

Review of Visual Control Technology for Undersea Vehicles
-
摘要: 视觉控制是通过视觉信息进行环境和自身状态感知的一种控制方式, 文中将该技术应用于水下航行器控制, 并对不同应用场景下的相关研究进展、难点与趋势进行分析。首先介绍水下航行器视觉控制技术发展现状与任务场景, 然后对水下图像增强、目标识别与位姿估计技术进行介绍, 并从水下视觉动力定位与目标跟踪、水下航行器对接及水下目标抓取作业等3个任务场景, 对水下航行器视觉控制技术发展现状进行总结和分析, 最后梳理了水下航行器视觉控制技术的难点与发展趋势。Abstract: Visual control is a control method that utilizes visual information for environmental and self-state awareness. In this paper, this technology was applied to control undersea vehicles, and relevant research progress, challenges, and trends in different application scenarios were analyzed. The current development and task scenarios of visual control technology for undersea vehicles were first introduced, mainly focusing on underwater image enhancement, target recognition, and pose estimation technologies. The current development of visual control technology for undersea vehicles was then summarized and analyzed based on three task scenarios: underwater visual dynamic positioning and target tracking, undersea vehicle docking, and underwater operational tasks such as target grasping. Finally, the challenges and development trends of visual control technology for undersea vehicles were outlined.
-
Key words:
- undersea vehicle /
- underwater vision /
- visual control
-

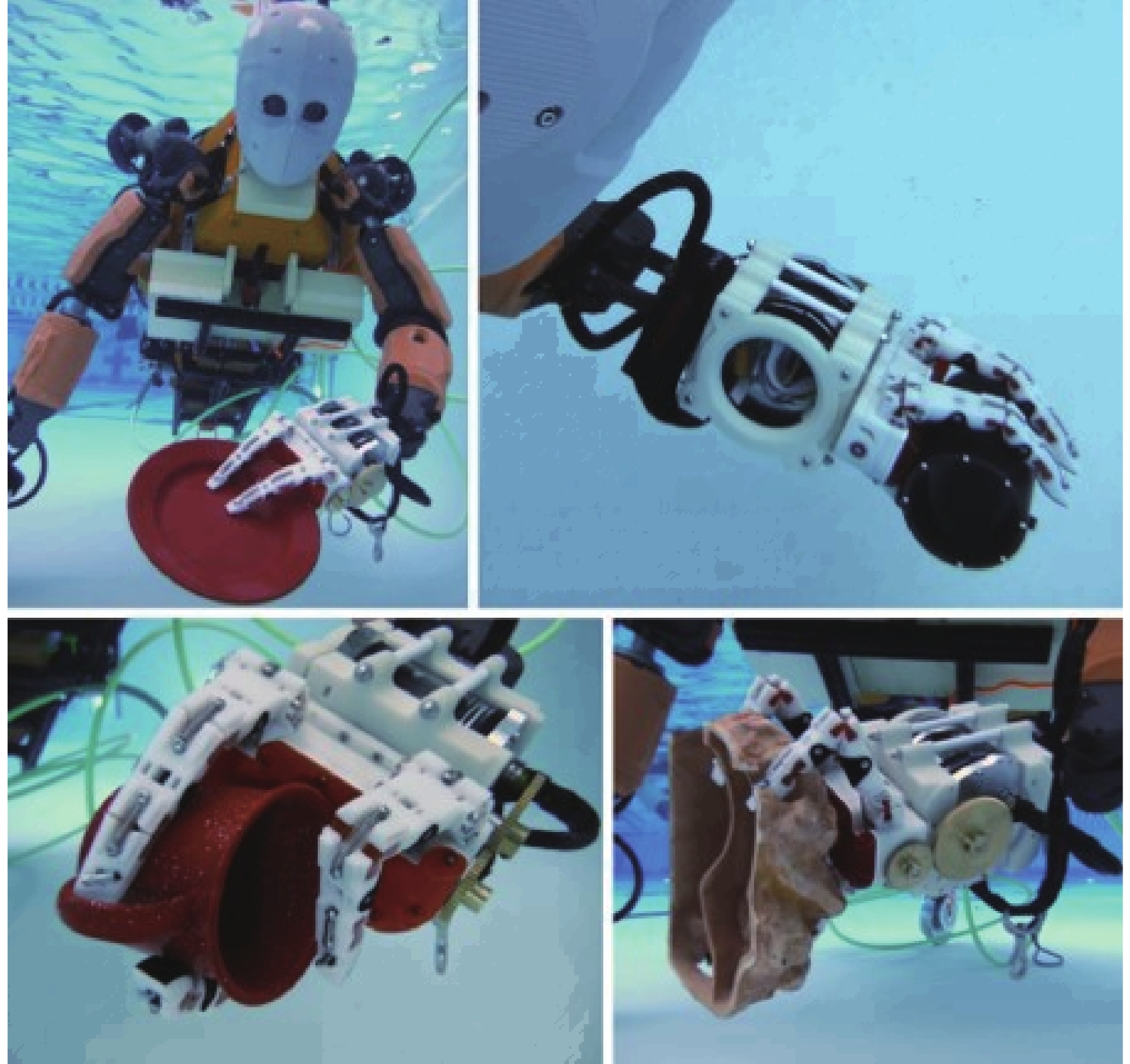
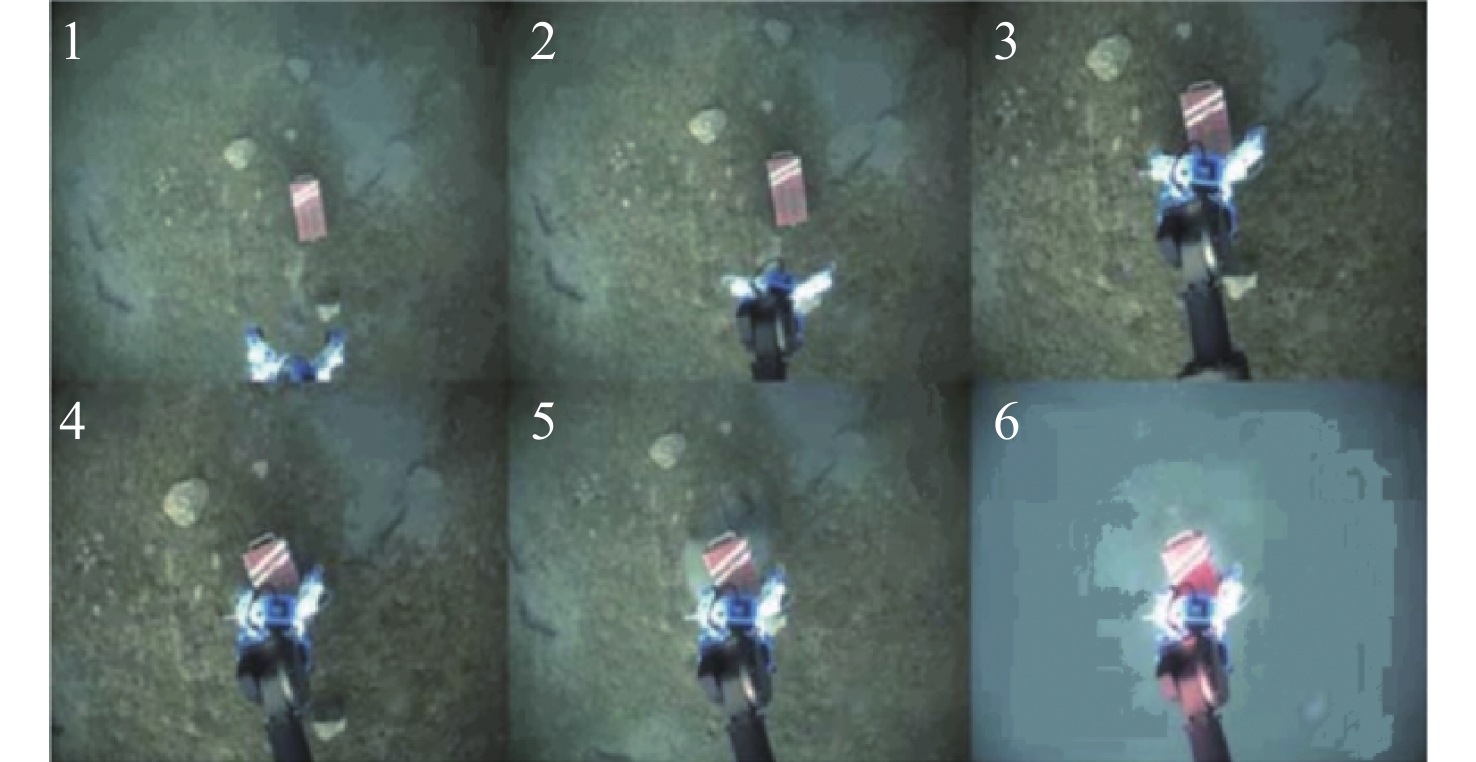
图 2 视觉与机械臂抓取协调控制试验场景
Figure 2. Experimental scenario of coordinated control of vision and manipulator grasping
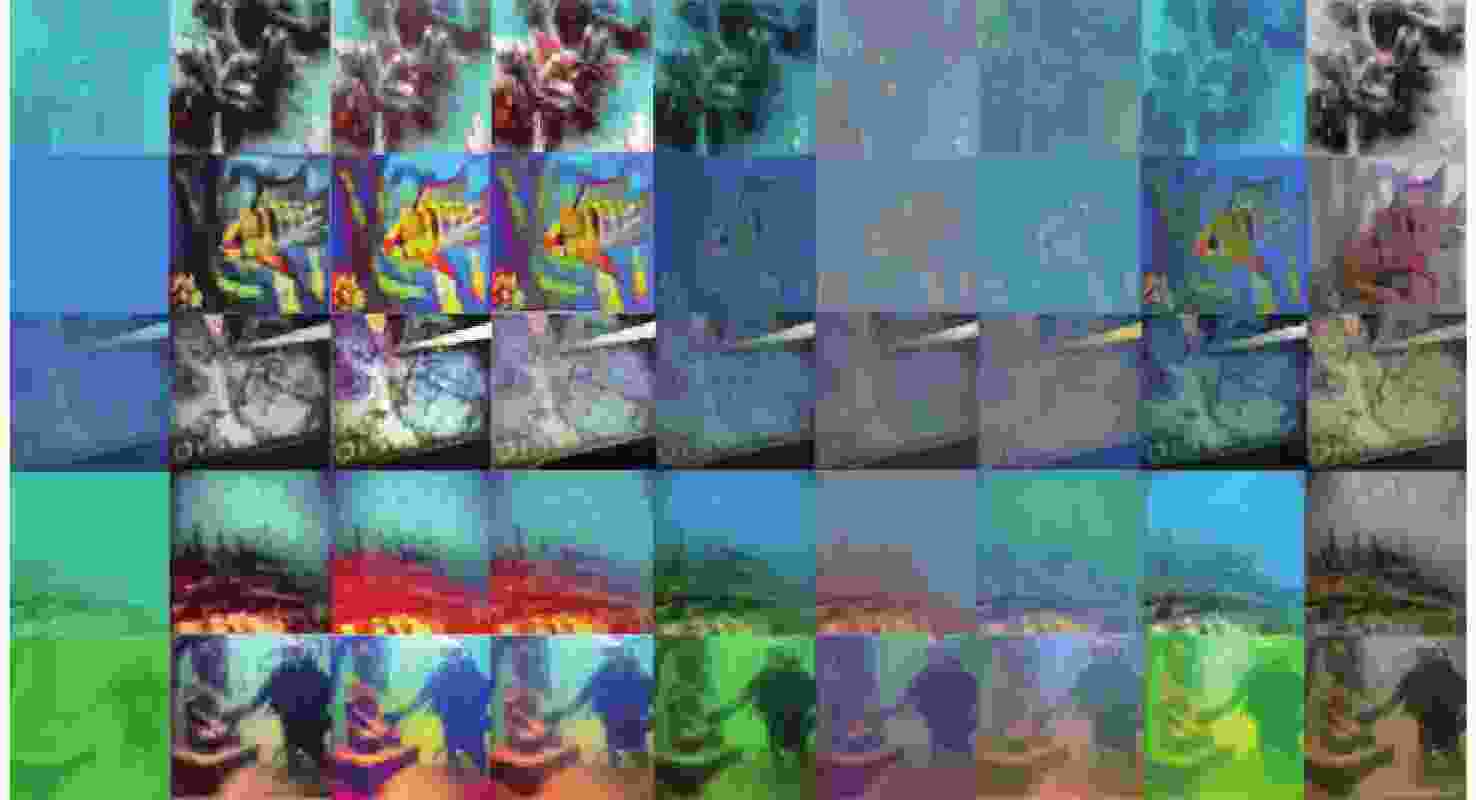
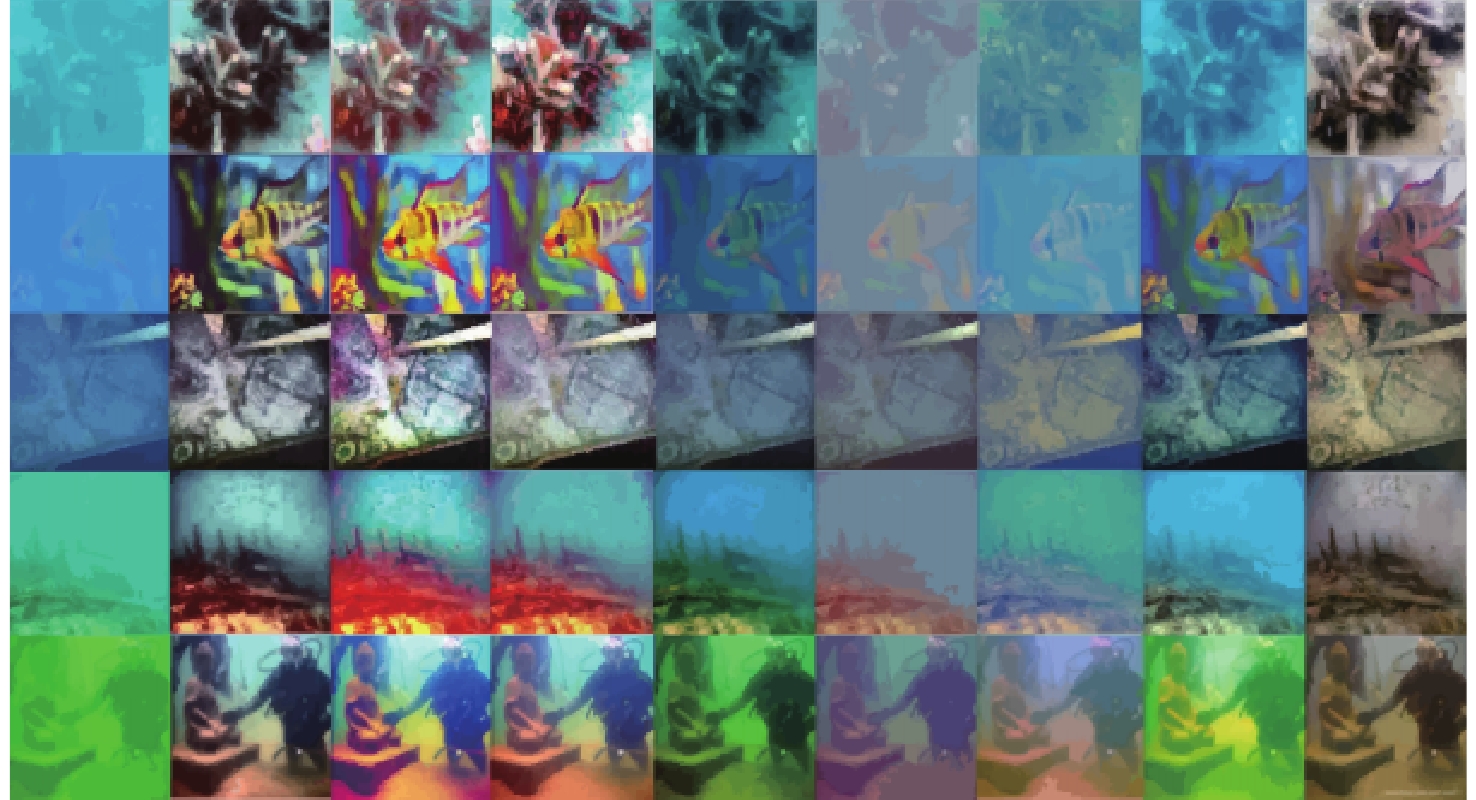
图 3 水下图像增强与复原效果对比
Figure 3. Comparison of underwater visual image enhancement and restoration effects

图 5 FORSSEA航行器视觉动力定位过程
Figure 5. Visual dynamic positioning of FORSSEA undersea vehicle
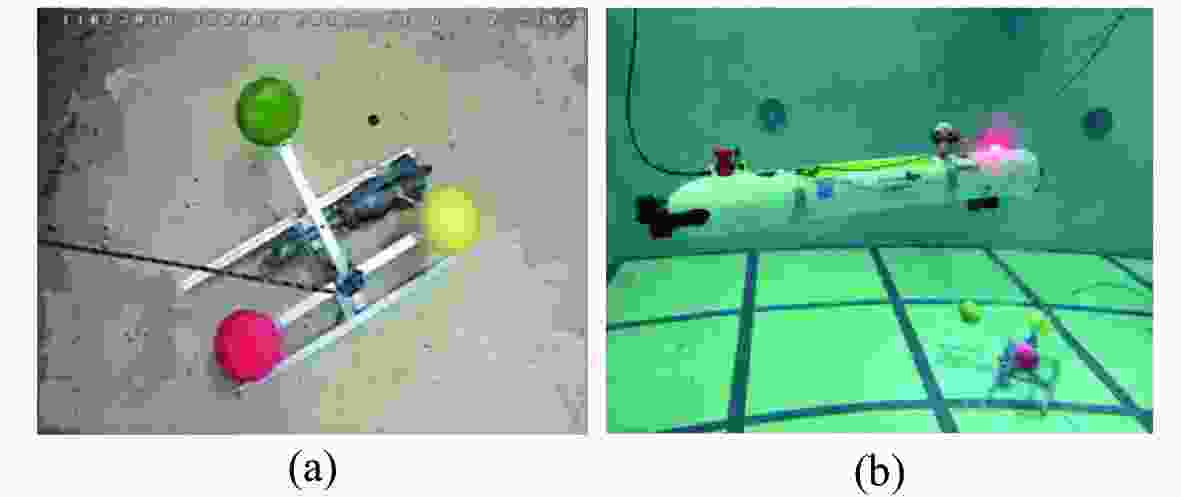
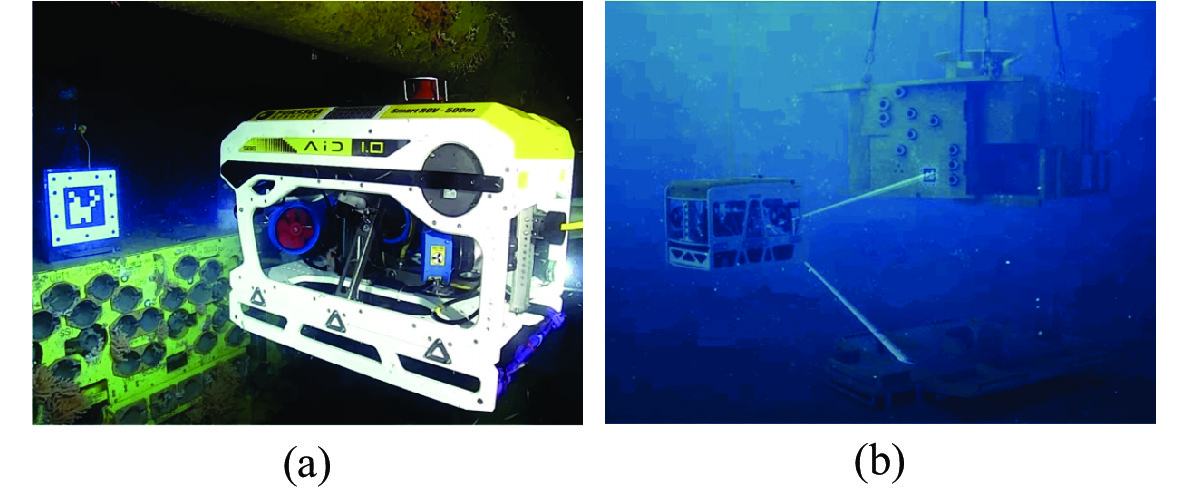
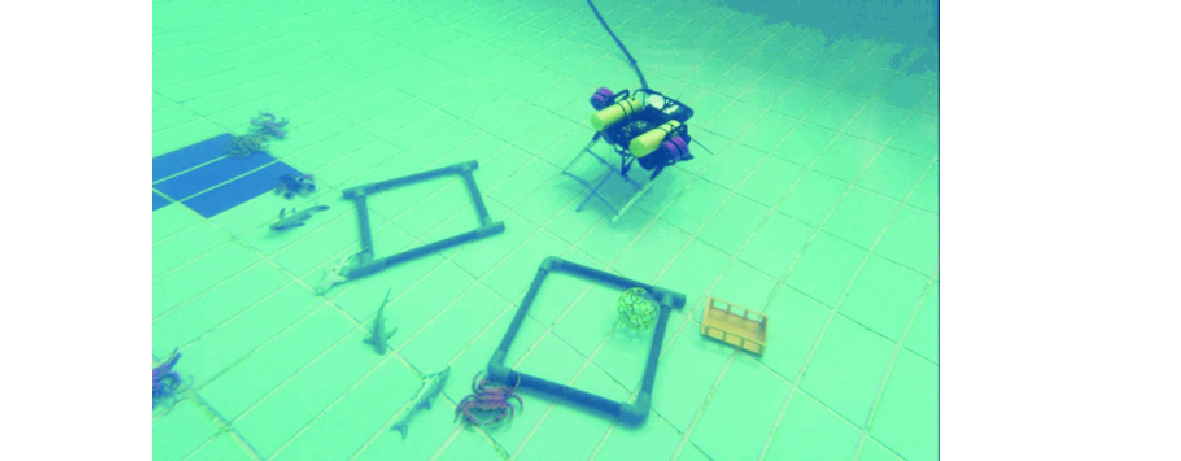
图 6 水下航行器动力定位实验场景
Figure 6. Experiment scenario of undersea vehicle dynamic positioning

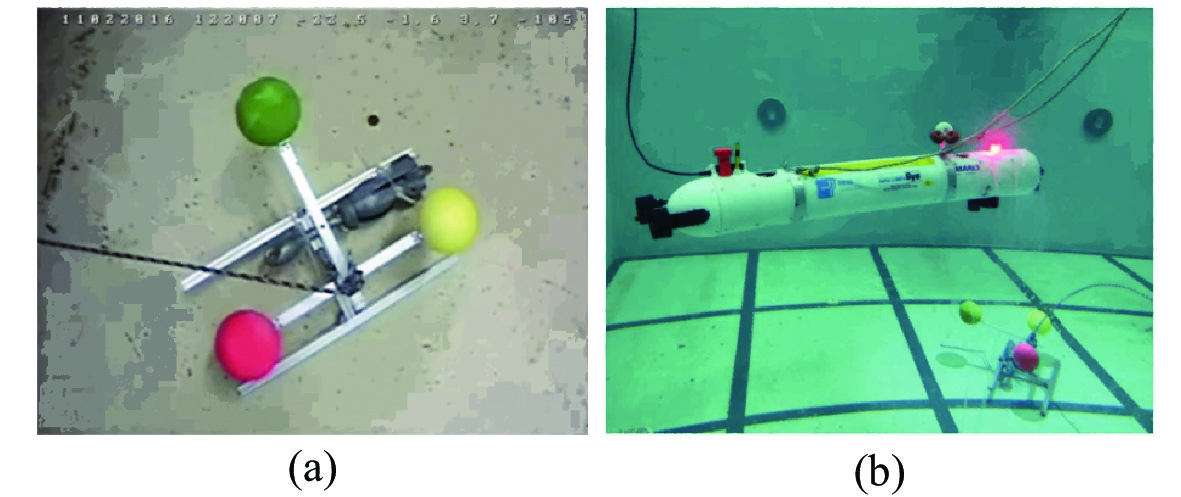
图 7 西北工业大学水下航行器动力定位试验场景
Figure 7. Dynamic positioning scenario of undersea vehicles at Northwestern Polytechnical University
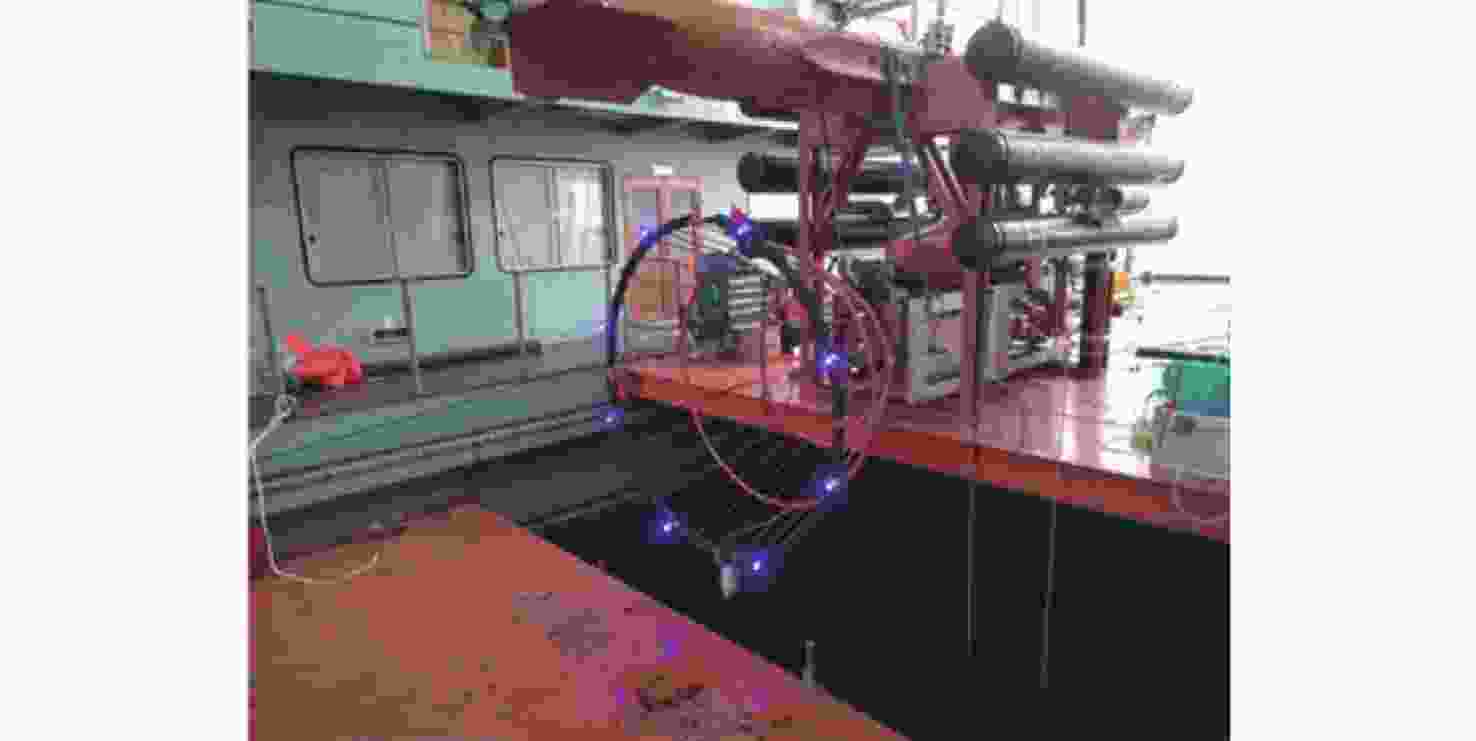
图 9 中国科学院沈阳自动化研究所航行器水下对接装置
Figure 9. Underwater docking device of Shenyang Institute of Automation Chinese Academy of Sciences

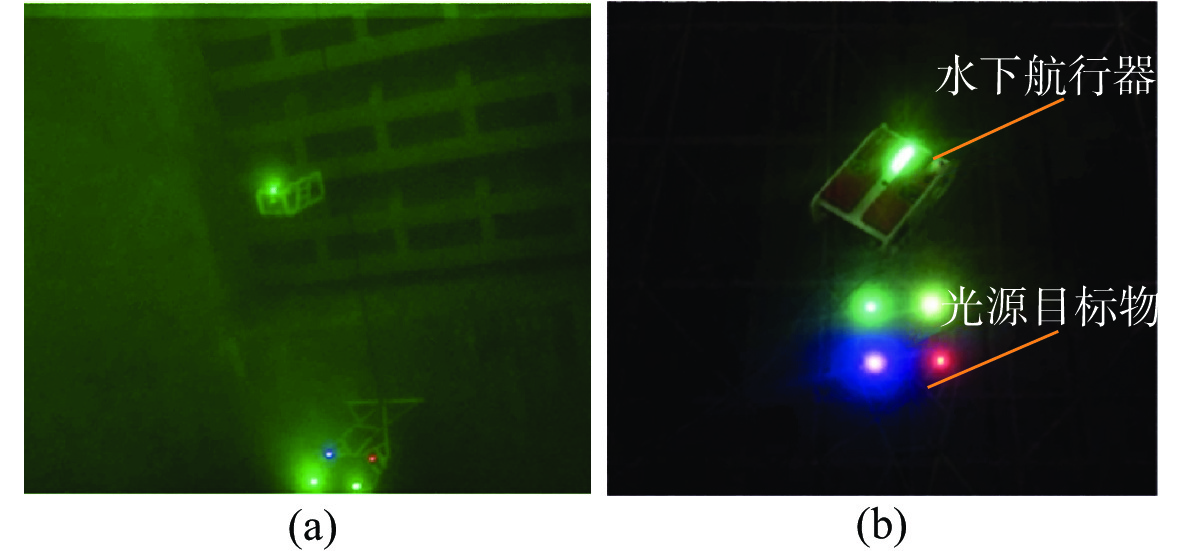
图 10 西北工业大学水池对接实验场景
Figure 10. Experimental scenario of pool docking of North- western Polytechnical University
-
[1] 邱志明, 马焱, 孟祥尧, 等. 水下无人装备前沿发展趋势与关键技术分析[J]. 水下无人系统学报, 2023, 31(1): 1-9.Qiu Zhiming, Ma Yan, Meng Xiangyao, et al. Analysis on the development trend and key technologies of unmanned underwater equipment[J]. Journal of Unmanned Undersea Systems, 2023, 31(1): 1-9. [2] 张伟, 潘珺, 宫鹏, 等. 面向UUV回收过程的单目视觉导引灯阵跟踪方法[J]. 水下无人系统学报, 2021, 29(4): 435-441.Zhang Wei, Pan Jun, Gong Peng, et al. Monocular vision guided lamp array tracking method for the UUV recovery process[J]. Journal of Unmanned Undersea Systems, 2021, 29(4): 435-441. [3] 北林团子. 瑞典使用水下无人机 (ROV) 拍摄北溪天然气管道爆炸现场[EB/OL]. (2022-10-18) [2023-4-29]. https://www.bilibili.com/video/BV1Lm4y1P7H6/ [4] Brantner G, Khatib O. Controlling ocean one: Human–robot collaboration for deep-sea manipulation[J]. Journal of Field Robotics, 2021, 38(1): 28-51. [5] 高剑, 张福斌. 无人水下航行器控制系统——建模、算法设计与开发[M]. 西安: 西北工业大学出版社, 2018. [6] 孙叶义, 武皓微, 李晔, 等. 智能无人水下航行器水下回收对接技术综述[J]. 哈尔滨工程大学学报, 2019, 40(1): 5-15.Sun Yeyi, Wu Haowei, Li Ye, et al. Summary of AUV underwater recycle docking technology[J]. Journal of Harbin Engineering University, 2019, 40(1): 5-15. [7] 胡瀚文, 王猛, 程卫平, 等. 水下视觉SLAM的图像滤波除尘与特征增强算法[J]. 机器人, 2023, 45(2): 197-206.Hu Hanwen, Wang Meng, Cheng Weiping, et al. An image dust-filtering and feature enhancement algorithm for underwater visual SLAM[J]. Robot, 2023, 45(2): 197-206. [8] 郭继昌, 李重仪, 郭春乐, 等. 水下图像增强和复原方法研究进展[J]. 中国图象图形学报, 2017, 22(3): 273-287.Guo Jichang, Li Chongyi, Guo Chunle, et al. Research progress of underwater image enhancement and restoration methods[J]. Journal of Image and Graphics, 2017, 22(3): 273-287. [9] 奔粤阳, 汤瑞, 戴平安, 等. 基于加权融合的水下视觉图像增强算法[EB/OL]. (2022-9-14)[2023-4-29]. https://doi.org/10.13700/j.bh.1001-5965.2022.0540.Ben Yueyang, Tang Rui, Dai Pingan, et al. Image enhancement algorithm for underwater vision based on weighted fusion[EB/OL]. (2022-9-14) [2023-4-29]. https://doi.org/10.13700/j.bh.1001-5965.2022.0540. [10] 丛晓峰, 桂杰, 章军. 基于视觉Transformer的多损失融合水下图像增强网络[J]. 智能科学与技术学报, 2022, 4(4): 522-532.Cong Xiaofeng, Gui Jie, Zhang Jun. Underwater image enhancement network based on visual transformer with multiple loss functions fusion[J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(4): 522-532. [11] Li C Y, Guo C L, Ren W Q, et al. An underwater image enhancement benchmark dataset and beyond[J]. IEEE Transactions on Image Processing, 2020, 29: 4376-4389. doi: 10.1109/TIP.2019.2955241 [12] Moghimi M K, Mohanna F. Real-time underwater image enhancement: A systematic review[J]. Journal of Real-Time Image Processing, 2021: 1-17. [13] 刘皓轩, 林珊玲, 林志贤, 等. 基于GAN的轻量级水下图像增强网络[J]. 液晶与显示, 2023, 38(3): 378-386. doi: 10.37188/CJLCD.2022-0212Liu Haoxuan, Lin Shanling, Lin Zhixian, et al. Lightweight underwater image enhancement network based on GAN[J]. Chinese Journal of Liquid Crystals and Displays, 2023, 38(3): 378-386. doi: 10.37188/CJLCD.2022-0212 [14] 石丹, 李庆武, 范新南, 等. 基于Contourlet变换和多尺度Rentinex的水下图像增强算法[J]. 激光与光电子学进展, 2010, 47(4): 41-45.Shi Dan, Li Qingwu, Fan Xinnan, et al. Underwater image enhancement algorithm based on contourlet transform and nulti-scale Retinex[J]. Laser & Optoelectronics Progress, 2010, 47(4): 41-45. [15] 许丽, 陆桂明, 邱贞光. 结合细节信息的自适应Retinex算法水下图像增强[J]. 计算机工程与应用, 2022, 58(11): 224-233.Xu Li, Lu Guiming, Qiu Zhenguang. Adaptive Retinex algorithm based on detail selection used in underwater image enhancement[J]. Computer Engineering and Applications, 2022, 58(11): 224-233. [16] 张彩珍, 康斌龙, 李颖, 等. 基于差异通道增益及改进Retinex的水下图像增强[J]. 激光与光电子学进展, 2021, 58(14): 156-163.Zhang Caizhen, Kang Binlong, Li Ying, et al. Underwater image enhancement based on differential channel gainand improved Retinex[J]. Laser & Optoelectronics Progress, 2021, 58(14): 156-163. [17] 金维维, 华臻, 冯巍巍, 等. 基于改进多尺度Retinex的水下图像增强研究[J]. 计算机应用与软件, 2021, 38(9): 239-243, 255.Jin Weiwei, Hua Zhen, Feng Weiwei, et al. Research on underwater image enhancement based on improved multi-scale Retinex[J]. Computer Applications and Software, 2021, 38(9): 239-243, 255. [18] 田宁, 程莉, 元海文, 等. 基于Retinex模型的水下图像增强方法[J]. 中国科技论文, 2022, 17(11): 1281-1288.Tian Ning, Cheng Li, Yuan Haiwen, et al. Underwater image enhancement method based on Retinex model[J]. China Sciencepaper, 2022, 17(11): 1281-1288. [19] 杨福豪, 史启超, 蓝方鸣, 等. 基于色彩衰减补偿和Retinex的水下图像增强[J]. 宁波大学学报(理工版), 2020, 33(1): 58-64. [20] Cai X W, Jiang N F, Chen W L, et al. CURE-Net: A cascaded deep network for underwater image enhancement[J]. IEEE Journal of Oceanic Engineering, 2024, 49(1): 226-236. [21] 李耀, 于腾, 杨国为. 基于BcGAN的水下图像增强方法[J]. 计算机工程与设计, 2022, 43(11): 3195-3201.Li Yao, Yu Teng, Yang Guowei. Underwater image enhancement method based on BcGAN[J]. Computer Engineering and Design, 2022, 43(11): 3195-3201. [22] 李钰, 杨道勇, 刘玲亚, 等. 利用生成对抗网络实现水下图像增强[J]. 上海交通大学学报, 2022, 56(2): 134-142.Li Yu, Yang Daoyong, Liu Lingya, et al. Underwater image enhancement based on generative adversarial networks[J]. Journal of Shanghai Jiaotong University, 2022, 56(2): 134-142. [23] 李庆忠, 白文秀, 牛炯. 基于改进CycleGAN的水下图像颜色校正与增强[J]. 自动化学报, 2023, 49(4): 820-829.Li Qingzhong, Bai Wenxiu, Niu Jiong. Underwater image color correction and enhancement based on improved Cycle-consistent Generative Adversarial Networks[J]. Acta Automatica Sinica, 2023, 49(4): 820-829. [24] 林森, 刘旭. 门控融合对抗网络的水下图像增强[J]. 图学学报, 2021, 42(6): 948-956.Lin Sen, Liu Xu. Underwater image enhancement algorithm using gated fusion generative adversarial network[J]. Journal of Graphics, 2021, 42(6): 948-956. [25] 李耀, 于腾, 祁少华, 等. 基于CGAN的自适应密集特征融合水下图像增强算法[J]. 微电子学与计算机, 2021, 38(12): 31-38.Li Yao, Yu Teng, Qi Shaohua, et al. Adaptived dense feature fusion underwater image enhancement algorithm based on CGAN[J]. Microelectronics & Computer, 2021, 38(12): 31-38. [26] 晋玮佩, 郭继昌, 祁清. 基于条件生成对抗网络的水下图像增强[J]. 激光与光电子学进展, 2020, 57(14): 33-44.Jin Weipei, Guo Jichang, Qi Qing. Underwater image enhancement based on conditional generative adversarial network[J]. Laser & Optoelectronics Progress, 2020, 57(14): 33-44. [27] 林森, 刘世本, 唐延东. 多输入融合对抗网络的水下图像增强[J]. 红外与激光工程, 2020, 49(5): 217-225.Lin Sen, Liu Shiben, Tang Yandong. Multi-input fusion adversarial network for underwater image enhancement[J]. Infrared and Laser Engineering, 2020, 49(5): 217-225. [28] 方明, 刘小晗, 付飞蚺. 基于注意力的多尺度水下图像增强网络[J]. 电子与信息学报, 2021, 43(12): 3513-3521.Fang Ming, Liu Xiaohan, Fu Feiran. Multi-scale underwater image enhancement network based on attention mechanism[J]. Journal of Electronics & Information Technology, 2021, 43(12): 3513-3521. [29] 肖鹏, 王红茹. 一种用于局部低照度水下图像的自适应增强方法[J]. 激光杂志, 2022, 43(4): 114-119.Xiao Peng, Wang Hongru. An adaptive enhancement method for underwater images with local low illumination[J]. Laser Journal, 2022, 43(4): 114-119. [30] Shi Y L, Gao Z R, Li S. Real-time detection algorithm of marine organisms based on improved YOLOv4-Tiny[J]. IEEE Access, 2022, 10: 131361-131373. doi: 10.1109/ACCESS.2022.3226886 [31] Moghimi M K, Mohanna F. Reliable object recognition using deep transfer learning for marine transportation systems with underwater surveillance[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(2): 2515-2524. [32] Sobolev A S, Chernyi S G, Krivoguz D O, et al. Convolution neural network for identification of underwater objects[C]//2022 Conference of Russian Young Researchers in Electrical and Electronic Engineering (ElConRus). Saint Petersburg, Russian: IEEE, 2022: 455-458. [33] Tian M J, Li X L, Kong S H, et al. A modified YOLOv4 detection method for a vision-based underwater garbage cleaning robot[J]. Frontiers of Information Technology & Electronic Engineering, 2022, 23(8): 1217-1228. [34] Zhang J, Peng X H, Zhang G Y. Using improved YOLOX for underwater object recognition[C]//2022 5th International Conference on Pattern Recognition and Artificial Intelligence(PRAI). Chengdu, China: IEEE, 2022: 388-393. [35] Jian M W, Liu X Y, Luo H J, et al. Underwater image processing and analysis: A review[J]. Signal Processing: Image Communication, 2021, 91: 116088. doi: 10.1016/j.image.2020.116088 [36] Zhou J Y, Xu T, Guo W T, et al. Underwater occlusion object recognition with fusion of significant environmental features[J]. Journal of Electronic Imaging, 2022, 31(2): 023016. [37] Rusli M A, Sari S, Taujuddin N S A M, et al. Contrast enhanced object recognition (CLAHE_YOLOv3) technique for clear and medium level turbidity lake underwater images[J]. Evolution in Electrical and Electronic Engineering, 2022, 3(2): 8-14. [38] 陆地, 陈伟, 魏庆宇. 基于多深度对抗网络的ROV水下目标检测[J]. 计算机时代, 2023(4): 5-10.Lu Di, Chen Wei, Wei Qingyu. Underwater image enhancement based on multi-scale adversarial network[J]. Computer Era, 2023(4): 5-10. [39] Ma Z W, Li H J, Wang Z H, et al. An underwater image semantic segmentation method focusing on boundaries and a real underwater scene semantic segmentation dataset[J/OL]. ArXivPreprint(2021-08-26)[2023-6-20]. https://arxiv.org/abs/2108.11727. [40] 王非, 王欣宇, 周景春, 等. 一种基于YOLOv3的水下声呐图像目标检测方法[J]. 电子与信息学报, 2022, 44(10): 3419-3426.Wang Fei, Wang Xinyu, Zhou Jingchun, et al. An underwater object detection method for sonar image based on YOLOv3 model[J]. Journal of Electronics & Information Technology, 2022, 44(10): 3419-3426. [41] Ghosh S, Ray R, Vadali S R K, et al. Reliable pose estimation of underwater dock using single camera: a scene invariant approach[J]. Machine Vision and Applications, 2016, 27: 221-236. doi: 10.1007/s00138-015-0736-4 [42] Lwin K N, Mukada N, Myint M, et al. Visual docking against bubble noise with 3-D perception using dual-eye cameras[J]. IEEE Journal of Oceanic Engineering, 2018, 45(1): 247-270. [43] Li Y L, Liu W D, Li L, et al. Vision-based target detection and positioning approach for underwater robots[J]. IEEE Photonics Journal, 2022, 15(1): 1-12. [44] Sapienza D, Govi E, Aldhaheri S, et al. Model-based underwater 6D pose estimation from RGB[J/OL]. ArXiv Preprint(2023-09-15)[2023-09-20]. https://arxiv.org/abs/2302.06821. [45] 张淏酥, 王涛, 苗建明, 等. 水下无人航行器的研究现状与展望[J]. 计算机测量与控制, 2023, 31(2): 1-7, 40.Zhang Haosu, Wang Tao, Miao Jianming, et al. Research status and prospect of underwater unmanned vehicles[J]. Computer Measurement & Control, 2023, 31(2): 1-7, 40. [46] Ghosh S, Ray R, Vadali S R K, et al. Reliable pose estimation of underwater dock using single camera: A scene invariant approach[J]. Machine Vision & Applications, 2016, 27(2): 221-236. [47] 蔡迎波, 李德彪. 基于单目视觉的AUV水下定位方法[J]. 中国惯性技术学报, 2015, 23(4): 489-492.Cai Yingbo, Li Debiao. AUV underwater positioning method based on monocular-vision[J]. Journal of Chinese Inertial Technology, 2015, 23(4): 489-492. [48] 朱志鹏, 朱志宇. 一种基于双目视觉的水下导引光源检测和测距方法[J]. 水下无人系统学报, 2021, 29(1): 65-73.Zhu Zhipeng, Zhu zhiyu. Method for detecting and ranging an underwater guided light source based on binocular vision[J]. Journal of Unmanned Undersea Systems, 2021, 29(1): 65-73. [49] 杨翊, 周星群, 胡志强, 等. 基于视觉定位的水下机器人无通信高精度编队技术研究[J]. 数字海洋与水下攻防, 2022, 5(1): 50-58.Yang Yi, Zhou Xingqun, Hu Zhiqiang, et al. Research on high-precision unmanned underwater vehicles team formation without communication based on visual positioning technology[J]. Digital Ocean & Underwater Warfare, 2022, 5(1): 50-58. [50] Evgeny I V, Margarita V S. Visual image based dynamical positioning using control laws with multipurpose structure - ScienceDirect[J]. IFAC-Papers On Line, 2015, 48(16): 184-189. doi: 10.1016/j.ifacol.2015.10.278 [51] Vianna M L C. Real-time vision-aided inertial odometry for an AUV[D]. Brest: École Nationale Supérieure de Techniques Avancées Bretagne, 2019. [52] Tesei A, Micheli M, Vermeij A, et al. Real-time underwater positioning and navigation of an AUV in deep waters[C]//2018 OCEANS-MTS/IEEE Kobe Techno-Ocean (OTO). Kobe: IEEE, 2018: 1-7. [53] Ferrera M, Moras J, Trouve-Peloux P, et al. Real-time monocular visual odometry for turbid and dynamic underwater environments[J]. Sensors, 2019, 19(3): 687. doi: 10.3390/s19030687 [54] Nishida Y, Sonoda T, Yasukawa S, et al. Underwater platform for intelligent robotics and its application in two visual tracking systems[J]. Journal of Robotics and Mechatronics, 2018, 30(2): 238-247. doi: 10.20965/jrm.2018.p0238 [55] Gao J, Proctor A, Bradley C. Adaptive neural network visual servoing control for dynamic positioning of underwater vehicles[J]. Neurocomputing, 2015, 167: 604-613. doi: 10.1016/j.neucom.2015.04.028 [56] Gao J, Proctor A, Shi Y, et al. Hierarchical model predictive image-based visual servoing of underwater vehicles with adaptive neural network dynamic control[J]. IEEE Transactions on Cybernetics, 2015, 40(10): 2323-2334. [57] Gao J, Wu P, Yang B, et al. Adaptive neural network control for visual servoing of underwater vehicles with pose estimation[J]. Journal of Marine Science and Technology, 2017, 22(3): 470-478. doi: 10.1007/s00773-016-0426-6 [58] Figueiredo A B, Ferreira B M, Matos A C. Vision-based localization and positioning of an AUV[C]//Oceans 2016. Shanghai, China: IEEE, 2016: 1-7. [59] 杨家铭, 潘悦, 王强, 等. 水下弱目标跟踪的深度学习方法研究[J]. 兵工学报, 2024, 45(2): 385-394.Yang Jiaming, Pan Yue, Wang Qiang, et al. Research on deep learning method of underwater weak target tracking[J]. Acta Armamentarii, 2024, 45(2): 385-394. [60] 韩泽凯, 朱兴华, 韩晓军, 等. 基于卷积神经网络目标跟踪的AUV回收视觉导引算法[J]. 水下无人系统学报, 2022, 30(6): 801-808.Han Zekai, Zhu Xinghua, Han Xiaojun, et al. Visual guidance algorithm for AUV recovery based on CNN object tracking[J]. Journal of Unmanned Undersea Systems, 2022, 30(6): 801-808. [61] Sun C Y, Wan Z L, Hai H, et al. Intelligent target visual tracking and control strategy for open frame underwater vehicles[J]. Robotica, 2021, 39(10): 1791-1805. doi: 10.1017/S0263574720001502 [62] Gao J, Wu P, Li T, et al. Optimization-based model reference adaptive control for dynamic positioning of a fully actuated underwater vehicle[J]. Nonlinear Dynamics, 2017, 87(4): 1-13. [63] Gao J, An X M, Proctor A, et al. Sliding mode adaptive neural network control for hybrid visual servoing of underwater vehicles[J]. Ocean Engineering, 2017, 142: 666-675. [64] Liu J, Yan W, Gao J, et al. Hybrid vision/force control for underwater vehicles landing on unknown surfaces[J]. Ocean Engineering, 2022, 253(1): 111233. [65] Myint M, Yonemori K, Yanou A, et al. Visual servoing for underwater vehicle using dual-eyes evolutionary real-time pose tracking[J]. Journal of Robotics and Mechatronics, 2016, 28(4): 543-558. doi: 10.20965/jrm.2016.p0543 [66] Kang H J, Cho G R, Kim M, et al. Mission management technique for multi-sensor-based AUV docking[J]. Journal of Ocean Engineering and Technology, 2022, 36(3): 181-193. doi: 10.26748/KSOE.2022.001 [67] Yazdani A M, Sammut K, Yakimenko O, et al. A survey of underwater docking guidance systems[J]. Robotics and Autonomous systems, 2020, 124: 103382. doi: 10.1016/j.robot.2019.103382 [68] Ye L, Jiang Y Q, Cao J, et al. AUV docking experiments based on vision positioning using two cameras[J]. Ocean Engineering, 2015, 110: 163-173. doi: 10.1016/j.oceaneng.2015.10.015 [69] 周船, 郝颖明, 吴清潇, 等. 基于约束运动水下机器人视觉悬停研究[J]. 仪器仪表学报, 2006(S3): 1840-1843.Zhou Chuan, Hao Yingming, Wu Qingxiao, el al. Visual station keeping based on constrained motion for underwater robot[J]. Chinese Journal of Scientific Instrument, 2006(S3): 1840-1843. [70] Yahya M F , Arshad M R . Position-based visual servoing for underwater docking of an autonomous underwater vehicle[C]//2016 IEEE International Conference on Underwater System Technology: Theory and Applications (USYS). Penang, Malaysia: IEEE, 2017. [71] Huang H, Bian X Y, Cai F C, et al. A review on visual servoing for underwater vehicle manipulation systems automatic control and case study[J]. Ocean Engineering, 2022, 260: 112065. doi: 10.1016/j.oceaneng.2022.112065 [72] Liu S, Xu H, Lin Y, et al. Visual navigation for recovering an AUV by another AUV in shallow water[J]. Sensors, 2019, 19(8): 1889. doi: 10.3390/s19081889 [73] Singh P, Gregson E, Ross J, et al. Vision-based AUV docking to an underway dock using convolutional neural net-works[C]//2020 IEEE/OES Autonomous Underwater Vehicles Symposium. St. Johns, Canada: IEEE, 2020:1-6. [74] Wang T L, Zhao Q C, Yang C J. Visual navigation and docking for a planar type AUV docking and charging system[J]. Ocean Engineering, 2021, 224: 108744. doi: 10.1016/j.oceaneng.2021.108744 [75] Ren R Z, Zhang L C, Liu L, et al. Two AUVs guidance method for self-reconfiguration mission based on monocular vision[J]. IEEE Sensors Journal, 2021, 21(8): 10082-10090. doi: 10.1109/JSEN.2020.3042306 [76] Robert S, Brett W, McBride L, et al. Docking Control System for a 54-cm-Diameter (21-in) AUV[J]. IEEE Journal of Oceanic Engineering, 2009, 33(4): 550-562. [77] Wirtz M, Hildebrandt M. IceShuttle Teredo: An ice-penetrating robotic system to transport an exploration AUV into the ocean of Jupiter’s moon Europa[C]//67th International Astronautical Congress. Guadalajara, Mexico: ICA, 2016: 26-30. [78] Li B, Page B, Hoffman J, et al. Rendezvous planning for multiple AUVs with mobile charging stations in dynamic currents[J]. IEEE Robotics and Automation Letters, 2019, 4(2): 1653-1660. doi: 10.1109/LRA.2019.2896899 [79] Zhang Y X, Gao J, Chen Y M, et al. Adaptive neural network control for visual docking of an autonomous underwater vehicle using command filtered backstepping[J]. International Journal of Robust and Nonlinear Control, 2022, 32(8): 4716-4738. doi: 10.1002/rnc.6051 [80] 张涛, 李德骏, 彭时林, 等. 基于视觉导引与旋转接驳的自主水下航行器末端入坞研究[J]. 机械工程学报, 2018, 54(20): 81-88. doi: 10.3901/JME.2018.20.081Zhang Tao, Li Dejun, Peng Shilin, et al. Research on terminal docking of autonomous underwater vehicle based on visual guidance and rotational docking station[J]. Journal of Mechanical Engineering, 2018, 54(20): 81-88. doi: 10.3901/JME.2018.20.081 [81] 青岛市民网. 海洋试点国家实验室: 水下光学导引成功实现AUV对接[EB/OL]. (2019-06-22)[2023-4-27]. https://www.dailyqd.com/epaper/html/2019-07/03/content_254093.htm. [82] 谢争明, 曾庆军, 朱志宇, 等. AUV自主对接回收动力定位控制系统设计与实现[J]. 软件导刊, 2021, 20(10): 169-173.Xie Zhengming, Zeng Qingjun, Zhu Zhiyu, et al. Design and implementation of AUV autonomous docking recovery dynamic positioning control system[J]. Software Guide, 2021, 20(10): 169-173. [83] Kim T W, Marani G, Yuh J. Underwater vehicle manipulators[M]. Maryland:Springer Handbook of Ocean Engineering, 2016: 407-422. [84] Zhang W X, Xu H C,Ding X L, et al. Design and dynamic analysis of an underwater manipulator[C]//Proceedings of the 2015 Chinese lntelligent Automation Conference. Fuzhou, China: CIAC, 2015: 339-409 [85] Cheng W, Zhou H Y, Liu G Q. Summary of control algorithm for underwater robot[C]//2020 5th International Conference on Mechanical, Control and Computer Engineering. Harbin, China: ICMCCE , 2020: 759-762. [86] 王尧尧. 自治水下运载器—机械手系统协调控制研究[D]. 杭州: 浙江大学, 2016. [87] 肖治琥. 深水机械手动力学特性及自主作业研究[D]. 武汉: 华中科技大学, 2011. [88] 常宗瑜, 张扬, 郑方圆, 等. 水下机器人-机械手系统研究进展: 结构、建模与控制[J]. 机械工程学报, 2020, 56(19): 53-69. doi: 10.3901/JME.2020.19.053Chang Zongyu, Zhang Yang, Zheng Fangyuan, et al. Research progress of underwater vehicle-manipulator systems: Configuration, modeling and control[J]. Journal of Mechanical Engineering, 2020, 56(19): 53-69. doi: 10.3901/JME.2020.19.053 [89] 香港科技大学. 科大水底机械人大赛向多元背景的年青人推动「STEAM教育」 [EB/OL].(2017-05-08)[2024-3-18]. https://hkust.edu.hk/zh-hans/news/stem-education/hkust-underwater-robot-competition-promotes-steam-education-youngsters-wide. [90] Ribas D, Palomeras N, Ridao P, et al. Girona 500 AUV: From survey to intervention[J]. IEEE/ASME Transactions on Mechatronics, 2012, 17(1): 46-53. doi: 10.1109/TMECH.2011.2174065 [91] Barbalata C, Dunnigan M W, Petillot Y. Position/force operational space control for underwater manipulation[J]. Robotics and Autonomous Systems, 2018, 100: 150-159. doi: 10.1016/j.robot.2017.11.004 [92] 大连海事新闻网. 我校在2020年全国水下机器人大赛中喜获佳绩[EB/OL]. (2020-09-24)[2023-4-27]. https://news.dlmu.edu.cn/info/1021/16998.htm. [93] 上海交通大学水下工程研究所. 上海交通大学教授朱继懋揭秘“海龙”号海底机器人 [EB/OL]. (2011-10-25)[2023-4-27]. https://underwater.sjtu.edu.cn/info/4446/11778.htm. [94] 纪辉, 兰宇, 武子为, 等. 面向水下作业的水液压机械手研究与展望[J]. 机械工程学报, 2023, 59(4): 283-294. doi: 10.3901/JME.2023.04.283Ji Hui, Lan Yu, Wu Ziwei, et al. Research progress and prospect of water hydraulic manipulator for underwater operation[J]. Journal of Mechanical Engineering, 2023, 59(4): 283-294. doi: 10.3901/JME.2023.04.283 [95] 杨妍, 刘志杰, 韩江涛, 等. 软体机械臂的驱动方式、建模与控制研究进展[J]. 工程科学学报, 2022, 44(12): 2124-2137.Yang Yan, Liu Zhijie, Han Jiangtao, et al. Overview of actuators, modeling, and control methods for soft manipulators[J]. Chinese Journal of Engineering, 2022, 44(12): 2124-2137. [96] Chen X Q, Zhang X, Huang Y Y, et al. A review of soft manipulator research, applications, and opportunities[J]. Journal of Field Robotics, 2021, 39(3): 281-311. [97] Jin K, Choi H S, Nguyen N D, et al. Simulation and experimental validation for dynamic stability of underwater vehicle-manipulator system[C]//Oceans 2017-Anchorage. Anchorage, USA: Oceans, 2017: 1-5. [98] 羊波, 王琨, 马祥祥, 等. 多智能体强化学习的机械臂运动控制决策研究[J]. 计算机工程与应用, 2023, 59(6): 318-325.Yang Bo, Wang Kun, Mang Xiangxiang, et al. Research on motion control method of manipulator based on reinforcement learning[J]. Computer Engineering and Applications, 2023, 59(6): 318-325. [99] Gao J, Liang X M, Chen Y M, et al. Hierarchical image-based visual serving of underwater vehicle manipulator systems based on model predictive control and active disturbance rejection control[J]. Ocean Engineering, 2021, 229: 108814. doi: 10.1016/j.oceaneng.2021.108814 [100] 张子扬. 基于深度强化学习的水下机械臂抓取研究[D]. 合肥: 中国科学技术大学, 2020. [101] 李煊. 基于双目视觉的水下目标图像处理与定位技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2018. [102] Zhang Z Y, Cong W, Zhang Q F, et al. Research on autonomous grasping control of underwater manipulator based on visual servo[C]//2019 Chinese Automation Congress. Hangzhou, China: IEEE, 2020: 2904-2910. [103] Yu W, Wang S, Wei Q P, et al. Development of an underwater manipulator and its free-floating autonomous operation[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(2): 815-824. doi: 10.1109/TMECH.2015.2494068 [104] Zheng Z H, Xie J R, Tao S, et al. A novel remote control method oriented to underwater maninulators[C]//2021 IEEE International Conference on Mechatronics and Automation(ICMA). Takamatsu, Japan: IEEE, 2021: 843-848. [105] Wen Y Q, Gao J, Song Y X, et al. Motion planning for image-based visual servoing of an underwater vehicle-manipulator system in task-priority frameworks[C]//2022 IEEE 9th International Conference on Underwater System Technology: Theory and Applications(USYS). Kuala Lumpur, Malaysia: IEEE, 2022: 1-5. [106] Dai Y, Yu S H. Design of an indirect adaptive controller for the trajectory tracking of UVMS[J]. Ocean Engineering, 2018, 151: 234-245. doi: 10.1016/j.oceaneng.2017.12.070 [107] Ma R C, Wang Y, Wang S, et al. Sample-observed soft actor-critic learning for path following of a biomimetic underwater vehicle[J]. IEEE Transactions on Automation Science and Engineering, 2023: 1-10. [108] Yu W, Cai M X, Wang S, et al. Development and control of an underwater vehicle-manipulator system propelled by flexible flippers for grasping marine organisms[J]. IEEE Transactions on Industrial Electronics, 2021, 69(4): 3898-3908. [109] Li H F, Xu J, Yu J Z. Discrete event-triggered fault-tolerant control of underwater vehicles based on takagi–sugeno fuzzy model[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 53(3): 1841-1851. [110] Moon J, Bae S H, Cashmore M. Meta reinforcement learning based underwater manipulator control[C]//2021 21st International Conference on Control, Automation and Systems(ICCAS). Jeju, Korea: IEEE, 2021: 1473-1476. [111] Li Y F, Gao J, Wang X X, et al. Depth camera based remote three-dimensional reconstruction using incremental point cloud compression[J]. Computers and Electrical Engineering, 2022, 99: 107767. doi: 10.1016/j.compeleceng.2022.107767 -

 下载:
下载:





 点击查看大图
点击查看大图
计量
- 文章访问数: 1387
- HTML全文浏览量: 549
- PDF下载量: 359
- 被引次数: 0





