Research on Structural Principle and Hydrodynamic Performance of Double-Hull Hybrid Powered Underwater Glider
-
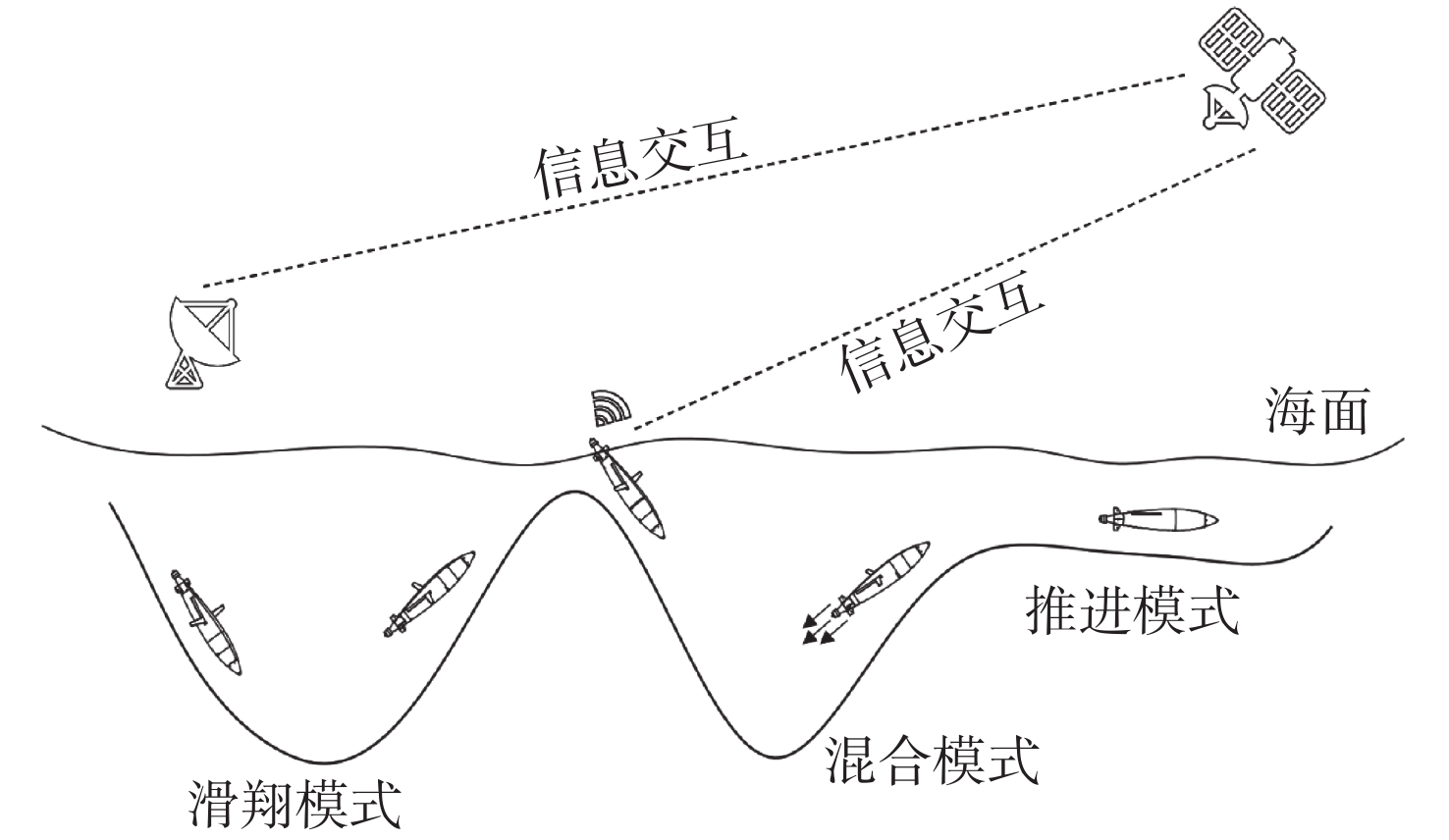
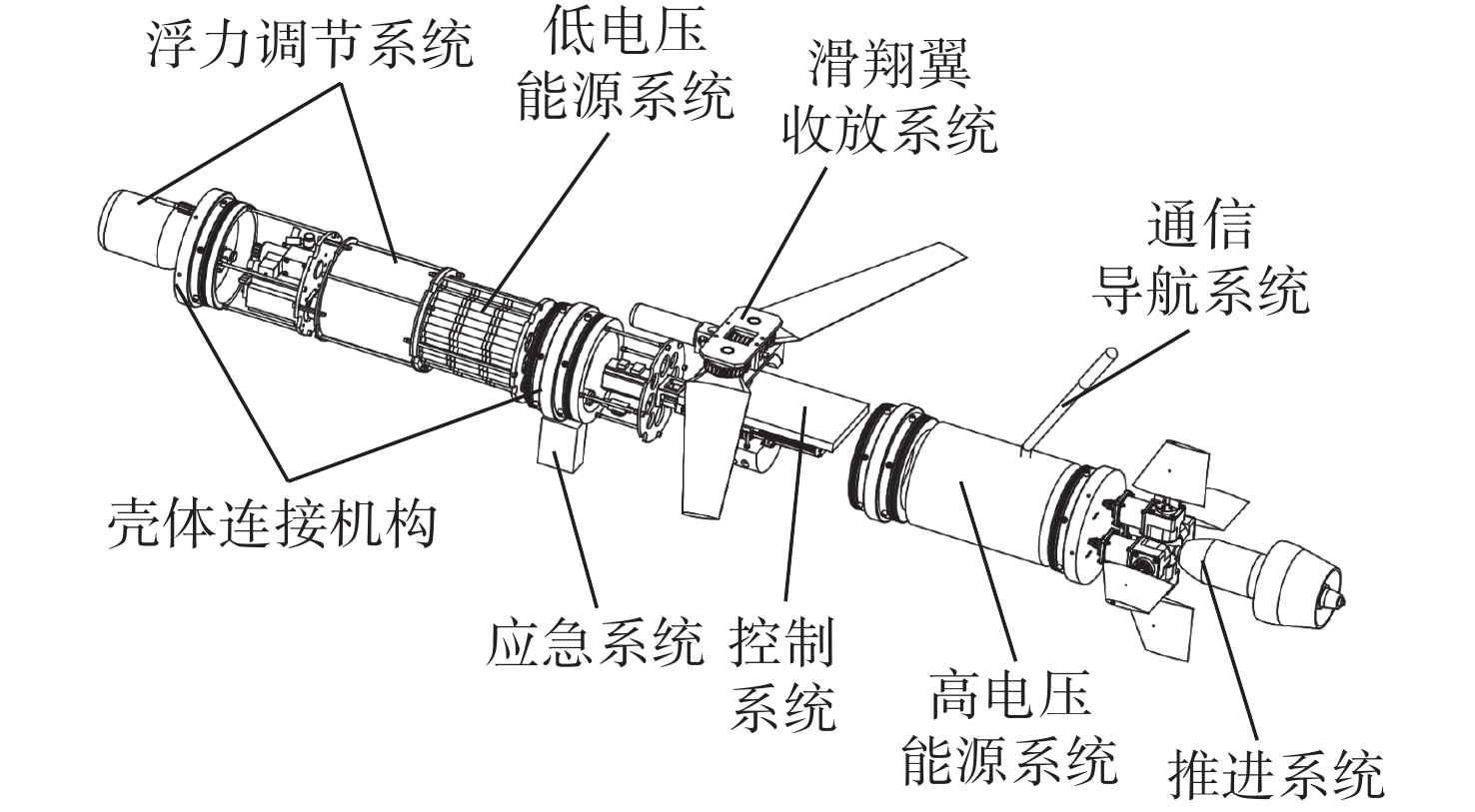
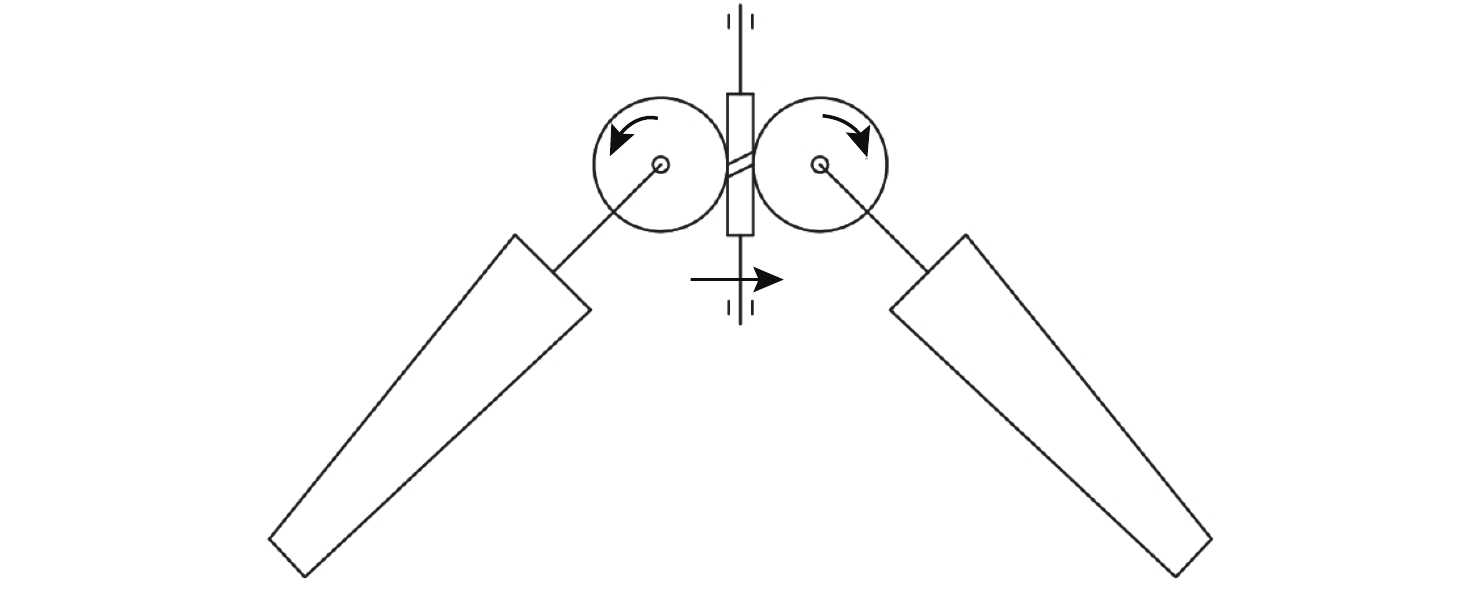
摘要: 混合驱动水下滑翔机虽兼具典型水下滑翔机及传统航行器的优点, 但存在能耗高、不利回收等缺点, 且在快速推进模式下, 滑翔翼的存在不仅会增加航行阻力, 降低航行稳定性, 也不利于滑翔机回收布放。针对此, 提出一种双壳体混合驱动水下滑翔机, 其滑翔翼与传统固定水平翼不同之处在于滑翔机可根据实际需求进行收放, 以实现对能源的合理分配, 从而提高水下滑翔机的综合航行性能。此外, 详细介绍了该滑翔机的工作模式、系统组成以及滑翔翼收放原理, 并设计了一种蜗轮蜗杆滑翔翼收放装置, 建立相应的收放机构技术方案, 在此基础上通过数值仿真方法进行了滑翔翼水动力性能分析, 得到了合理的机载配置方案。Abstract: Although the hybrid powered underwater glider has the advantages of both typical underwater gliders and traditional vehicles, it also has disadvantages such as high energy consumption and inconvenient recovery. In the rapid propulsion mode, the existence of wings not only increases navigation resistance and reduces navigation stability but also is not conducive to the recovery and deployment of gliders. In view of this, a dual-hull hybrid powered underwater glider was proposed. The wings of the glider can be retracted according to the actual needs, which is different from the traditional fixed horizontal wing, so as to realize the reasonable distribution of energy and improve the comprehensive navigation performance of underwater gliders. In addition, the working mode, system composition, and wing retracting principle of the glider were introduced in detail, and a worm gear and worm glide wings retracting device was designed. The corresponding retracting mechanism was established. On this basis, the hydrodynamic performance of the wings was analyzed by numerical simulation method, and a reasonable shipborne configuration scheme was obtained.
-
Key words:
- underwater glider /
- double-hull /
- hybrid powered /
- gliding wing /
- hydrodynamic performance
-
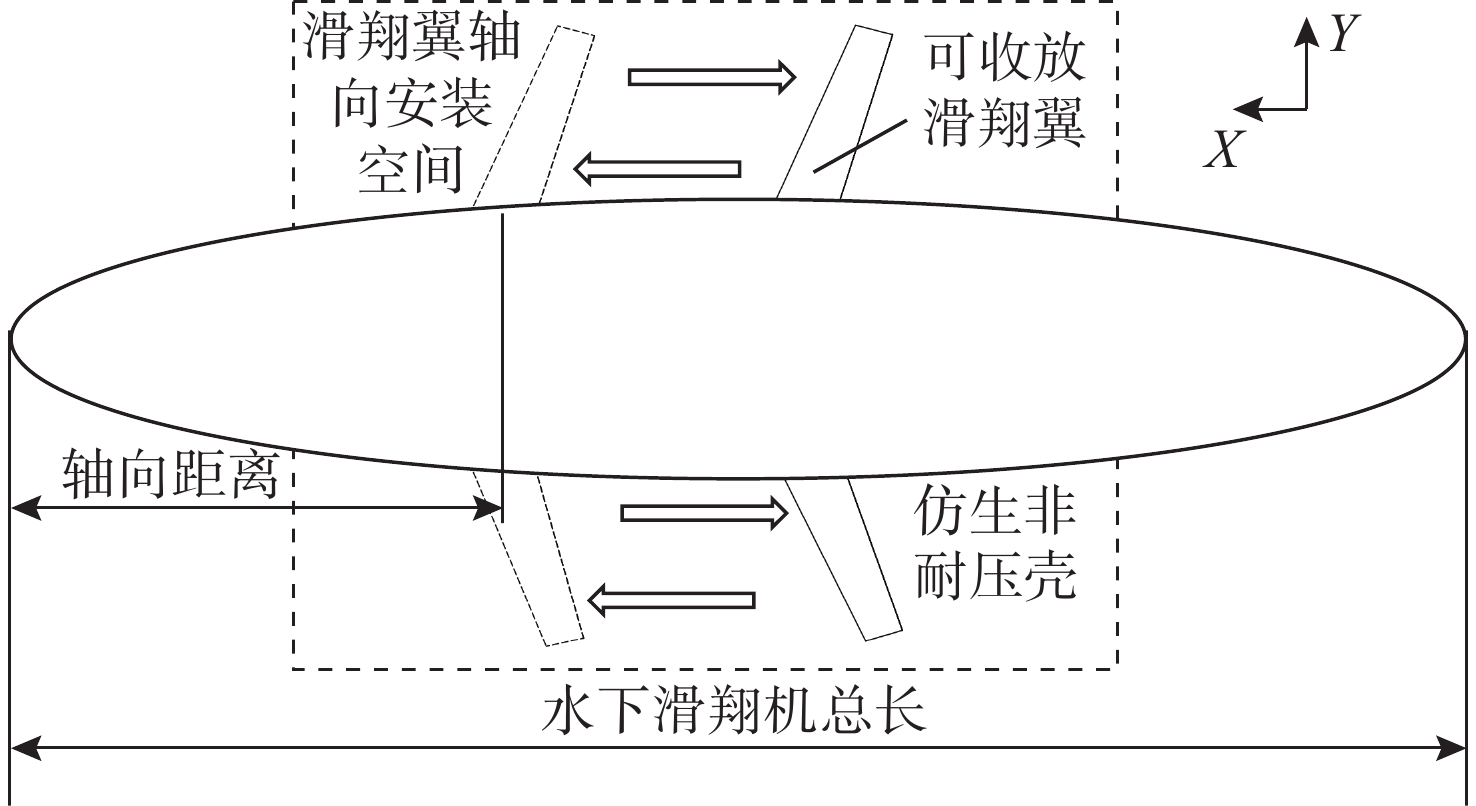
图 1 双壳体混合驱动水下滑翔机滑翔翼工作示意图
Figure 1. Working state of the double-hull hybrid powered underwater glider wings

图 2 双壳体混合驱动水下滑翔机工作流程示意图
Figure 2. Work flow of the double-hull hybrid powered underwater glider
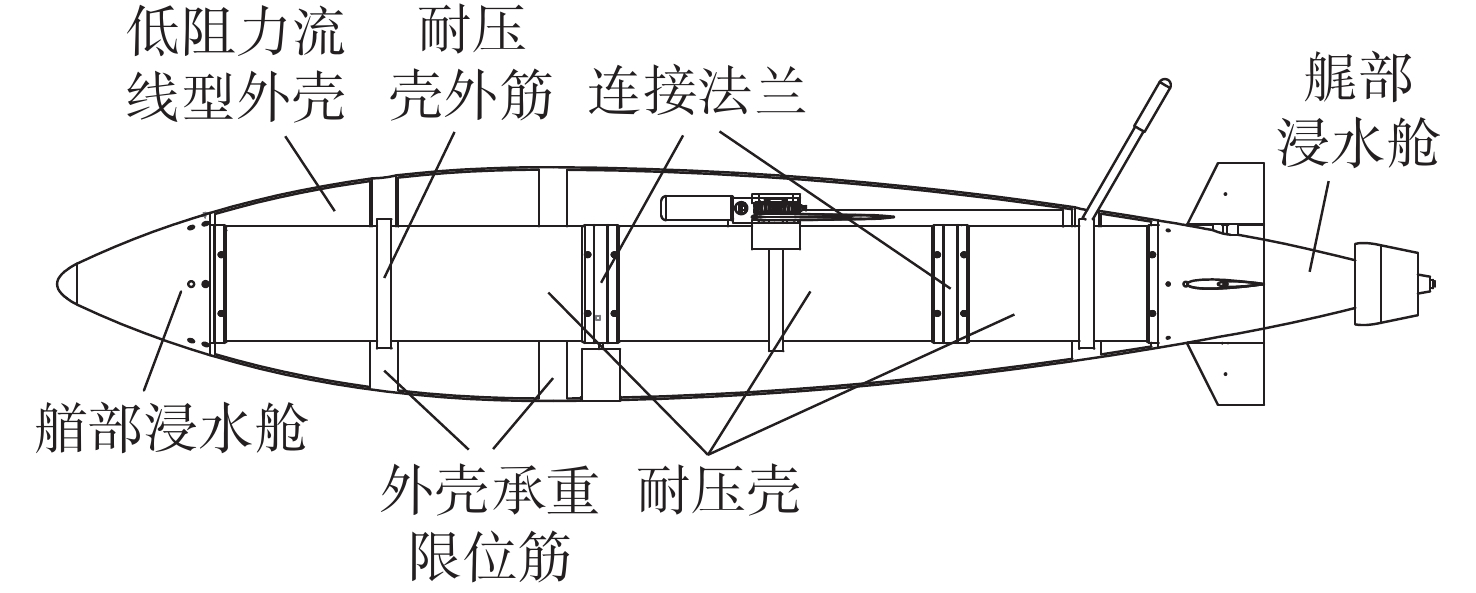
图 3 双壳体混合驱动水下滑翔机内外壳体连接示意图
Figure 3. The connection between the inner and outer shells of the double-hull hybrid powered glider
图 4 双壳体混合驱动水下滑翔机内部模块结构图
Figure 4. Internal module structure of the double-hull hybrid powered underwater glider
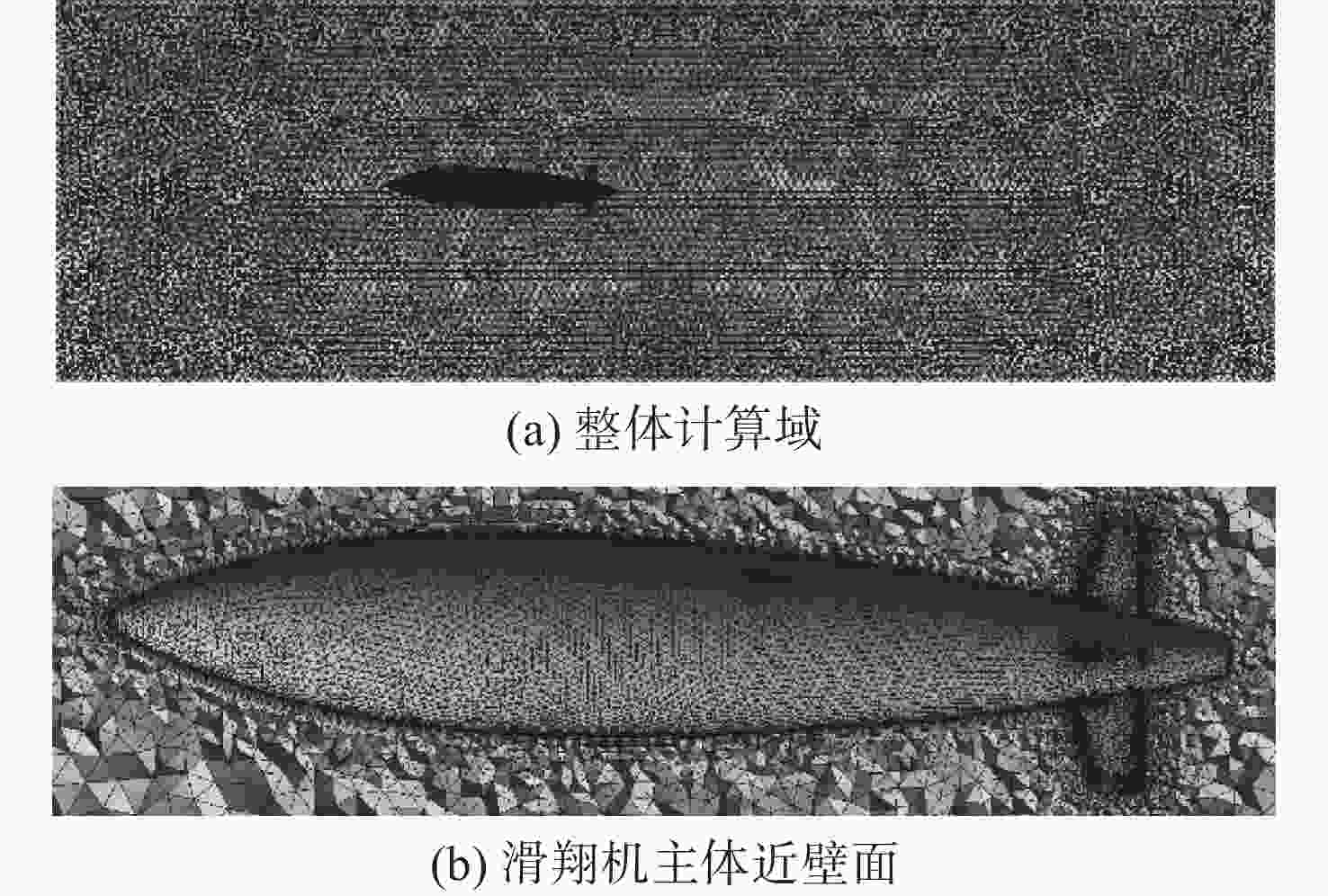
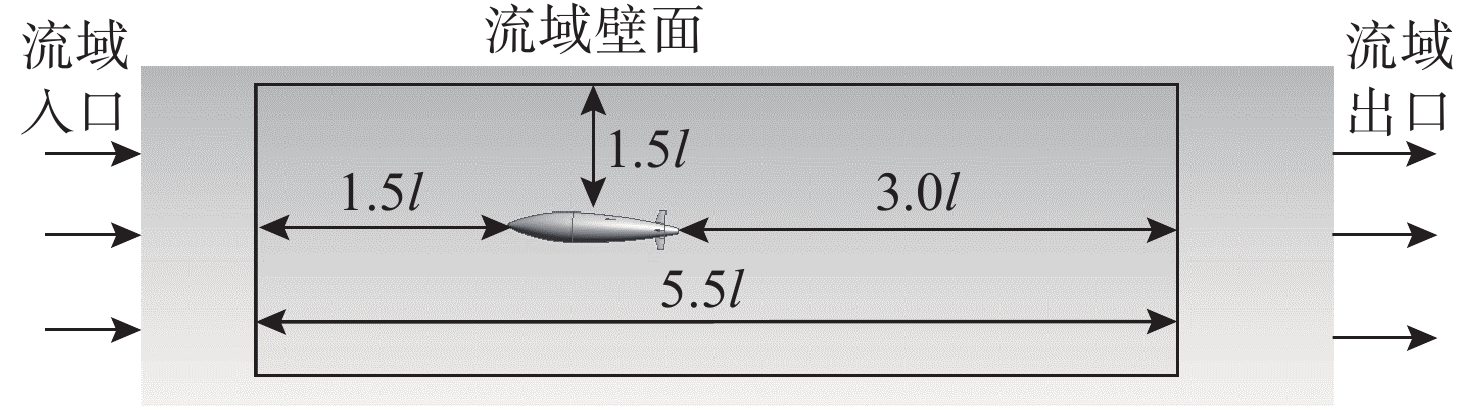
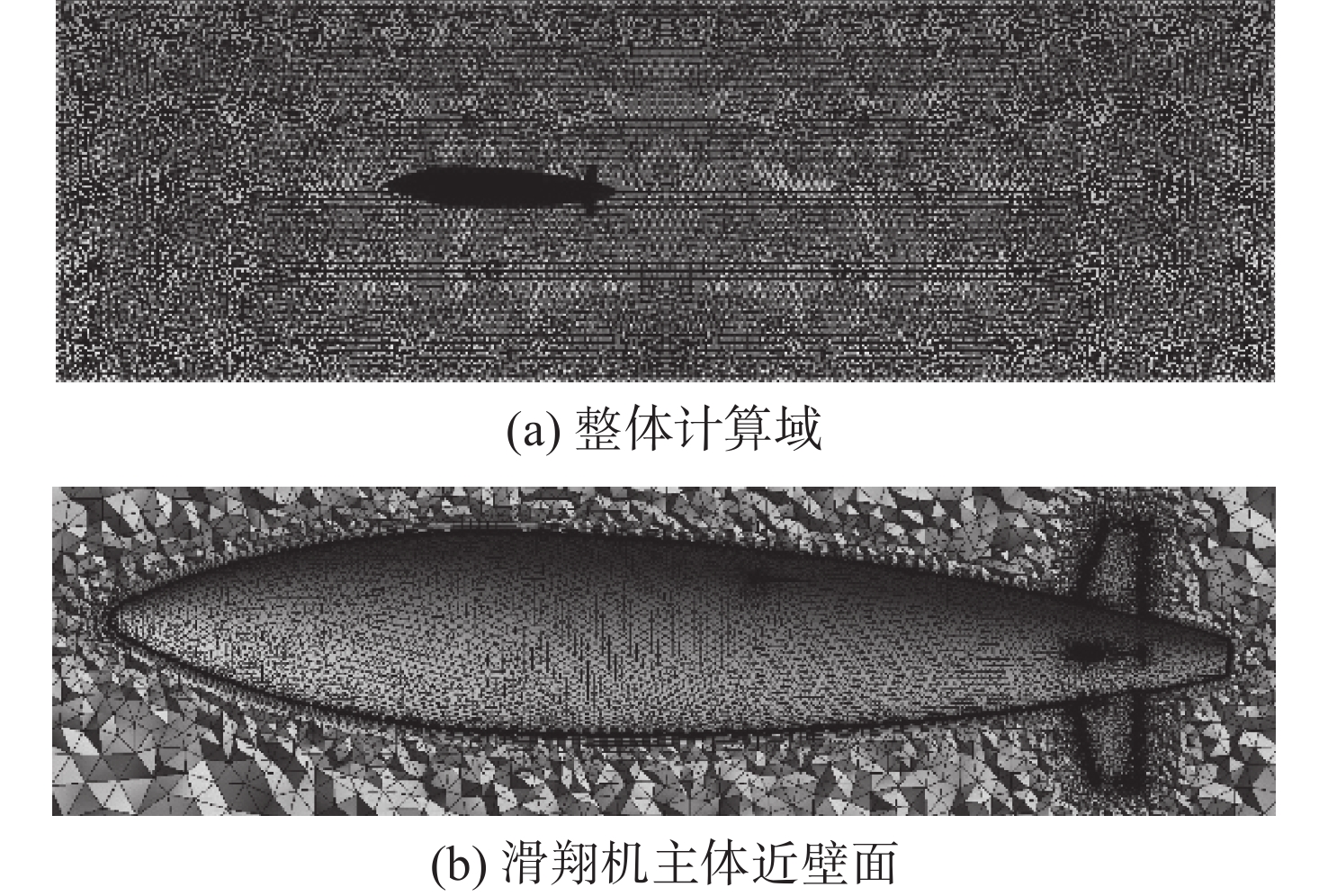
图 8 双壳体混合驱动水下滑翔机网格划分
Figure 8. Meshing of double-hull hybrid powered underwater glider
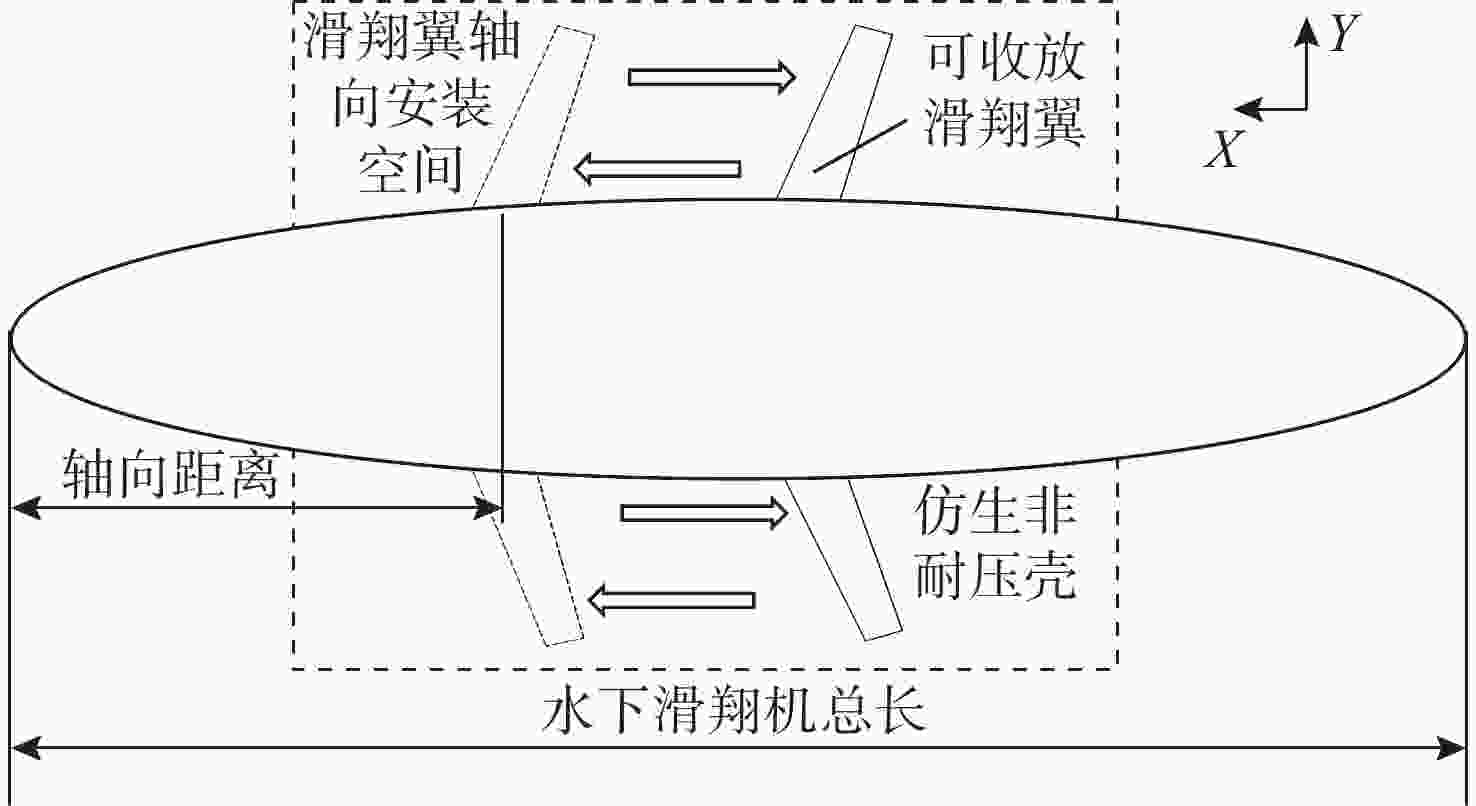
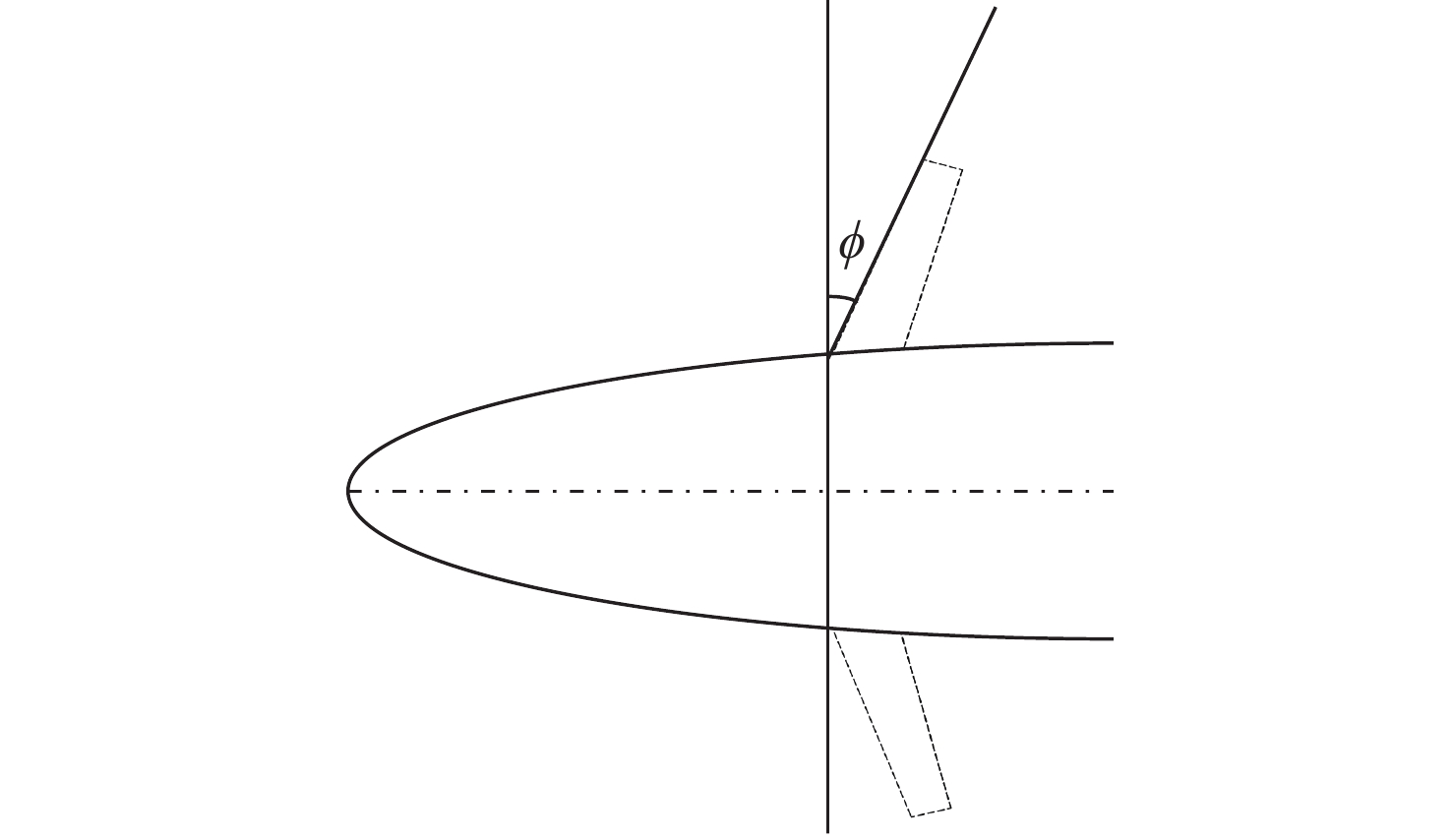
图 10 收放翼轴向布置相对位置示意图
Figure 10. Relative position of the axial arrangement of the retracting wings
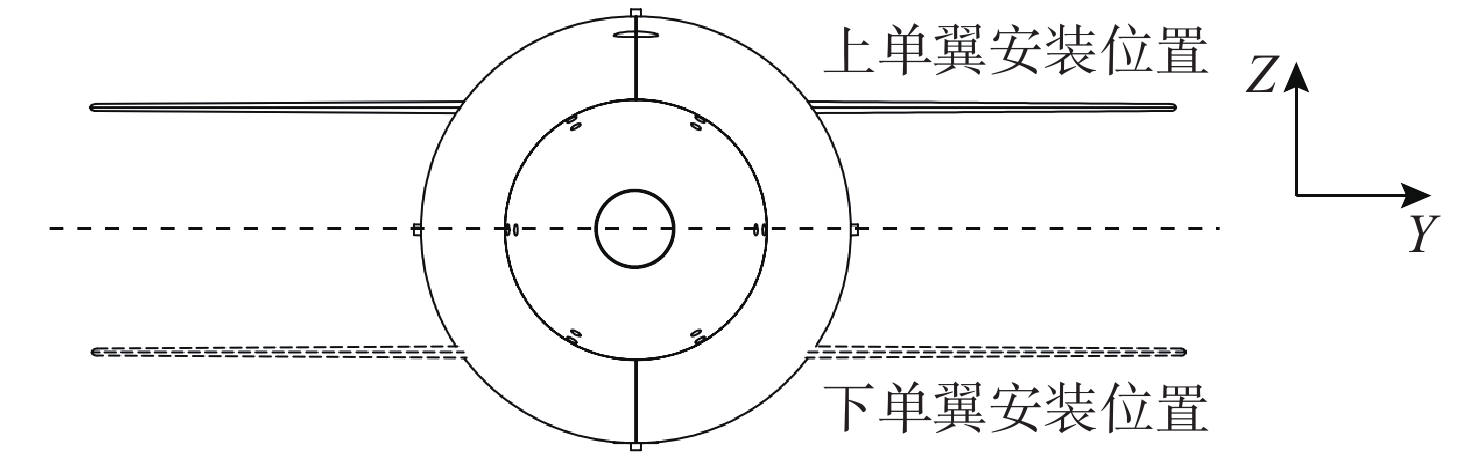
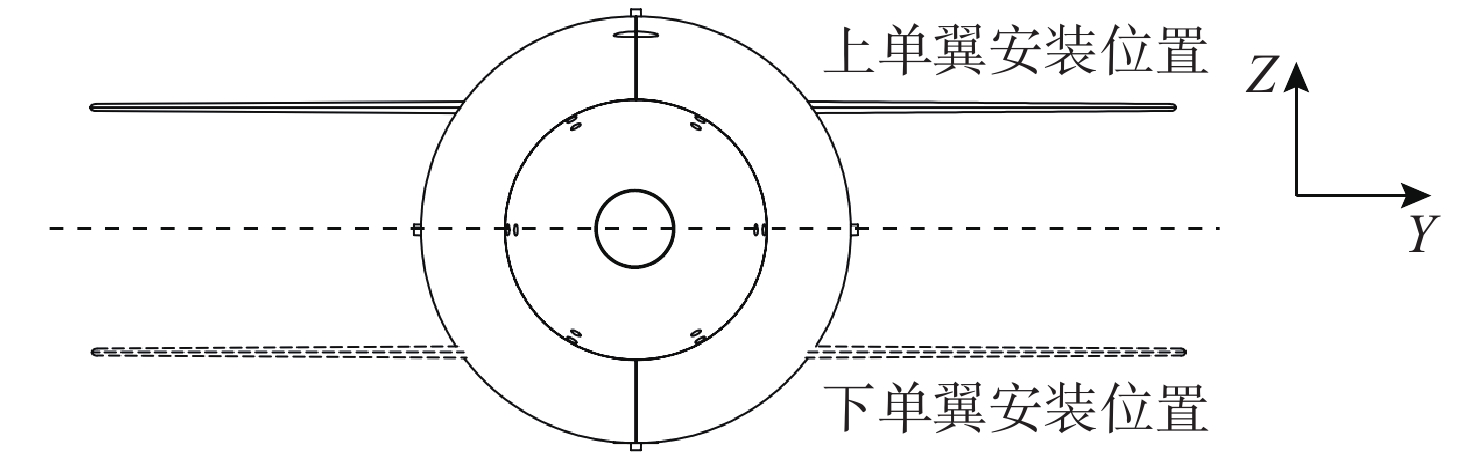
图 12 收放翼垂向布置相对位置示意图
Figure 12. Relative position of vertical arrangement of retracting wings
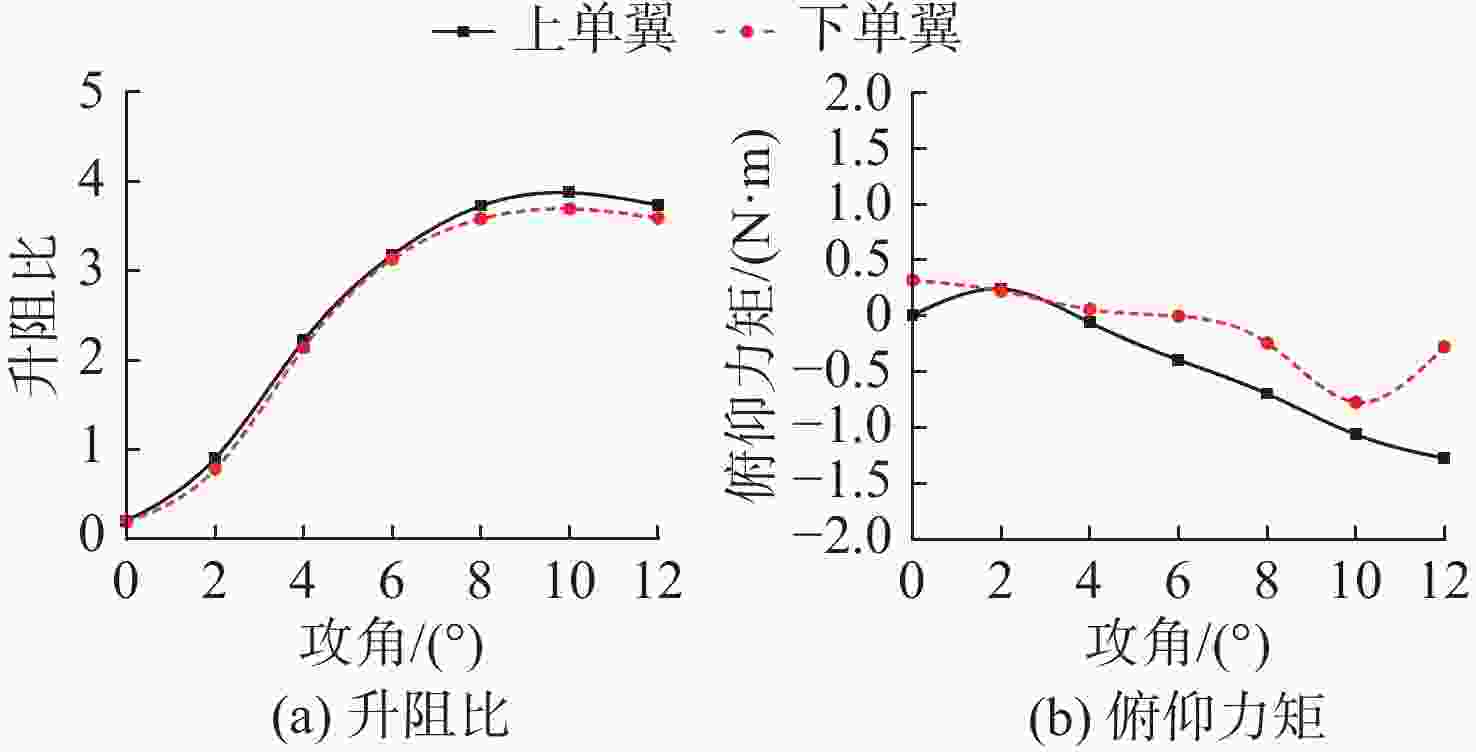
图 13 升阻比和俯仰力矩随垂向距离变化曲线
Figure 13. Lift-drag ratio and pitching moment varies with vertical distance
-
[1] 石晴晴, 牛文栋, 张润锋, 等. 水下滑翔机路径规划研究综述及展望[J]. 中国舰船研究, 2023, 18(1): 29-42, 51.Shi Qingqing, Niu Wendong, Zhang Runfeng, et al. Review and prospects of underwater glider path planning[J]. Chinese Journal of Ship Research, 2023, 18(1): 29-42, 51. [2] Wood S, Allen T, Kuhn S, et al. The development of an autonomous underwater powered glider for deep-sea biological, chemical and physical oceanography[C]//Oceans Europe 2007. Aberdeen, Scotland, UK: IEEE, 2007. [3] 吴尚尚, 李阁阁, 兰世泉, 等. 水下滑翔机导航技术发展现状与展望[J]. 水下无人系统学报, 2019, 27(5): 529-540.Wu Shangshang, Li Gege, Lan Shiquan, et al. Present situation and prospect of navigation technologies for underwater glider[J]. Journal of Unmanned Undersea Systems, 2019, 27(5): 529-540. [4] 刁宏伟, 李宗吉, 王世哲, 等. 水下滑翔机研究现状及发展趋势[J]. 舰船科学技术, 2022, 44(6): 8-12. doi: 10.3404/j.issn.1672-7649.2022.06.002Diao Hongwei, Li Zongji, Wang Shizhe, et al. The research status and development trend of underwater glider[J]. Ship Science and Technology, 2022, 44(6): 8-12. doi: 10.3404/j.issn.1672-7649.2022.06.002 [5] 方尔正, 周子凌, 桂晨阳. 水下滑翔机原理与应用[J]. 国防科技工业, 2020(8): 66-68. [6] Bachmayer R, Leonard N E, Graver J, et al. Underwater gliders: Recent developments and future applications [C]//International Symposium on Underwater Technology. Taipei: IEEE, 2004. [7] Jones C, Allsup B, DeCollibus C. Slocum glider: Expanding our understanding of the oceans[C]//Oceans 2014. St. John’s, NL, Canada: IEEE, 2014. [8] Claustre H, Beguery L, Patrice P L A. Sea Explorer glider breaks two world records multisensor UUV achieves global milestones for endurance, distance[J]. Sea Tech-nology, 2014, 55(3): 19-22. [9] 杨绍琼, 李元昊, 孙通帅, 等. “海燕”号谱系化水下滑翔机技术发展与应用[J]. 水下无人系统学报, 2023, 31(1): 68-85.Yang Shaoqiong, Li Yuanhao, Sun Tongshuai, et al. Development and application of Petrel serialized underwater glider technologies[J]. Journal of Unmanned Undersea Systems, 2023, 31(1): 68-85. [10] 沈新蕊, 王延辉, 杨绍琼, 等. 水下滑翔机技术发展现状与展望[J]. 水下无人系统学报, 2018, 26(2): 89-106.Shen Xinrui, Wang Yanhui, Yang Shaoqiong, et al. Development of underwater gliders: An overview and prospect[J]. Journal of Unmanned Undersea Systems, 2018, 26(2): 89-106. [11] 张建星. 喷水推进型深海滑翔机定深推进模式研究[D]. 武汉: 华中科技大学, 2018. [12] 张明明. 可变翼混合驱动水下滑翔机变体机翼系统研究[D]. 天津: 天津大学, 2017. [13] Wolf M I, Licht S C, Hover F, et al. Open loop swimming performance of “Finnegan” the biomimetic flapping foil AUV[C]//The Sixteenth International Offshore and Polar Engineering Conference. San Francisco, California: International Society of Offshore and Polar Engineers, 2006. [14] Arima M, Ichihashi N, Ikebuchi T. Motion characteristics of an underwater glider with independently controllable main wings[C]//In Oceans’08 MTS/IEEE Kobe-Techno-Ocean’08 -Voyage toward the Future. Kobe, Japan: IEEE, 2008. [15] Arima M, Ichihashi N, Miwa Y. Modelling and motion simulation of an underwater glider with independently controllable main wings[C]//In Oceans 2009-Europe (Oceans). Piscataway, USA: IEEE, 2009. [16] 杨志金. 可变翼混合驱动水下滑翔机变翼系统设计及航行性能研究[D]. 天津: 天津大学, 2014. [17] 武建国, 陈超英, 王树新, 等. 混合驱动水下滑翔器滑翔状态机翼水动力特性[J]. 天津大学学报, 2010, 43(1): 84-89. doi: 10.3969/j.issn.0493-2137.2010.01.014Wu Jianguo, Chen Chaoying, Wang Shuxin, et al. Hydrodynamic characteristics of the wings of hybrid-driven underwater glider in glide mode[J]. Journal of Tianjin University, 2010, 43(1): 84-89. doi: 10.3969/j.issn.0493-2137.2010.01.014 [18] 孙伟成, 宋大雷, 严志鹏, 等. 基于水动力参数设计的水下滑翔机横向静稳定性改善研究[J]. 舰船科学技术, 2021, 43(15): 68-76. doi: 10.3404/j.issn.1672-7649.2021.08.014Sun Weicheng, Song Dalei, Yan Zhipeng, et al. The improvement of lateral static stability for underwater glider based on hydrodynamic parameters[J]. Ship Science and Technology, 2021, 43(15): 68-76. doi: 10.3404/j.issn.1672-7649.2021.08.014 [19] 宋方希. 基于CFD的混合驱动水下航行器外形研究[D]. 天津: 天津大学, 2012. [20] 武建国. 混合驱动水下滑翔器系统设计与性能分析[D]. 天津: 天津大学, 2010. [21] 吴衍志. 基于可变形水动力外形的泵喷推进水下滑翔机附体结构优化研究[D]. 武汉: 华中科技大学, 2023. -

 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 1277
- HTML全文浏览量: 147
- PDF下载量: 102
- 被引次数: 0