

Energy-Saving Path Planning for AUVs in Current Environment Based on Improved PSO-Lévy Algorithm
-
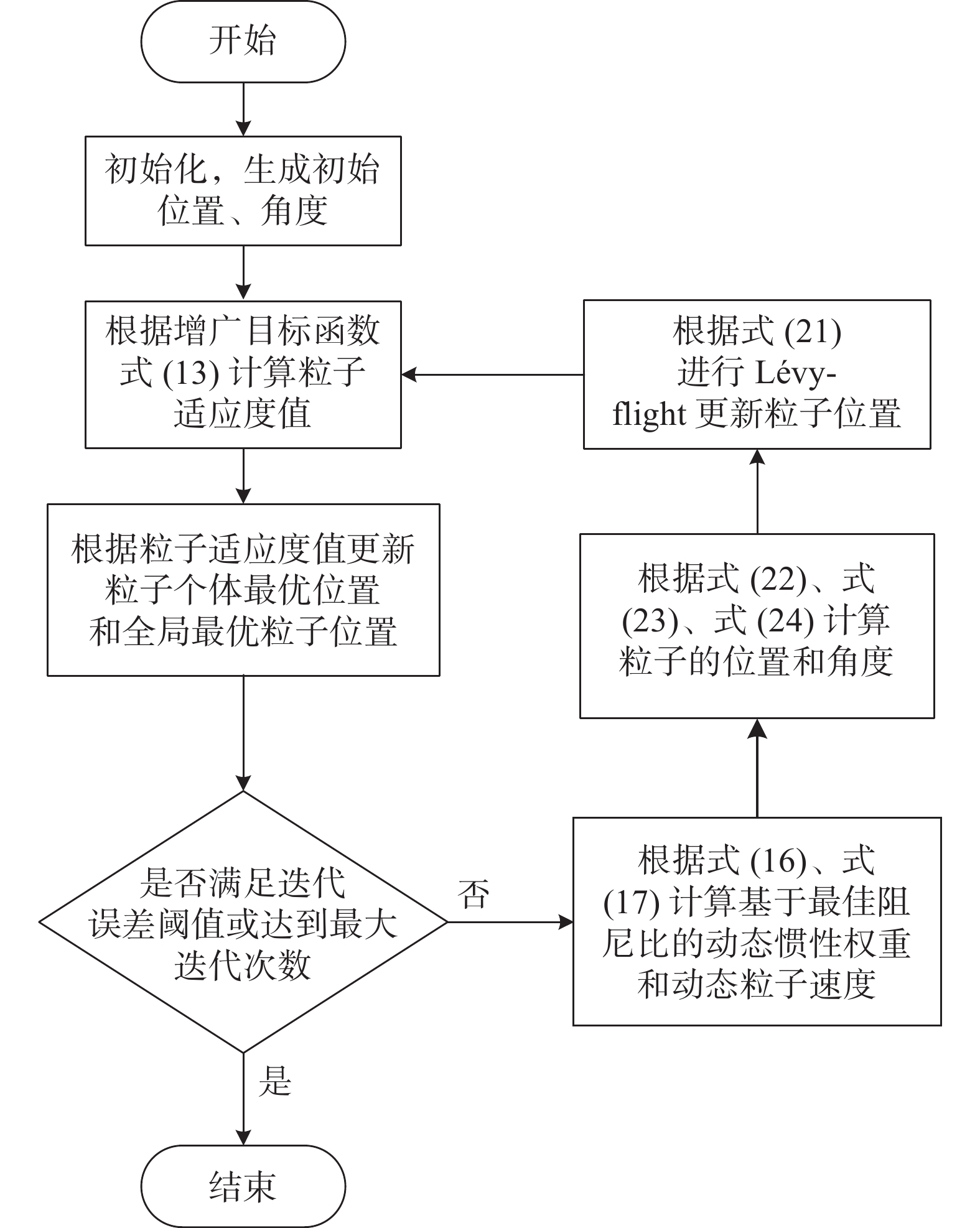
摘要: 为了获取海流环境中自主水下航行器(AUV)的节能避障路径, 建立了包含海流场速度信息和水下地形障碍的三维动态海流环境模型; 基于航行能耗、AUV机动性能约束和障碍物约束, 建立增广目标函数, 提出了一种基于权重调节机制和随机游走特性的改进粒子群优化-Lévy(PSO-Lévy)算法。将基于最佳阻尼比的参数调节策略和基于Lévy-flight过程的步长随机游走策略引入PSO算法, 通过概率执行粒子大步长游走操作以及对粒子惯性速度进行调控, 弥补了PSO步长短、跳出局部最优能力弱的劣势。仿真结果表明, 所提出的算法能在有效避开障碍物的同时利用海流信息规划出低能耗的最优路径。Abstract: To obtain energy-saving obstacle avoidance paths of autonomous undersea vehicles(AUVs) in the current environment, a three-dimensional dynamic current environment model based on current field velocity information and underwater topographic obstacles was established. The augmented objective function was established based on navigation energy consumption, AUV maneuvering performance, and obstacle constraints, and an improved particle swarm optimization-Lévy(PSO-Lévy) algorithm based on weight adjustment mechanism and random wandering mechanism was proposed. The parameter adjustment strategy based on the optimal damping ratio and the random step wandering strategy based on the Lévy-flight process were introduced into the PSO algorithm. By executing a long-step wandering operation and regulating the velocity inertial of particles with a certain probability, the PSO algorithm could get a longer step and jump out of the local optimum. The simulation results show that the proposed algorithm can plan the optimal path with low energy consumption according to the current information while effectively avoiding obstacles.
-
Key words:
- autonomous undersea vehicle /
- dynamic current /
- path planning /
- energy consumption
-
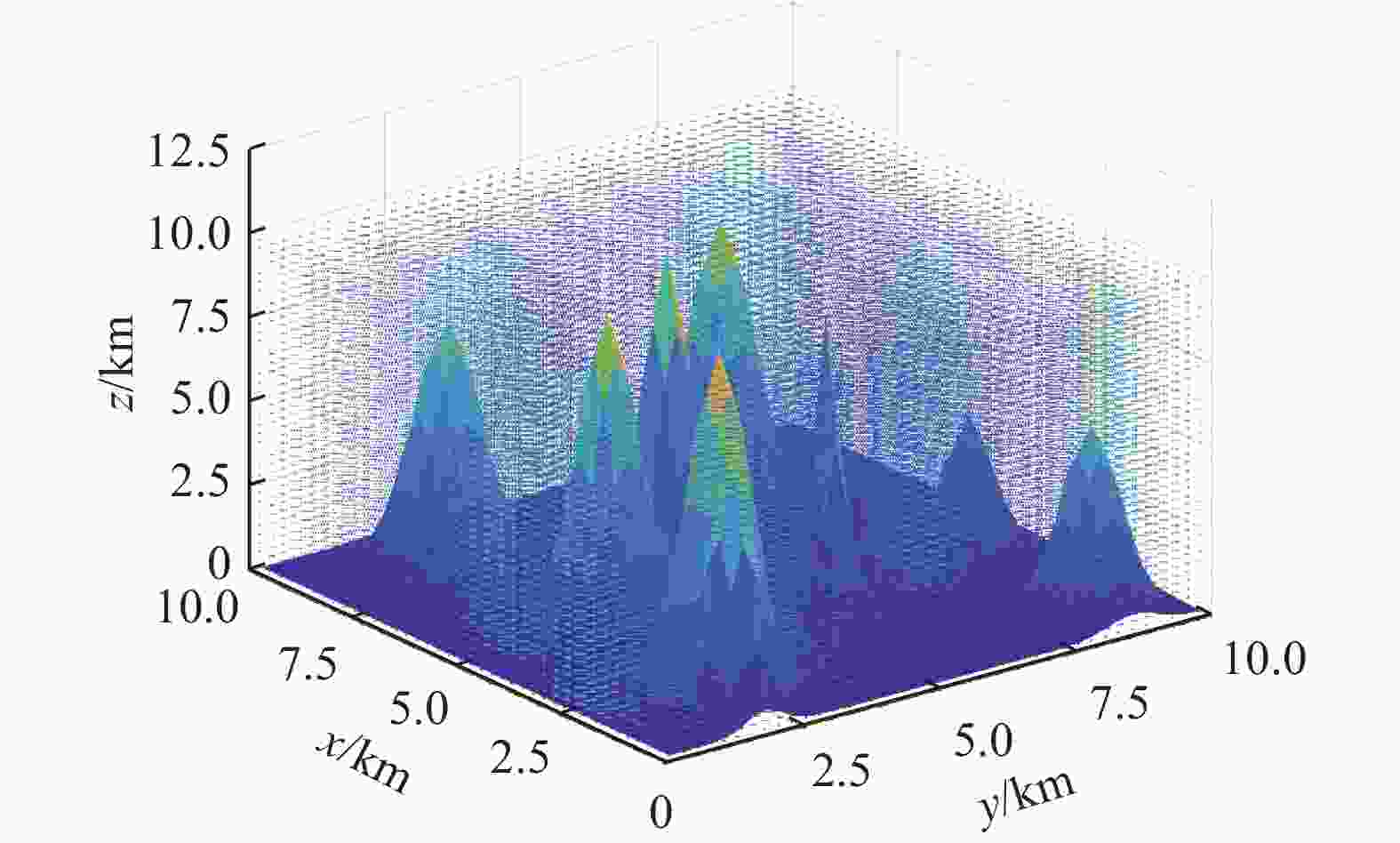
图 1 基于水下山峰障碍物和叠加Lamb涡三维环境图
Figure 1. Three-dimensional environment map based on mountain peaks and Lamb vortex
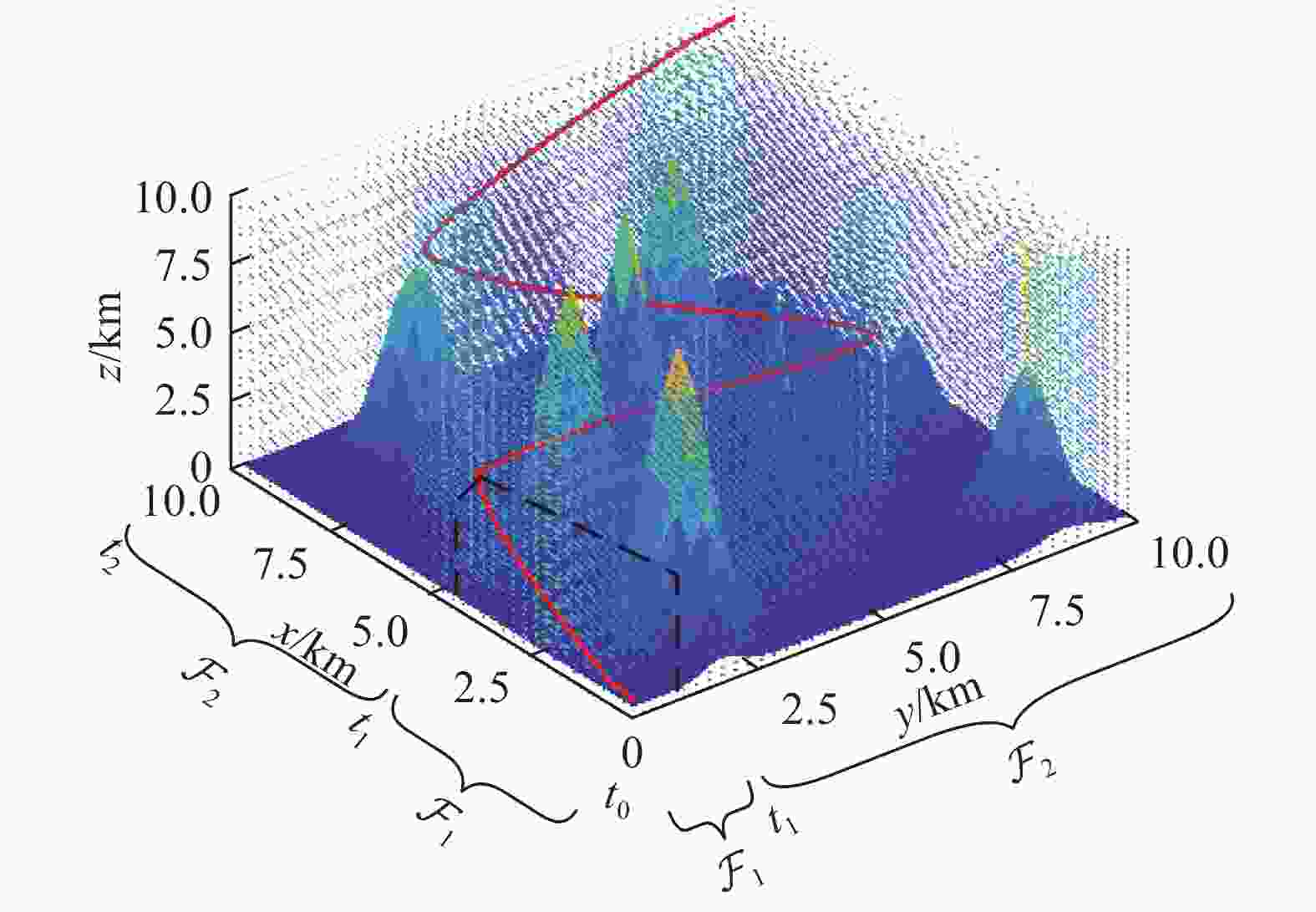
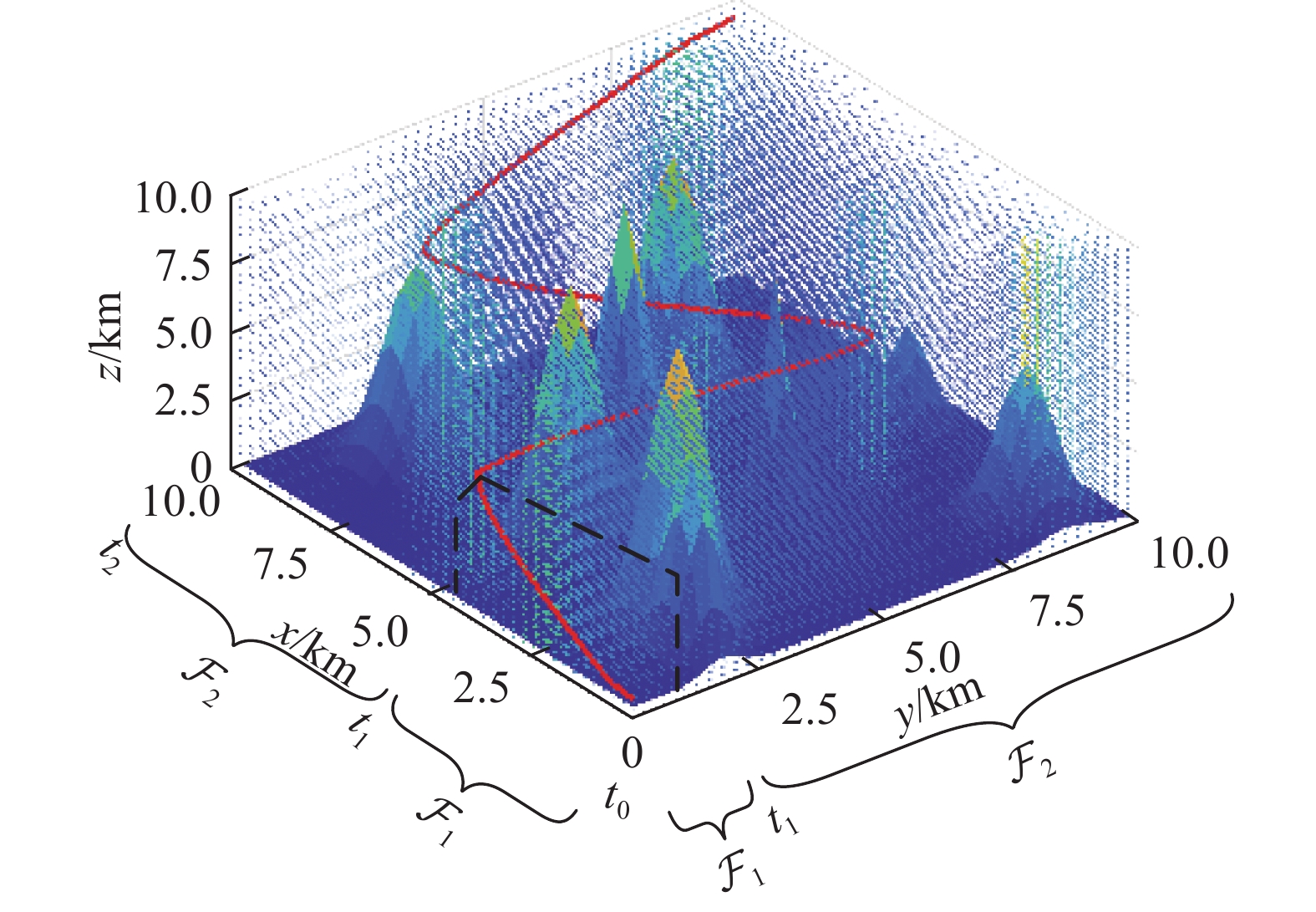
图 3 三维动态海流环境中PSO规划结果
Figure 3. Simulation results for PSO in 3D dynamic current environment
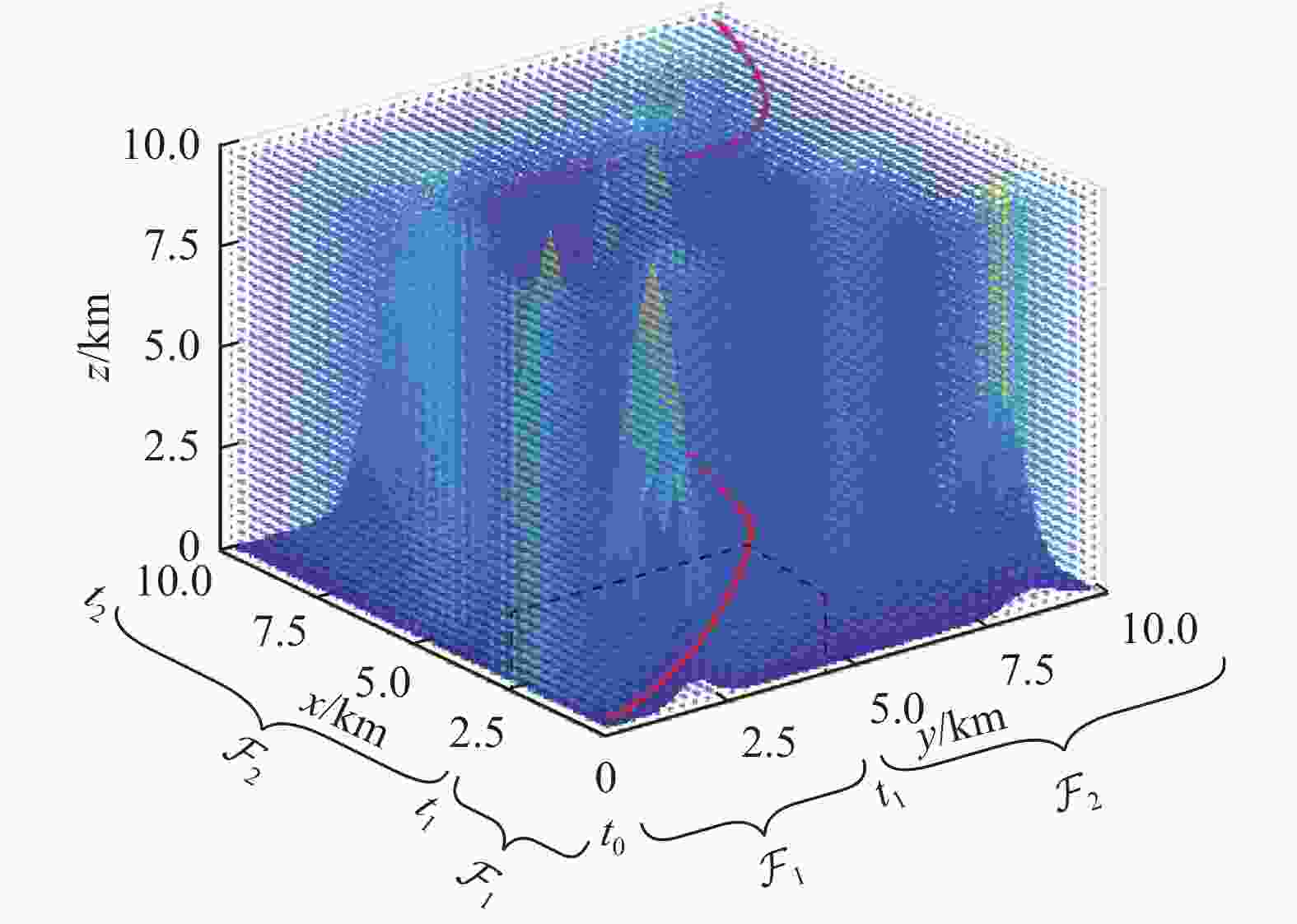
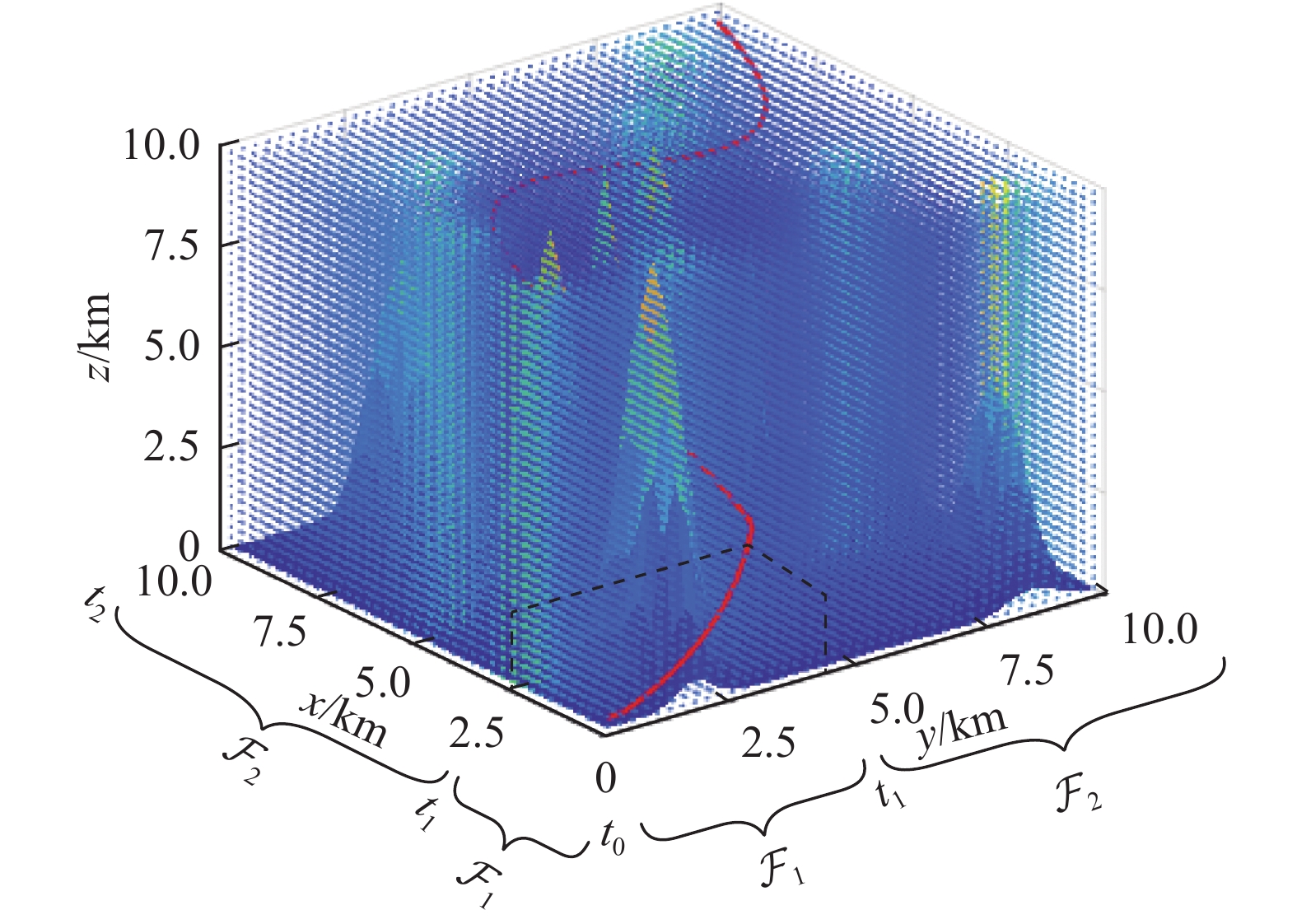
图 4 三维动态海流环境中APF-APSO规划结果
Figure 4. Simulation results for APF-APSO in 3D dynamic current environment
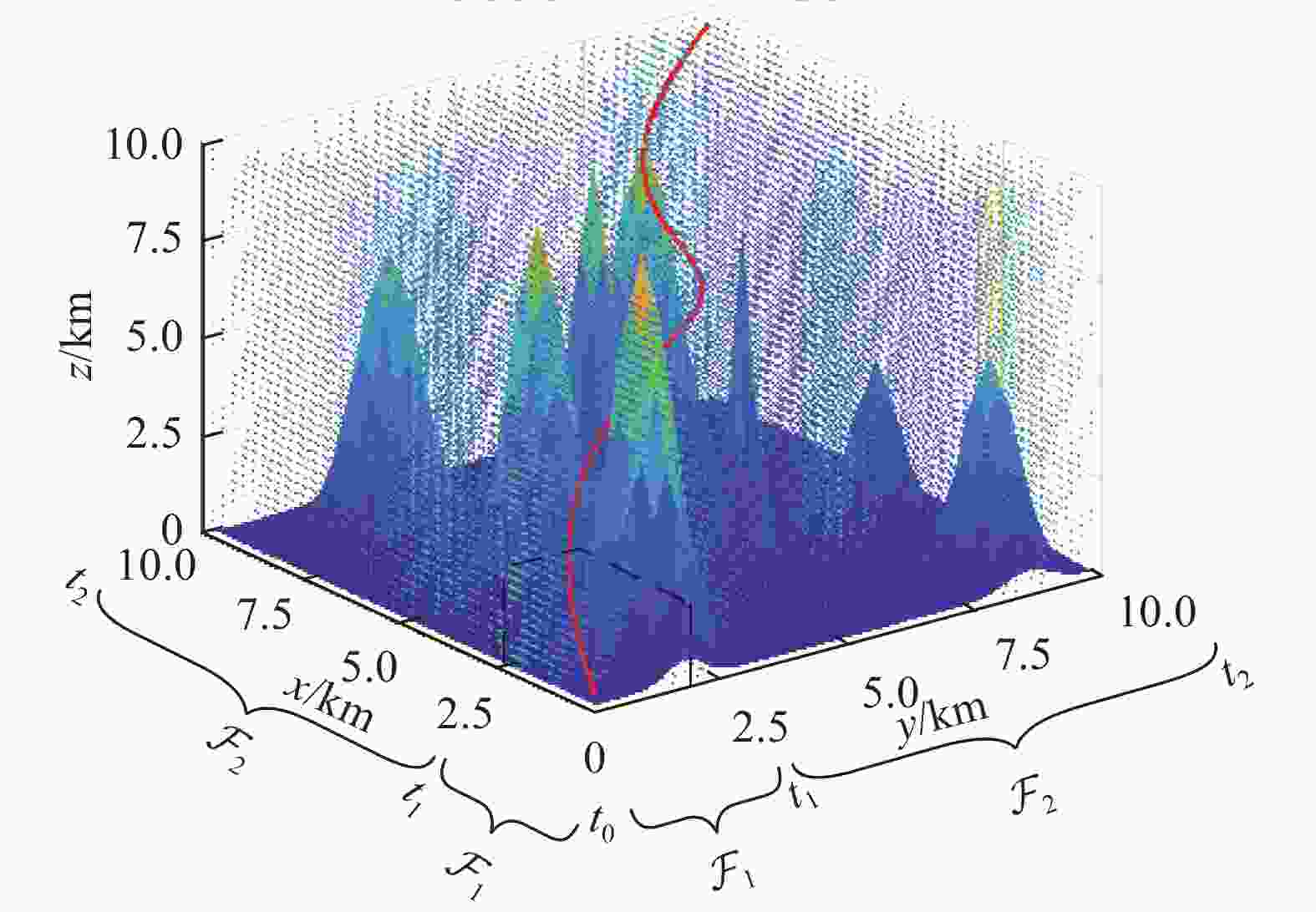
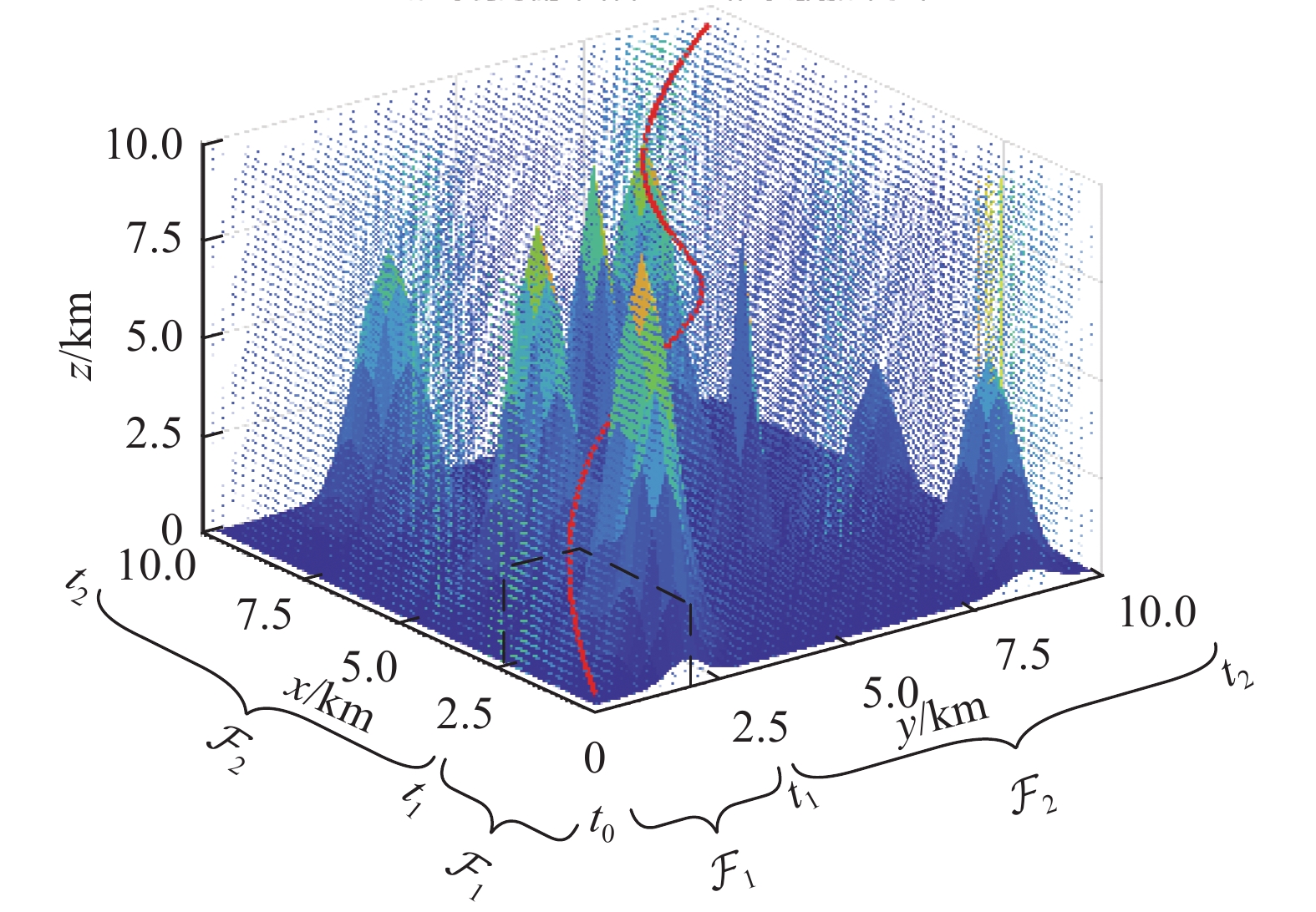
图 5 三维动态海流环境中PSO-Lévy规划结果
Figure 5. Simulation results for PSO-Lévy in 3D dynamic current environment
-
[1] Zeng Z, Lian L, Sammut K, et al. A survey on path planning for persistent autonomy of autonomous underwater vehicles[J]. Ocean Engineering, 2015, 110(A): 303-313. [2] Xu H X, Jiang C L. Heterogeneous oceanographic exploration system based on USV and AUV: A survey of developments and challenges[J]. 中国科学院大学学报, 2021, 38(2): 145-159. [3] Kularatne D, Bhattacharya S, Hsieh M A. Going with the low: A graph based approach to optimal path planning in general flows[J]. Autonomous Robots, 2018, 42(7): 1369-1387. doi: 10.1007/s10514-018-9741-6 [4] 吴正平, 唐念, 陈永亮, 等. 基于改进人工势场法的AUV路径规划[J]. 化工自动化及仪表, 2014(12): 1421-1423. doi: 10.3969/j.issn.1000-3932.2014.12.021Wu Zhengping, Tang Nian, Chen Yongliang, et al. AUV path planning based on improved artificial potential field method[J]. Control and Instruments in Chemical Industry, 2014(12): 1421-1423. doi: 10.3969/j.issn.1000-3932.2014.12.021 [5] Mao Z Y, Liu P L, Ding W J, et al. An improved genetic algorithm for optimal search path of unmanned underwater vehicles[C]//International Conference on Intelligent Robotics and Applications. Shenyang, China: Springer, Cham, 2019: 480-488. [6] Yang J C, Huo J M, Xi M. A time-saving path planning scheme for autonomous underwater vehicles with complex underwater conditions[J]. IEEE Internet of Things Journal, 2023, 10(2): 1001-1013. doi: 10.1109/JIOT.2022.3205685 [7] Witt J, Dunbabin M. Go with the flow: Optimal AUV path planning in coastal environments[C]//Proceedings of the 2008 Australasian Conference on Robotics & Automation. Canberra: ARAA, 2009: 1-9. [8] 刘晨霞, 朱大奇, 周蓓, 等. 海流环境下多AUV多目标生物启发任务分配与路径规划算法[J]. 控制理论与应用, 2022, 39(11): 2100-2107. doi: 10.7641/CTA.2022.11019Liu Chenxia, Zhu Daqi, Zhou Bei, et al. A novel algorithm of multi-AUVs task assignment and path planning based on biologically inspired neural network for ocean current environment[J]. Control Theory & Applications, 2022, 39(11): 2100-2107. doi: 10.7641/CTA.2022.11019 [9] Lan W, Jin X, Wang T, et al. Improved RRT algorithms to solve path planning of multi-glider in time-varying ocean currents[J]. IEEE Access, 2021, 9: 158098-158115. doi: 10.1109/ACCESS.2021.3130367 [10] Yang J C, Ni J F, Xi M, et al. Intelligent path planning of underwater robot based on reinforcement learning[J]. IEEE Transactions on Automation Science and Engineering, 2023, 20(3): 1983-1996. doi: 10.1109/TASE.2022.3190901 [11] 朱大奇, 孙兵, 李利. 基于生物启发模型的 AUV 三维自主路径规划与安全避障算法[J]. 控制与决策, 2015, 30(5): 798-806.Zhu Daqi, Sun Bin, Li Li. Algorithm for AUV's 3-D path planning and safe obstacle avoidance based on biological inspired model[J]. Control and Decision, 2015, 30(5): 798-806. [12] Chu Z Z, Wang F L, Lei T J, et al. Path planning based on deep reinforcement learning for autonomous underwater vehicles under ocean current disturbance[J]. IEEE Transactions on Intelligent Vehicles, 2023, 8(1): 108-120. doi: 10.1109/TIV.2022.3153352 [13] Zhang W L, Liang S, Lu C, et al. SVF-RRT*: A stream-based VF-RRT* for USVs path planning considering ocean currents[J]. IEEE Robotics and Automation Letters, 2023, 8(4): 2413-2420. doi: 10.1109/LRA.2023.3245409 [14] Valachovic H, Yang N, Sun J. Energy-optimal path planning of autonomous underwater vehicles using adaptive flow models[C]//Oceans 2022. Hampton Roads, USA: Department of Naval Architecture and Marine Engineering, 2022: 1-6. [15] Yan Z, Zhao Y, Zhang H. A method of UUV path planning with biased extension in ocean flows[C]//Proceedings of the 10th World Congress on Intelligent Control and Automation. Beijing, China: IEEE, 2012: 532-537. [16] Pan X, Wu X, Hou X. Research on global path planning for autonomous underwater vehicle considering ocean current[C]//2018 2nd IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference(IMCEC). Xi’an, China: IEEE, 2018: 790-793. [17] 赵玉花, 石永康. 改进粒子群算法的多无人机航迹优化[J]. 电光与控制, 2023, 30(5): 29-33, 51. doi: 10.3969/j.issn.1671-637X.2023.05.006Zhao Yuhua, Shi Yongkang. Improved particle swarm optimization algorithm for multi-UAV flight path planning[J]. Electronics Optics & Control, 2023, 30(5): 29-33, 51. doi: 10.3969/j.issn.1671-637X.2023.05.006 [18] 王学武, 严益鑫, 丁冬雁, 等. 基于Lévy-PSO算法的焊接机器人避障路径规划[J]. 上海交通大学学报, 2016, 50(10): 1517-1520,1525.Wang Xuewu, Yan Yixin, Ding Dongyan, et al. Collision free path planning for welding robot based on Lévy-PSO[J]. Journal of Shanghai Jiaotong University, 2016, 50(10): 1517-1520,1525. [19] Zeng Z, Sammut K, Lian L, et al. A comparison of optimization techniques for AUV path planning in environments with ocean currents[J]. Robotics and Autonomous Systems, 2016, 82: 61-72. doi: 10.1016/j.robot.2016.03.011 [20] 黄书召, 田军委, 乔路, 等. 基于改进遗传算法的无人机路径规划[J]. 计算机应用, 2021, 41(2): 390-397. doi: 10.11772/j.issn.1001-9081.2020060797Huang Shuzhao, Tian Junwei, Qiao Lu, et al. Unmanned aerial vehicle path planning based on improved genetic algorithm[J]. Journal of Computer Applications, 2021, 41(2): 390-397. doi: 10.11772/j.issn.1001-9081.2020060797 [21] Jones D, Hollinger G A. Planning energy-efficient trajectories in strong disturbances[J]. IEEE Robotics and Automation Letters, 2017, 2(4): 2080-2087. doi: 10.1109/LRA.2017.2719760 [22] Øystein S, Petter N, Martin L. Trajectory planning for navigation aiding of autonomous underwater vehicles[J] IEEE Access, 2020, 8: 116586-116604. [23] Wang Q Y, Zhou D, Yin S, et al. Improved adaptive inertia and damping coefficient control strategy of VSG based on optimal damping ratio[C]//2022 International Power Electronics Conference (IPEC-Himeji 2022-ECCE Asia). Himeji, Japan: IEEE, 2022: 102-107. [24] 刘鹏. 声呐区域探测效能评估技术研究[J]. 声学与电子工程, 2021(3): 8-11. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 791
- HTML全文浏览量: 294
- PDF下载量: 114
- 被引次数: 0





