

ROV Path Planning of Hydropower Plants Based on Improved Hybrid Motion Sparrow Search Algorithm
-
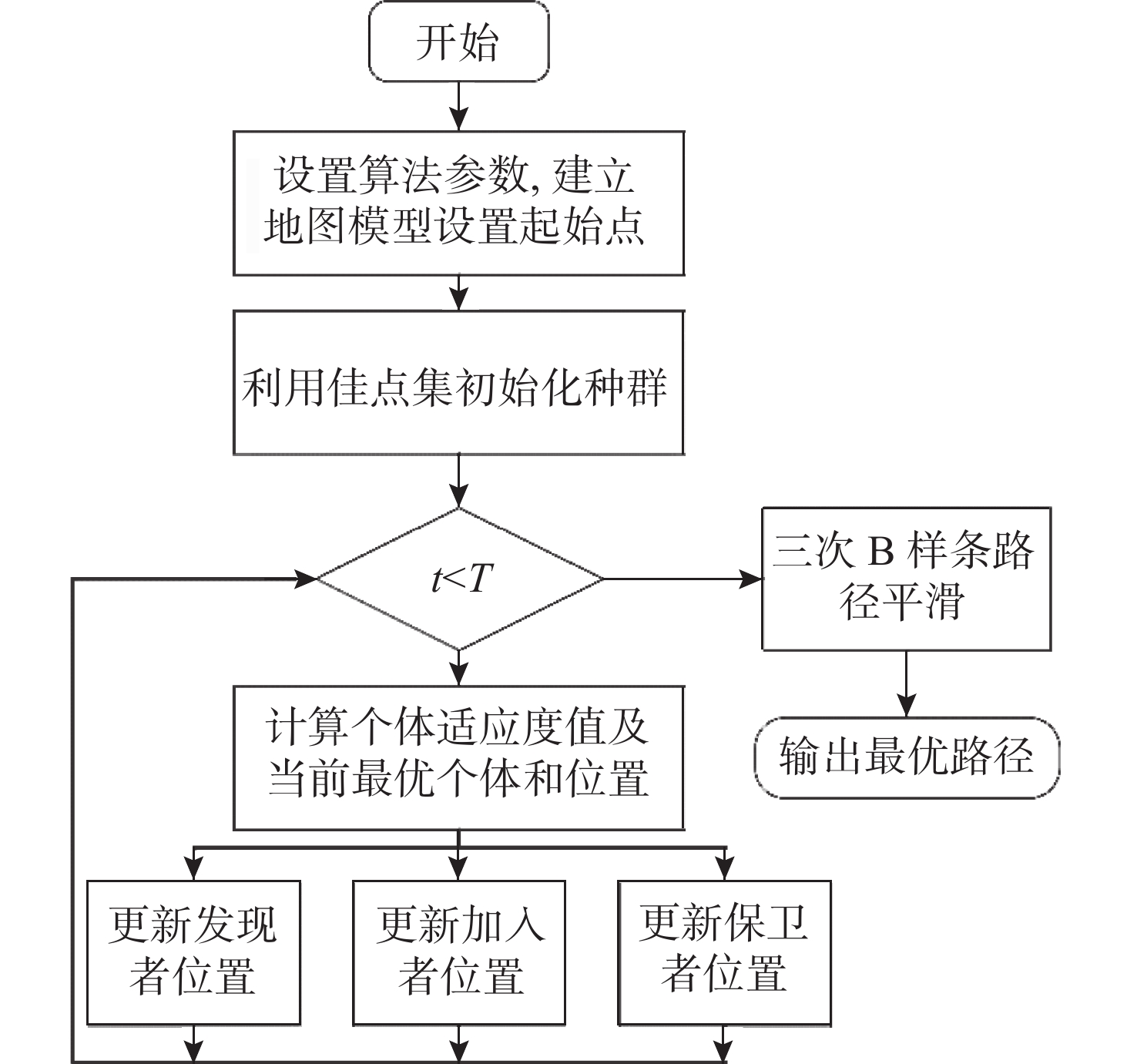
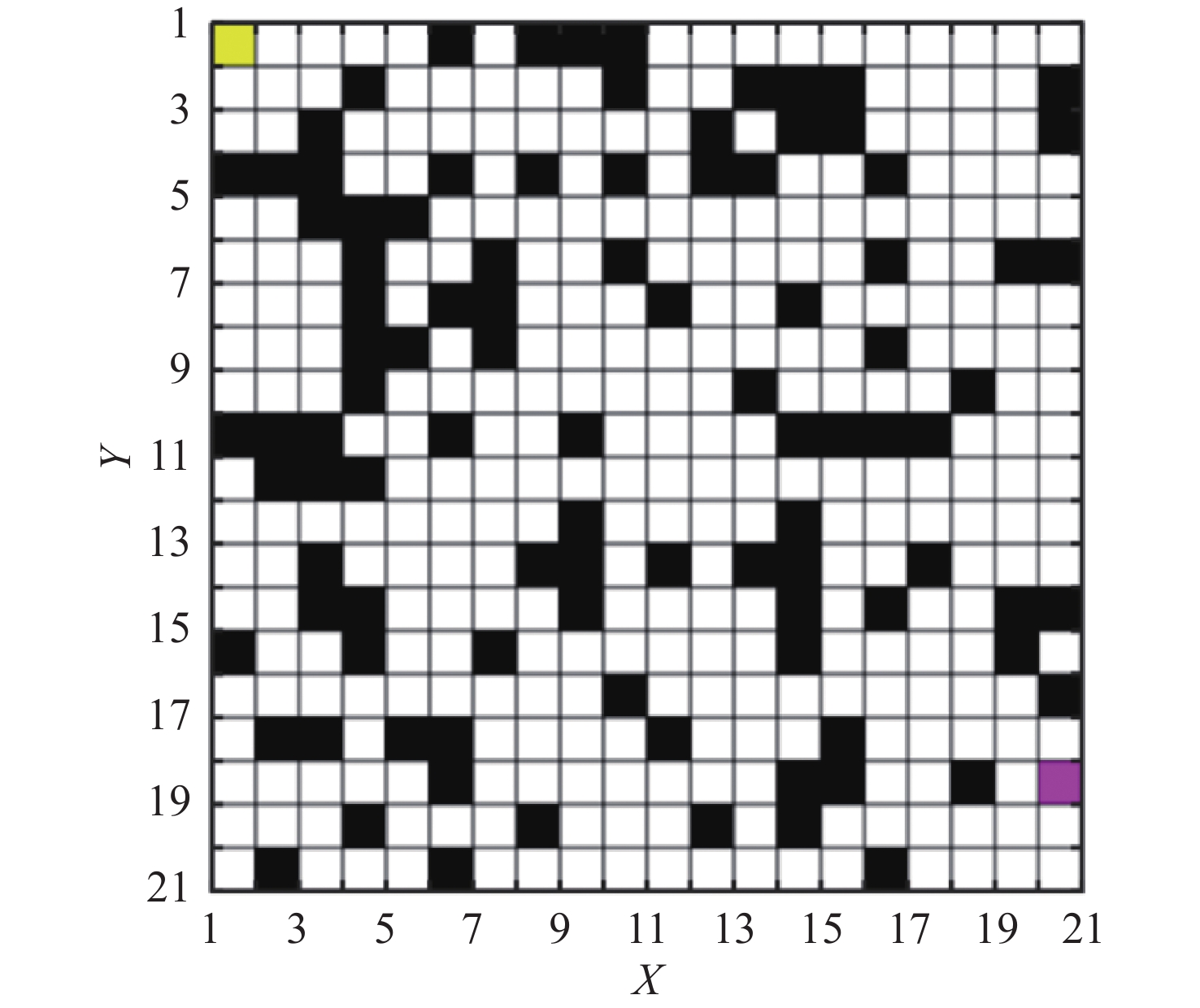
摘要: 水下遥控机器人(ROV)路径规划是水电站水下巡检作业的关键。针对电站水库下复杂环境及现有路径规划算法存在规划时间长、算法稳定性差、易陷入局部最优及生成路径不平滑等问题, 提出一种基于改进混合运动麻雀搜索算法的水电站ROV路径规划方法。首先, 引入佳点集改进麻雀种群初始化方法, 提高了种群多样性; 其次, 提出混合运动策略优化麻雀群体位置更新方式, 提高了算法收敛精度及稳定性; 然后, 结合工程实际问题, 考虑水库下水流速度大、强磁场、障碍物以及投入成本等因素,建立了包含时间成本、路径威胁、水流扰动和偏置函数的多元目标函数; 最后, 采用三次B样条插值得到最优光滑路径。仿真结果表明, 相较于其他路径规划算法, 所提方法在计算精度、收敛速度和稳定性方面表现更好, 适用于水电站水下巡检任务。Abstract: Path planning for underwater remotely operated vehicles(ROVs) is a prerequisite for underwater inspection operation of hydropower plants. The reservoir of hydropower plants has complex environments, and the existing path planning algorithms face the problems of long planning time, poor stability of algorithms, easy fall into the local optimum, and unsmooth path generation. In view of these issues, this paper put forward a ROV path planning method for hydropower plants based on the improved hybrid motion sparrow search algorithm. Firstly, the good point set was introduced to improve the sparrow population initialization method, which enhanced the population diversity; secondly, the hybrid motion strategy was proposed to optimize the sparrow population position updating method, increasing the algorithm’s convergence accuracy and stability; then, the multivariate objective function, which contained time cost, path threat, current disturbance, and penalty function, was established by combining with the actual engineering problems and considering the factors of large flow velocity of reservoirs, strong magnetic field, obstacles, and cost; finally, the triple B-spline interpolation was used to obtain the optimal smooth path. The simulation results show that compared with other path planning algorithms, the proposed method performs better in terms of computational accuracy, convergence speed, and stability, and it is suitable for underwater inspection tasks of hydropower plants.
-
Key words:
- remotely operated vehicle /
- path planning /
- sparrow search algorithm
-

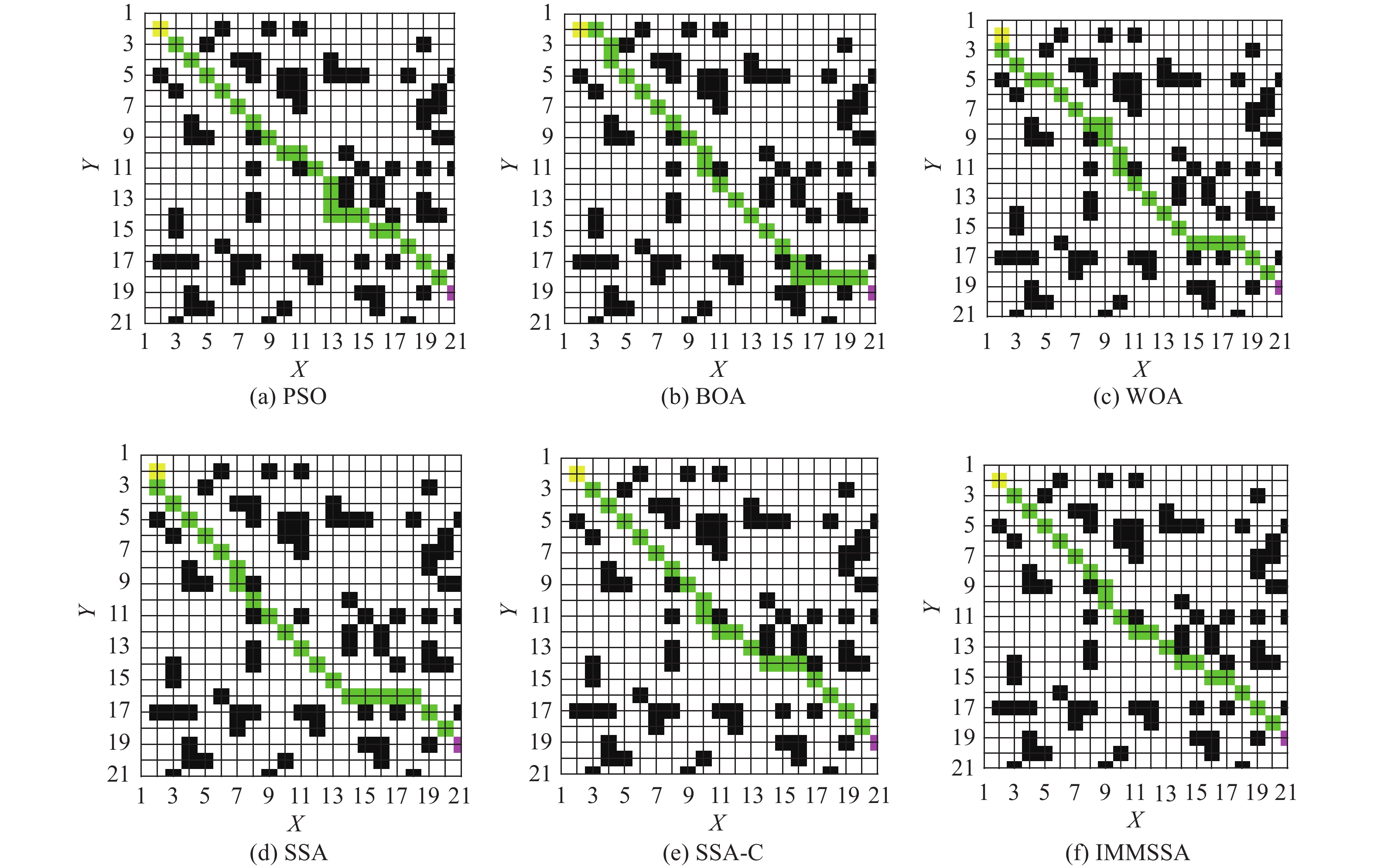
图 4 不同仿真算法下ROV路径规划结果对比
Figure 4. Results of ROV path planing under different simulation algorithms
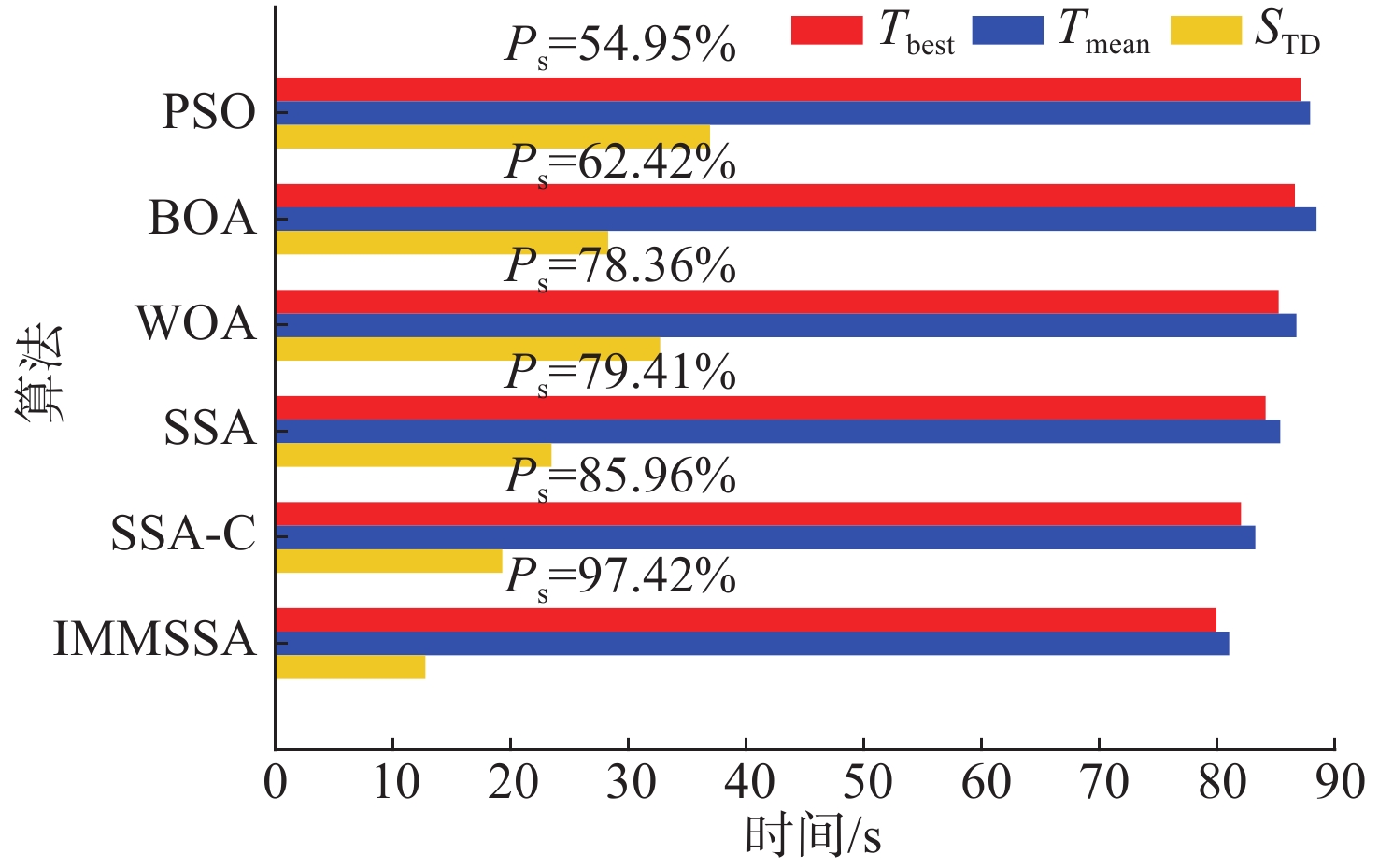
表 1 不同算法实验性能对比
Table 1. Experimental performance comparsion of different algorithms
算法 Tbest/s Tmean/s STD/s Ps/% Tsingle/s PSO 87.09 87.91 36.91 54.95 11.25 BOA 86.59 88.45 28.27 62.42 9.87 WOA 85.24 86.74 32.69 78.36 10.32 SSA 84.12 85.37 23.45 79.41 8.57 SSA-C 82.04 83.25 19.27 85.96 8.24 IMMSSA 79.94 81.02 12.74 97.42 8.06  下载: 导出CSV
下载: 导出CSV
-
[1] 苏畅, 谢宝丰, 程科林, 等. 水电站水下建筑物受冲磨蚀破坏修复方案研究与实践[J]. 广东水利水电, 2021(5): 17-22.Su Chang, Xie Baofeng, Cheng Kelin, et al. Research and practice on repairing scheme of underwater buildings damaged by erosion and erosion in hydropower station[J]. Guangdong Water Resources and Hydropower, 2021(5): 17-22. [2] 井国庆, 卜俊杰, 蔡加付. 基础设施的水下机器人检测应用与展望[J]. 水利技术监督, 2023(7): 18-20, 81.Jing Guoqing, Pu Junjie, Cai Jiafu. Underwater robotic inspection of infrastructure applications and perspectives[J]. Technical Supervision in Water Resources, 2023(7): 18-20, 81. [3] 修皓天. 基于Dijkstra算法的拉萨市旅游公共交通线路规划[J]. 中国新技术新产品, 2023(10): 137-139.Xiu Haotian. Tourist public transportation route planning for Lhasa city based on Dijkstra’s algorithm[J]. New Technology & New Products of China, 2023(10): 137-139. [4] 郭超, 陈香玲, 郭鹏, 等. 基于时空A*算法的多AGV无冲突路径规划[J]. 计算机系统应用, 2023, 31(10): 137-139.Guo Chao, Chen Xiangling, Guo Peng, et al. Multi-AGV non-conflict path planning based on space-time A* algorithm[J]. Computer Systems & Applications, 2023, 31(10): 137-139. [5] 李钧泽, 孙咏, 焦艳菲, 等. 基于改进人工势场的AGV路径规划算法[J]. 计算机系统应用, 2022, 31(3): 269-274.Li Junze, Sun Yong, Jiao Yanfei, et al. AGV path planning algorithm based on improved artificial potential field[J]. Computer Systems & Applications, 2022, 31(3): 269-274. [6] 徐小小, 周启银, 席艳艳, 等. 基于改进RRT算法的路径规划[J]. 中国科技信息, 2023(17): 124-127.Xu Xiaoxiao, Zhou Qiyin, Xi Yanyan, et al. Path planning based on improved RRT algorithm[J]. China Science and Technology Information, 2023(17): 124-127. [7] 程泽新, 李东生, 高杨. 一种改进遗传算法的无人机航迹规划[J]. 计算机仿真, 2019, 36(12): 31-35.Cheng Zexin, Li Dongsheng, Gao Yang. GASA drone path planning to improve mutation strategy[J]. Computer Simulation, 2019, 36(12): 31-35. [8] 唐文倩, 徐海芹, 刘洋. 基于改进PSO混合算法的无人机三维路径规划研究[J]. 青岛大学学报(自然科学版), 2023, 36(3): 57-63.Tang Wenqian, Xu Haiqin, Liu Yang. Research on 3D path planning of UAV based on improved PSO hybrid algorithm[J]. Journal of Qingdao University(Natural Science Edition), 2023, 36(3): 57-63. [9] 钱平, 顾才东, 鲜学丰, 等. 基于改进蚁群算法的水下机器人路径规划研究[J]. 制造业自动化, 2022, 44(12): 181-184,208.Qian Ping, Gu Caidong, Xian Xuefeng, et al. Research on underwater robot path planning based on improved ant colony algorithm[J]. Manufacturing Automation, 2022, 44(12): 181-184,208. [10] 孙兵, 朱大奇, 杨元元. 基于粒子群优化的自治水下机器人模糊路径规划[J]. 高技术通讯, 2013, 23(12): 1284-1291.Sun Bing, Zhu Daqi, Yang Yuanyuan. Fuzzy path planning for autonomous underwater vehicles based on particle swarm optimization[J]. Chinese High Technology Letters, 2013, 23(12): 1284-1291. [11] 龙舰涵, 许湘扬. 基于改进萤火虫算法的无人机路径规划[J]. 计算机测量与控制, 2023, 31(5): 166-173.Long Jianhan, Xu Xiangyang. AUV path planning based on improved firefly algorithm[J]. Computer Measurement & Control, 2023, 31(5): 166-173. [12] 马小陆, 梅宏, 谭毅波, 等. 蝴蝶优化算法的移动机器人全局路径规划研究[J]. 机械科学与技术, 2023, 42(12): 2085-2092.Ma Xiaolu, Mei Hong, Tan Yibo, et al. Research of butterfly optimization algorithm of global path planning for mobile robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2023, 42(12): 2085-2092. [13] 赵俊涛, 罗小川, 刘俊秘. 改进鲸鱼优化算法在机器人路径规划中的应用[J]. 东北大学学报(自然科学版), 2023, 44(8): 1065-1071.Zhao Juntao, Luo Xiaochuan, Liu Junmi. Application of improved whale optimization algorithm in robot path planning[J]. Journal of Northeastern University(Natural Science), 2023, 44(8): 1065-1071. [14] 方泗喃, 高萍萍, 肜郝捷, 等. 基于改进天牛须搜索算法的路径规划方法[J]. 信息技术与信息化, 2021(11): 23-28.Fang Sinan, Gao Pingping, Tong Haojie, et al. A path planning method based on an improved tenkara whisker search algorithm[J]. Information Technology and Informatization, 2021(11): 23-28. [15] Xue J, Shen B. A novel swarm intelligence optimization approach: sparrow search algorithm[J]. Systems science & control engineering, 2020, 8(1): 22-34. [16] 汤安迪, 韩统, 徐登武, 等. 基于混沌麻雀搜索算法的无人机航迹规划方法[J]. 计算机应用, 2021, 41(7): 2128-2136.Tang Andi, Han Tong, Xu Dengwu, et al. Path planning method of unmanned aerial vehicle based on chaos sparrow search algorithm[J]. Journal of Computer Applications, 2021, 41(7): 2128-2136. [17] 宋立业, 胡朋举. 改进SSA在三维路径规划中的应用[J]. 传感器与微系统, 2022, 41(3): 158-160.Song Liye, Hu Pengju. Application of improved SSA in 3D path planning[J]. Transducer and Microsystem Technologies, 2022, 41(3): 158-160. [18] 程孟飞, 丁蕊. 基于佳点集遗传算法的多路径覆盖测试用例生成[J]. 计算机与数字工程, 2022, 50(9): 1940-1944.Cheng Mengfei, Ding Rui. Multi-path coverage test case generation based on improved good point set genetic algorithm[J]. Computer & Digital Engineering, 2022, 50(9): 1940-1944. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 582
- HTML全文浏览量: 271
- PDF下载量: 88
- 被引次数: 0

图(5) / 表(1)




