

Two-Point Positioning Method with Magnetic Gradient Tensor Invariant Constraints
-
摘要: 文中针对单点磁梯度张量定位方法受地磁场估计误差影响较大, 同时多点磁梯度张量定位方法容易陷入局部最优解等问题, 提出一种两点磁梯度张量定位方法。该方法在单点磁梯度张量定位算法的基础上, 采用两点磁梯度张量测量数据, 叠加张量几何不变量的约束条件, 构建关于目标位置坐标的非线性目标函数, 采用基于自然选择的粒子群算法对目标位置坐标进行求解。仿真实验表明, 文中提出的方法受地磁场估计误差影响较小, 且能实现对全局最优解的搜索, 定位精度较高。仿真分析不同系统基线长度和磁力仪灵敏度条件下文中方法对磁性目标的定位效果可知, 当系统的基线长度越大, 磁力仪的灵敏度越高, 磁性目标定位误差越小。Abstract: Single-point magnetic gradient tensor positioning methods are greatly affected by geomagnetic field estimation errors, and multi-point magnetic gradient tensor positioning methods are easy to get trapped in local optima. To address these issues, a two-point magnetic gradient tensor positioning method was proposed. Based on the single-point magnetic gradient tensor positioning algorithm, this method used two-point magnetic gradient tensor measurement data and superimposed the constraints of tensor geometric invariants to construct a nonlinear objective function about the target position coordinates, and it used the natural selection-based particle swarm optimization(NSPSO) algorithm to solve the target position coordinates. Simulation experiments demonstrate that the proposed method is less affected by geomagnetic field estimation errors and can search for global optima. It exhibits high localization accuracy. The simulation analysis considers the positioning performance of the proposed method for magnetic targets under different system baseline lengths and magnetometer sensitivities. The results indicate that as the system baseline length and the magnetometer sensitivity improve, the positioning error for magnetic targets decreases.
-
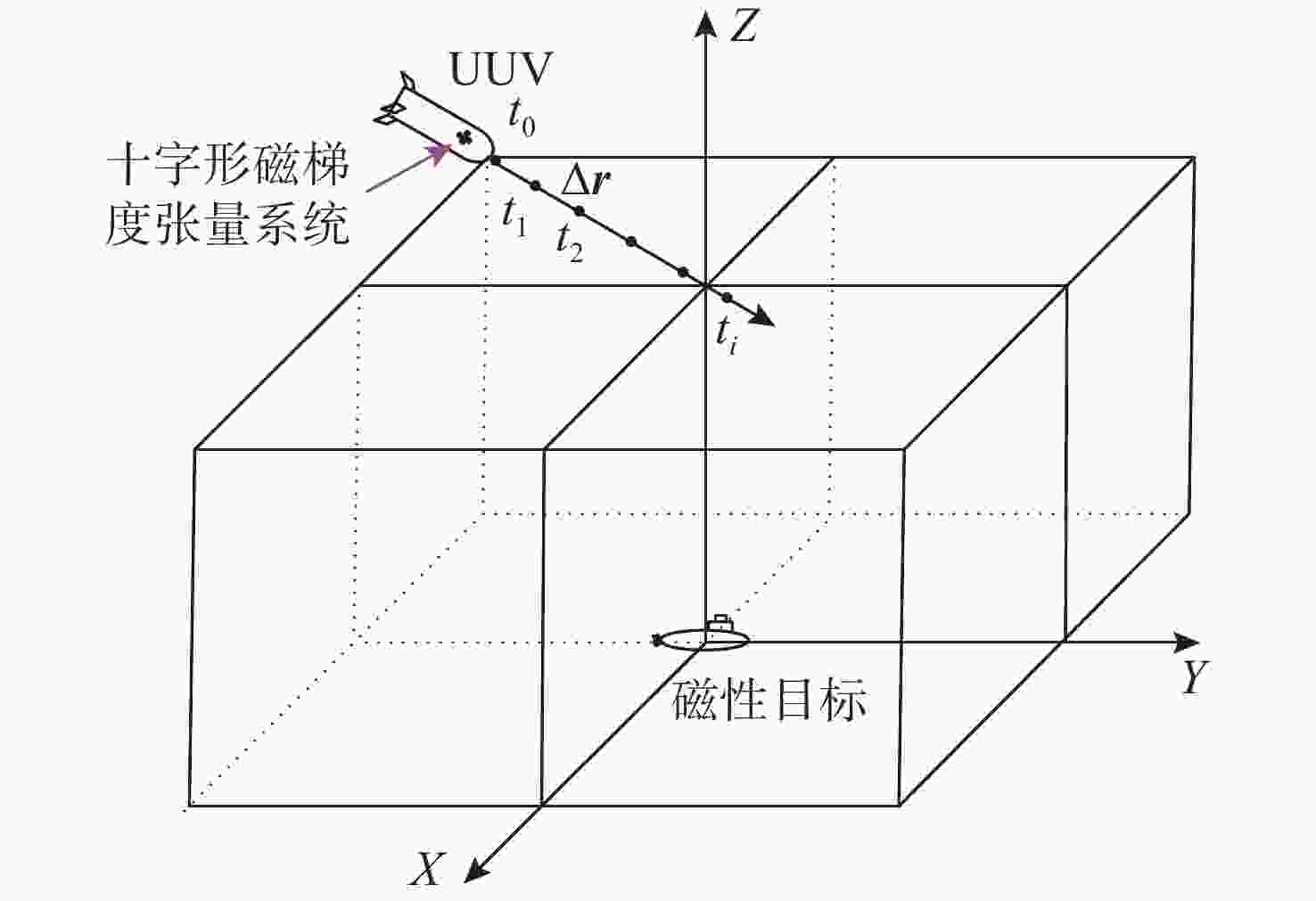
图 2 搭载十字形磁梯度张量系统的UUV运动示意图
Figure 2. Motion of UUV equipped with a cross magnetic gradient tensor system

图 4 不同磁力仪灵敏度下文中方法定位误差
Figure 4. Positioning error of the proposed method under different magnetometer sensitivities
-
[1] Clark D A. New methods for interpretation of magnetic vector and gradient tensor data I: Eigenvector analysis and the normalized source strength[J]. Exploration Geophysics, 2012, 43: 267-282. doi: 10.1071/EG12020 [2] Wynn M, Frahm P, Carroll J, et al. Advanced super-conducting gradiometer/magnetometer arrays and a novel signal processing technique[J]. IEEE Transactions on Magnetics, 1975, 11(2): 701-707. doi: 10.1109/TMAG.1975.1058672 [3] Nara T, Suzuki S, Ando S. A closed form formula for magnetic dipole localization by measurement of its magnetic field and spatial gradients[J]. IEEE Transactions on magnetics, 2006, 42(10): 3291-3293. doi: 10.1109/TMAG.2006.879151 [4] 李光, 随阳轶, 刘丽敏, 等. 基于差分的磁偶极子单点张量定位方法[J]. 探测与控制学报, 2012, 34(5): 50-54.Li Guang, Sui Yangyi, Liu Limin, et al. Magnetic dipole single-point tensor positioning based on the difference method[J]. Journal of Detection & Control, 2012, 34(5): 50-54. [5] Sui Y Y, Leslie K, Clark D. Multiple-order magnetic gradient tensors for localization of a magnetic dipole[J]. IEEE Magnetic Letters, 2017, 8: 1-5. [6] 于振涛, 吕俊伟, 樊利恒, 等. 基于磁梯度张量的目标定位改进方法[J]. 系统工程与电子技术, 2014, 36(7): 1250-1254.Yu Zhentao, Lü Junwei, Fan Liheng, et al. Improved method of magnetic localization based on magnetic gradient tensor[J]. Systems Engineering and Electronics, 2014, 36(7): 1250-1254. [7] Yin G, Zhang Y T, Fan H B, et al. Magnetic dipole localization based on magnetic gradient tensor data at a single point[J]. Journal of Applied Remote Sensing, 2014, 8(1): 1-18. [8] 刘继昊, 李夕海, 曾小牛. 基于两点磁梯度张量的磁性目标在线定位方法[J]. 地球物理学报, 2017, 60(10): 3995-4004.Liu Jihao, Li Xihai, Zeng Xiaoniu. Online magnetic target location method based on the magnetic gradient tensor of two points[J]. Chinese Journal of Geophysics, 2017, 60(10): 3995-4004. [9] Liu H, Wang X, Zhao C, et al. Magnetic dipole two-point tensor positioning based on magnetic moment constraints[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 9700410. [10] 戴忠华, 周穗华, 单珊. 两点磁梯度张量定位方法[J]. 探测与控制学报, 2018, 40(1): 44-48.Dai Zhonghua, Zhou Suihua, Shan Shan. A localization method of two-point magnetic gradient tensor[J]. Journal of Detection & Control, 2018, 40(1): 44-48. [11] 张光, 张英堂, 李志宁, 等. 载体平动条件下的磁梯度张量定位方法[J]. 华中科技大学学报: 自然科学版, 2013, 41(1): 21-24.Zhang Guang, Zhang Yingtang, Li Zhining, et al. Localization method of magnetic field gradient tensor under carriers moving parallelly[J]. J. Huazhong Univ. of Sci. & Tech(Natural Science Edition), 2013, 41(1): 21-24. [12] Wiegert R F. Magnetic STAR technology for real-time localization and classification of unexploded ordnance and buried mines[C]//Detection & Sensing of Mines, Explosive Objects, & Obscured Targets XIV International Society for Optics and Photonics. Orlando FL, US: [s.n.], 2009. [13] 吕俊伟, 迟铖, 于振涛, 等. 磁梯度张量不变量的椭圆误差消除方法研究[J]. 物理学报, 2015, 64(19): 52-59.Lü Junwei, Chi Cheng, Yu Zhentao, et al. Research on the asphericity error elimination of the invariant of magnetic gradient tensor[J]. Acta Physica Sinica, 2015, 64(19): 52-59. [14] 尹刚, 张英堂, 李志宁, 等. 磁偶极子梯度张量的几何不变量及其应用[J]. 地球物理学报, 2016, 59(2): 749-756.Yin Gang, Zhang Yingtang, Li Zhining, et al. Research on geometric invariant of magnetic gradient tensors for a magnetic dipole source and its application[J]. Chinese Journal of Geophysics, 2016, 59(2): 749-756. [15] Zangwill W I. Non-linear programming via penalty functions[J]. Manage. Sci., 1967, 13(5): 344-358. [16] 蒋伊琳, 张芳园. 基于自然选择粒子群的时钟同步算法[J]. 西南交通大学学报, 2017, 52(3): 593-599.Jiang Yilin, Zhang Fangyuan. Clock synchronization algorithm based on particle swarm optimization with natural selection[J]. Journal of Southwest Jiaotong University, 2017, 52(3): 593-599. [17] 迟铖, 吕俊伟. 磁梯度张量系统结构的比较分析[J]. 指挥控制与仿真, 2019, 41(1): 46-49.Chi Cheng, Lü Junwei. Comparative analysis of magnetic gradient tensor system structure[J]. Command Control & Simulation, 2019, 41(1): 46-49. [18] 彭翔, 郭弘. 光泵原子磁力仪技术[J]. 导航与控制, 2022, 21(5/6): 101-121, 198.Peng Xiang, Guo Hong. Techniques in optically-pumped atomic magnetometer[J]. Navigation and Control, 2022, 21(5/6): 101-121, 198. -

 下载:
下载:





 点击查看大图
点击查看大图
计量
- 文章访问数: 564
- HTML全文浏览量: 198
- PDF下载量: 99
- 被引次数: 0

图(5)




