Characteristics of Underwater Trajectory of Trans-Medium Vehicles
-
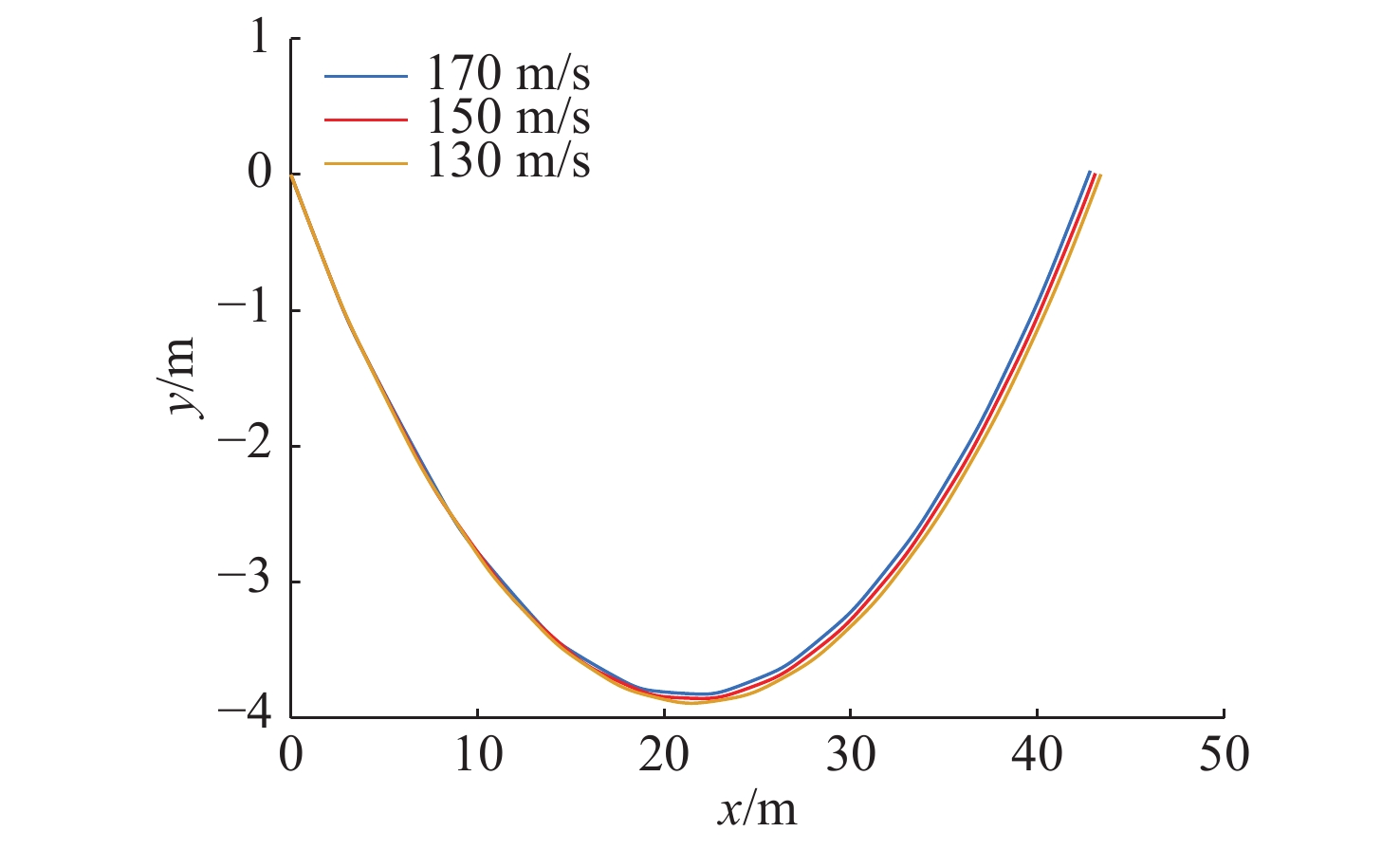
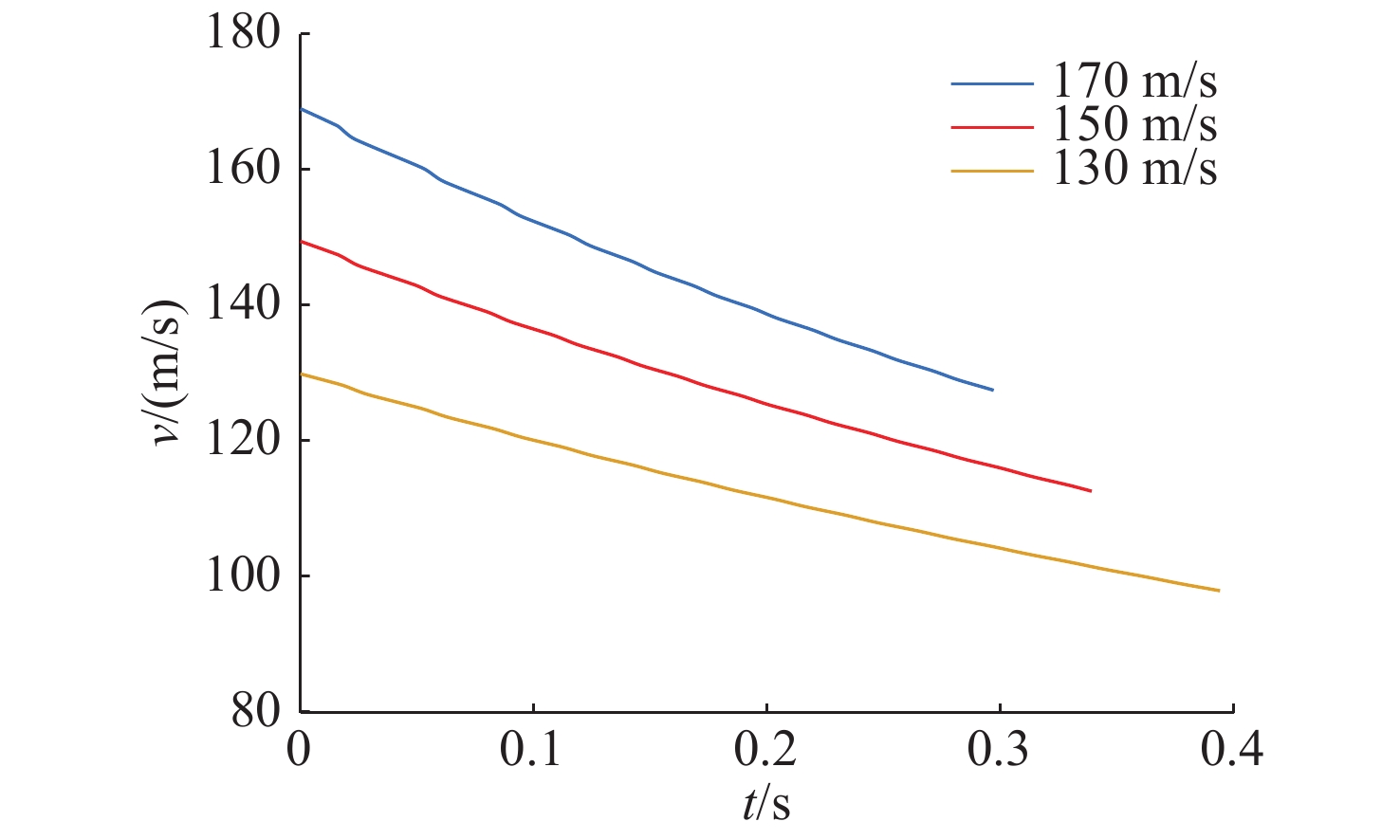
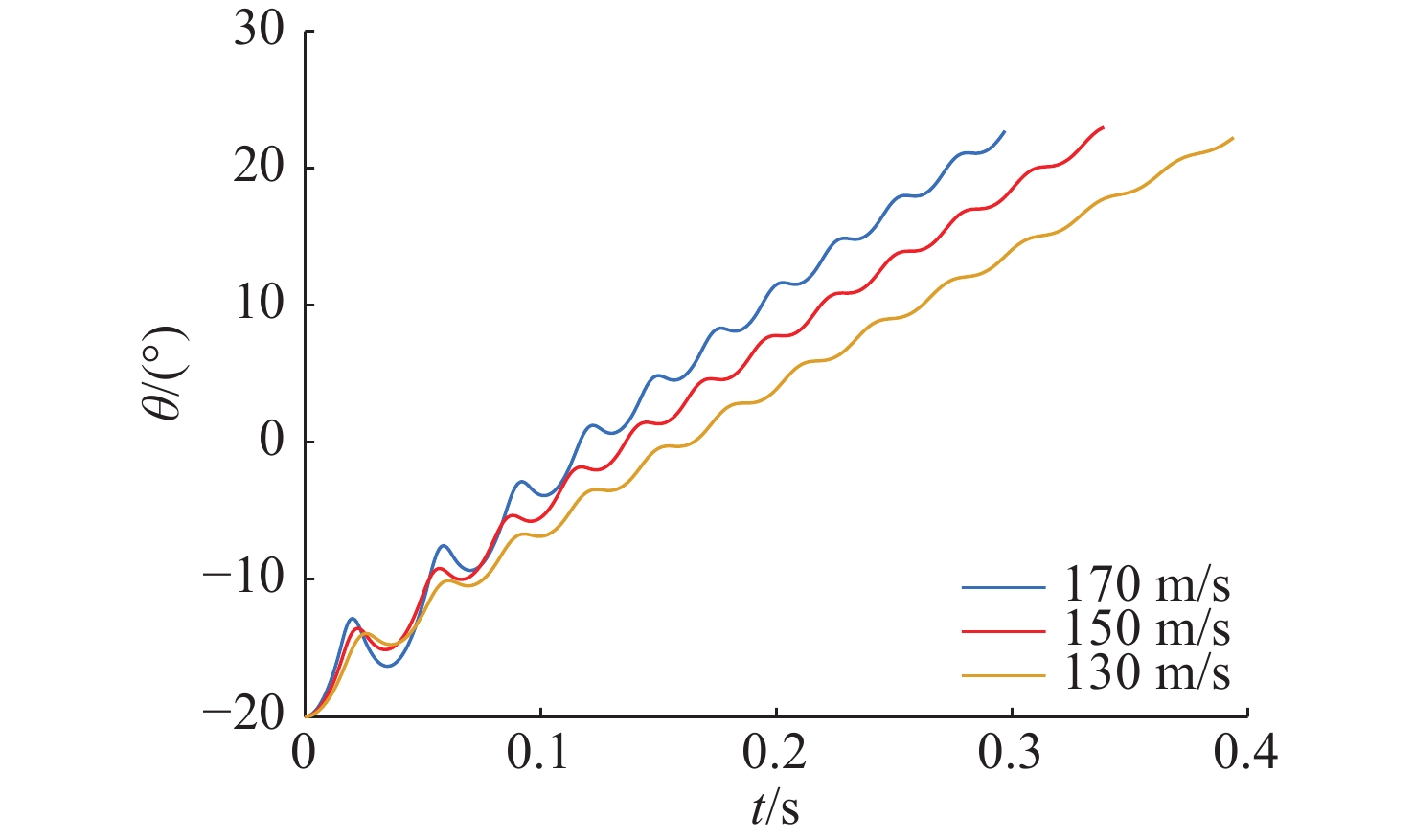
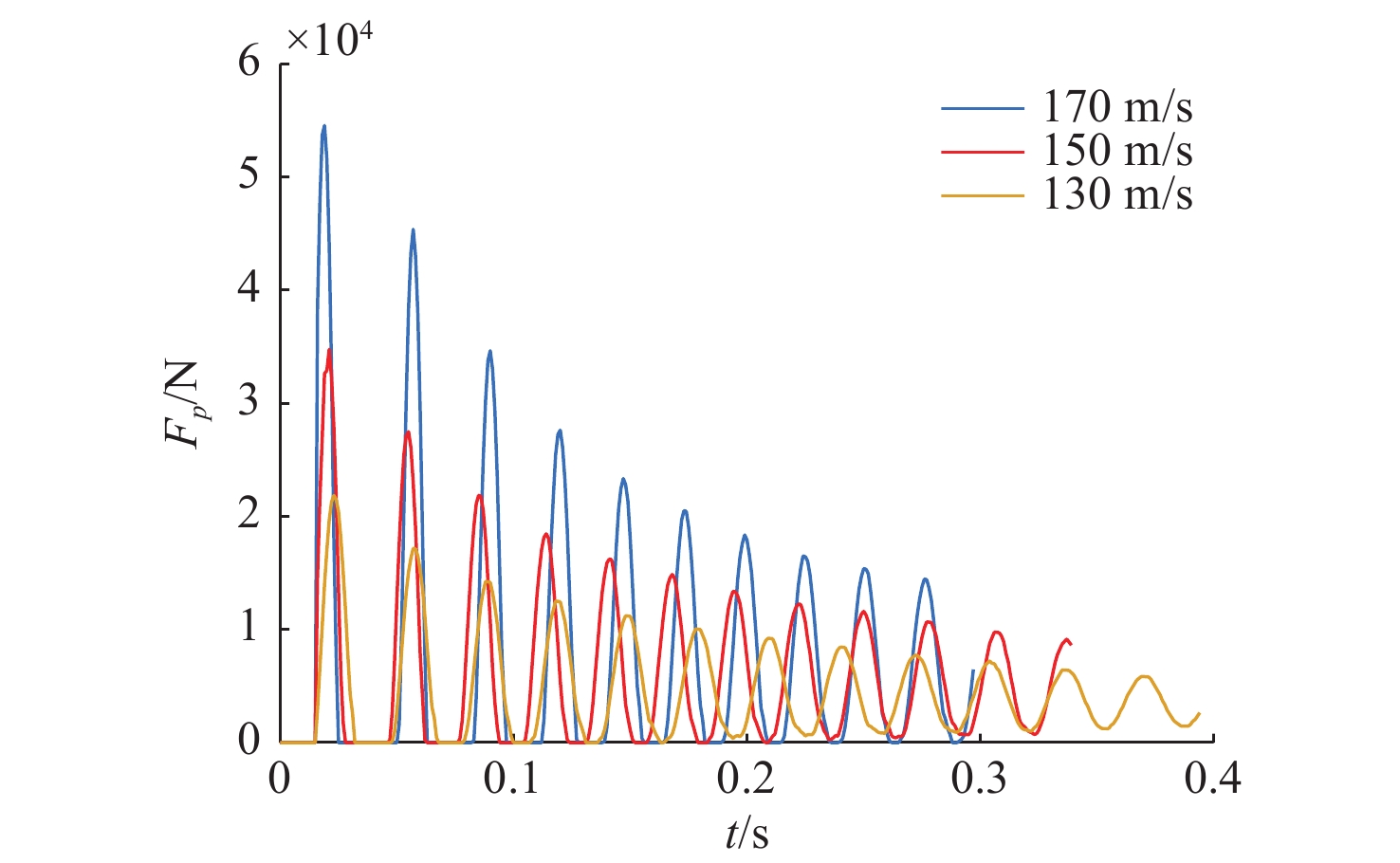
摘要: 为了研究跨介质航行器的水下弹道及相关动力学特性, 以某跨介质航行器为研究对象, 基于动量定理和动量矩定理建立动力学方程, 并对不同速度和空化器倾斜角下的动力学特性进行分析。结果表明: 增加初始速度会使航行器水平航行距离和航行深度略微减少, 速度下降变快; 增加空化器倾斜角亦会导致航行器水平航行距离和航行深度略微减少; 减小初始角度对航行器水平航行距离与结束计算时的角度有较大影响, 但几乎不影响加速度与受力特性。Abstract: In order to study the underwater trajectory and related dynamics characteristics of trans-medium vehicles, a trans-medium vehicle was used as the research object. The dynamics equations were established based on the momentum theorem and the moment of momentum theorem, and the dynamics characteristics of the trans-medium vehicle at different velocities and cavitator’s angles were analyzed. The results show that increasing the initial velocity will slightly reduce the horizontal navigation distance and navigation depth of the vehicle, and the velocity will decrease faster; increasing the cavitator’s angle will also lead to a slight decrease in the horizontal navigation distance and navigation depth of the vehicle. Reducing the initial angle has a significant impact on the horizontal navigation distance of the vehicle and the angle at the end of the calculation, but it almost does not affect the acceleration and force characteristics.
-
Key words:
- trans-medium vehicle /
- underwater trajectory /
- dynamics characteristics
-
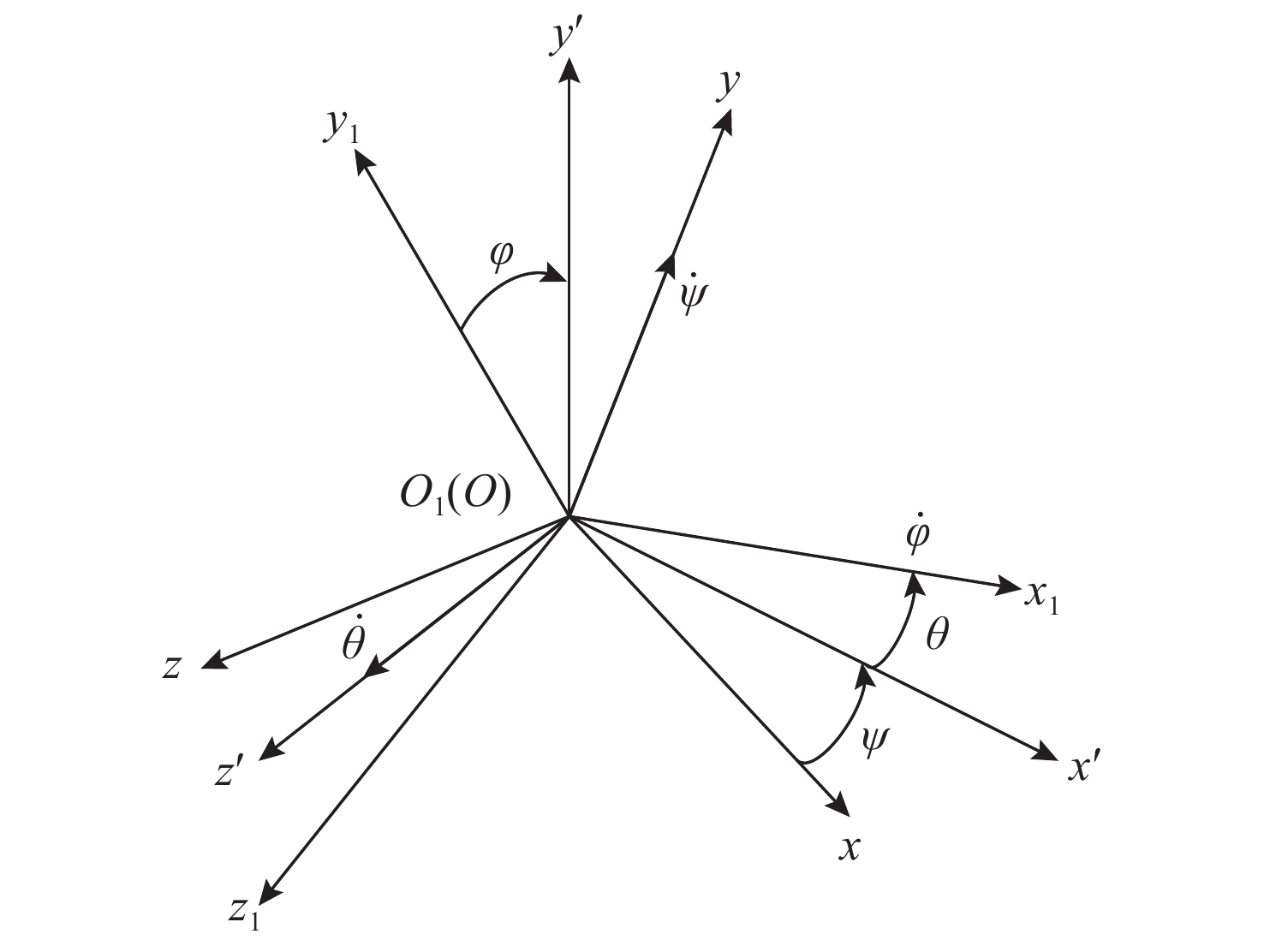
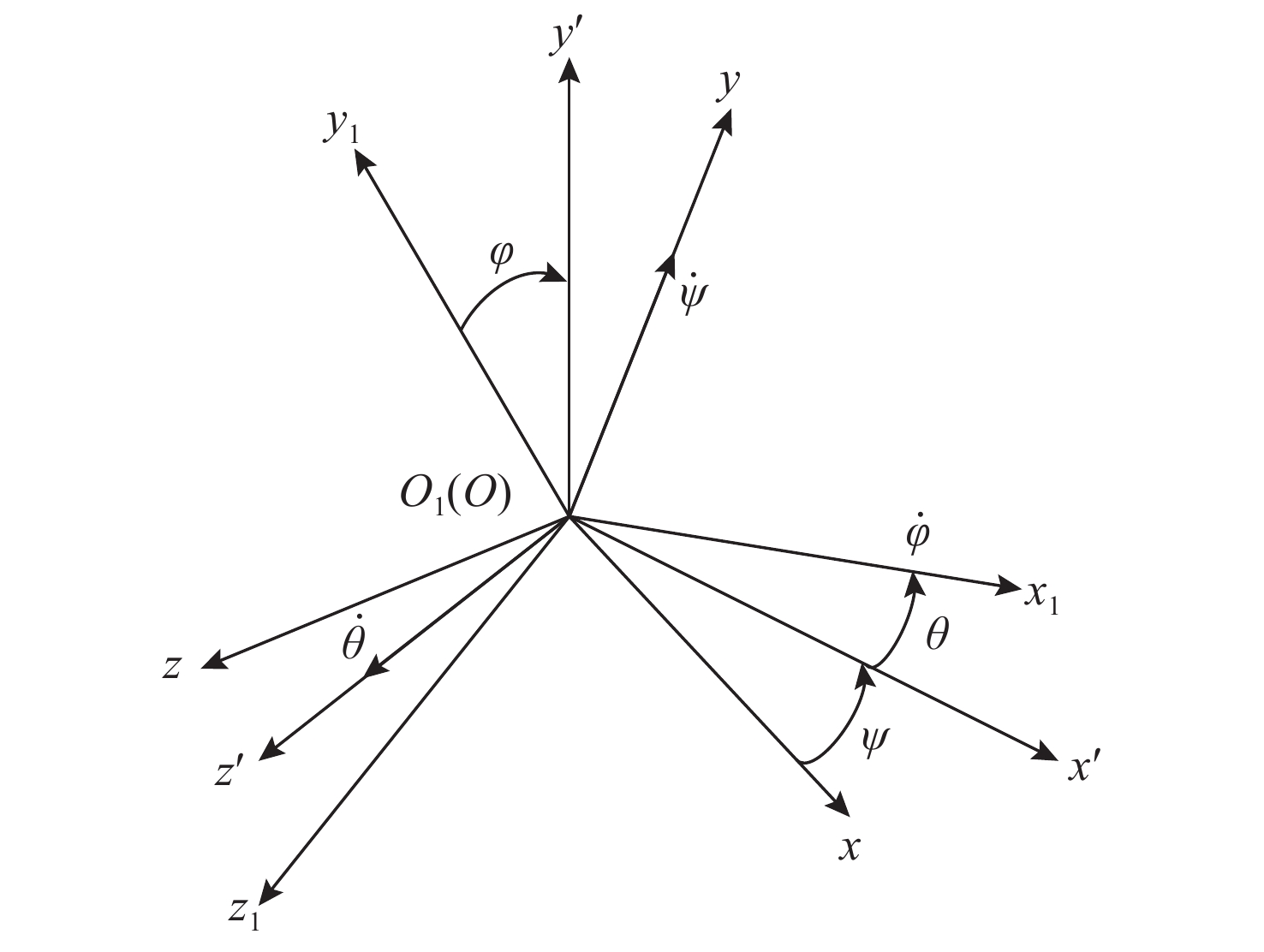
图 1 地面坐标系与体坐标系相对位置关系
Figure 1. The relative position of the ground coordinate system and the body coordinate system
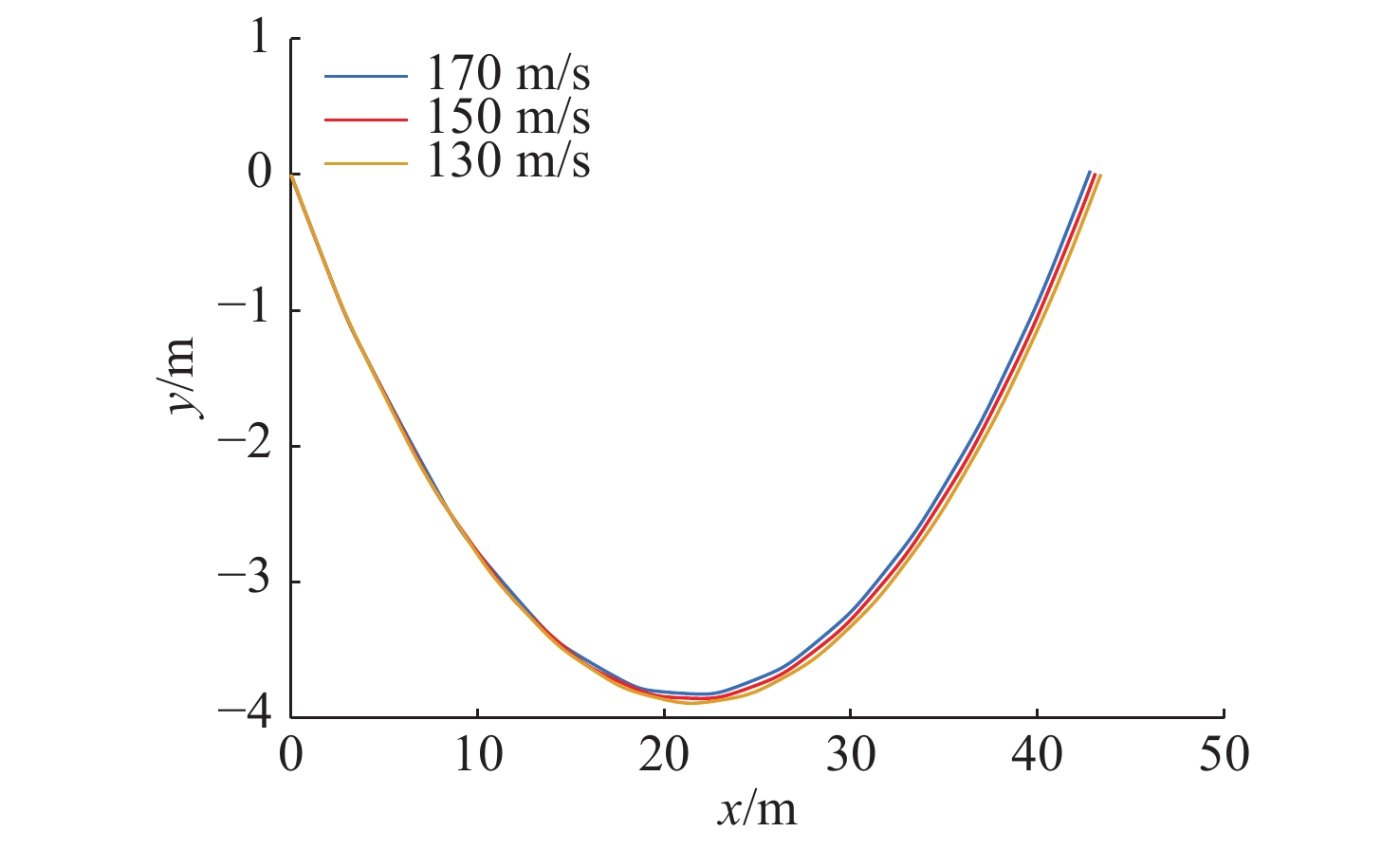
图 6 不同初始速度下航行器纵向弹道变化曲线
Figure 6. Curves of longitudinal trajectory of the vehicle at different initial speeds
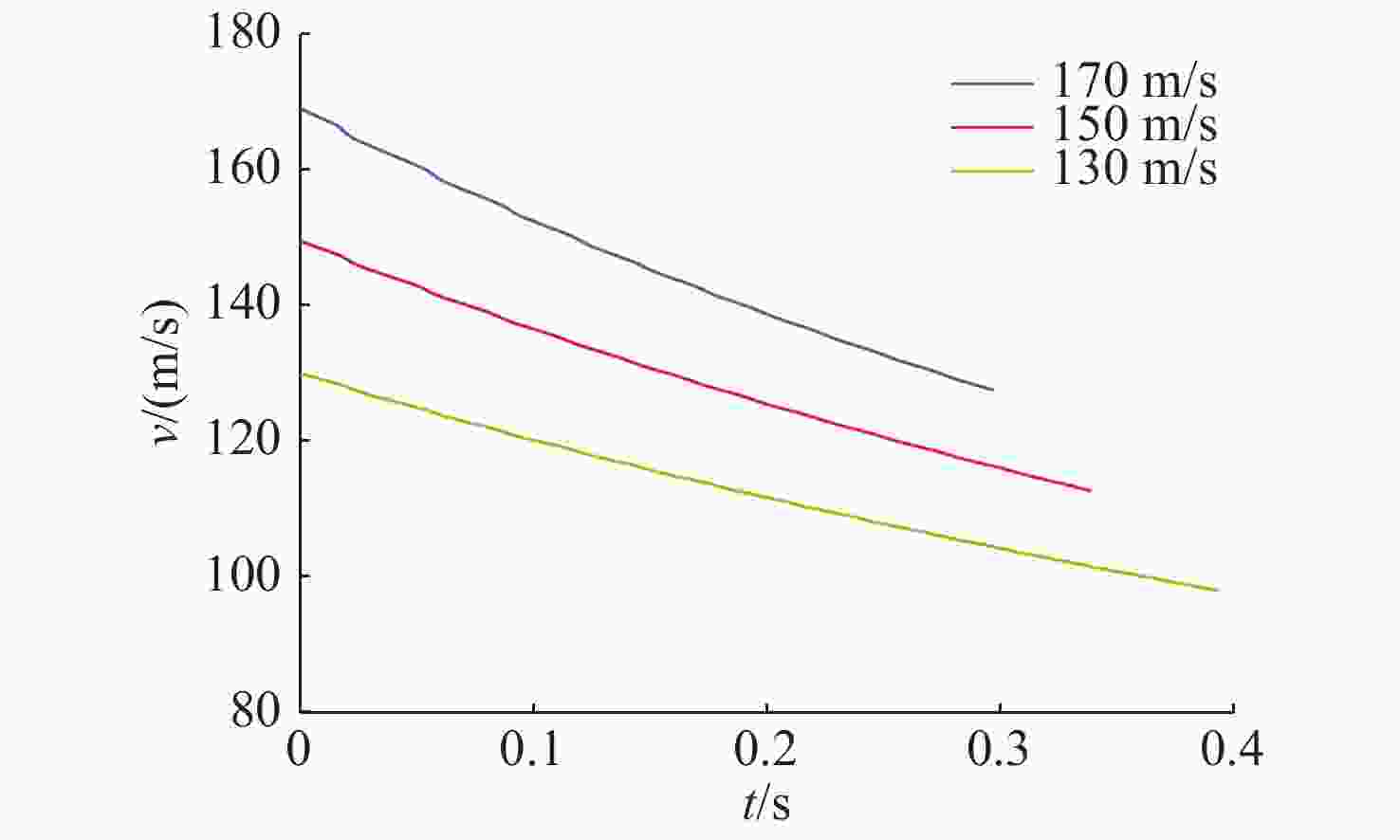
图 7 不同初始速度下航行器速度变化曲线
Figure 7. Curves of velocity of the vehicle at different initial speeds
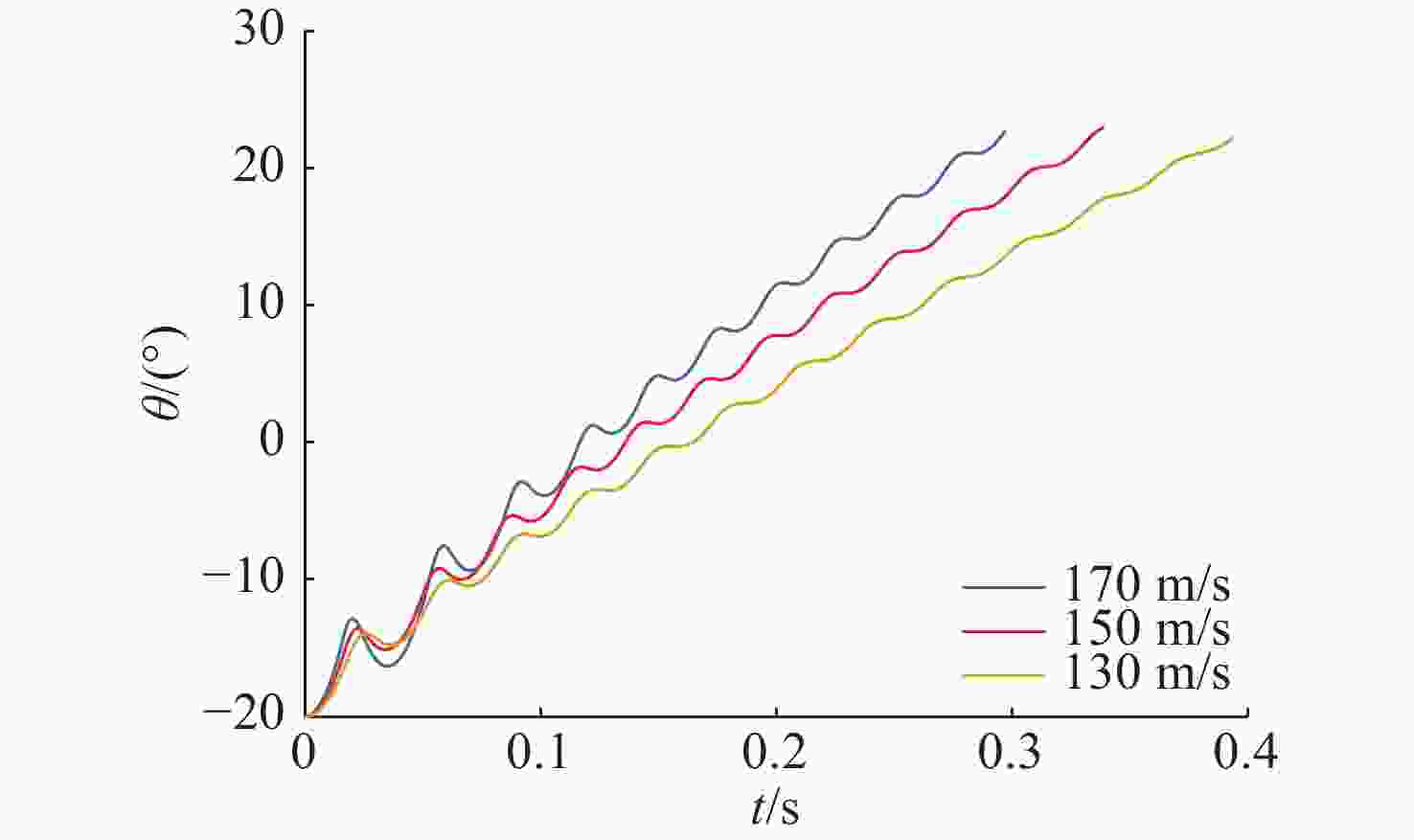
图 8 不同初始速度下航行器俯仰角变化曲线
Figure 8. Curves of pitch angle of the vehicle at different initial speeds
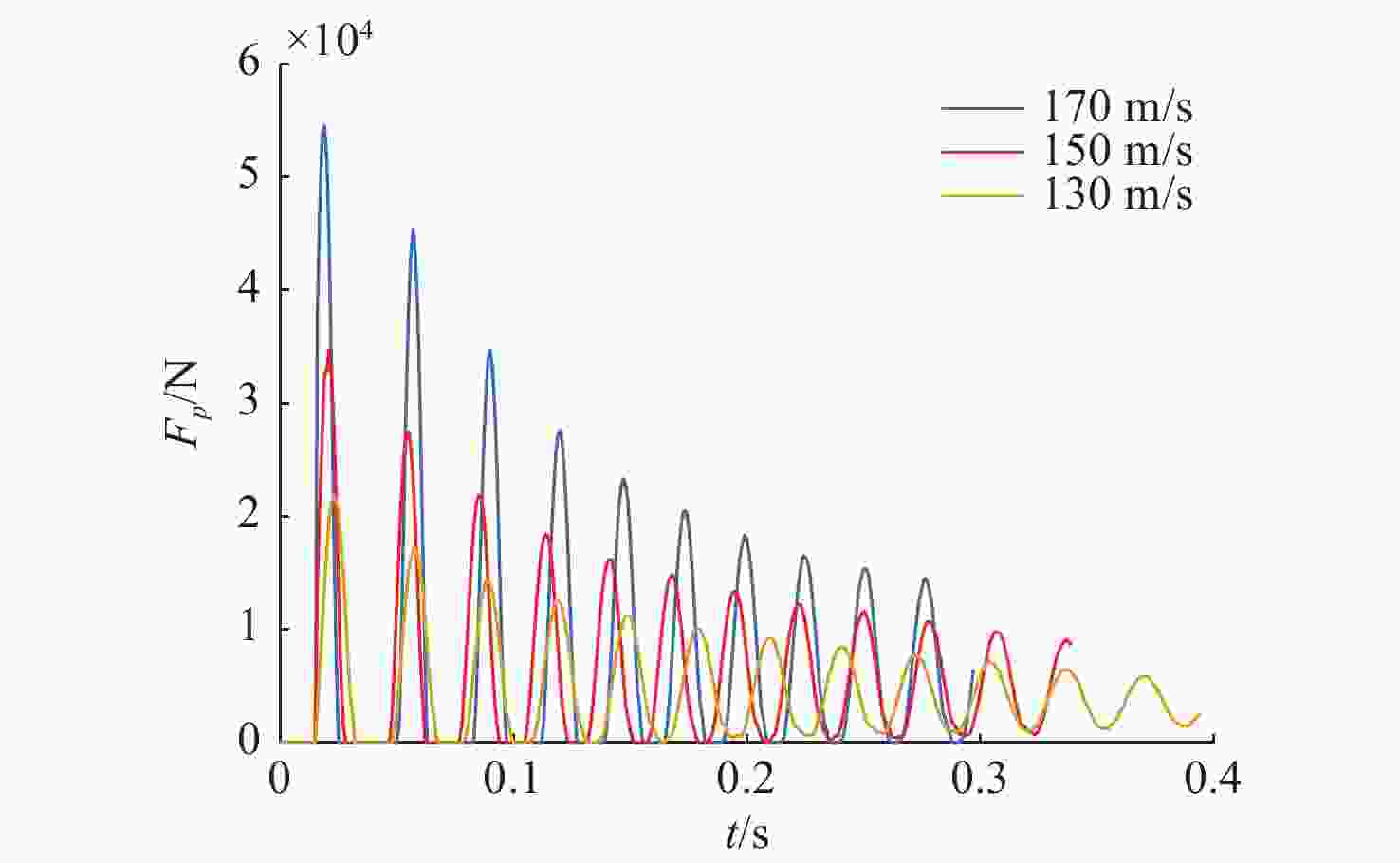
图 9 不同初始速度下航行器尾拍力变化曲线
Figure 9. Curves of tail beat force of the vehicle at different initial speeds
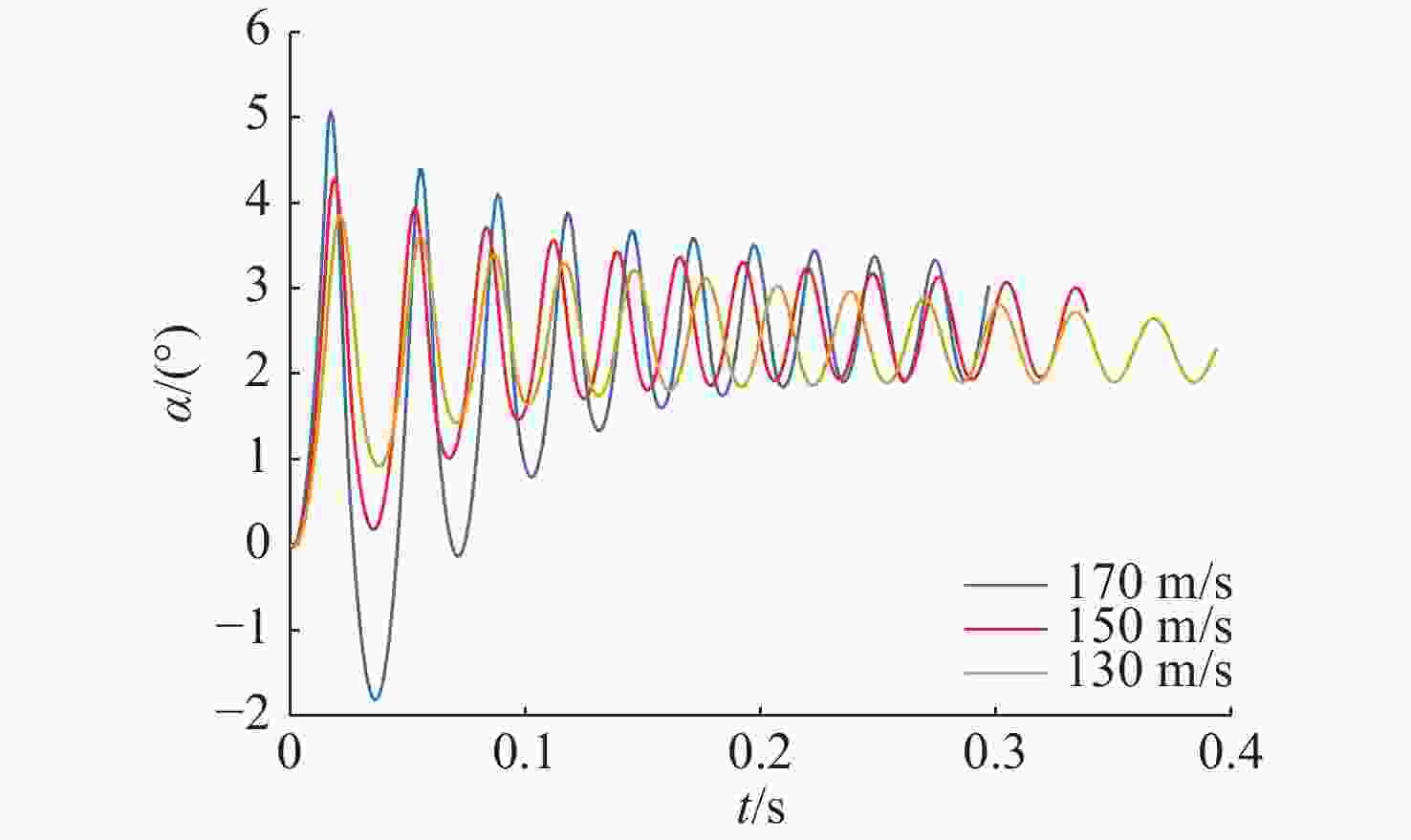
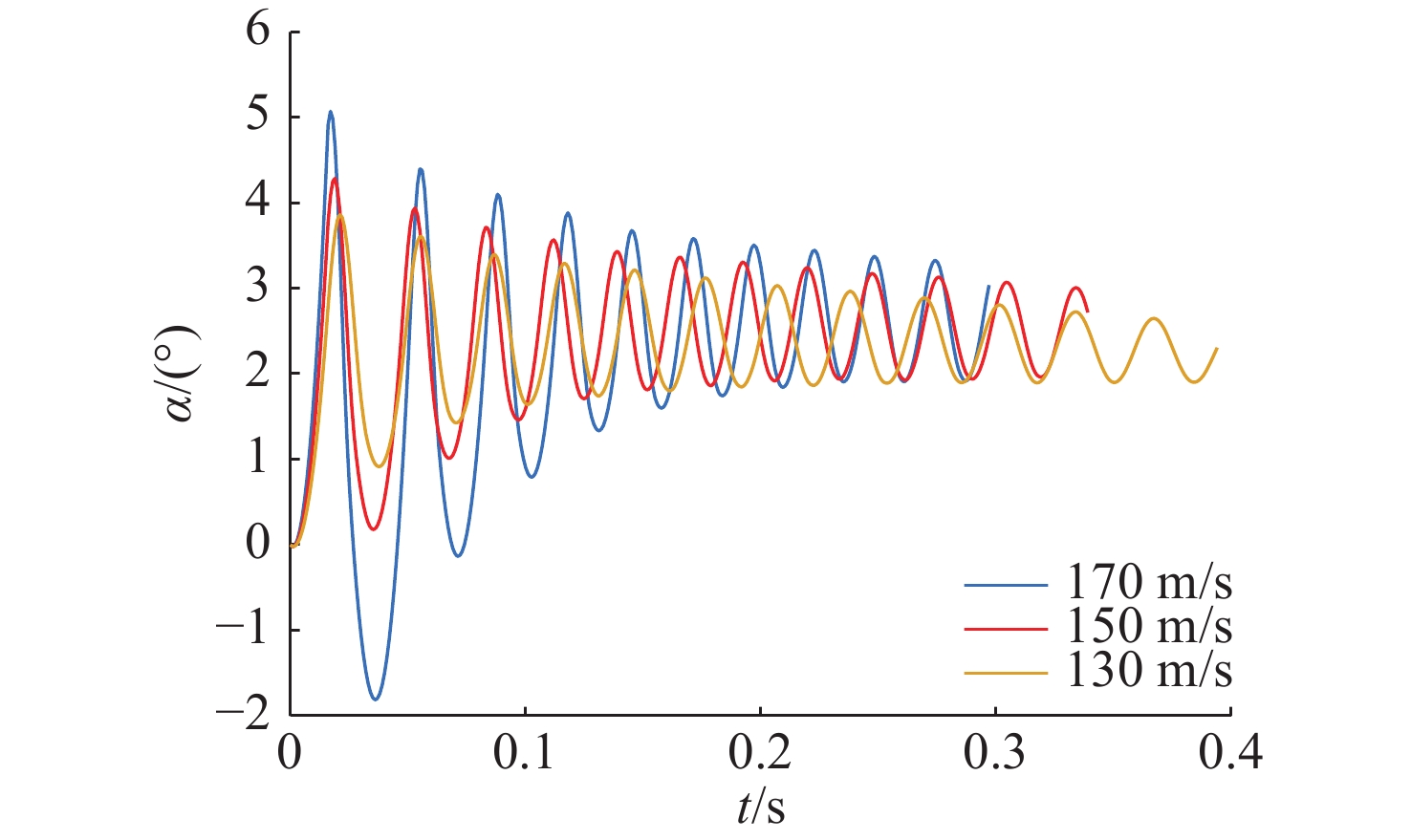
图 10 不同初始速度下航行器攻角变化曲线
Figure 10. Curves of attack angle of the vehicle at different initial speeds
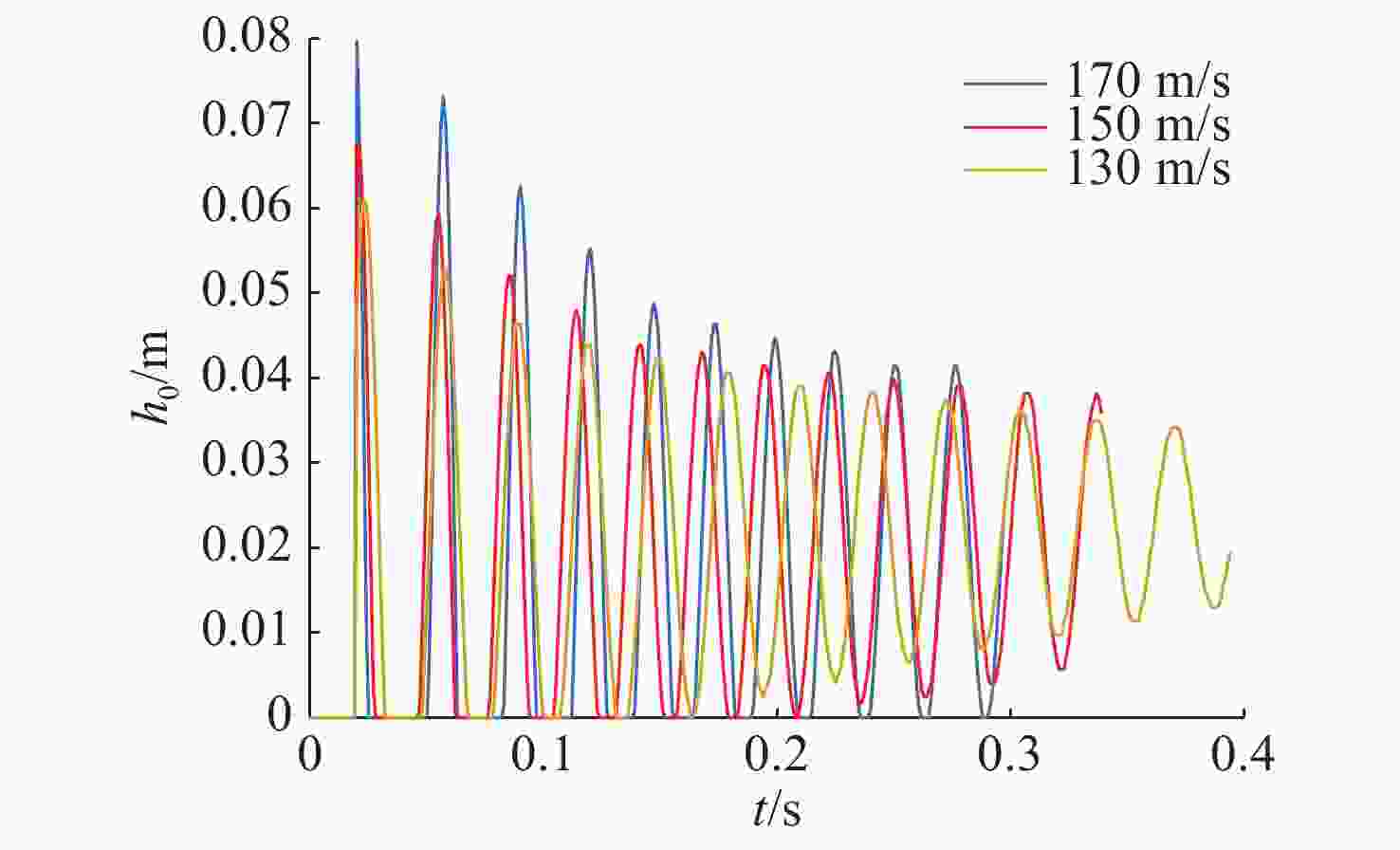
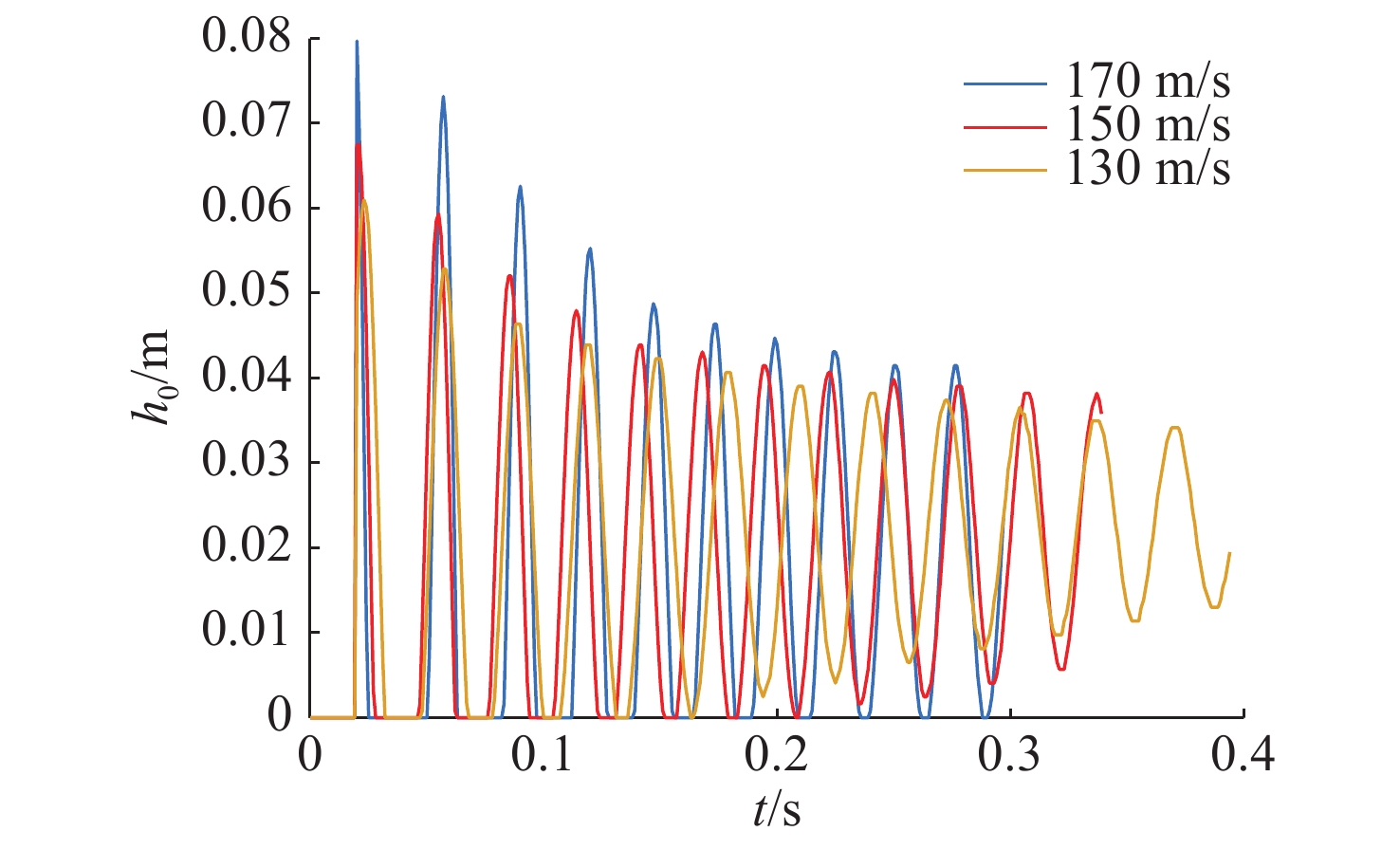
图 11 不同初始速度下航行器浸没深度变化曲线
Figure 11. Curves of immerse depth of the vehicle at different initial speeds
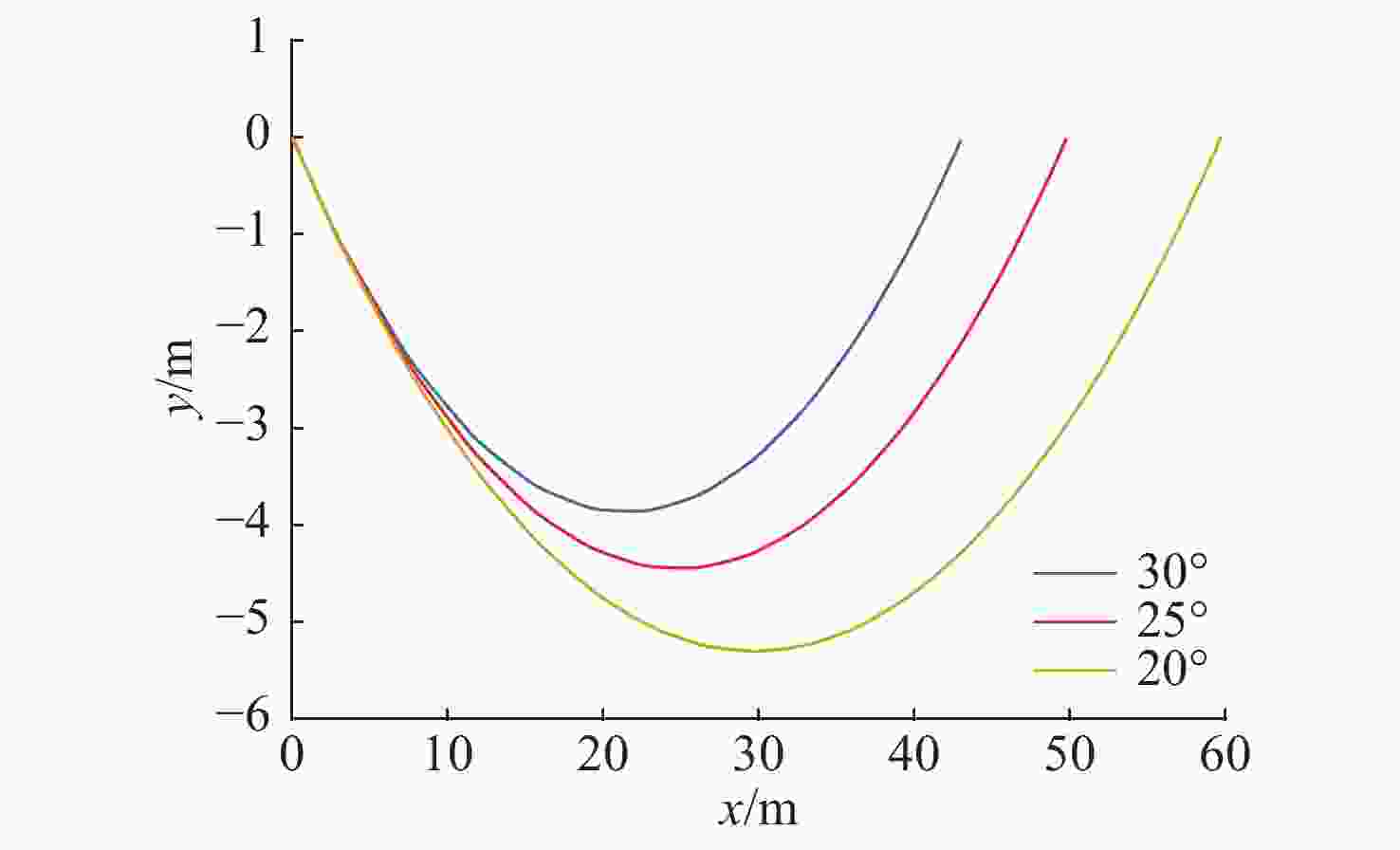
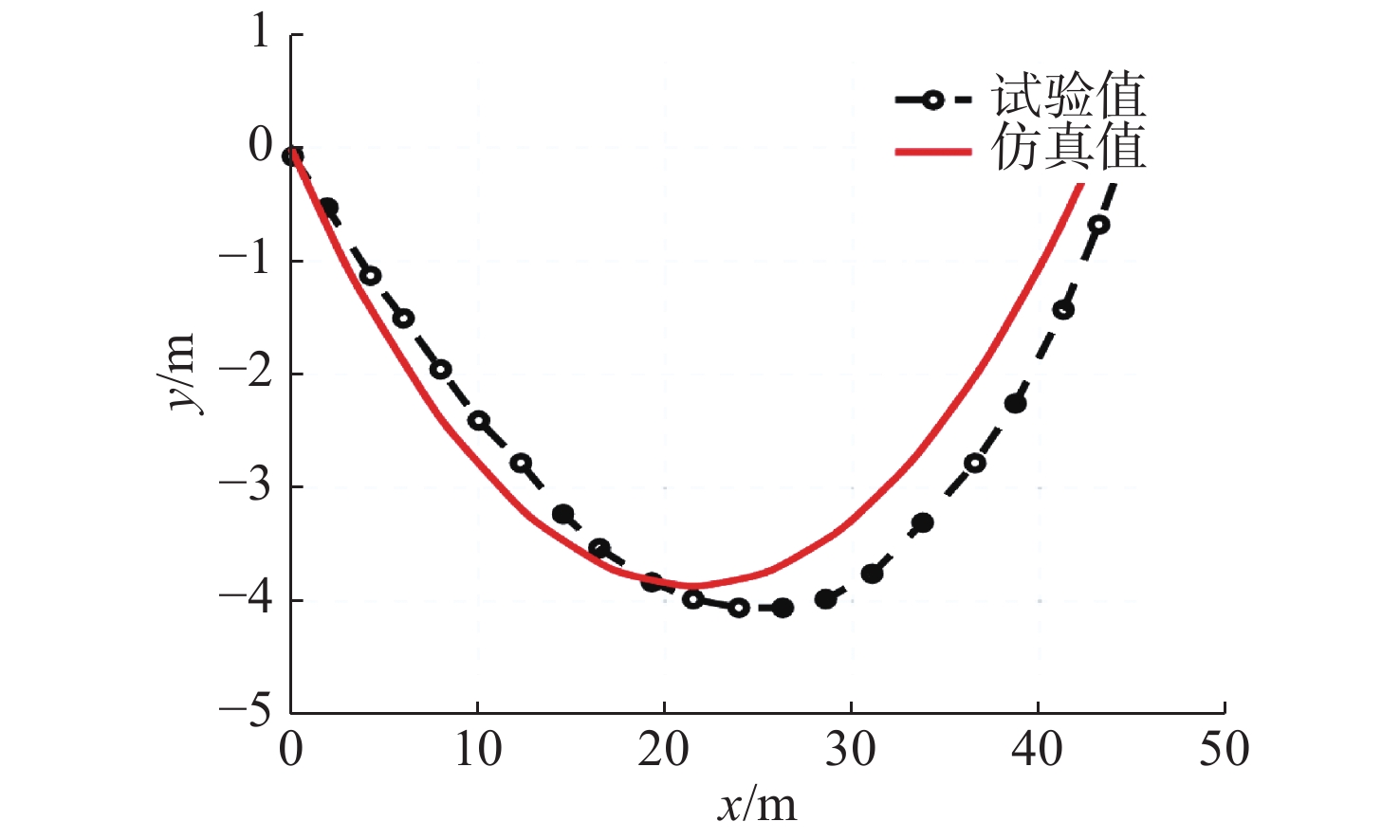
图 12 不同空化器倾斜角下航行器纵向弹道变化曲线
Figure 12. Curves of longitudinal trajectory of the vehicle at different cavitator deflection angles
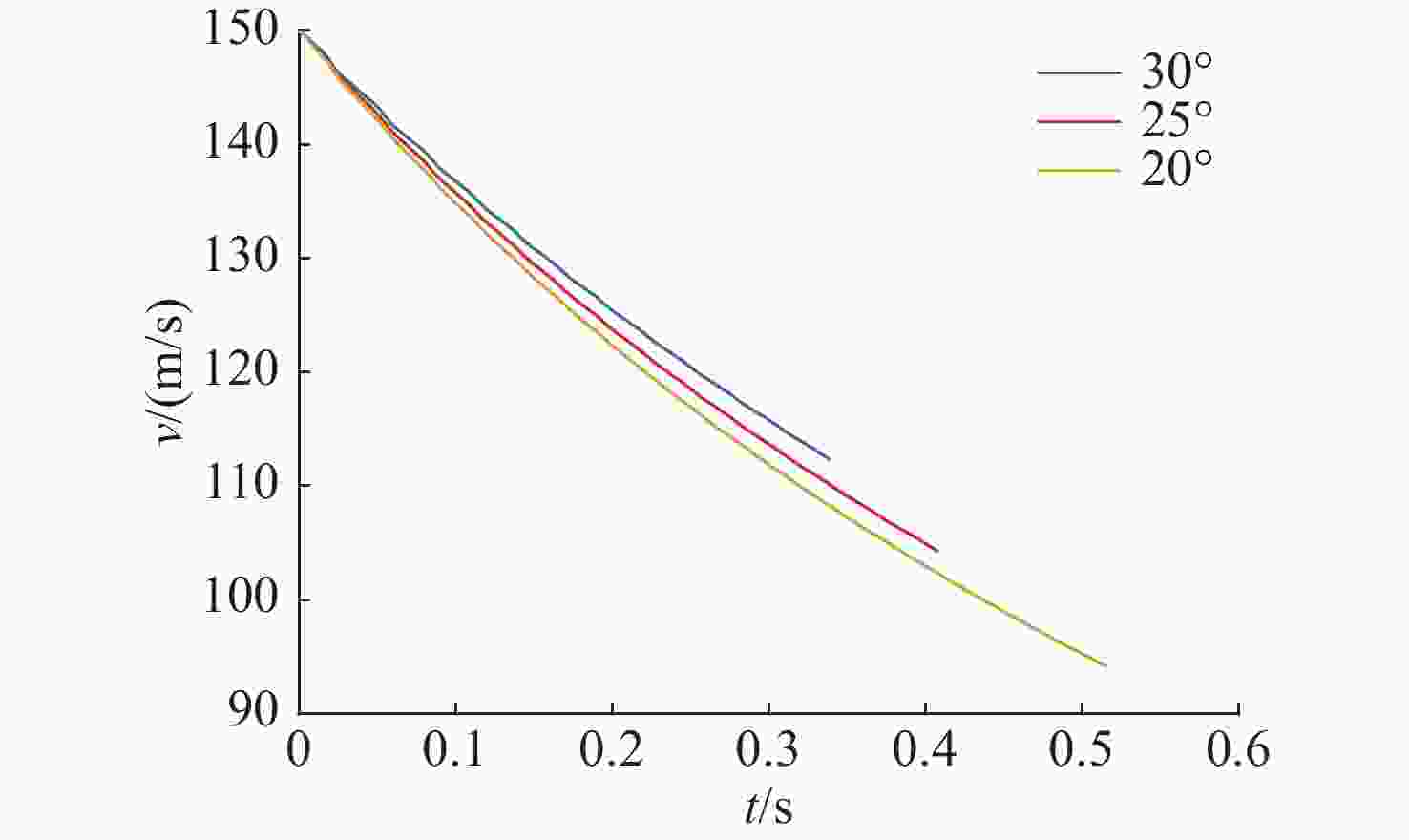
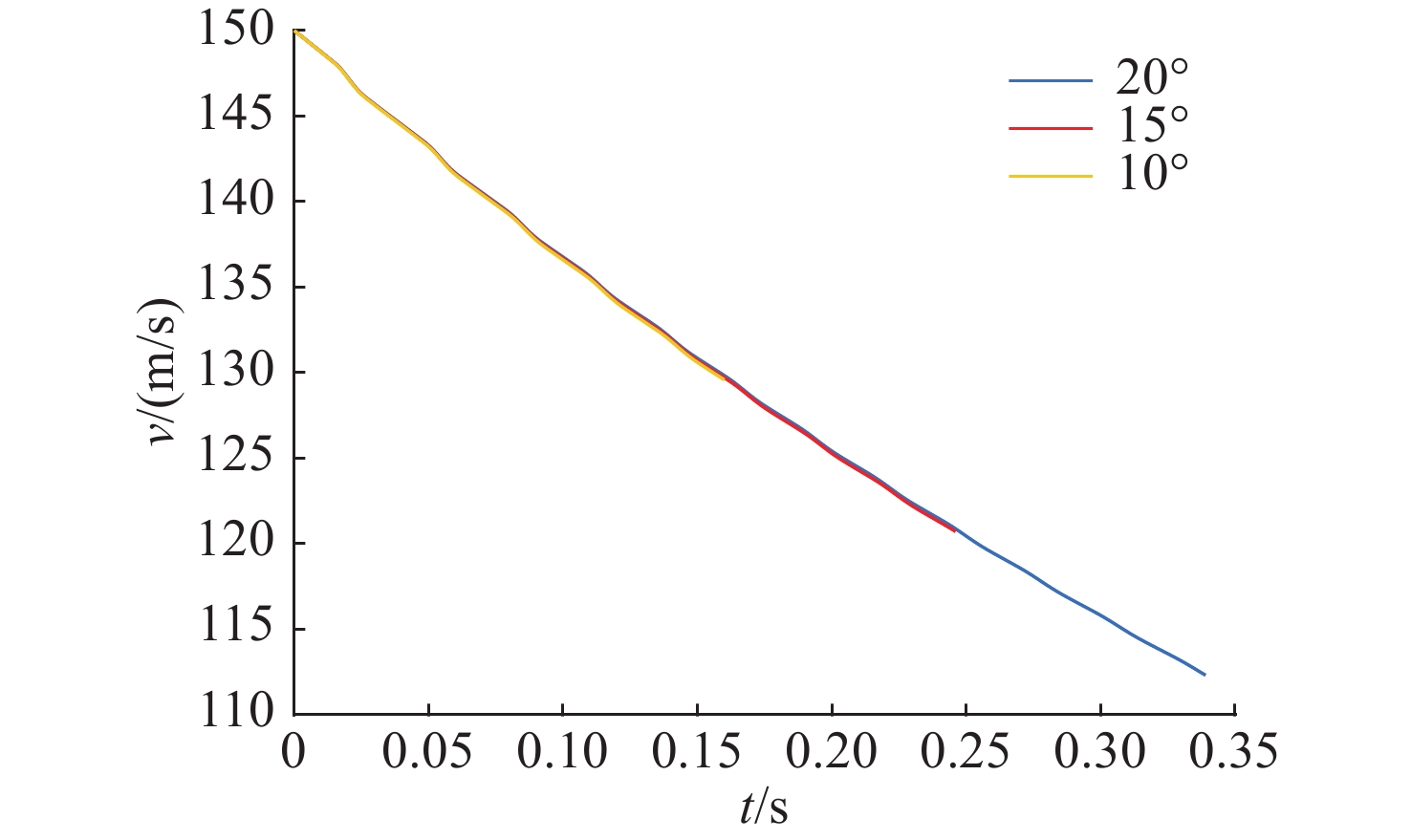
图 13 不同空化器倾斜角下航行器速度变化曲线
Figure 13. Curves of velocity of the vehicle at different cavitator deflection angles
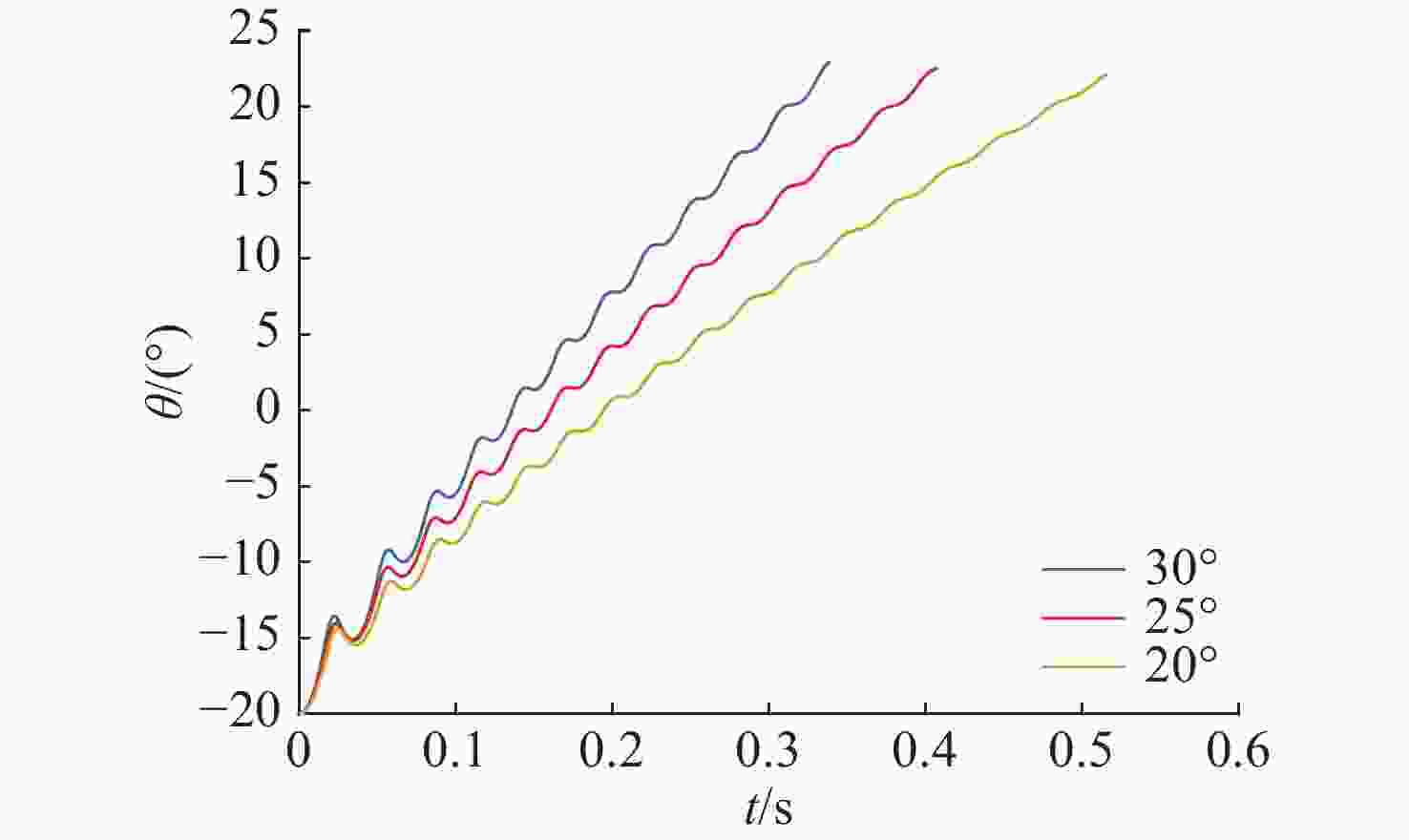
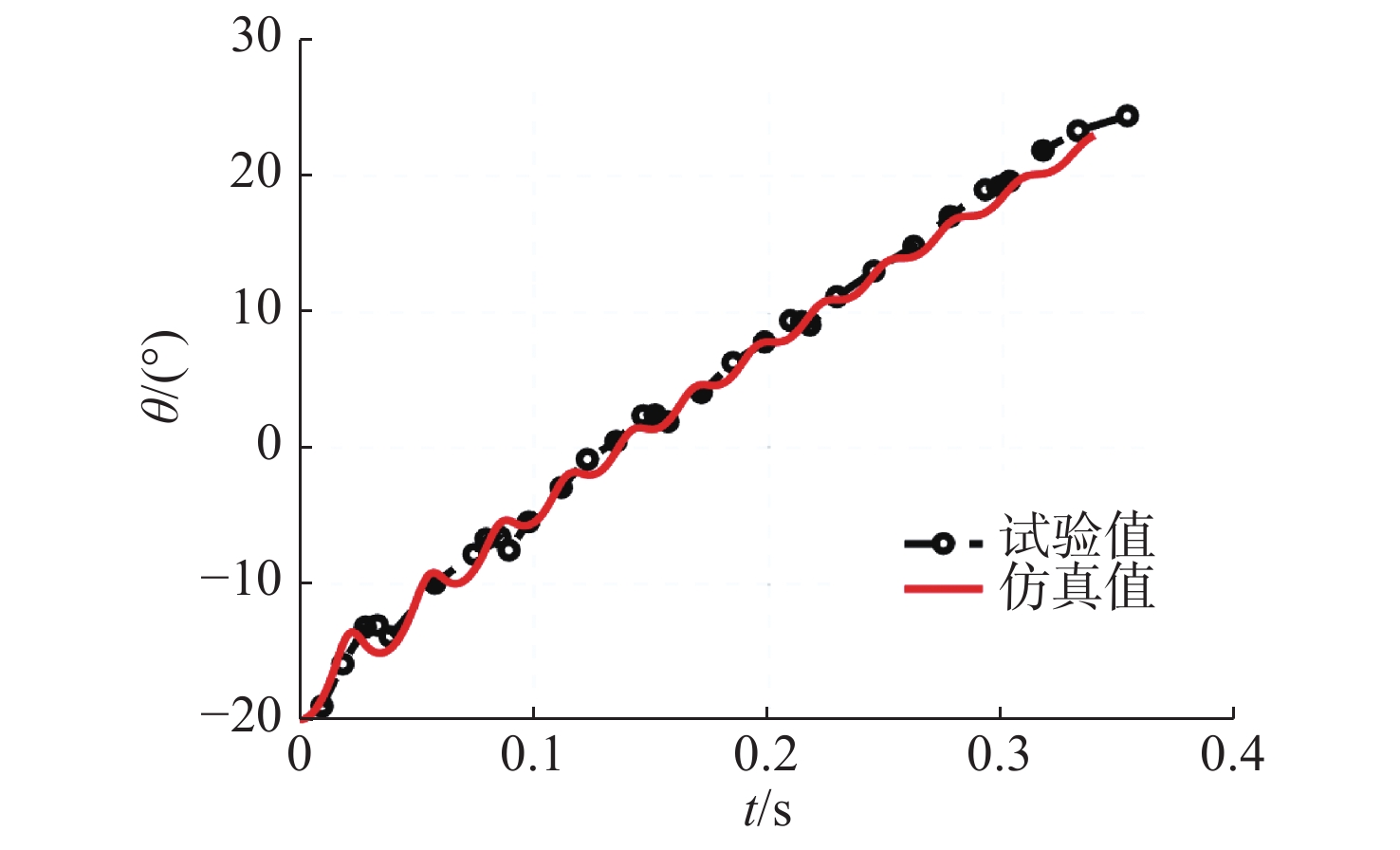
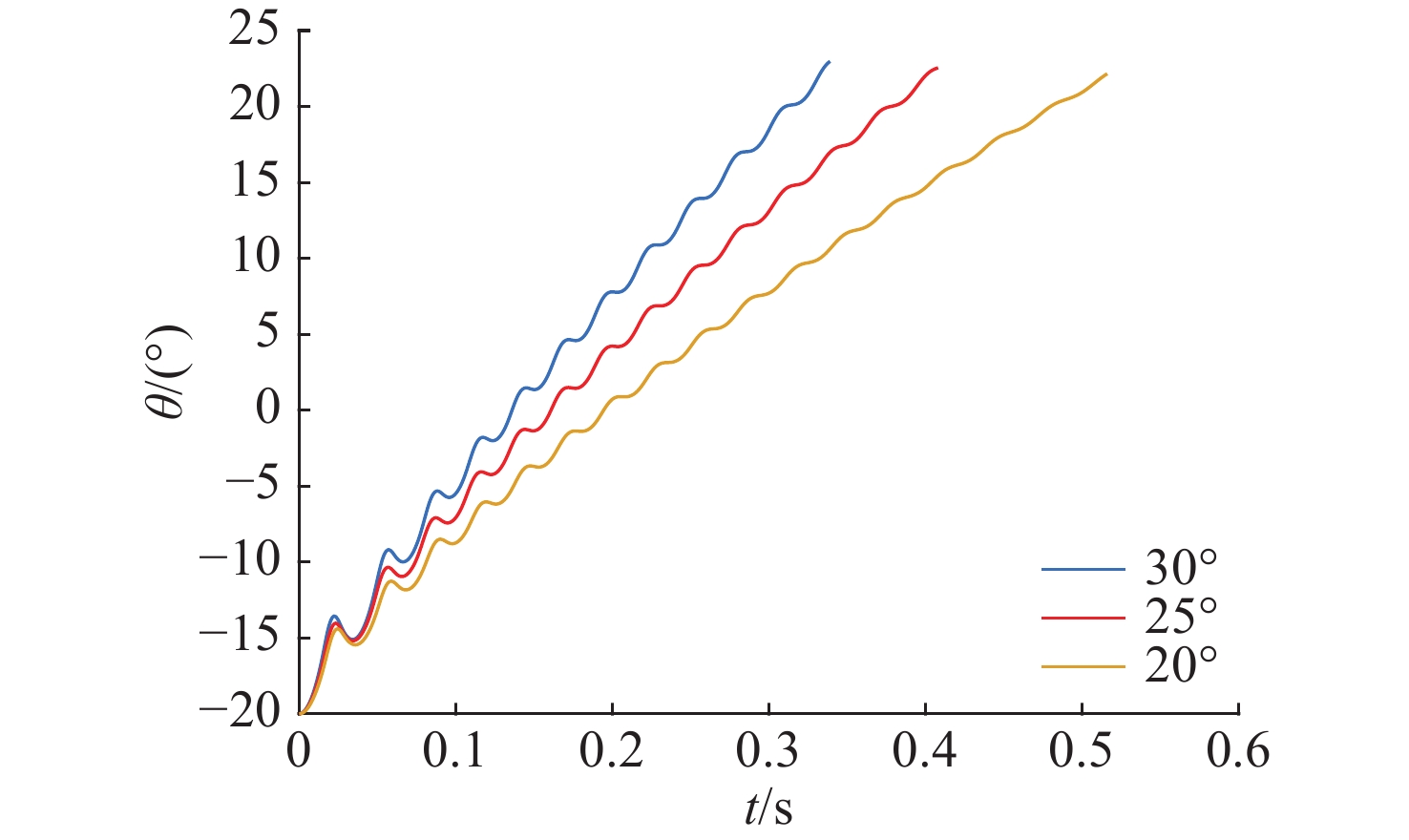
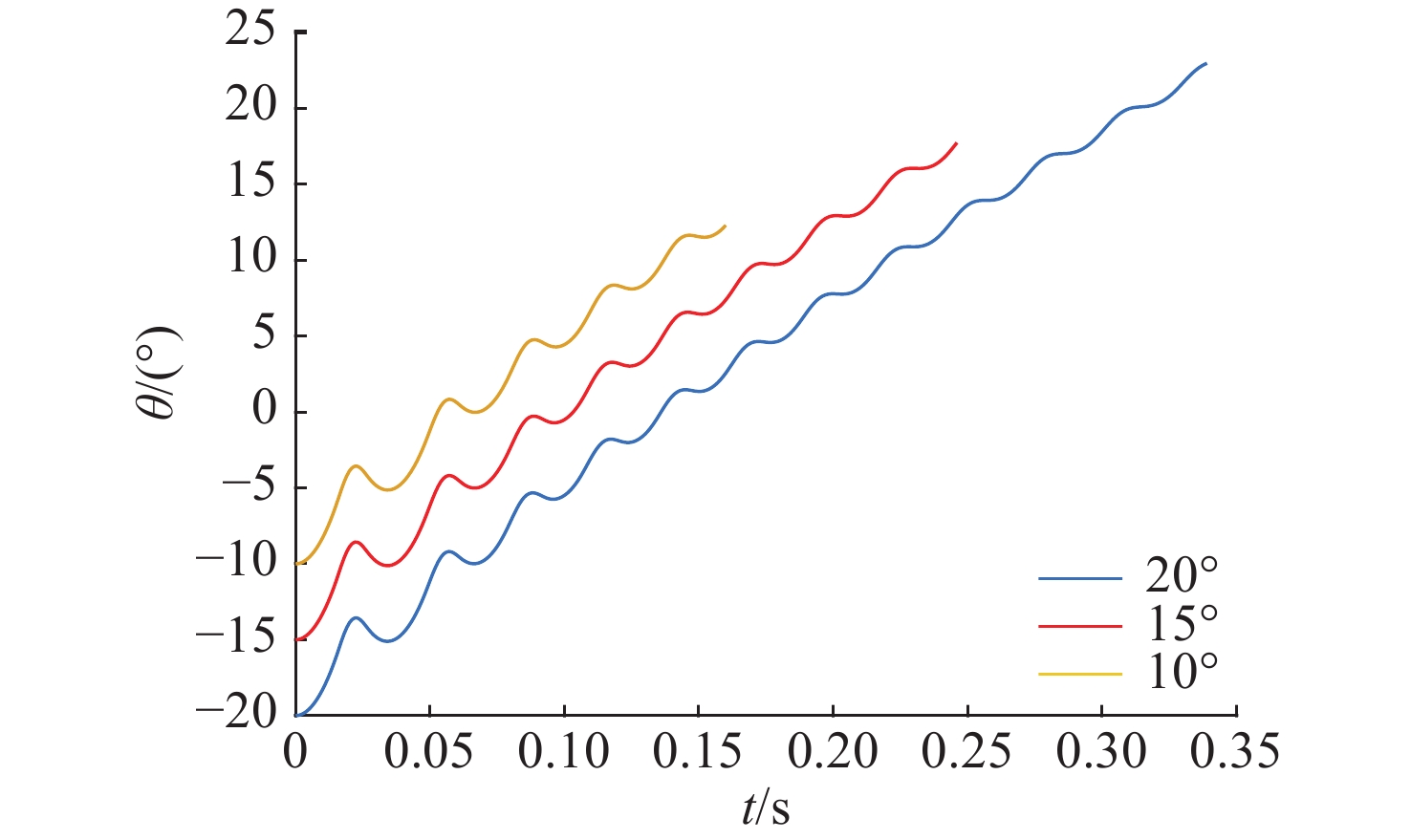
图 14 不同空化器倾斜角下航行器俯仰角变化曲线
Figure 14. Curves of pitch angle of the vehicle at different cavitator deflection angles
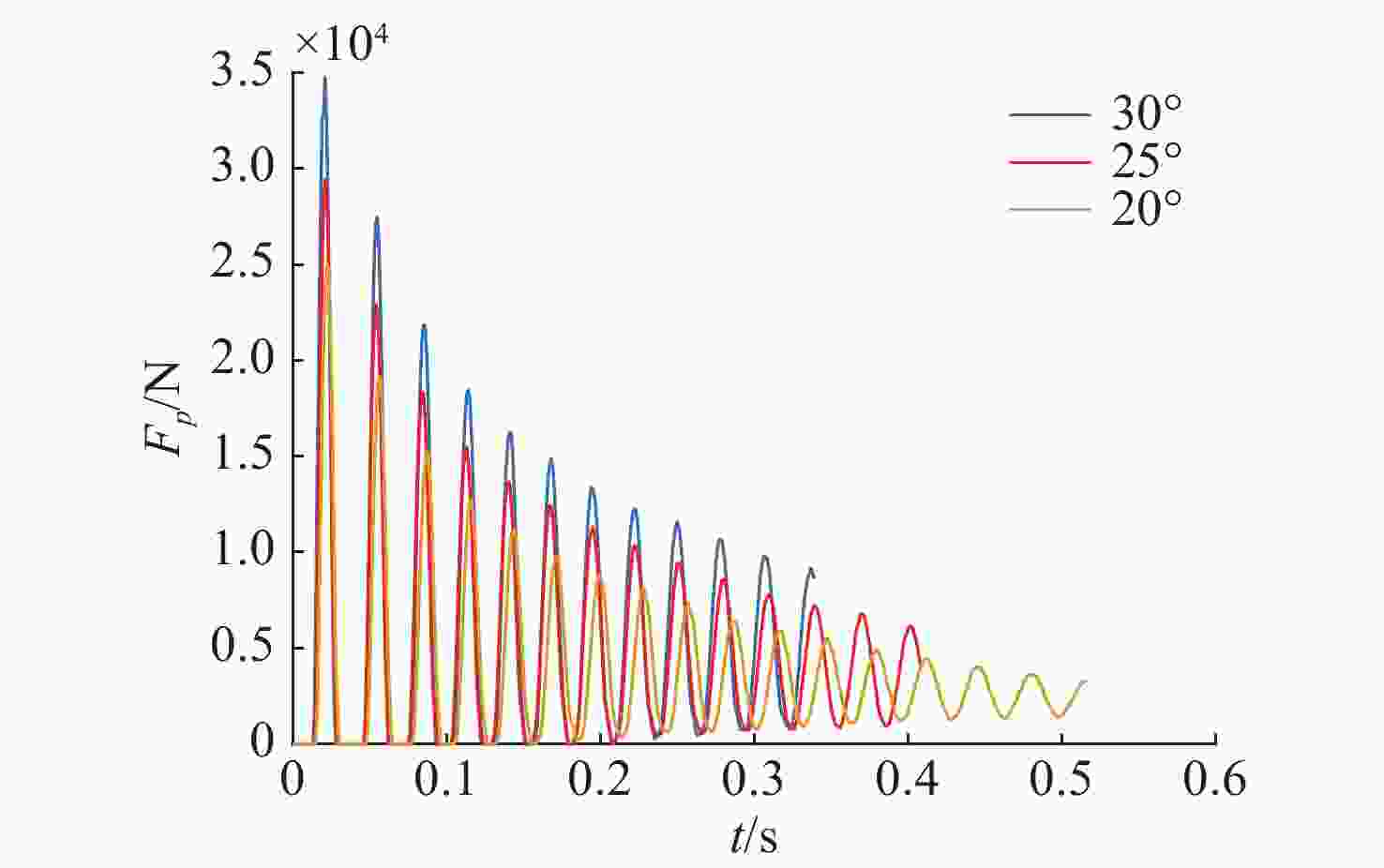
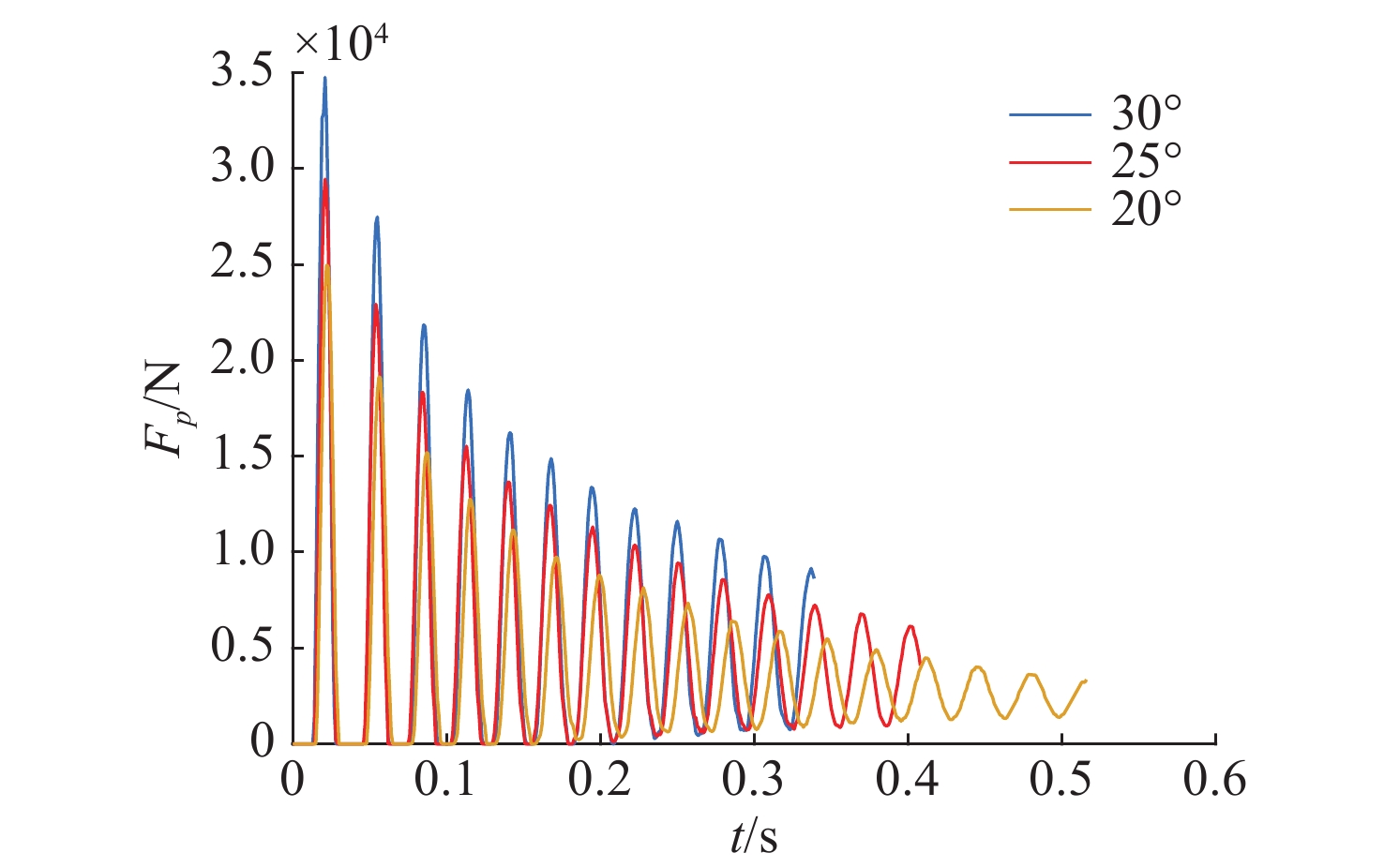
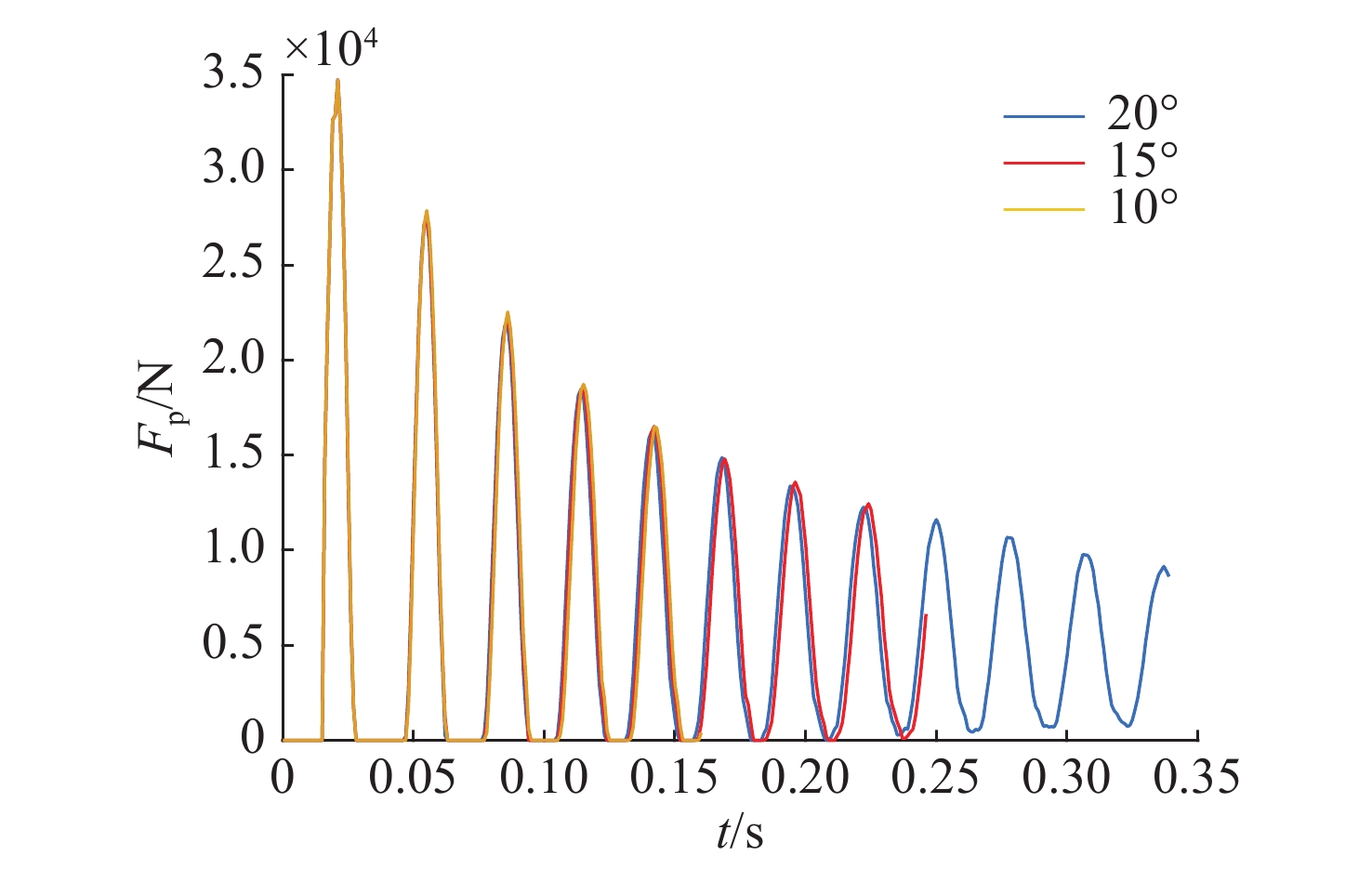
图 15 不同空化器倾斜角下的尾拍力曲线
Figure 15. The tail beat force of different cavitator deflection angle
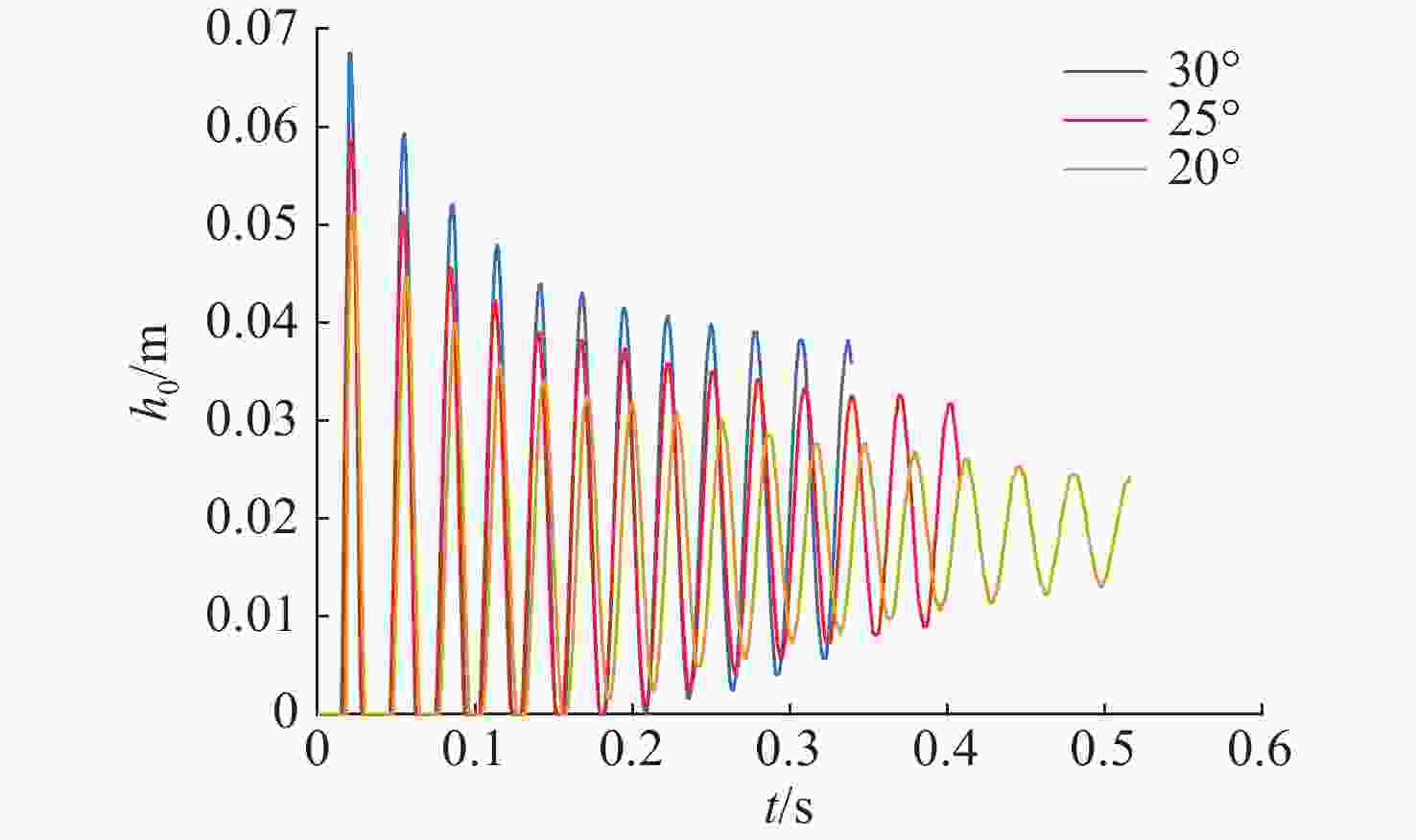
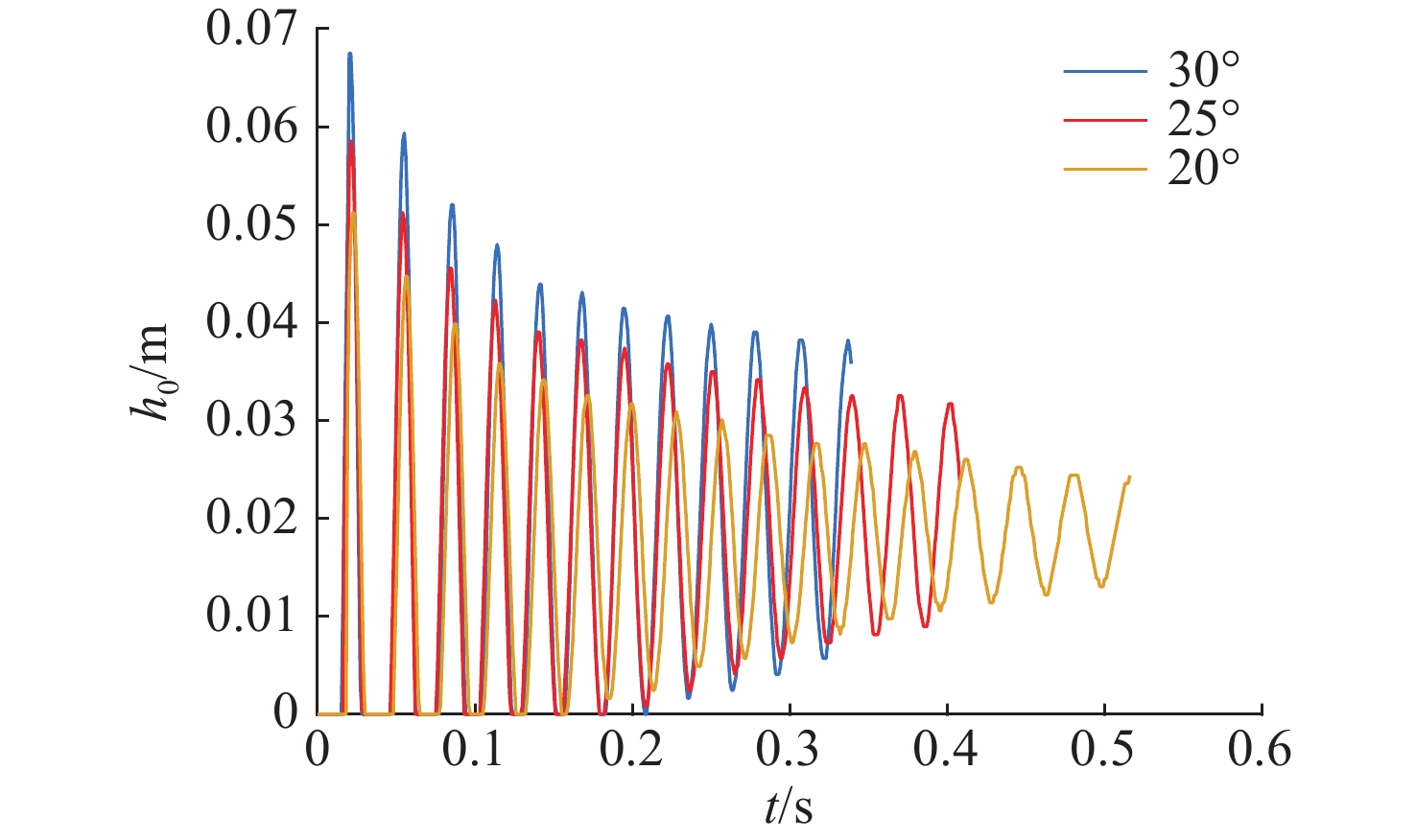
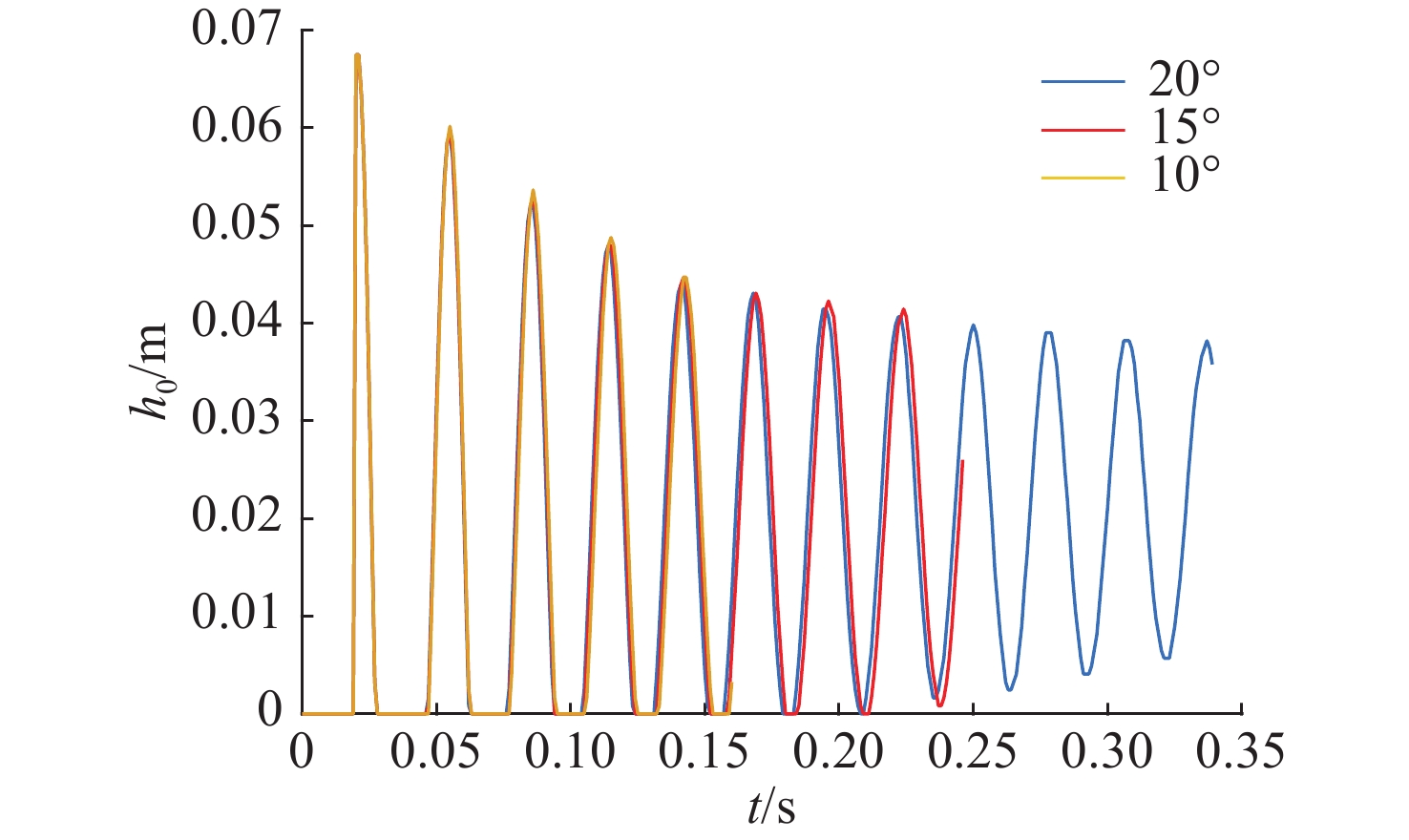
图 16 不同空化器倾斜角下航行器浸没深度变化曲线
Figure 16. Curves of immerse depth of the vehicle at different cavitator deflection angles

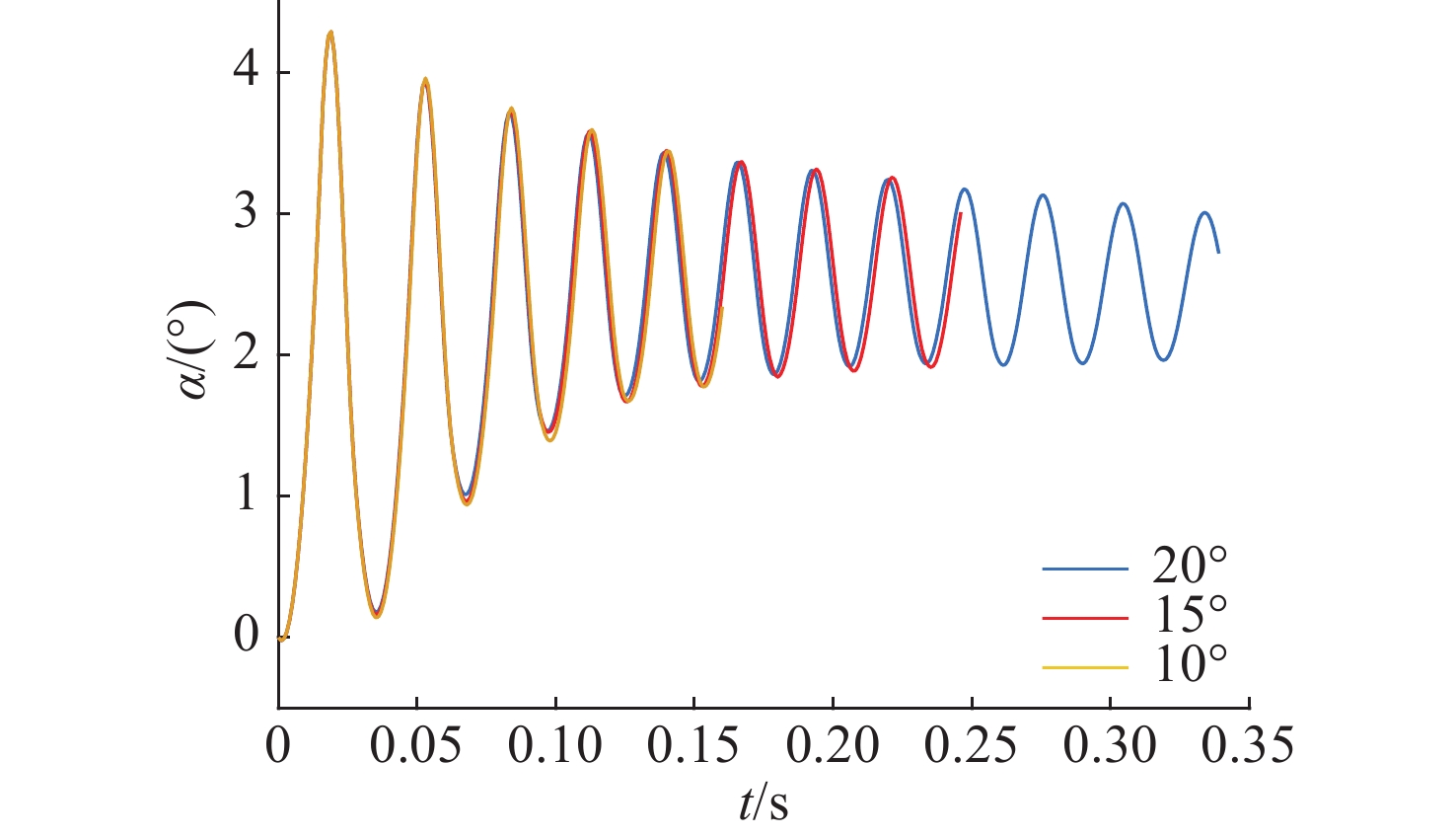
图 17 不同空化器倾斜角下航行器攻角变化曲线
Figure 17. Curves of attack angle of the vehicle at different cavitator deflection angles
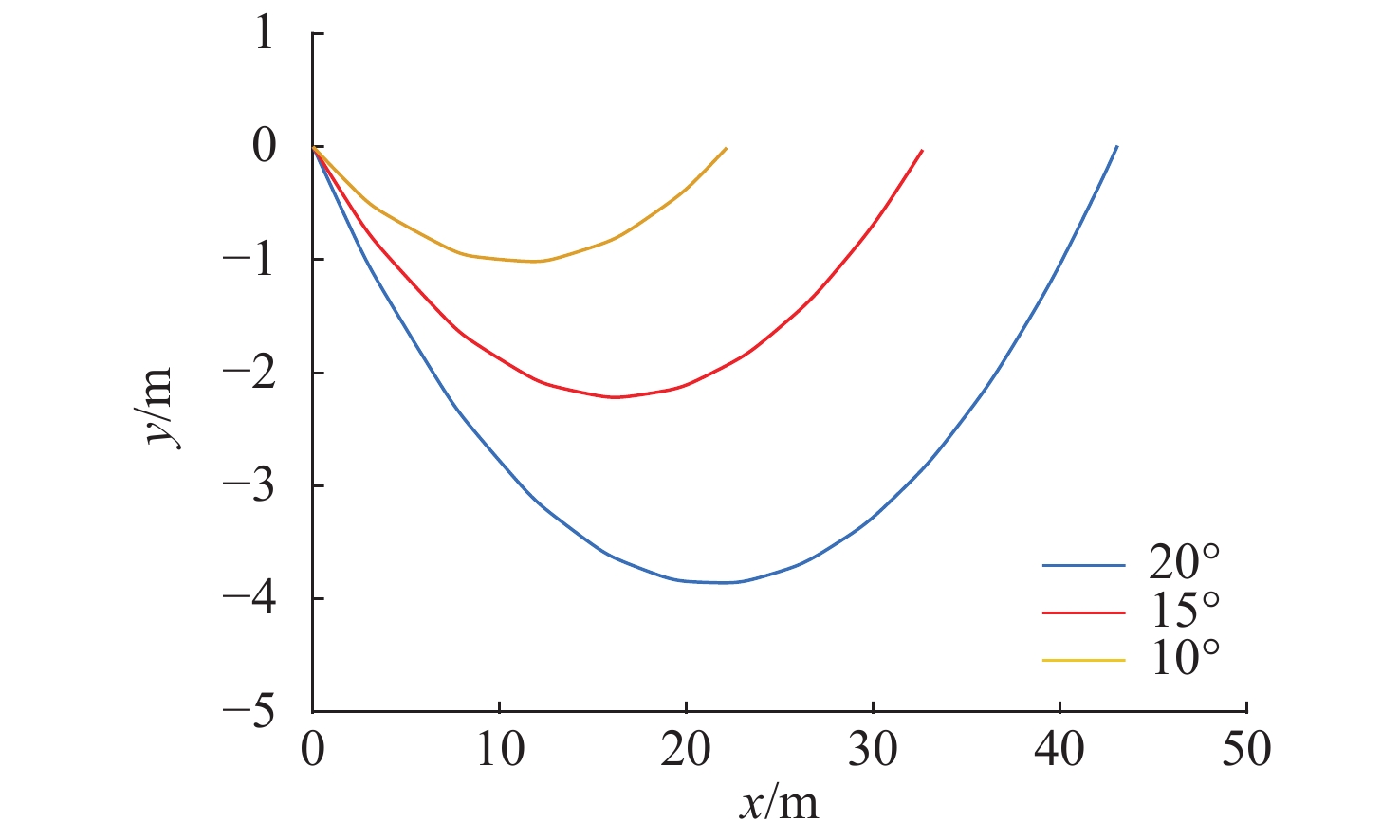
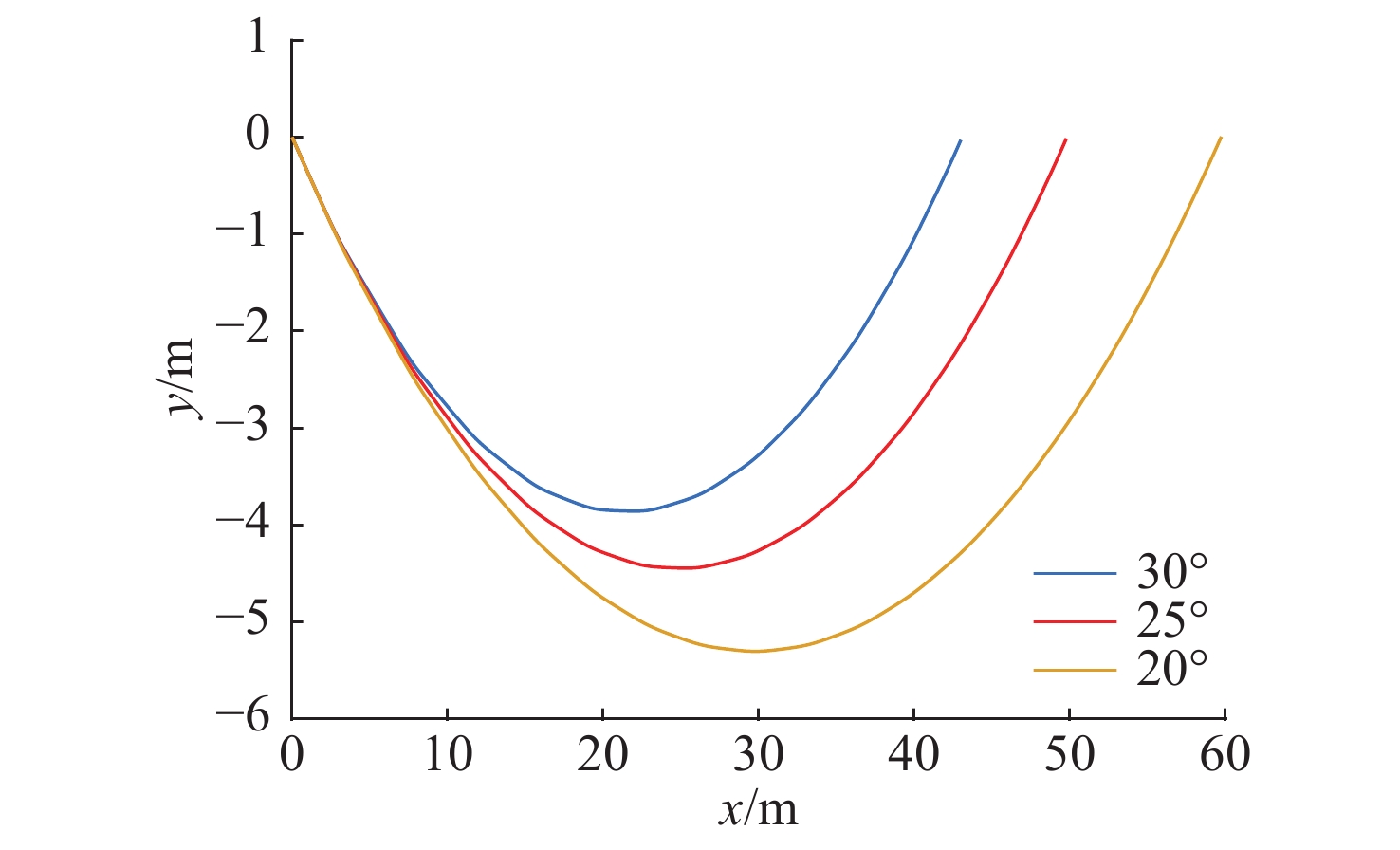
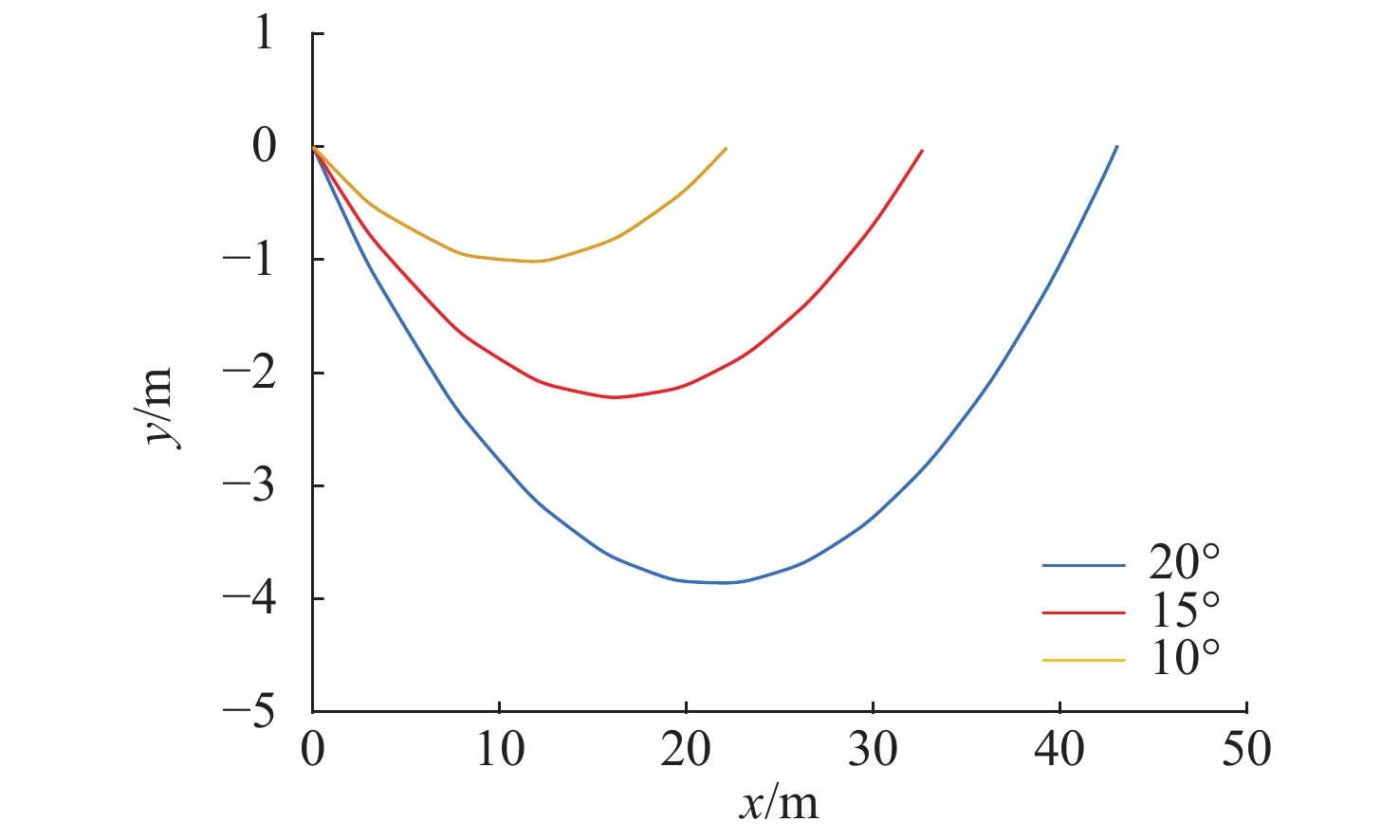
图 18 不同初始角度下航行器纵向弹道变化曲线
Figure 18. Curves of longitudinal trajectory of the vehicle at different initial pitch angles
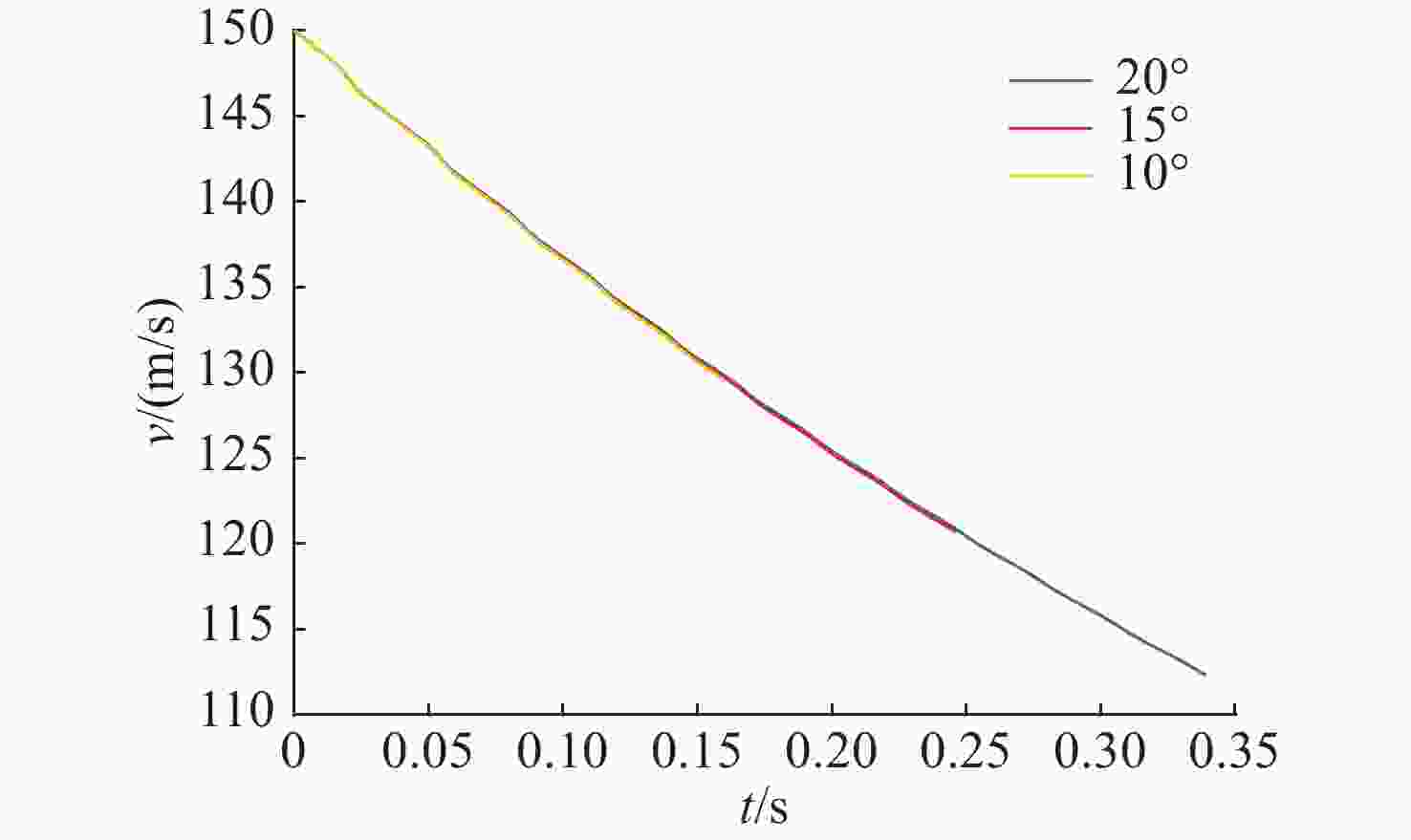
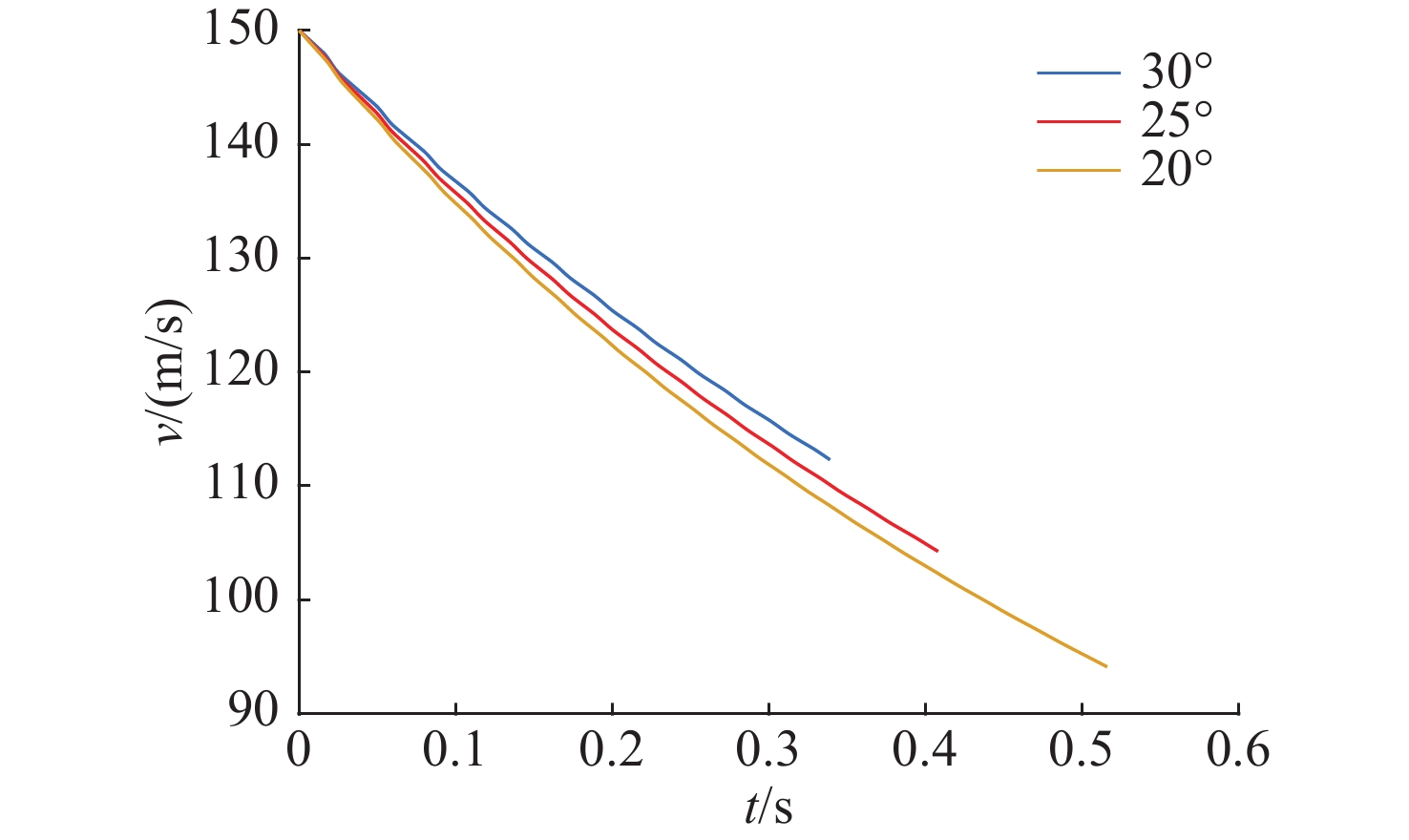
图 19 不同初始角度下航行器速度变化曲线
Figure 19. Curves of velocity of the vehicle at different initial pitch angles
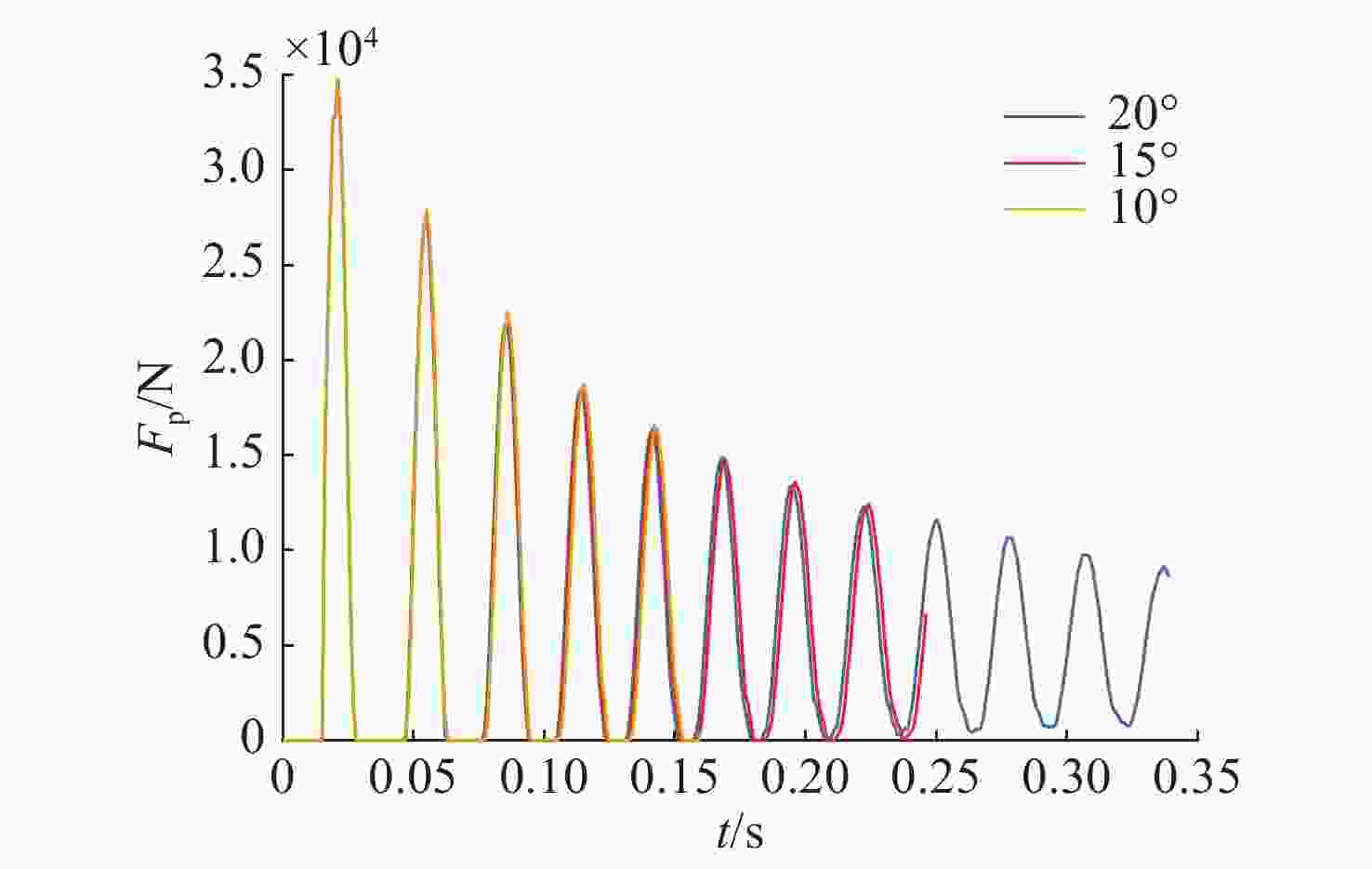
图 21 不同初始角度下航行器尾拍力变化曲线
Figure 21. Curves of planing force of the vehicle at different initial pitch angles
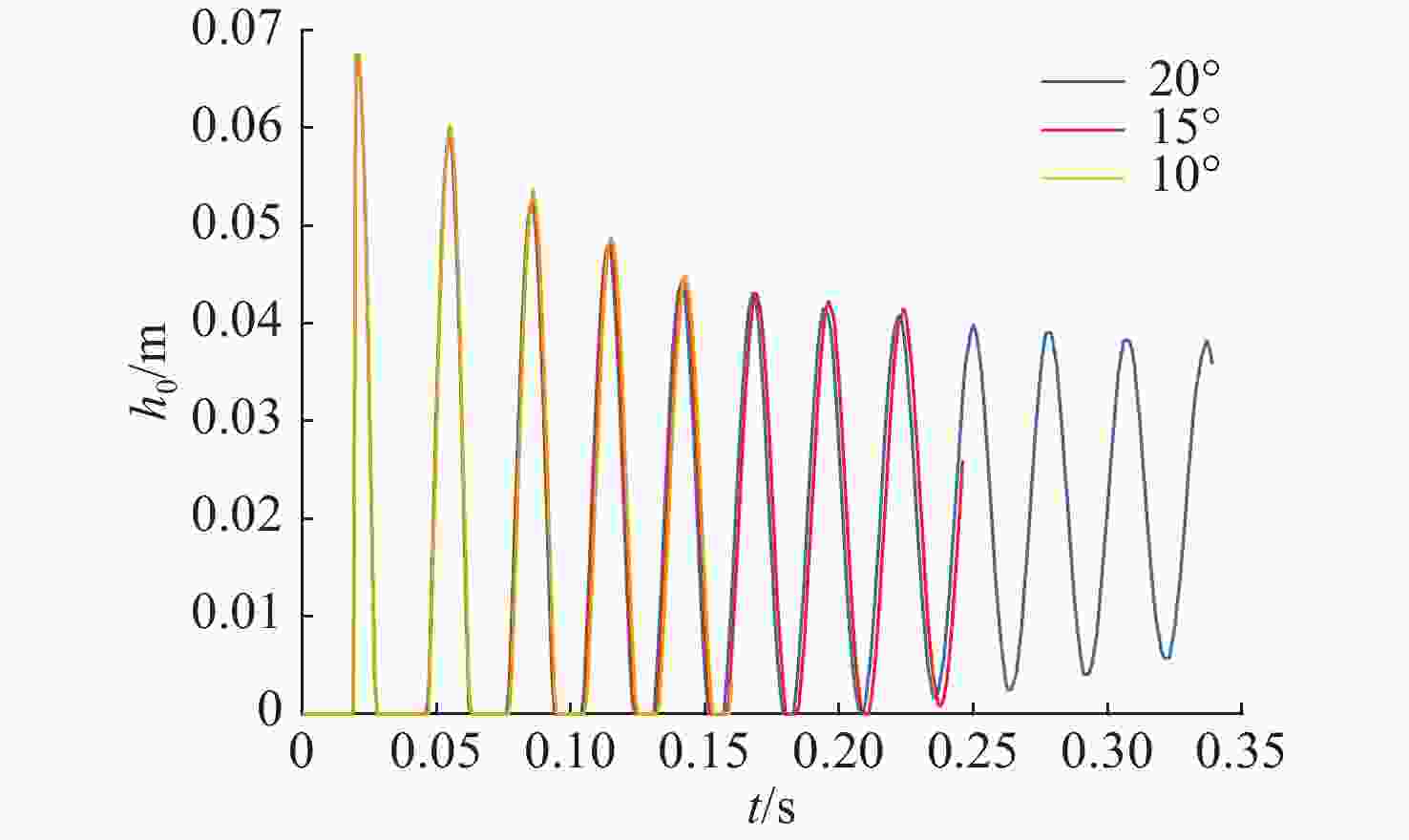
图 22 不同初始角度下航行器浸没深度变化曲线
Figure 22. Curves of immerse height of the vehicle at different initial pitch angles
-
[1] Semenenko V N, Naumova Y I. Study of the supercavitating body dynamics[M]. Berlin: Springer Berlin Heidelberg, 2012. [2] Kirschner, Ivan N, Kring D C, et al. Control strate-gies for supercavitating vehicles[J]. Journal of Vibration and Control, 2002, 8(2): 219-242. doi: 10.1177/107754602023818 [3] Kulkarni S S, Pratap R. Studies on the dynamics of a supercavitating projectile[J]. Applied Mathematical Modeling, 2000, 24(2): 113-129. doi: 10.1016/S0307-904X(99)00028-1 [4] Nguyen V, Hassouneh M A, Balachandran B, et al. Non-Steady planing and advection delay effects on the dynamics and control of supercavitating vehicles[C]//ASME 2011 International Mechanical Engineering Congress and Exposition. Denver, CO, USA: ASME, 2011: 775-781. [5] 刘立栋, 张宇文, 蔡帆. 超空泡射弹弹道特性影响因素仿真研究[J]. 计算机工程与应用, 2012, 48(32): 244-248. doi: 10.3778/j.issn.1002-8331.1105-0131Liu Lidong, Zhang Yuwen, Cai Fan. Simulation and research on influencing factors of supercavitation projectile trajectory characteristic[J]. Computer Engineering and Applications, 2012, 48(32): 244-248. doi: 10.3778/j.issn.1002-8331.1105-0131 [6] 王茂励. 超空泡航行器的数学建模与控制方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2008. [7] 罗凯, 李代金, 党建军, 等. 考虑空泡延迟特性的超空泡航行器运动控制模型[J]. 交通运输工程学报, 2010, 10(3): 41-45. doi: 10.3969/j.issn.1671-1637.2010.03.007Luo Kai, Li Daijin, Dang Jianjun, et al. Motion control model of supercavitating vehicle considering time-delay effect of supercavitation[J]. Journal of Traffic and Transportation Engineering, 2010, 10(3): 41-45. doi: 10.3969/j.issn.1671-1637.2010.03.007 [8] 罗凯, 李代金, 秦侃, 等. 强机动超空泡水下航行器空间运动控制面布局[J]. 交通运输工程学报, 2010(4): 45-49.Luo Kai, Li Daijin, Qin Kan, et al. Hydrodynamic layout of strongly maneuvering underwater supercavitating vehicle[J]. Journal of Traffic and Transportation Engineering, 2010(4): 45-49. [9] 张梓晨, 荣思远, 王小刚, 等. 加速非定常影响下跨介质飞行器终端滑模控制[J]. 宇航学报, 2023, 44(11): 1716-1726. doi: 10.3873/j.issn.1000-1328.2023.11.009Zhang Zichen, Rong Siyuan, Wang Xiaogang, et al. Terminal sliding mode control of trans-media aircraft under the unsteady influence of the acceleration phase[J]. Journal of Astronautics, 2023, 44(11): 1716-1726. doi: 10.3873/j.issn.1000-1328.2023.11.009 [10] 李宏源, 吕凯, 陈迎亮, 等. 新型仿生水-空跨介质航行器结构设计[J]. 水下无人系统学报, 2022, 30(6): 726-732. doi: 10.11993/j.issn.2096-3920.2022-0024Li Hongyuan, Lü Kai, Chen Yingliang, et al. Structure design of a novel bionic water-air cross-domain vehicle[J]. Journal of Unmanned Undersea Systems, 2022, 30(6): 726-732. doi: 10.11993/j.issn.2096-3920.2022-0024 [11] Guo Z T, Zhang W, Wang C. Experimental and theoretical study on the high-speed horizontal water entry behaviors of cylindrical projectiles[J]. Journal of Hydrodynamics, 2012, 24(2): 217-225.Guo Z T, Zhang W, Wang C. Experimental and theoretical study on the high-speed horizontal water entry behaviors of cylindrical projectiles[J]. Journal of Hydrodynamics, 2012, 24(2): 217-225. [12] 黄闯. 跨声速超空泡射弹的弹道特性研究[D]. 西安: 西北工业大学, 2017. [13] 邹望. 基于Logvinovich原理的通气超空泡理论及其数值研究[D]. 哈尔滨: 哈尔滨工业大学, 2013. [14] Logvinovich G V, Buyvol V N, Dudko N S. Free boundary flows[M]. Kiev: Naukova Dumka Publishing House, 1969. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 640
- HTML全文浏览量: 276
- PDF下载量: 118
- 被引次数: 0