 1-9. [2] 张卫东, 刘笑成, 韩鹏. 水上无人系统研究进展及其面临的挑战[J]. 自动化学报, 2020, 46(5): 847-857.Zhang Weidong, Liu Xiaocheng, Han Peng. Research progress and challenges of underwater unmanned system[J]. Acta Automatica Sinica, 2020, 46(5): 847-857. [3] 徐博, 王朝阳. 基于无人艇跨域异构编队协同导航研究进展与未来趋势[J]. 中国舰船研究, 2022, 17(4): 1-11, 56.Xu Bo, Wang Chaoyang. Research progress and future trend of cross-domain heterogeneous formation cooperative navigation based on unmanned boats[J]. China Ship Research, 2022, 17(4): 1-11, 56. [4] 陈燚. 水面无人艇基于优化的协同策略及实现的初步研究[D]. 镇江: 江苏科技大学, 2016. [5] 徐玉如, 苏玉民, 庞永杰. 海洋空间智能无人运载器技术发展展望[J]. 中国舰船研究, 2006, 1(3): 1-4.Xu Yuru, Su Yumin, Pang Yongjie. Development prospect of marine space intelligent unmanned vehicle technology[J]. China Ship Research, 2006, 1(3): 1-4. [6] 岳丽军, 王凡, 赵朝先. 海战场无人作战体系协同运用与指挥控制设想[J]. 指挥控制与仿真, 2022, 44(4): 1-7.Yue Lijun, Wang Fan, Zhao Chaoxian. Collaborative application and command and control of unmanned combat system in sea battlefield[J]. Command and control and simulation, 2022, 44(4): 1-7. [7] 金克帆, 王鸿东, 易宏, 等. 海上无人装备关键技术与智能演进展望[J]. 中国舰船研究, 2018, 13(6): 1-8.Jin Kefan, Wang Hongdong, Yi Hong, et al. Key technologies and intelligent evolution prospect of unmanned marine equipment[J]. China Ship Research, 2018, 13(6): 1-8. [8] 韩光松, 侯博, 李萍. 无人自主系统在海战场的运用[J]. 飞航导弹, 2020(11): 84-89.Han Guangsong, Hou Bo, Li Ping. Application of unmanned autonomous system in sea battlefield[J]. Aeronautical Missile, 2020(11): 84-89. [9] Jiang Y, Peng Z H, Wang D, et al. Line-of-sight target enclosing of an underactuated autonomous surface vehicle with experiment results[J]. IEEE Transactions on Industrial Informatics, 2020, 16(2): 832-841. doi: 10.1109/TII.2019.2923664 [10] Liu L, Wang D, Peng Z H, et al. Cooperative path following ring-networked under-actuated autonomous surface vehicles: Algorithms and experimental results[J]. IEEE Transactions on Cybernetics, 2020, 50(4): 1519-1529. doi: 10.1109/TCYB.2018.2883335 [11] Gu N, Peng Z H, Wang D, et al. Antidisturbance coordinated path following control of robotic autonomous surface vehicles: Theory and experiment[J]. IEEE/ASME Transactions on Mechatronics, 2019, 24(5): 2386-2396. [12] Dempsey M E. Joint operational access concept[R]. United States of America: Department of Defense, 2020: 1-76 [13] 张维明, 黄松平, 黄金才, 等. 多域作战及其指挥控制问题探析[J]. 指挥信息系统与技术, 2020, 11(1): 1-6.Zhang Weiming, Huang Songping, Huang Jincai, et al. Multi-domain operations and their command and control[J]. Command Information System and Technology, 2020, 11(1): 1-6. [14] Liu Z X, Zhang Y M, Yu X, et al. Unmanned surface vehicles: An overview of developments and challenges[J]. Annual Reviews In Control, 2016, 41: 71-93. doi: 10.1016/j.arcontrol.2016.04.018 [15] Breivik M, Hovstein V E, Fossen T I. Straight-line target tracking for unmanned surface vehicles[J]. Modeling, Identification and Control, 2008, 29(4): 131-149. doi: 10.4173/mic.2008.4.2 [16] Dai S L, Wang C, Luo F. Identification and learning control of ocean surface ship using neural net-works[J]. IEEE Transactions on Industrial Informatics, 2012, 8(4): 801-810. doi: 10.1109/TII.2012.2205584 [17] Sonnenburg C R, Woolsey C A. Modeling, identification, and control of an unmanned surface vehicle[J]. Journal of Field Robotics, 2013, 30(3): 371-398. doi: 10.1002/rob.21452 [18] Peng Z H, Wang J, Wang D. Distributed maneuvering of autonomous surface vehicles based on neurodynamic optimization and fuzzy approximation[J]. IEEE Transactions on Control Systems Technology, 2018, 26(3): 1083-1090. doi: 10.1109/TCST.2017.2699167 [19] Peng Z H, Jiang Y, Wang J. Event-triggered dynamic surface control of an underactuated autonomous surface vehicle for target enclosing[J]. IEEE Trans-actions on Industrial Electronics, 2020, 68(4): 3402-3412. [20] Eliker K, Zhang G Q, Grouni S, et al. An optimization problem for quadcopter reference flight trajectory generation[J]. Journal of Advanced Transportation, 2018, 4: 6574183.1-6574183.15. [21] Cheng Z X, Li D S, Gao Y. UAV three-dimensional path planning based on the grasshopper algorithm[J]. Flight Dynamics, 2019, 37(2): 46-50, 55. [22] Wang S Y, Long T, Wang Z, et al. Dynamic path planning using anytime repairing sparse A* algorithm[J]. Systems Engineering and Electronics, 2018, 40(12): 2714-2721. [23] Aggarwal S, Kumar N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges[J]. Computer Communications, 2020, 149: 270-299. doi: 10.1016/j.comcom.2019.10.014 [24] Liu Y Y, Rajappa S, Montenbruck J M, et al. Robust nonlinear control approach to nontrivial maneuvers and obstacle avoidance for quadrotor UAV under disturbances[J]. Robotics and Autonomous Systems, 2017, 98: 317-332. doi: 10.1016/j.robot.2017.08.011 [25] Sasongko R A, Rawikara S S, Tampubolon H J. UAV obstacle avoidance algorithm based on ellipsoid geometry[J]. Journal of Intelligent & Robotic Systems, 2017, 88(2-4): 567-581. [26] Krämer M S, Kuhnert K D. Multi-Sensor fusion for UAV collision avoidance[C]//Proceedings of the 2018 International Conference on Mechatronics Systems and Control Engineering. Amsterdam, Netherlands: ACM, 2018. 5-12. [27] Jakeman M. Task force report on next-generation unmanned undersea systems[R]. United States of America: DOD Defense Science Board, 2016: 1-97. [28] 王石, 张建强, 杨舒卉, 等. 国内外无人艇发展现状及典型作战应用研究[J]. 火力与指挥控制, 2019, 44(2): 11-15.Wang Shi, Zhang Jianqiang, Yang Shuhui, et al. Research on the development status and typical operational application of unmanned boats at home and abroad[J]. Firepower and Command and Control, 2019, 44(2): 11-15. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 2434
- HTML全文浏览量: 543
- PDF下载量: 393
- 被引次数: 0





