

Motion Control Simulation of Underwater Gliders in Kuroshio
-
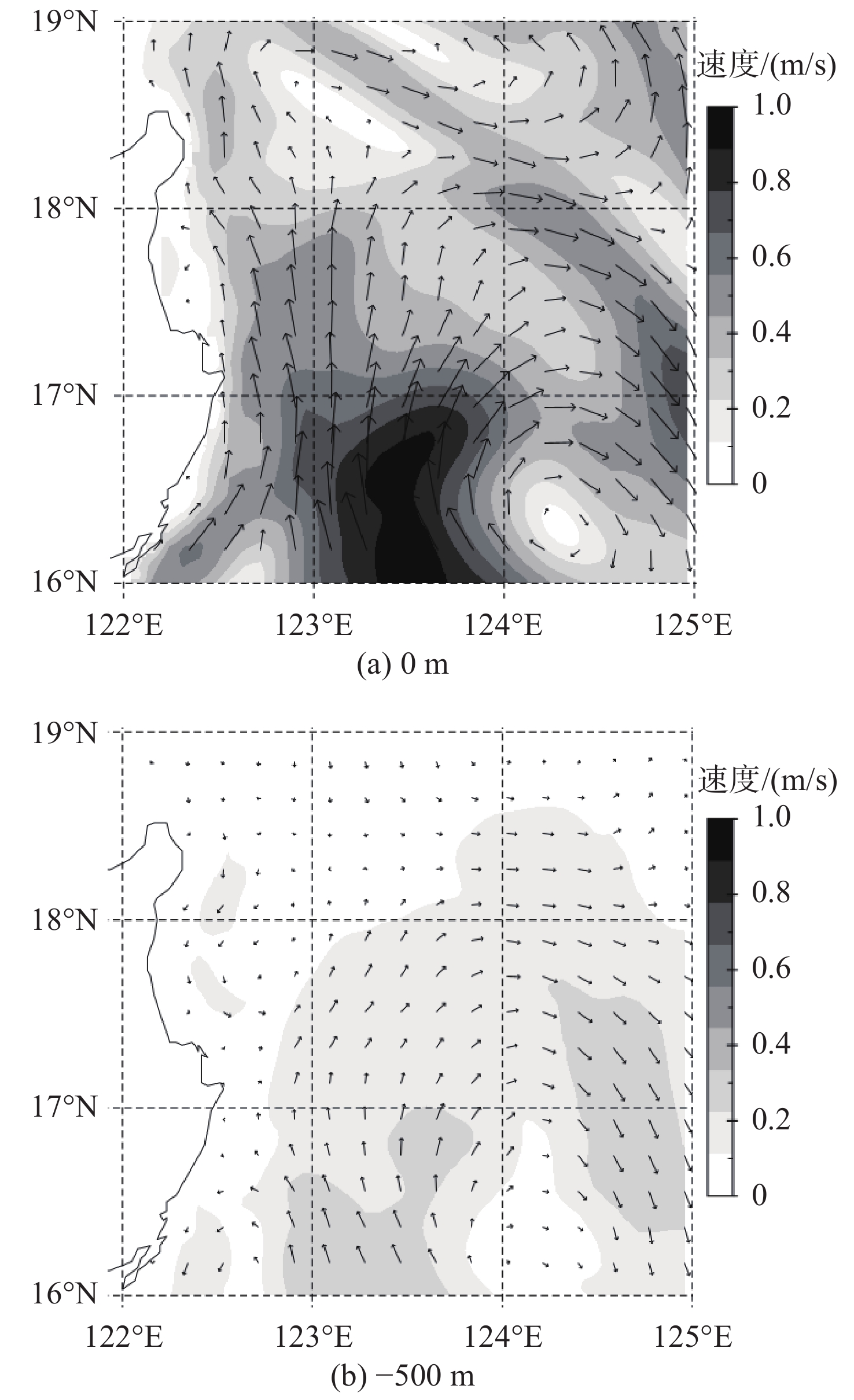
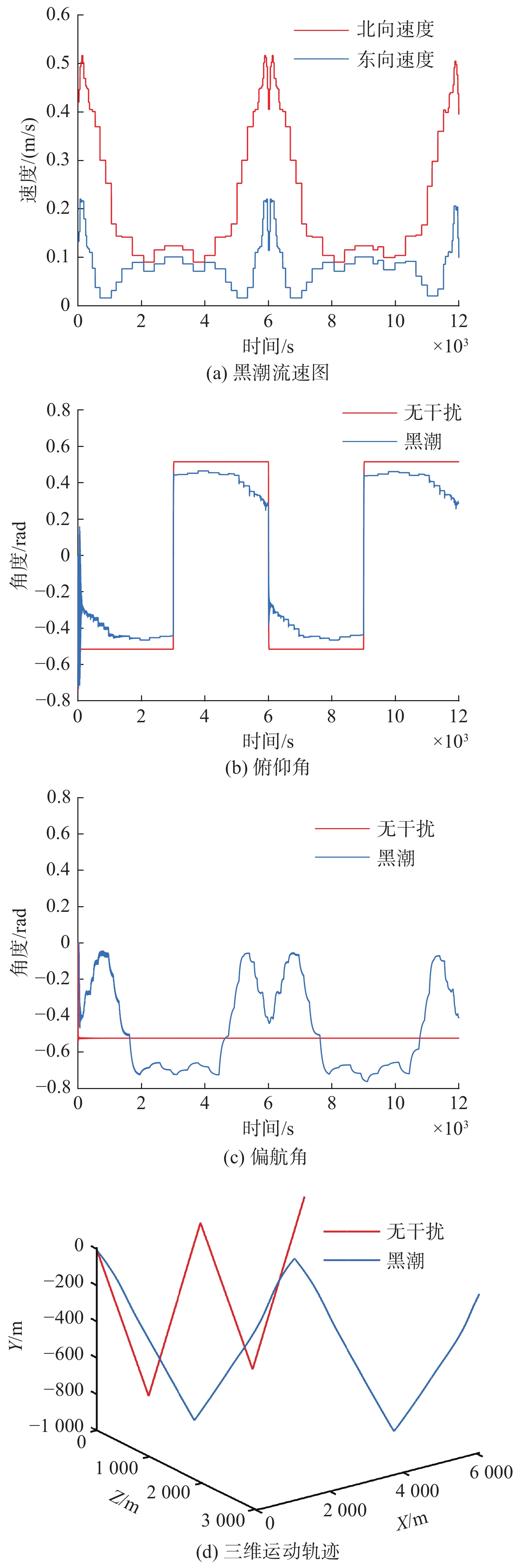
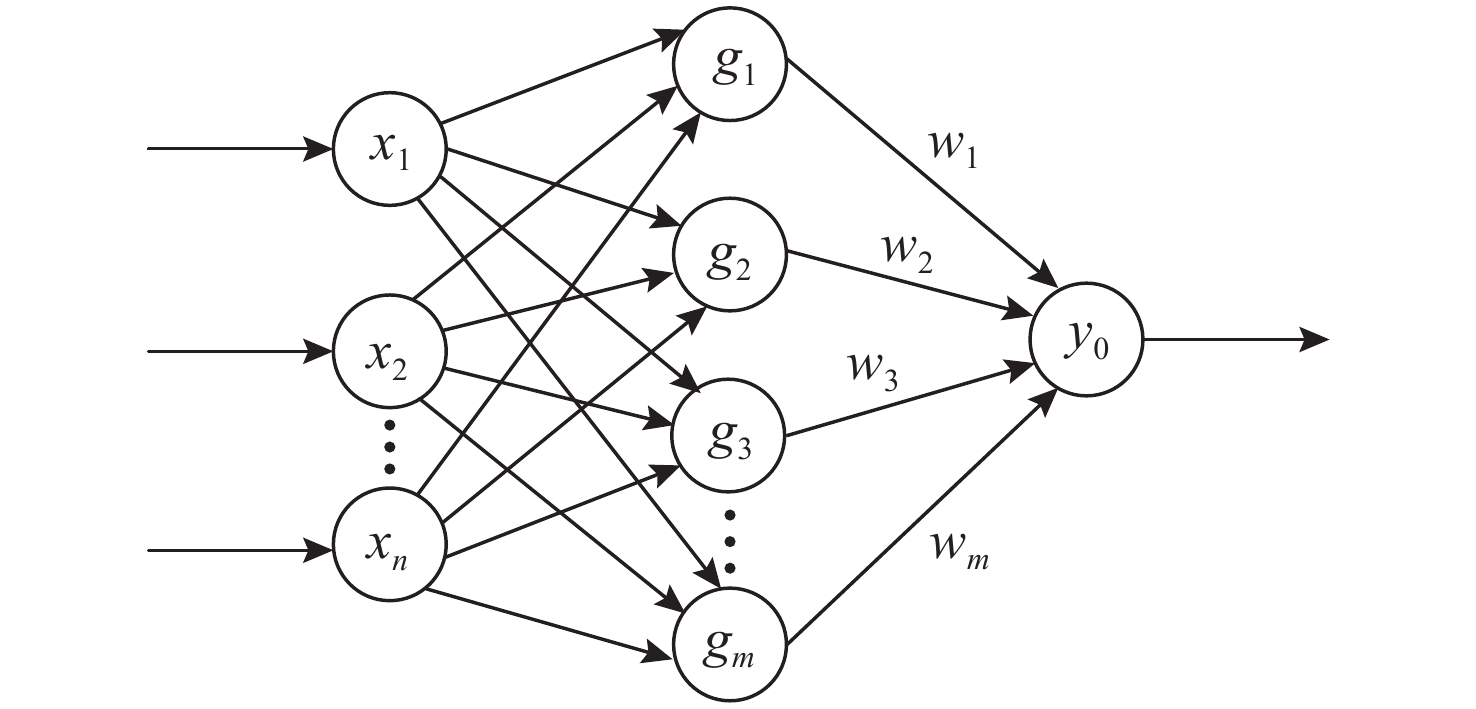
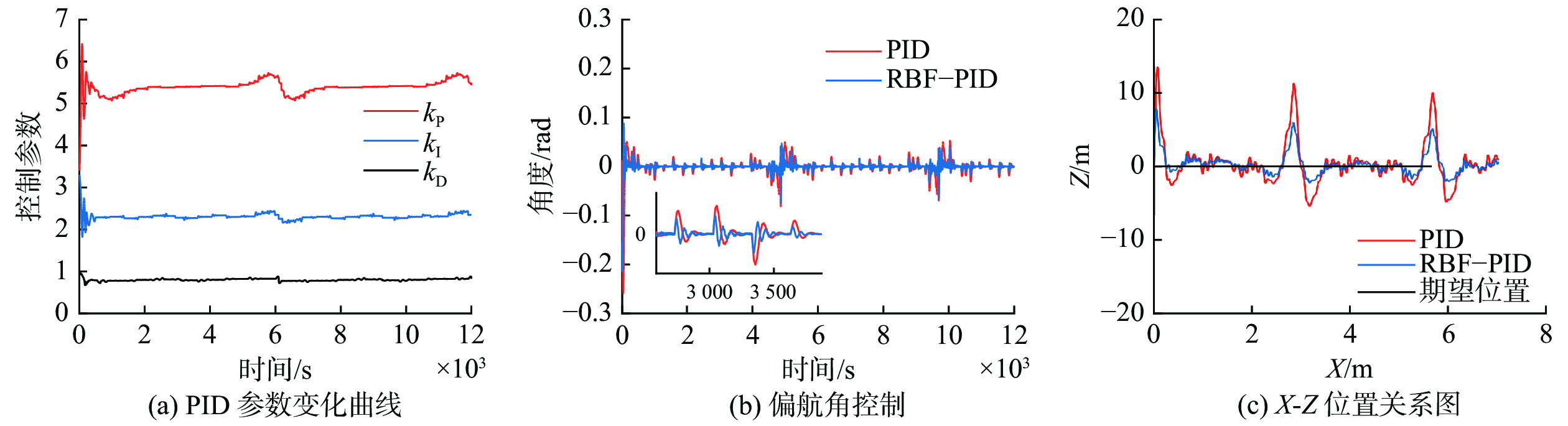
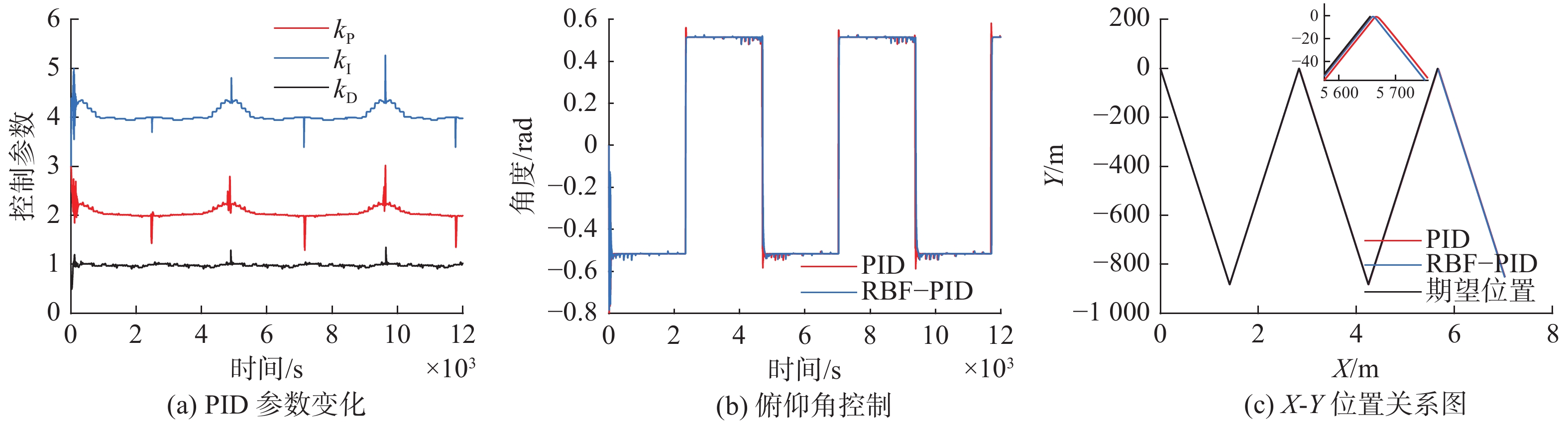
摘要: 近年来, 水下滑翔机已广泛应用于各种海洋观测领域, 但在对黑潮等强流进行观测时, 其运动轨迹往往会受到严重影响, 因此文中针对黑潮流域内水下滑翔机运动轨迹控制问题进行研究。首先, 以“海燕II”为研究对象, 根据动量和动量矩定理建立了其考虑黑潮的动力学模型; 然后将HYCOM黑潮区域数据作为干扰, 其特点是黑潮流速的大小与方向都会随着位置的变化而改变, 并利用Simulink对强流影响下的“海燕II”运动轨迹进行了仿真; 最后, 将径向基函数(RBF)神经网络与常规比例-积分-微分(PID)控制器相结合, 对“海燕II”的偏航与纵倾运动进行控制。仿真结果表明RBF-PID控制器可以在一定程度上提高“海燕II”在黑潮区域运动的跟踪精度, 增强抵抗黑潮干扰的能力, 可为在强流影响下的水下滑翔机轨迹控制提供参考。
-
关键词:
- 水下滑翔机 /
- 黑潮 /
- 运动控制 /
- 径向基函数 /
- 比例-积分-微分控制
Abstract: In recent years, underwater gliders have been widely used in the observation of various ocean surveys. However, their motion is often seriously affected when observing strong currents such as the Kuroshio. Therefore, the motion control of underwater gliders in the Kuroshio was studied in this paper. First, with Petrel-II as the research object, a dynamics model considering the Kuroshio was established based on the momentum and momentum moment theorem. Then, the Kuroshio data downloaded from the HYCOM website was used as interference, which featured varying speeds and directions of Kuroshio at different positions, and Simulink was used to simulate the motion of the Petrel-II under the influence of strong currents. Finally, the radial basis function(RBF) neural network was combined with the conventional proportional-integral-derivative(PID) controller to control the yaw motion and trim motion of the Petrel-II. The simulation results show that the RBF-PID controller can improve the motion tracking accuracy of Petrel-II in the Kuroshio area and enhance its ability to resist the interference of the Kuroshio. This study can provide a reference for the motion control of underwater gliders under the influence of strong currents to some extent. -
表 1 “海燕II”主要几何物理参数及数值
Table 1. Physical parameters and values of Petrel-II
名称 物理参数 数值 总质量/kg m 69 俯仰调节重块质量/kg $ {m_p} $ 18 横滚调节重块质量/kg $ {m_r} $ 18 海水密度/(kg/m3) $\rho $ 1 022 重力/(m/s2) g 9.8 质心与浮心间位置分量/m $ {y_G} $ −0.06 横截面积/m2 $ {A_D} $ 0.038 长度/m L 2.17 驱动浮力作用点到浮心的距离/m $ {l_b} $ 0.93 附加质量/kg $ {\lambda _{11}} $ 2 $ {\lambda _{22}} $ 75.8 $ {\lambda _{33}} $ 103 附加惯矩/kg·m² $ {\lambda _{44}} $ 9.5 $ {\lambda _{55}} $ 43 $ {\lambda _{66}} $ 31 纵向力系数 ${C_x}(0)$ −0.41 垂向力系数 $ C_y^\alpha $ 0.3 $ C_y^r $ −1.6 横向力系数 $ C_z^\beta $ −1.6 $ C_z^q $ 4.25  下载: 导出CSV
下载: 导出CSV
表 2 偏航运动控制中PID与RBF-PID指标对比
Table 2. Comparison of PID and RBF-PID index in yaw motion control
控制算法 平均误差 均方误差 PID 1.625 9 7.184 1 RBF-PID 0.825 7 1.891 7
下载: 导出CSV
-
[1] Webb D C, Simonetti P J, Jones C P. SLOCUM: An underwater glider propelled by environmental energy[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 447-452. doi: 10.1109/48.972077 [2] Eriksen C C, Osse T J, Light R D, et al. Seaglider: A long-range autonomous underwater vehicle for oceanographic research[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 424-436. doi: 10.1109/48.972073 [3] 杨绍琼, 李元昊, 孙通帅, 等. “海燕”号谱系化水下滑翔机技术发展与应用[J]. 水下无人系统学报, 2023, 31(1): 68-85.Yang Shaoqiong, Li Yuanhao, Sun Tongshuai, et al. Development and application of Petrel serialized underwater glider technologies[J]. Journal of Unmanned Undersea Systems, 2023, 31(1): 68-85. [4] 褚福硕, 司宗尚, 庞重光, 等. 海翼水下滑翔机测流应用[J]. 海洋科学, 2022, 4 6(5): 10-16.Chu Fushuo, Si Zongshang, Pang Chongguang, et al. Sea Wing underwater glider depth average current[J]. Marine Science, 2022, 46(5): 10-16. [5] Fan S, Woolsey C A. Dynamics of underwater gliders in currents[J]. Ocean Engineering, 2014, 84: 249-258. doi: 10.1016/j.oceaneng.2014.03.024 [6] Bhatta P, Leonard N E. Stabilization and coordination of underwater gliders[C]//Proceedings of the 41st IEEE Conference on Decision and Control. Las Vegas, NV, USA: IEEE, 2002: 2081-2086. [7] Su Z, Zhou M, Han F, et al. Attitude control of underwater glider combined reinforcement learning with active disturbance rejection control[J]. Journal of Marine Science and Technology, 2019, 24: 686-704. doi: 10.1007/s00773-018-0582-y [8] Zhou H, Fu J, Zeng Z, et al. Adaptive robust tracking control for underwater gliders with uncertainty and time-varying input delay[J]. Ocean Engineering, 2021, 240: 109945. doi: 10.1016/j.oceaneng.2021.109945 [9] 秦悦, 王冠琳, 官晟, 等. 水下滑翔机中尺度过程空间采样运动仿真[J]. 水下无人系统学报, 2022, 30(4): 474-484, 513. doi: 10.11993/j.issn.2096-3920.202112003Qin Yue, Wang Guanlin, Guan Sheng, et al. Motion simulation of spatial sampling of mesoscale processes for underwater gliders[J]. Journal of Unmanned Undersea Systems, 2022, 30(4): 474-484, 513. doi: 10.11993/j.issn.2096-3920.202112003 [10] 张福斌, 汪刚, 陈宇航, 等. 水下滑翔机建模与运动PID控制[J]. 鱼雷技术, 2011, 19(2): 114-119.Zhang Fubin, Wang Gang, Chen Yuhang, et el. Modeling and PID control of underwater glider motion[J]. Torpedo Technology, 2011, 19(2): 114-119. [11] Wang Y, Niu W, Yu X, et al. Quantitative evaluation of motion performances of underwater gliders considering ocean currents[J]. Ocean Engineering, 2021, 236: 109501. doi: 10.1016/j.oceaneng.2021.109501 [12] Yu L, Xiong X, Guo Y. Analysis of the path and axis features of the Kuroshio at the depth of 15 m based on drifting buoy data[J]. Advances in Marine Science, 2014, 32(2): 316-323. [13] 陈弈煿, 张润锋, 杨绍琼, 等. 基于参数自整定PID的水下滑翔机航向控制方法[J]. 重庆大学学报, 2022, 45(8): 26-33.Chen Yibo, Zhang Runfeng, Yang Shaoqiong, et al. A steering control method of underwater glider based on parameters self-tuning PID[J]. Journal of Chongqing University, 2022, 45(8): 26-33. [14] 甘顺顺, 许宝杰, 黄小龙. 基于RBF神经网络的四旋翼无人机姿态控制[J]. 装备制造技术, 2021, 320(8): 28-35. doi: 10.3969/j.issn.1672-545X.2021.08.009Gan Shunshun, Xu Baojie, Huang Xiaolong. An attitude control of quad rotor UAV based on RBF neural network[J]. Equipment Manufacturing Technology, 2021, 320(8): 28-35. doi: 10.3969/j.issn.1672-545X.2021.08.009 [15] 常志东. 神经网络优化PID的舰船关键设备智能控制方法[J]. 舰船科学技术, 2022, 44(21): 168-171. doi: 10.3404/j.issn.1672-7649.2022.21.035Chang Zhidong. Intelligent control method of ship key equipment based on neural network optimization PID[J]. Ship Science and Technology, 2022, 44(21): 168-171. doi: 10.3404/j.issn.1672-7649.2022.21.035 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 1489
- HTML全文浏览量: 221
- PDF下载量: 131
- 被引次数: 0
图(6) / 表(2)




