

Cooperative Countermeasure Strategy of Sea-Air Cross-Domain Unmanned Platforms for Saturation Attack of Suicide UAVs
-
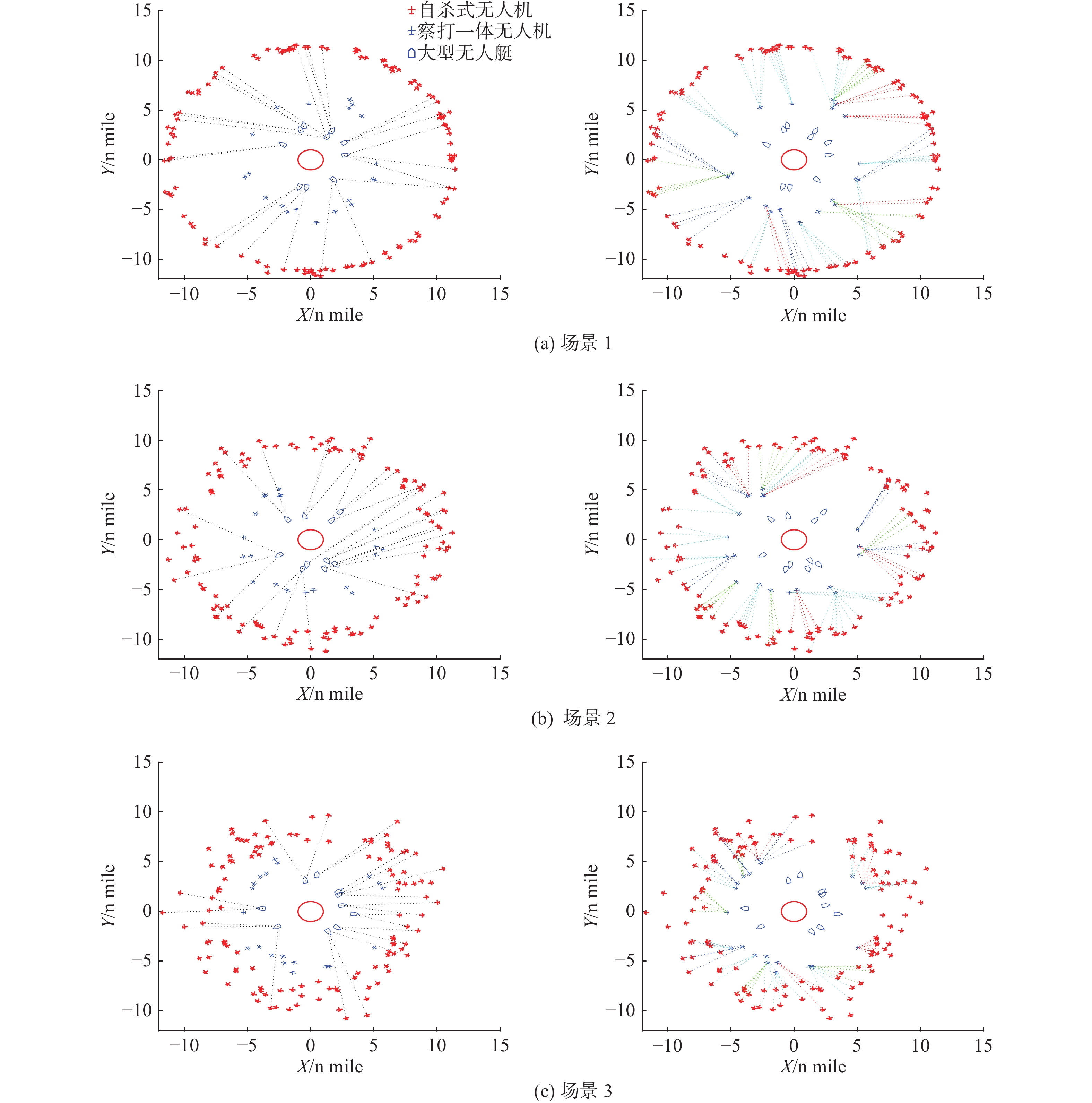
摘要: 针对海洋环境下反制自杀式无人机饱和攻击问题, 文中研究了目标数量远超我方情况下的海空跨域无人平台协同反制策略, 提出一种结合改进的遗传算法与联盟形成博弈的协同算法。首先根据海空跨域无人平台攻击特性与运动特性, 结合最大最小策略设计代价函数; 然后结合任务需求对遗传算法进行改进, 对交叉和变异过程进行引导和限制, 在提升遗传算法效率的基础上生成可行的反制方案; 最后设计联盟形成规则, 通过联盟之间的成员变动使各联盟达到纳什稳定状态, 在算子数量较多的情况下仍能使反制方案被持续稳定优化。仿真对比实验表明所提策略具有可行性和优越性, 能在目标遭受饱和攻击时提供合理高效的反制方案, 可为大规模跨域无人集群作战研究提供参考。Abstract: In view of saturation attacks of anti-suicide unmanned aerial vehicles(UAVs) in the marine environment, this paper studied the cooperative countermeasure strategy of sea-air cross-domain unmanned platforms under the condition that the number of targets far exceeded ours and proposed a cooperative algorithm combining improved genetic algorithm and coalition formation game. Firstly, according to the attack and motion characteristics of the sea-air cross-domain unmanned platform, the cost function was designed by combining the maximum and minimum strategies. Then, the genetic algorithm was improved according to the task requirements, and the crossover and mutation processes were guided and restricted. A feasible countermeasure scheme was generated by improving the efficiency of the genetic algorithm. Finally, the coalition formation rules were designed, and the coalitions reached Nash stability via changing members between the coalitions. The countermeasure scheme could still be continuously and stably optimized for many operators. The simulation comparison experiments show that the proposed strategy is feasible and superior and can provide a reasonable and efficient countermeasure scheme when the target is subjected to a saturation attack. This can provide a reference for research on large-scale cross-domain unmanned swarm combat.
-
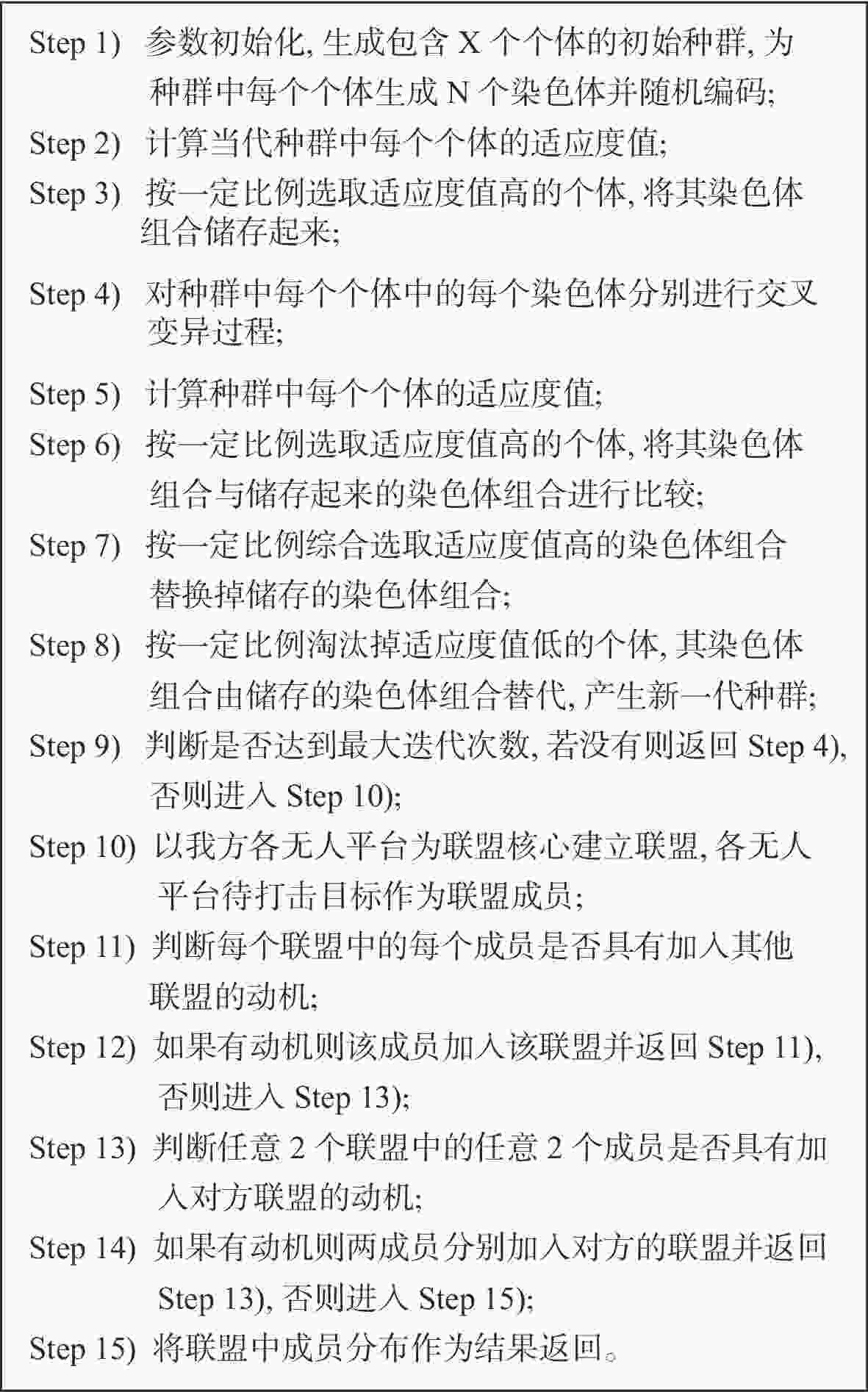
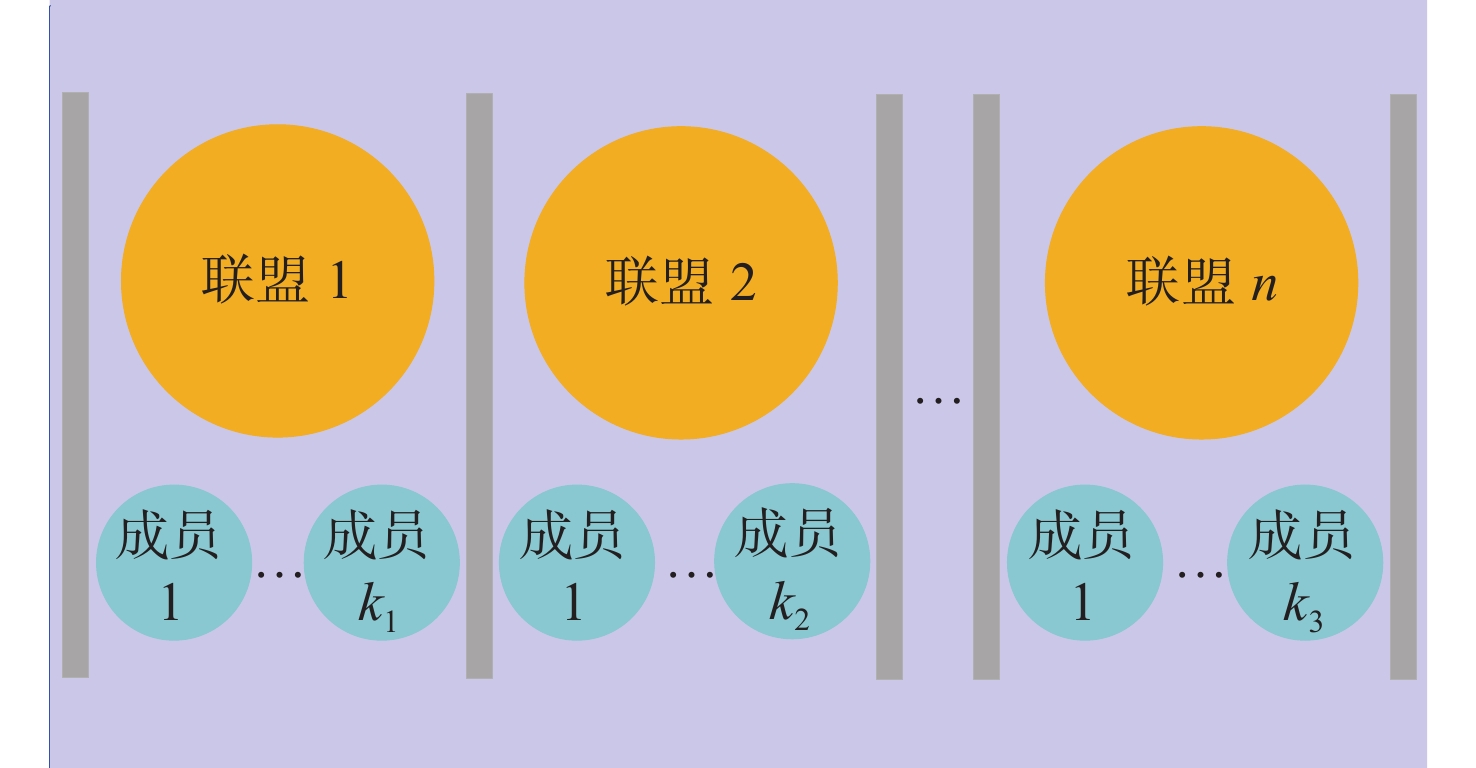
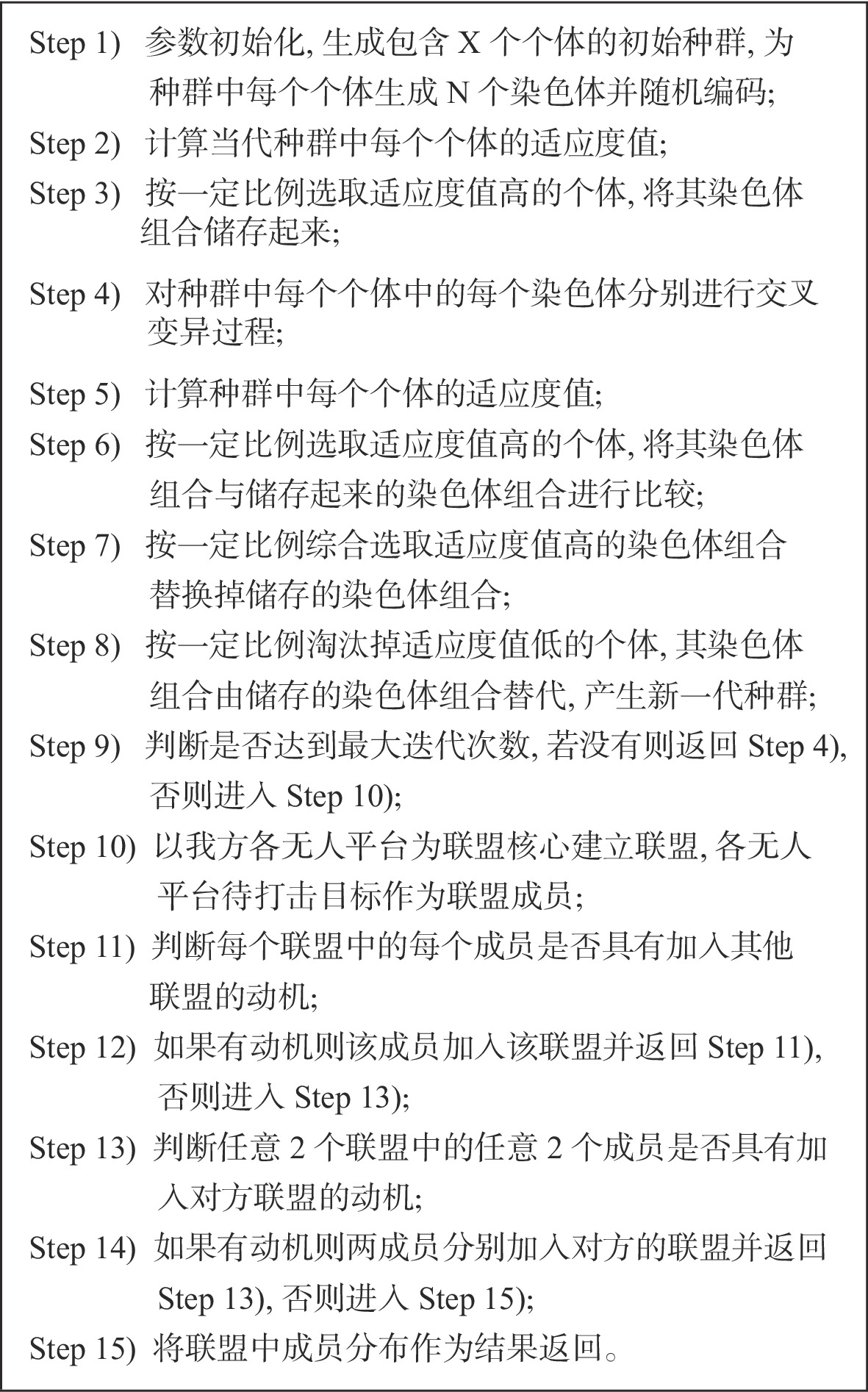
图 3 结合改进遗传算法与联盟形成博弈的协同反制方法流程
Figure 3. Flow chart of CFG-IGA collaborative counter-measures method
表 1 仿真环境设置
Table 1. Simulation environment setting
参数 数值 仿真区域 25 n mile×25 n mile 自杀式无人机
机动性能1(A型)、1.2(B型)、1.4(C型)、1.6(D型) 自杀式无人机
防御能力5(A型)、7(B型)、9(C型)、11(D型) 察打一体无人机
机动性能3(E型)、4(F型) 察打一体无人机
攻击能力2(E型)、4(F型) 大型无人艇载弹量 2(G型)、3(H型)  下载: 导出CSV
下载: 导出CSV
-
[1] 陈士涛, 李大喜, 孙鹏, 等. 美军智能无人机集群作战样式及影响分析[J]. 中国电子科学研究院学报, 2021, 16(11): 1113-1118. doi: 10.3969/j.issn.1673-5692.2021.11.006Chen Shitao, Li Daxi, Sun Peng, et al. Analysis on the development and influence of intelligent unmanned aerial vehicle cluster in U.S. army[J]. Journal of CAEIT, 2021, 16(11): 1113-1118. doi: 10.3969/j.issn.1673-5692.2021.11.006 [2] Jordan J. The future of unmanned combat aerial vehicles: An analysis using the three horizons framework[J]. Futures, 2021, 134: 102848. doi: 10.1016/j.futures.2021.102848 [3] Kiick D M. Unmanned vehicle mission-level autonomy applications to the littoral combat ship[J]. Johns Hopkins APL Technical Digest, 2012, 31(2): 175-178. [4] 唐俊林, 张栋, 王孟阳, 等. 改进链式多种群遗传算法的防空火力任务分配[J]. 哈尔滨工业大学学报, 2022, 54(6): 19-27. doi: 10.11918/202101056Tang Junlin, Zhang Dong, Wang Mengyang, et al. Air defense firepower task assignment based on improved chainlike multi-population genetic algorithm[J]. Journal of Harbin Institute of Technology, 2022, 54(6): 19-27. doi: 10.11918/202101056 [5] Hua X, Wang Z, Yao H J, et al. Research on many-to-many target assignment for unmanned aerial vehicle swarm in three-dimensional scenarios[J]. Computers and Electrical Engineering, 2021, 91: 107067. doi: 10.1016/j.compeleceng.2021.107067 [6] 常雪凝, 石建迈, 陈超, 等. 基于匈牙利-模拟退火算法的多阶段武器目标分配方法[J]. 系统工程与电子技术, 2023, 45(11): 3516-3523.Chang Xuening, Shi Jianmai, Chen Chao, et al. Multi-stage weapon target assignment method based on the integrating of Hungarian and simulated annealing algorithms[J]. Systems Engineering and Electronics, 2023, 45(11): 3516-3523. [7] Ramirez-Atencia C, Camacho D. Constrained multi-objective optimization for multi-UAV planning[J]. Journal of Ambient Intelligence and Humanized Computing, 2019, 10(6): 2467-2484. doi: 10.1007/s12652-018-0930-0 [8] Ye F, Chen J, Tian Y, et al. Cooperative task assignment of a heterogeneous multi-UAV system using an adaptive genetic algorithm[J]. Electronics, 2020, 9(4): 687. doi: 10.3390/electronics9040687 [9] Liao W, Wei X H, Lai J Z. Minmax fuzzy deterministic policy gradient for zero-sum differential game: Take pursuit-evasion problem as example[J]. Journal of Intelligent & Fuzzy Systems, 2021, 41(1): 1069-1082. [10] Tanuja L A, Kanth R J. Multi labeled imbalanced data classification based on advanced min-max machine learning[J]. International Journal of Innovative Technology and Exploring Engineering, 2019, 9(1): 1776-1778. doi: 10.35940/ijitee.L3718.119119 [11] 马金慧, 杨玉, 李存华, 等. 基于交叉熵-遗传算法的武器目标分配问题研究[J]. 南京师范大学学报(工程技术版), 2021, 41(1): 68-74.Ma Jinhui, Yang Yu, Li Cunhua, et al. Research on weapon target assignment problem based on cross entropy-genetic algorithm[J]. Journal of Nanjing Normal University(Engineering and Technology Edition), 2021, 41(1): 68-74. [12] 王庆贺, 万刚, 柴峥, 等. 基于改进遗传算法的多机协同多目标分配方法[J]. 计算机应用研究, 2018, 35(9): 2597-2601. doi: 10.3969/j.issn.1001-3695.2018.09.008Wang Qinghe, Wan Gang, Chai Zheng, et al. Multiple targets assignment of multiple UAVs’ cooperation based on improved genetic algorithm[J]. Application Research of Computers, 2018, 35(9): 2597-2601. doi: 10.3969/j.issn.1001-3695.2018.09.008 [13] 郑士源. 合作博弈理论的研究进展——联盟的形成机制及稳定性研究综述[J]. 上海海事大学学报, 2011, 32(4): 53-59. doi: 10.3969/j.issn.1672-9498.2011.04.011Zheng Shiyuan. Advance study on cooperative game theory: Review on study of formation mechanism and stability of coalition[J]. Journal of Shanghai Maritime University, 2011, 32(4): 53-59. doi: 10.3969/j.issn.1672-9498.2011.04.011 [14] 陈侠, 赵明明, 徐光延. 基于合作联盟的多无人机对地攻防对抗策略[J]. 兵工自动化, 2014, 33(1): 49-55. doi: 10.7690/bgzdh.2014.01.015Chen Xia, Zhao Mingming, Xu Guangyan. Multiple UAV operation strategy attack-defense confrontation to ground based on cooperative alliance[J]. Ordnance Industry Automation, 2014, 33(1): 49-55. doi: 10.7690/bgzdh.2014.01.015 [15] Yang X M, Luo H, Sun Y, et al. Coalitional game-based cooperative computation offloading in MEC for reusable tasks[J]. IEEE Internet of Things Journal, 2021, 8(16): 12968-12982. doi: 10.1109/JIOT.2021.3064186 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 1729
- HTML全文浏览量: 365
- PDF下载量: 223
- 被引次数: 0

图(7) / 表(1)




