

Dynamic Modeling and Experimental Study of Biomimetic Robotic Manta Ray
-
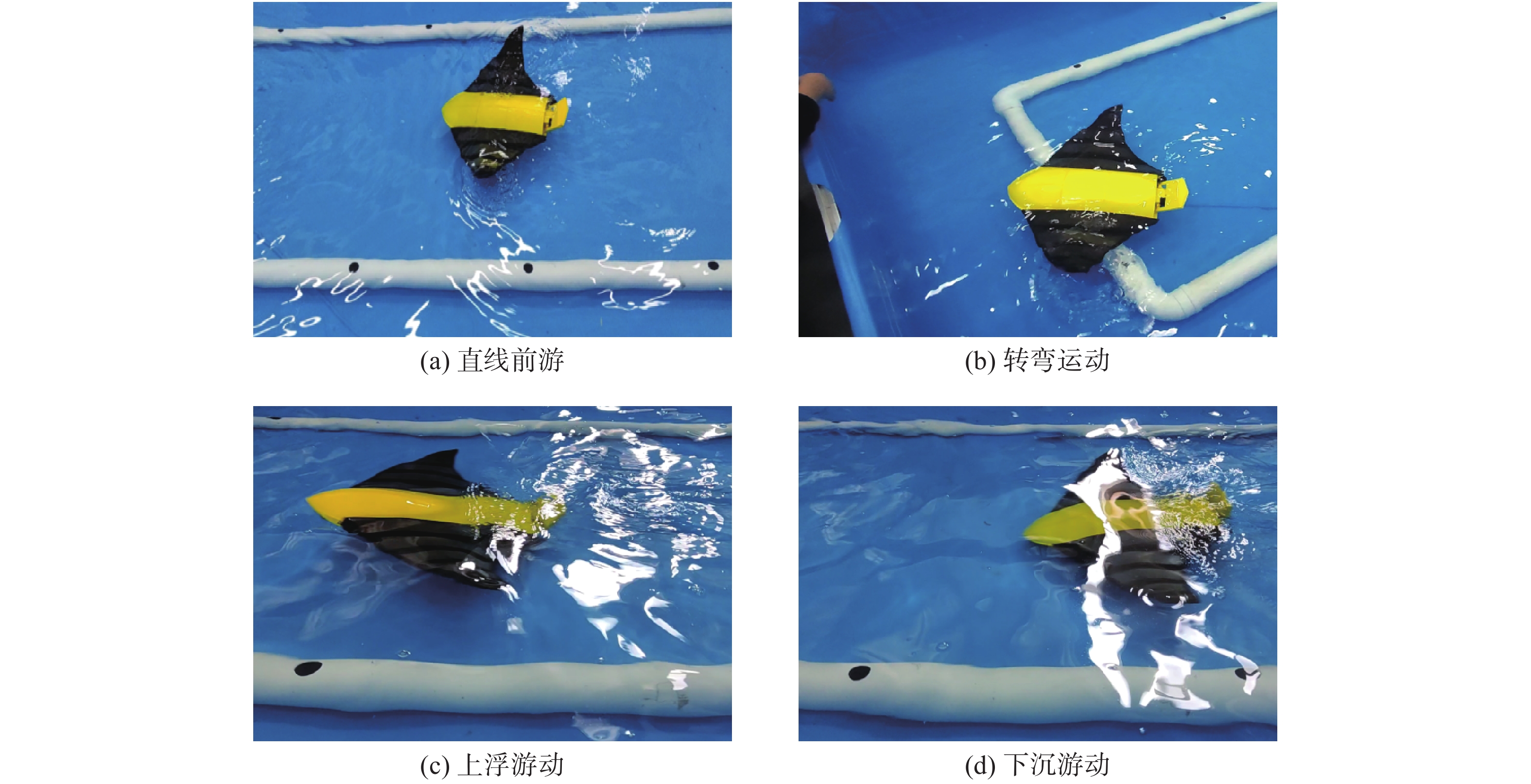
摘要: 仿生机器蝠鲼独特的胸鳍摆动推进方式更适合风浪干扰环境下长航时水下作业需求, 国内外已经开展了相关研究, 但目前仿生机器蝠鲼研究中存在驱动能力弱、控制精度低、仿生效果差等问题。文中以蝠鲼为仿生原型, 分析其生物学特性和运动机理, 构建运动学模型和动力学模型, 为仿生机器蝠鲼的系统设计提供了理论依据, 设计了机械结构和控制系统, 通过模拟波浪干扰环境下的直线前游、原地转弯和动态沉浮等试验, 测试了仿生机器蝠鲼在复杂环境下的性能, 验证了仿生机器蝠鲼的运动性能和应用前景。Abstract: The unique pectoral fin swinging propulsion method of biomimetic robotic manta ray is more suitable for long-term underwater operations in wind and wave environments. Relevant research has been conducted both in China and abroad, but there are problems in the current research on biomimetic robotic manta ray, such as weak driving ability, low control accuracy, and poor biomimetic effects. This article took the natural manta ray as a biomimetic prototype, analyzed its biological characteristics and motion mechanism, and constructed its kinematics and dynamics models, thus providing a theoretical basis for the system design of the biomimetic robotic manta ray. The mechanical structure and control system were also designed. The experiments of straight forward swimming, in situ turning, and dynamic sinking and floating were carried out under simulated wave environments to test the performance of the biomimetic robotic manta ray in complex environments, verifying the motion performance and application prospect of biomimetic robotic manta ray.
-
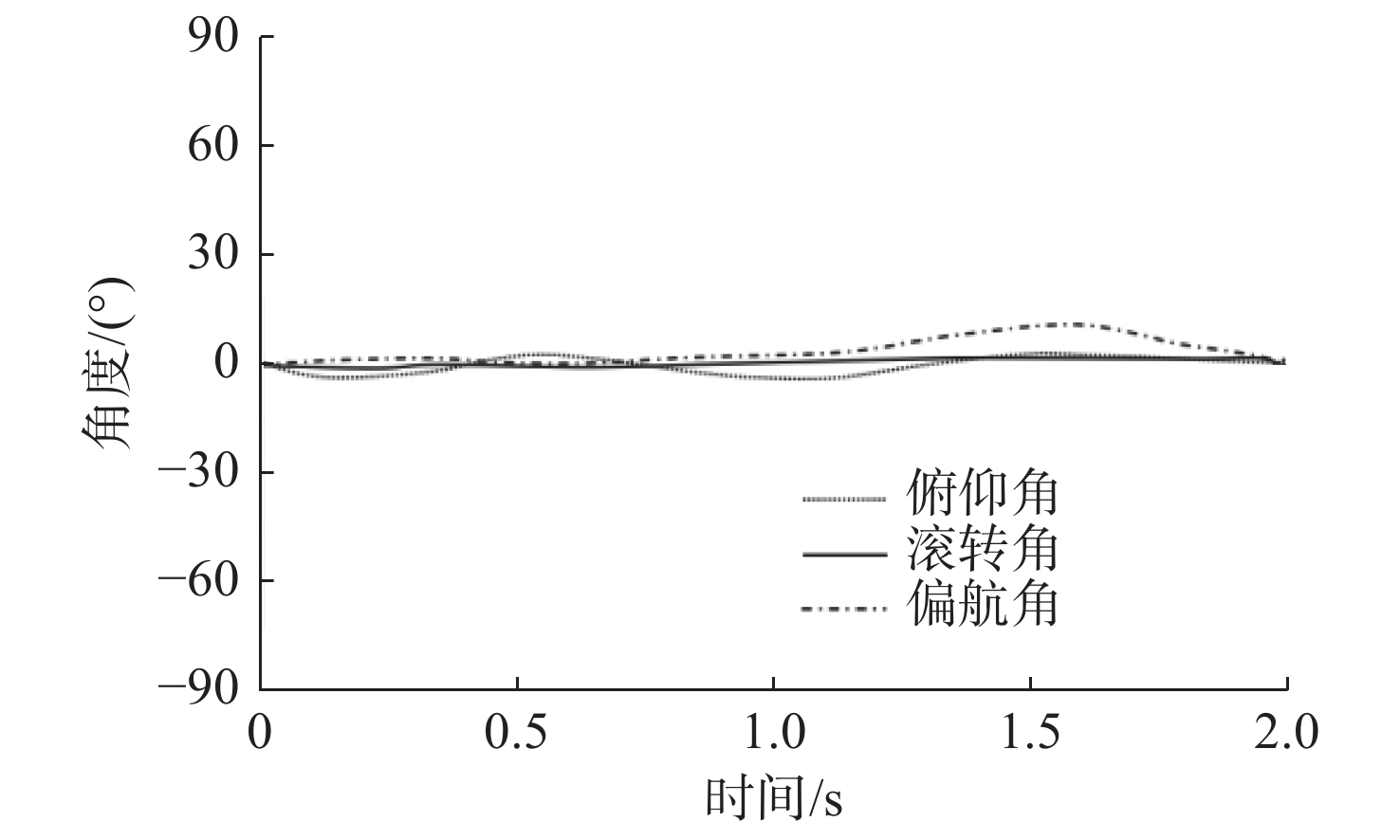
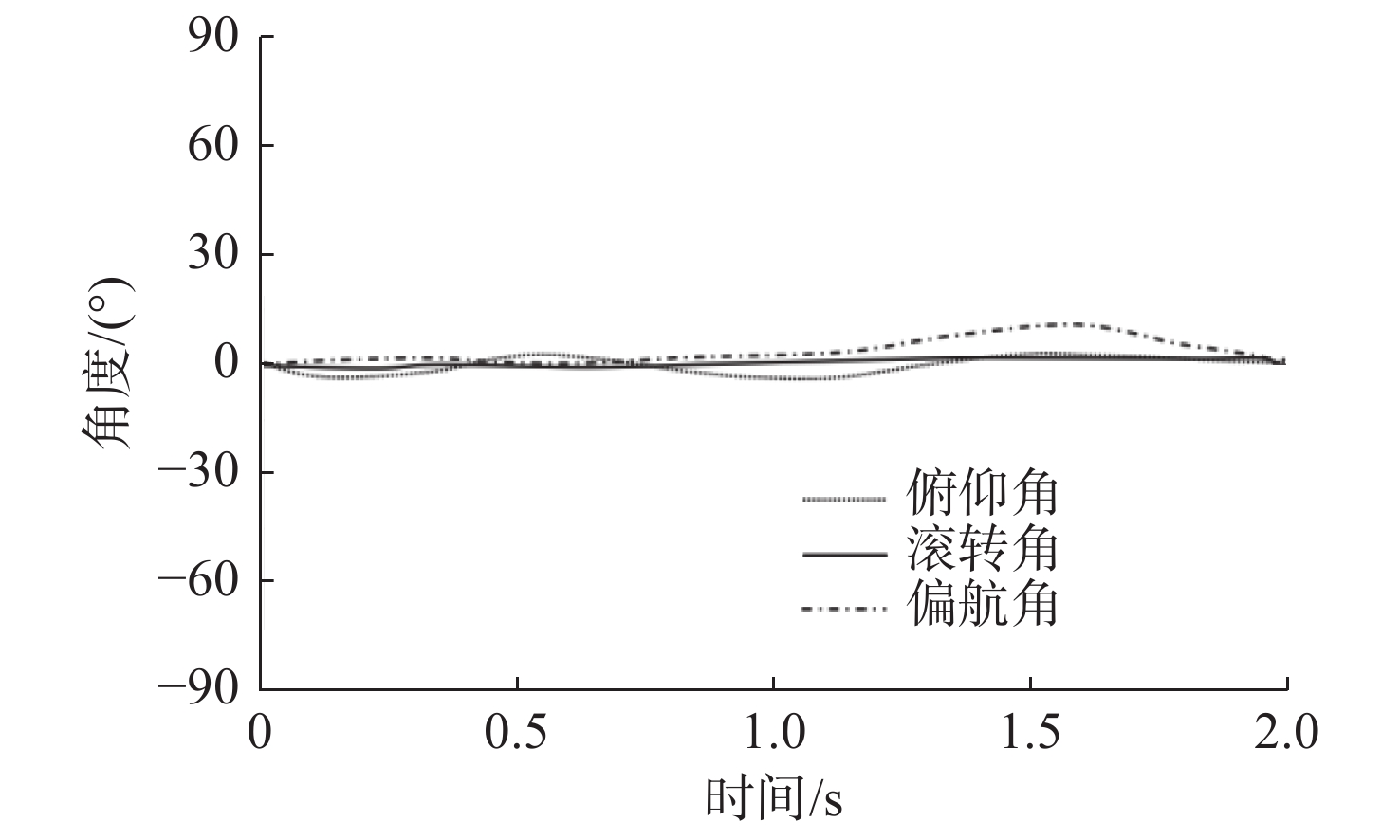
图 6 有波浪干扰下直线前游试验陀螺仪数据
Figure 6. Gyroscope data for straight-line forward test under wave interference
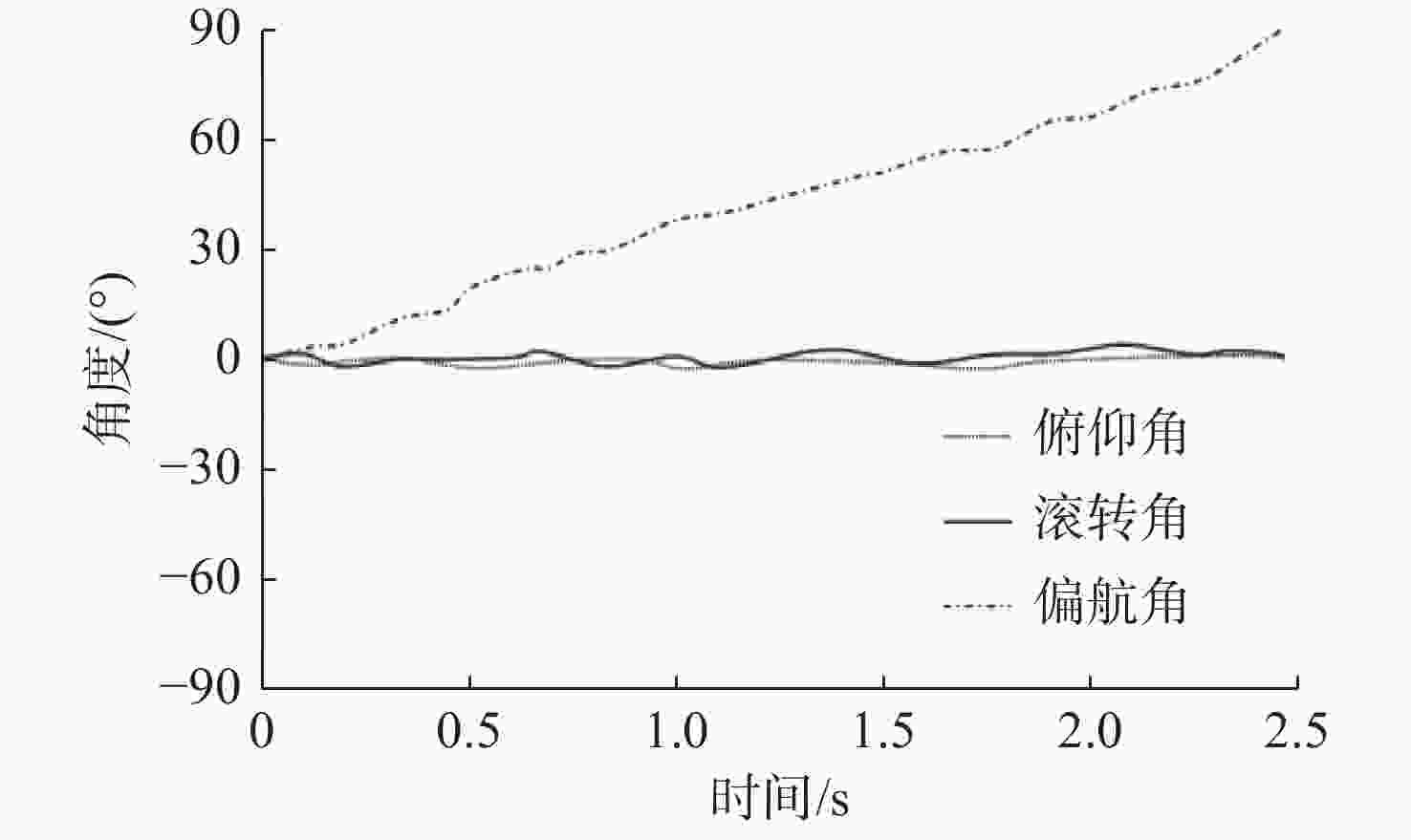
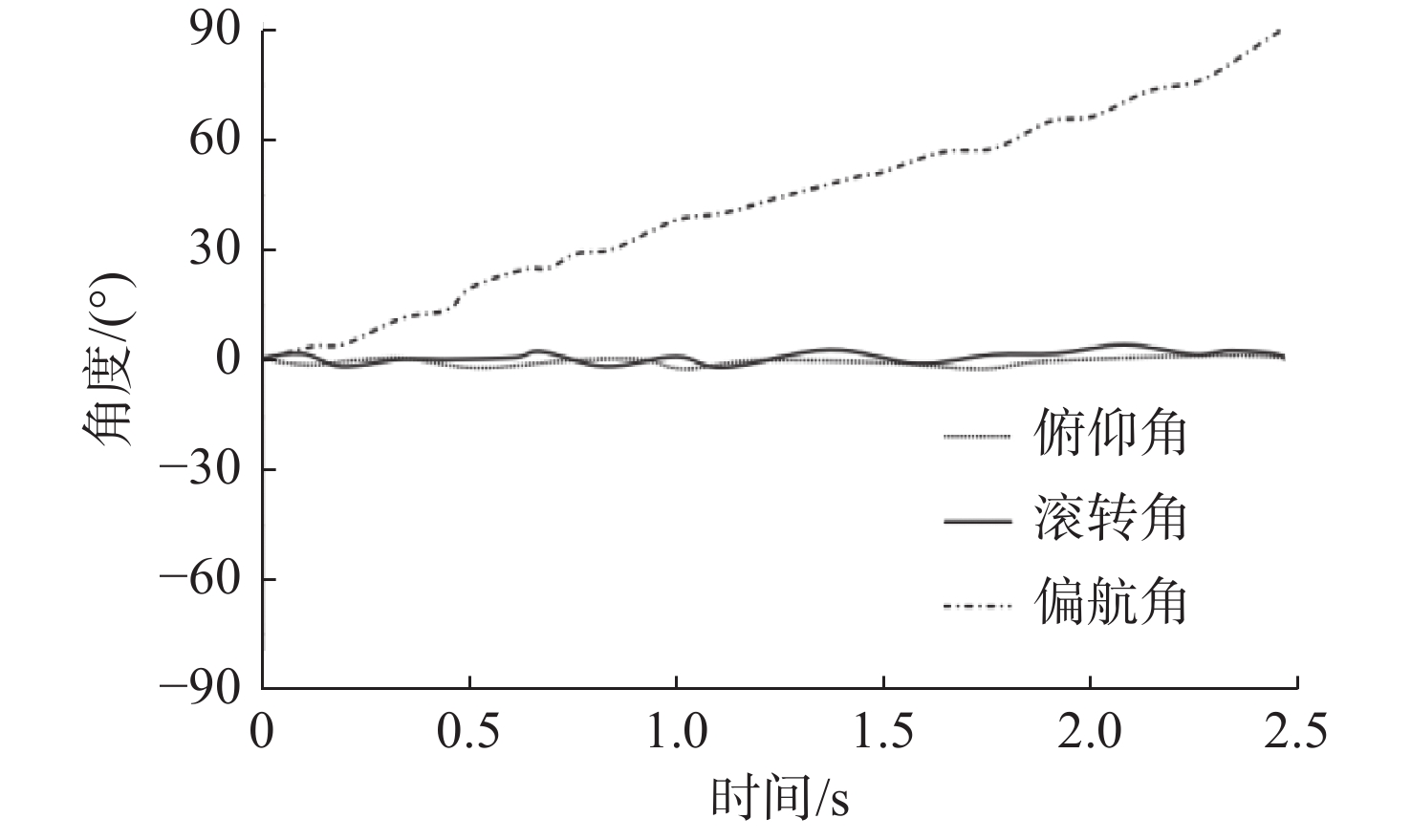
图 7 有波浪干扰下原地转弯试验陀螺仪数据
Figure 7. Gyroscope data for in-situ turning test under wave interference
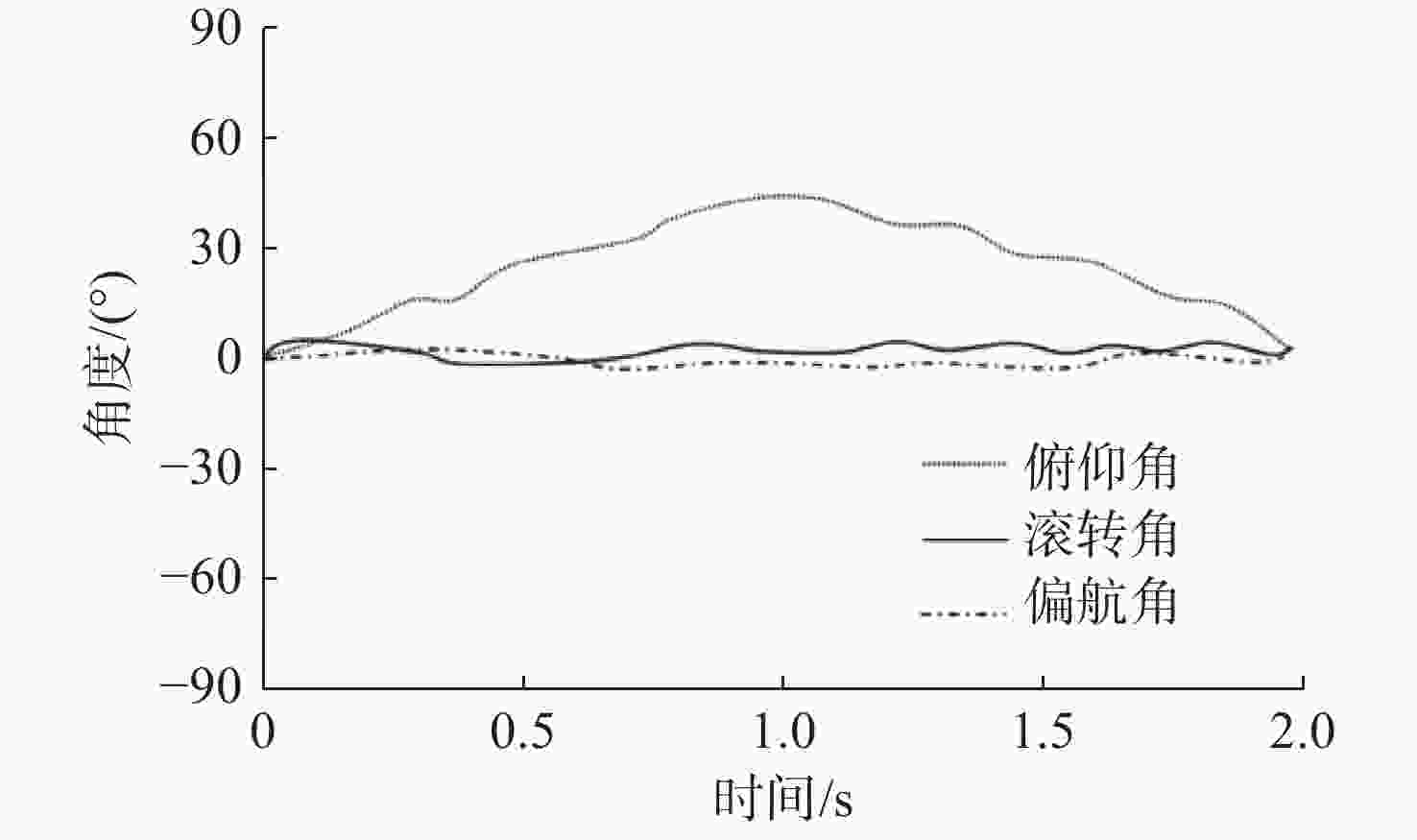
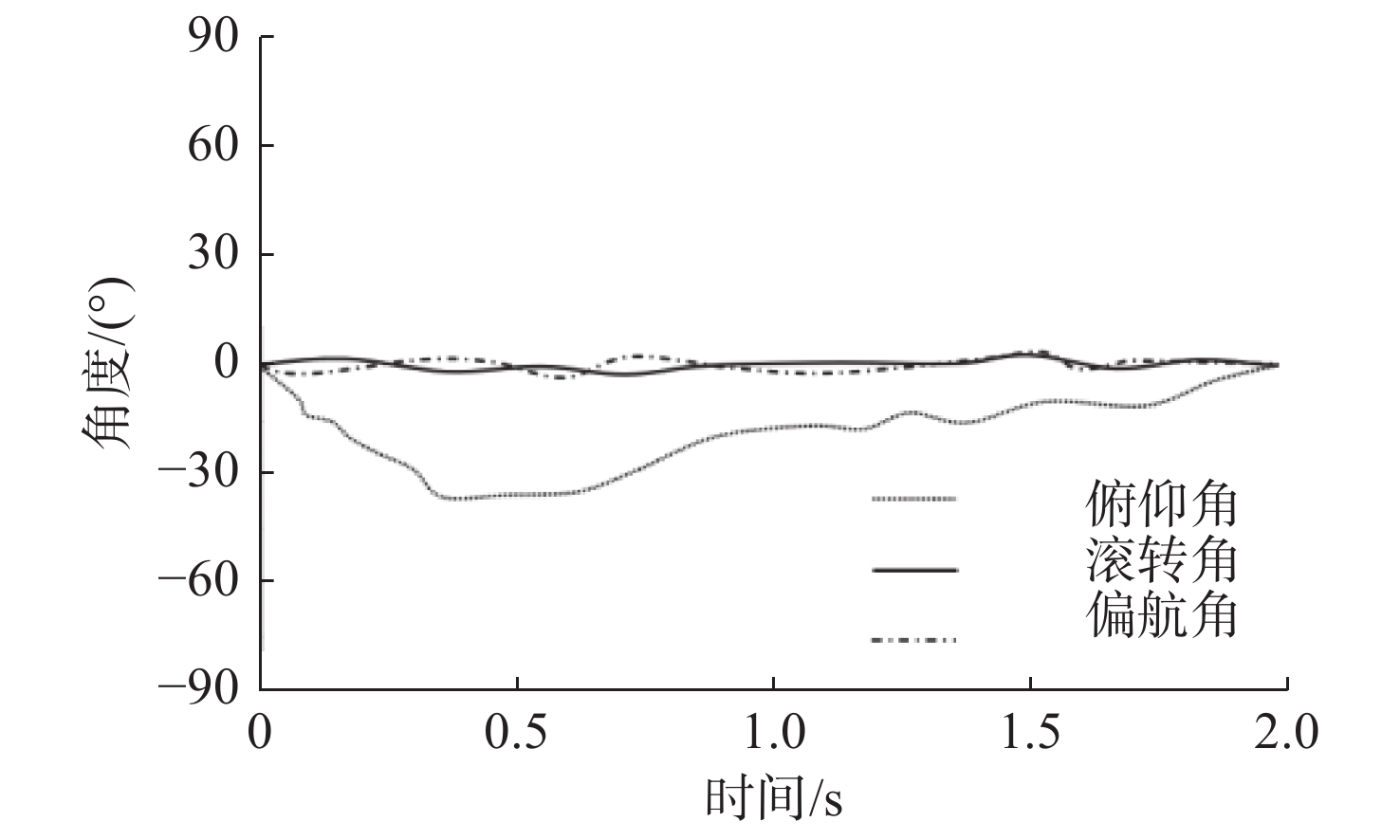
图 8 有波浪干扰下上浮游动试验陀螺仪数据
Figure 8. Gyroscope data for floating test with wave interference
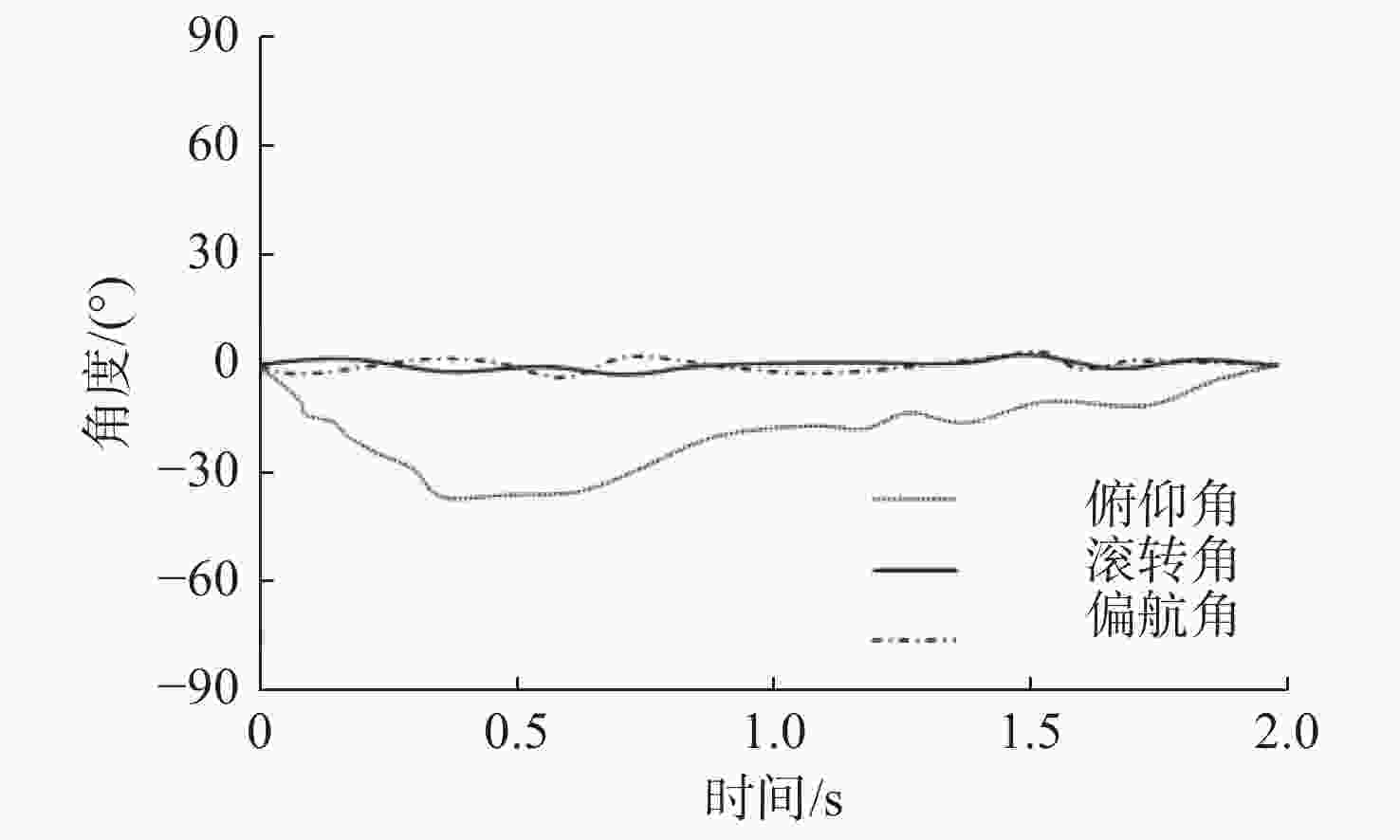
图 9 有波浪干扰下下沉游动试验陀螺仪数据
Figure 9. Gyroscope data for sinking test under wave interference
表 1 仿生机器蝠鲼相关参数
Table 1. Parameters of biomimetic robotic manta ray
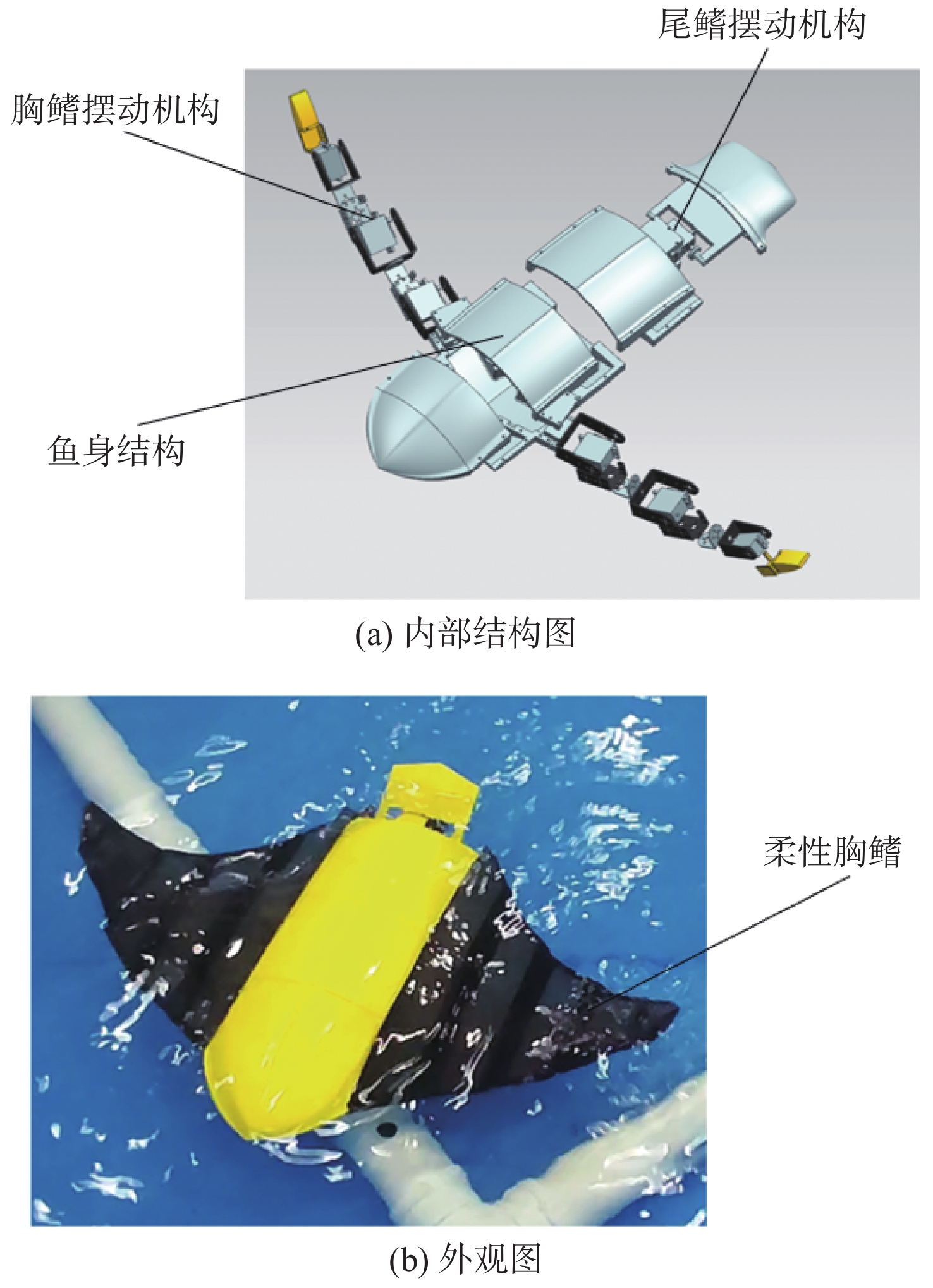
功能参数 描述 总尺寸(长×宽×高) 48 cm×70 cm×8 cm 总质量 8.5 kg 胸鳍尺寸(长×宽×高) 35 cm×27 cm×4 cm 胸鳍质量 1.7 kg 胸鳍摆动机构驱动方式 舵机驱动, 左右3关节, 共6个舵机 尾鳍摆动机构驱动方式 舵机驱动, 1个舵机  下载: 导出CSV
下载: 导出CSV
表 2 续航测试试验数据
Table 2. Data of endurance test
机器人型号 续航时间/h 续航里程/km BW Space Pro 0.92 4.27 GLADIUS MINI 0.85 4.78 仿生机器蝠鲼 1.18 4.85
下载: 导出CSV
-
[1] Prater A J, Adessi A. A bio-inspired submersible design[C]//Oceans 2017-Anchorage. AK, Anchorage: IEEE, 2017: 1-5. [2] 闫继宏, 石培沛, 张新彬, 等. 软体机械臂仿生机理、驱动及建模控制研究发展综述[J]. 机械工程学报, 2018, 54(15): 1-14. doi: 10.3901/JME.2018.15.001Yan Jihong, Shi Peipei, Zhang Xinbin, et al. Review of biomimetic mechanism, actuation, modeling and control in soft manipulators[J]. Journal of Mechanical Engineering, 2018, 54(15): 1-14. doi: 10.3901/JME.2018.15.001 [3] Chen Z, Um T, Zhu J, et al. Bio-inspired robotic cownose ray propelled by electroactive polymer pectoral fin[C]//ASME International Mechanical Engineering Congress and Exposition. Colorado, Denver: ASME, 2011: 817-824. [4] Tüysüz A, Breisch S, Molter T. Linear actuator utilizing magnetic shape memory material[C]//2019 12th International Symposium on Linear Drives for Industry Applications(LDIA). Switzerland, Neuchatel: IEEE, 2019: 1-4. [5] Chung C K, Fung P K, Hong Y Z, et al. A novel fabrication of ionic polymer metal composites(PMC) actuator with silver nano-powders[J]. Sensors and Actuators B: Chemical, 2006, 117(2): 367-375. doi: 10.1016/j.snb.2005.11.021 [6] Zhang D, Pan G, Cao Y, et al. A novel integrated gliding and flapping propulsion biomimetic manta-ray robot[J]. Journal of Marine Science and Engineering, 2022, 10(7): 924. doi: 10.3390/jmse10070924 [7] Cao Y, Bao T, Cao Y, et al. Effects of bionic bone flexibility on the hydrodynamics of pectoral fins[J]. Journal of Marine Science and Engineering, 2022, 10(7): 981. doi: 10.3390/jmse10070981 [8] Cao Y, Ma S, Cao Y, et al. Similarity evaluation rule and motion posture optimization for a manta ray robot[J]. Journal of Marine Science and Engineering, 2022, 10(7): 908. doi: 10.3390/jmse10070908 [9] 高帅. 仿生鳐鱼的结构设计与实验研究[D]. 哈尔滨: 哈尔滨工业大学, 2014. [10] 刘贵杰, 刘展文, 田晓洁, 等. 智能材料在水下仿生机器人驱动中的应用综述[J]. 中国海洋大学学报(自然科学版), 2018, 48(3): 114-120.Liu Guijie, Liu Zhanwen, Tian Xiaojie, et al. A review of the application of intelligent materials in underwater biomimetic robot[J]. Periodical of Ocean University of China, 2018, 48(3): 114-120. [11] 杨垒. 胸鳍推进仿生鱼的结构设计及水动力学研究[D]. 重庆: 重庆交通大学, 2018. [12] 喻俊志, 谭民, 王硕. 高机动仿生机器鱼设计与控制技术[M]. 武汉: 华中科技大学出版社, 2018. [13] Fish F E, Schreiber C M, Moored K W, et al. Hydrodynamic performance of aquatic flapping: efficiency of underwater flight in the manta[J]. Aerospace, 2016, 3(3): 20. doi: 10.3390/aerospace3030020 [14] Bianchi G, Maffi L, Tealdi M, et al. A bioinspired cownose ray robot for seabed exploration[J]. Biomimetics, 2023, 8(1): 30. doi: 10.3390/biomimetics8010030 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 1561
- HTML全文浏览量: 285
- PDF下载量: 144
- 被引次数: 0





