Underwater Biomimetic Whisker Sensor Based on Liquid Metal and Triboelectric Nanogenerator
-
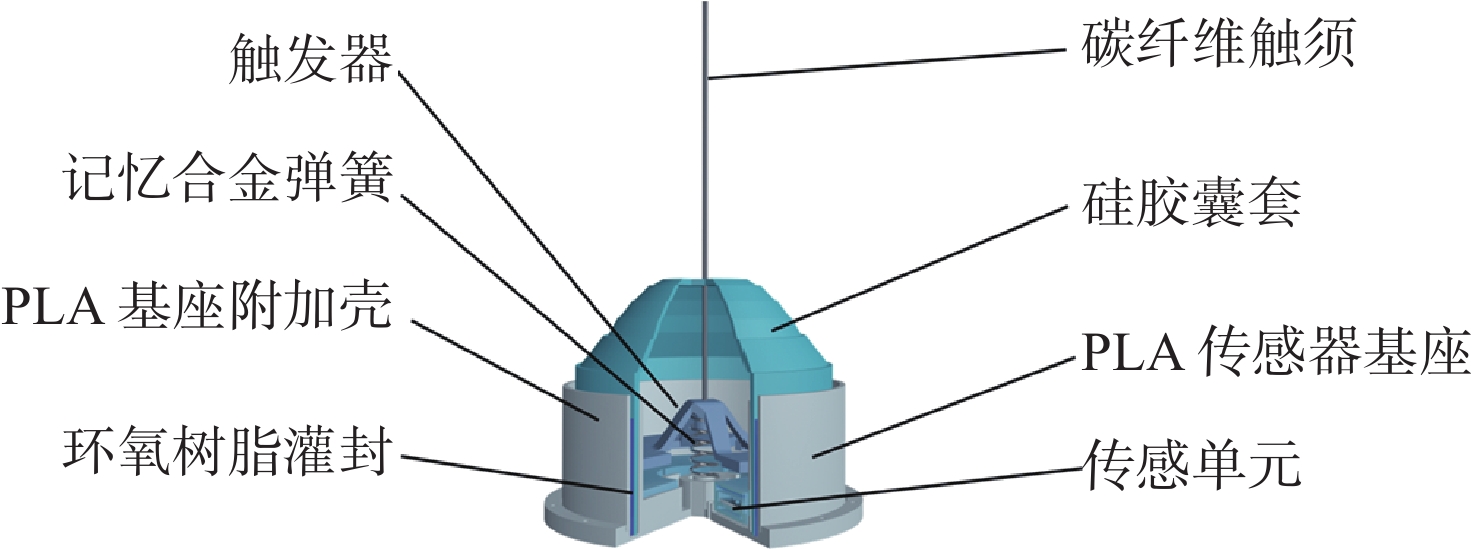
摘要: 为了提升水下机器人的机动性和适应性, 增强其感知周围环境的能力是必要的。受动物触须的毛囊结构启发, 文中将液态金属与摩擦纳米发电机相结合, 提出了一种基于液态金属的摩擦电触须传感器(LTWS), 在浑浊度高、视距低的水下环境中作为水下机器人光学与声学感知技术的补充, 提升水下机器人的信息感知能力。LTWS主要由碳纤维材料触须、硅胶囊套、触发器、记忆合金弹簧、传感单元及基座组成, 碳纤维触须的细微偏转会驱动触发器靠近并挤压对应方向的传感单元, 进而产生电信号。LTWS的感知信号与触须横向位移呈线性关系, 灵敏度可达7.9 mV/mm, 且触碰频率对输出信号的影响较小。LTWS丰富了水下机器人的感知手段, 为实现海洋信息感知提供了新的思路。Abstract: To enhance the maneuverability and adaptability of underwater robots, it is essential to improve their perception of the surrounding environment. Inspired by the hair follicle structure of animal whiskers, this paper proposed a liquid metal-based triboelectric whisker sensor(LTWS) by combining liquid metal with triboelectric nanogenerators. This sensor served as a supplement to optical and acoustic perception technologies for underwater robots in turbid water with low visibility, enhancing the robots’ information perception capabilities. The LTWS mainly consisted of carbon fiber whiskers, silicone sheaths, triggers, memory alloy springs, sensing units, and a base. The subtle deflection of the carbon fiber whiskers drove the trigger to approach and squeeze the sensing unit in the corresponding direction, thereby generating an electric signal. The sensing signal of LTWS had a linear relationship with the lateral displacement of the whiskers, and the sensitivity could reach 7.9 mV/mm. The touch frequency had a small impact on the output signal. LTWS enriched the perception methods of underwater robots, providing a new approach to marine information perception.
-
Key words:
- liquid metal /
- triboelectric nanogenerator /
- underwater robot /
- biomimetic whisker /
- tractile sensor
-

图 5 仿生触须力学模型示意图
Figure 5. Schematic diagram of the mechanical model of bionic tentacles

图 8 在变触碰偏移幅度下的LTWS触碰参数定义
Figure 8. Definition of LTWS touch parameters under variable touch offset amplitude

图 9 不同触碰偏移幅度下传感单元的电压响应
Figure 9. The voltage response of sensing unit under different touch offsets

图 10 传感单元电压响应与触碰偏移幅度拟合关系
Figure 10. The fitting relationship between the voltage response of sensing unit and the touch offset amplitude

图 11 在变触碰频率下的LTWS触碰参数定义
Figure 11. Definition of LTWS touch parameters under variable touch frequency

图 12 不同触碰频率下传感单元电压响应
Figure 12. The voltage response of sensor unit under different touch frequencies
-
[1] 许欣欣. 海洋监测技术发展现状研究及应用[J]. 中国战略新兴产业, 2018, 24(6): 180. [2] BALASURIYA A, URA T. Vision-based underwater cable detection and following using AUVs[C]//Oceans’02 MTS/IEEE. Biloxi, MI, USA: IEEE, 2002. [3] ZHOU M, BACHMAYER R, DE YOUNG B. Underwater acoustic-based navigation towards multi-vehicle operation and adaptive oceanographic sampling[C]//2017 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Vancouver, BC, Canada: IEEE, 2017. [4] 胡瀚文, 王猛, 程卫平, 等. 水下视觉SLAM的图像滤波除尘与特征增强算法[J]. 机器人, 2023, 45(2): 197-206. doi: 10.13973/j.cnki.robot.210406 [5] LYTHGOE J N, HEMMINGS C C. Polarized light and underwater vision[J]. Nature, 1967, 213(5079): 893-894. doi: 10.1038/213893a0 [6] KOU S, FENG X, BI Y, et al. High-resolution angle-Doppler imaging by sparse recovery of underwater acoustic signals[J]. Chinese Journal of Acoustics, 2020, 39(2): 133-150. [7] MUSCOLO G G, CANNATA G. A novel tactile sensor for underwater applications: limits and perspectives[C]//Oceans 2015. Genova, Italy: IEEE, 2015: 1-7. [8] XU P, LIU J, LIU X, et al. A bio-inspired and self-powered triboelectric tactile sensor for underwater vehicle perception[J]. npj Flexible Electronics, 2022, 6(1): 252-261. [9] ASADNIA M, KOTTAPALLI A G P, MIAO J, et al. Artificial fish skin of self-powered micro-electromechanical systems hair cells for sensing hydrodynamic flow phenomena[J]. Journal of the Royal Society Interface, 2015, 12(111): 20150322. doi: 10.1098/rsif.2015.0322 [10] TAN D, WANG Q, SONG R, et al. Optical fiber based slide tactile sensor for underwater robots[J]. Journal of Marine Science and Application, 2008, 7(2): 122-126. doi: 10.1007/s11804-008-7055-3 [11] 徐鹏, 刘建华, 谢广明, 等. 基于柔性摩擦纳米发电机的水下仿生胡须传感器研究[J]. 兵工自动化, 2022, 41(12): 20-24. [12] WETTELS N, PARNANDI A R, MOON J H, et al. Grip control using biomimetic tactile sensing systems[J]. IEEE/ASME Transactions on Mechatronics, 2009, 14(6): 718-723. doi: 10.1109/TMECH.2009.2032686 [13] ISKAROUS M M, THAKOR N V. E-skins: Biomimetic sensing and encoding for upper limb prostheses[J]. Proceedings of the IEEE, 2019, 107(10): 2052-2064. doi: 10.1109/JPROC.2019.2939369 [14] XIN Y, TIAN H, GUO C, et al. A biomimetic tactile sensing system based on polyvinylidene fluoride film[J]. Review of Scientific Instruments, 2016, 87(2): 025002-1-025002-9. doi: 10.1063/1.4941736 [15] GÖPEL W. New materials and transducers for chemical sensors[J]. Sensors and Actuators B: Chemical, 1994, 18(1-3): 1-21. doi: 10.1016/0925-4005(94)87049-7 [16] CHEN H, XU Y, BAI L, et al. Optimization of contact-mode triboelectric nanogeneration for high energy conversion efficiency[J]. Science China Information Sciences, 2018, 61(6): 78-86. [17] YOO D, LEE S, LEE J W, et al. Reliable DC voltage generation based on the enhanced performance triboelectric nanogenerator fabricated by nanoimprinting-poling process and an optimized high efficiency integrated circuit[J]. Nano Energy, 2020, 69: 104388. doi: 10.1016/j.nanoen.2019.104388 [18] DHARMASENA R, SILVA S R P. Towards optimized triboelectric nanogenerators[J]. Nano Energy, 2019, 62: 530-549. doi: 10.1016/j.nanoen.2019.05.057 [19] DICKEY M D, CHIECHI R C, LARSEN R J, et al. Eutectic gallium-indium: A liquid metal alloy for the formation of stable structures in microchannels at room temperature[J]. Advanced Functional Materials, 2008, 18(7): 1097-1104. doi: 10.1002/adfm.200701216 [20] 飯田孝道, 罗格里克·格斯里. 液态金属的物理性能[M]. 北京: 科学出版社, 2006. [21] SZYMAK P, PRACZYK T, NAUS K, et al. Research on biomimetic underwater vehicles for underwater ISR[C]//Ground/Air Multisensor Interoperability, Integration, and Networking for Persistent ISR VII. Baltimore, MD, United States: SPIE, 2016. [22] KRUUSMAA M, FIORINI P, MEGILL W, et al. Filose for svenning: A flow sensing bioinspired robot[J]. IEEE Robotics & Automation Magazine, 2014, 21(3): 51-62. [23] GUO S, SHI L. A multifunctional underwater biomimetic microrobot[M]//Robot Fish: Bio-inspired Fishlike Underwater Robots. Berlin: Springer, 2015: 285-313. [24] XU P, ZHENG J, LIU J, et al. Deep-learning-assisted underwater 3D tactile tensegrity[J]. Research, 2023, 6: 0062. doi: 10.34133/research.0062 [25] NIU S, WANG S, LIN L, et al. Theoretical study of contact-mode triboelectric nanogenerators as an effective power source[J]. Energy & Environmental Science, 2013, 6(12): 3576-3583. -

 下载:
下载:













 点击查看大图
点击查看大图
计量
- 文章访问数: 874
- HTML全文浏览量: 330
- PDF下载量: 184
- 被引次数: 0