

Calculation Method for UKF Target Motion Elements Based on Detection Information of Active and Passive Sonars
-
摘要: 目标运动要素作为水下作战的重要信息, 其解算结果会对目标命中概率产生较大影响, 进而影响打击决策。目前传统的水面舰反潜目标运动要素解算方法信息来源为主动声呐。由于主动声呐采用固定送数周期, 在连续跟踪过程部分时间段目标信息存在空隙, 导致目标运动要素解算结果误差大、收敛速度慢。为了更加快速、准确地获得目标运动要素, 文中将被动声呐观测信息加入到滤波过程中, 使用无迹卡尔曼滤波方法对只采用主动声呐探测信息方式及主被动声呐联合探测信息方式进行仿真研究, 并对结果进行对比分析。仿真结果表明, 在其他条件相同的情况下, 与传统方法相比, 文中方法可明显提高收敛精度和速度, 使速度解算精度平均提升33.55%, 方位角解算精度平均提升38.99%, 航向解算精度平均提升35.29%, 验证了该方法的有效性。Abstract: The target motion element is important information in anti-submarine warfare, and its calculation results have a great influence on the hitting probability of the target, thus affecting combat decision-making. At present, active sonar is the main source of information in the calculation method for target motion elements in anti-submarine warfare of surface ships. However, active sonar uses a fixed number of sending periods, and there are gaps in the target information during the continuous tracking process. As a result, there are large errors and slow convergence in the calculation results of the target motion elements. In order to obtain the target motion elements more quickly and accurately, the detection information of passive sonar was added to the filtering process. The unscented Kalman filter(UKF) method was used to simulate the information detection methods using only active sonar and both active and passive sonars, and the results were compared. The simulation results show that under the same conditions, the proposed method can significantly improve the convergence accuracy and speed compared with the traditional method. It can improve the calculation accuracy of speed, azimuth, and heading angle by 33.55%, 38.99%, and 35.29% on average, verifying its effectiveness.
-
Key words:
- underwater warfare /
- target motion element /
- unscented Kalman filter /
- active sonar /
- passive sonar
-
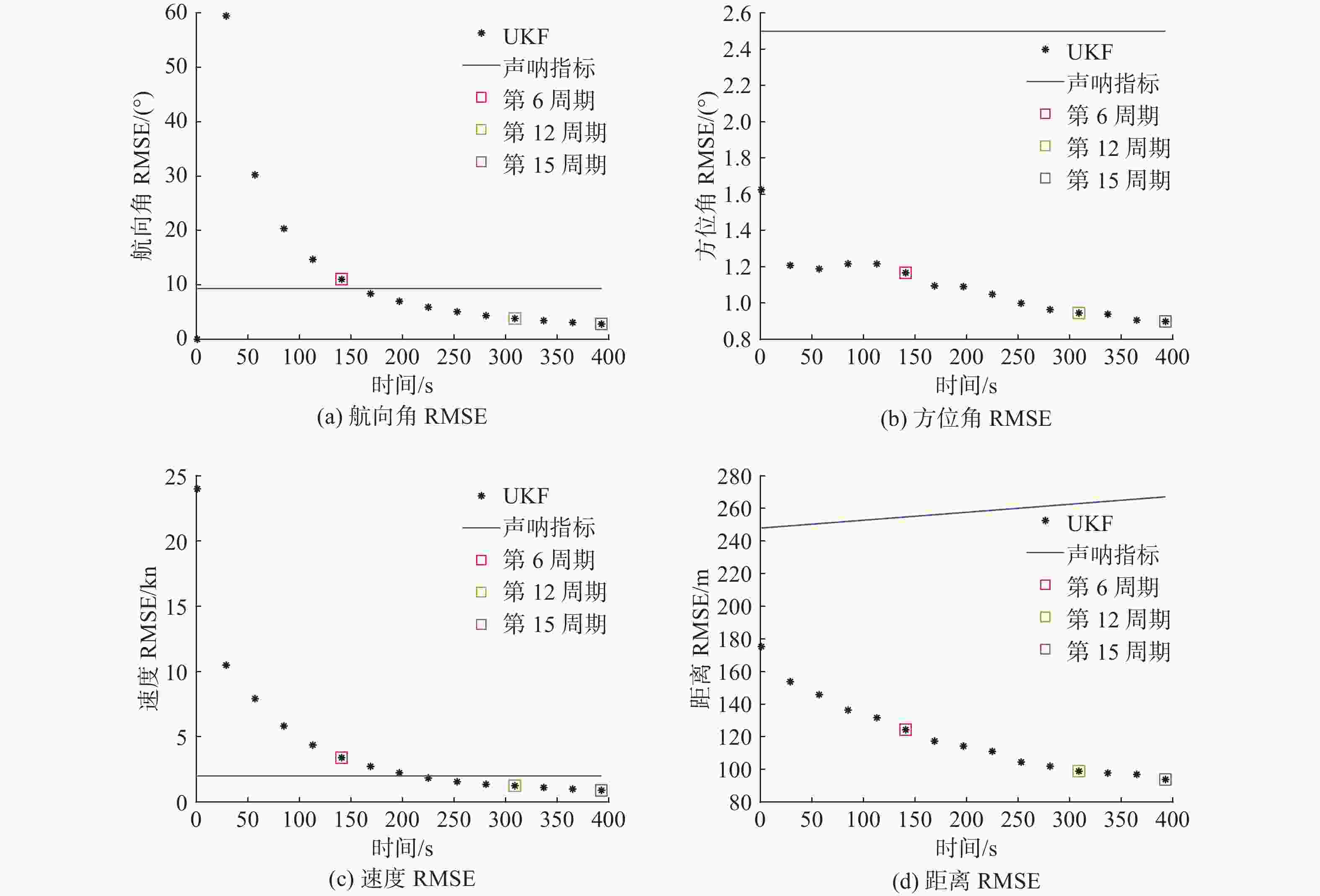
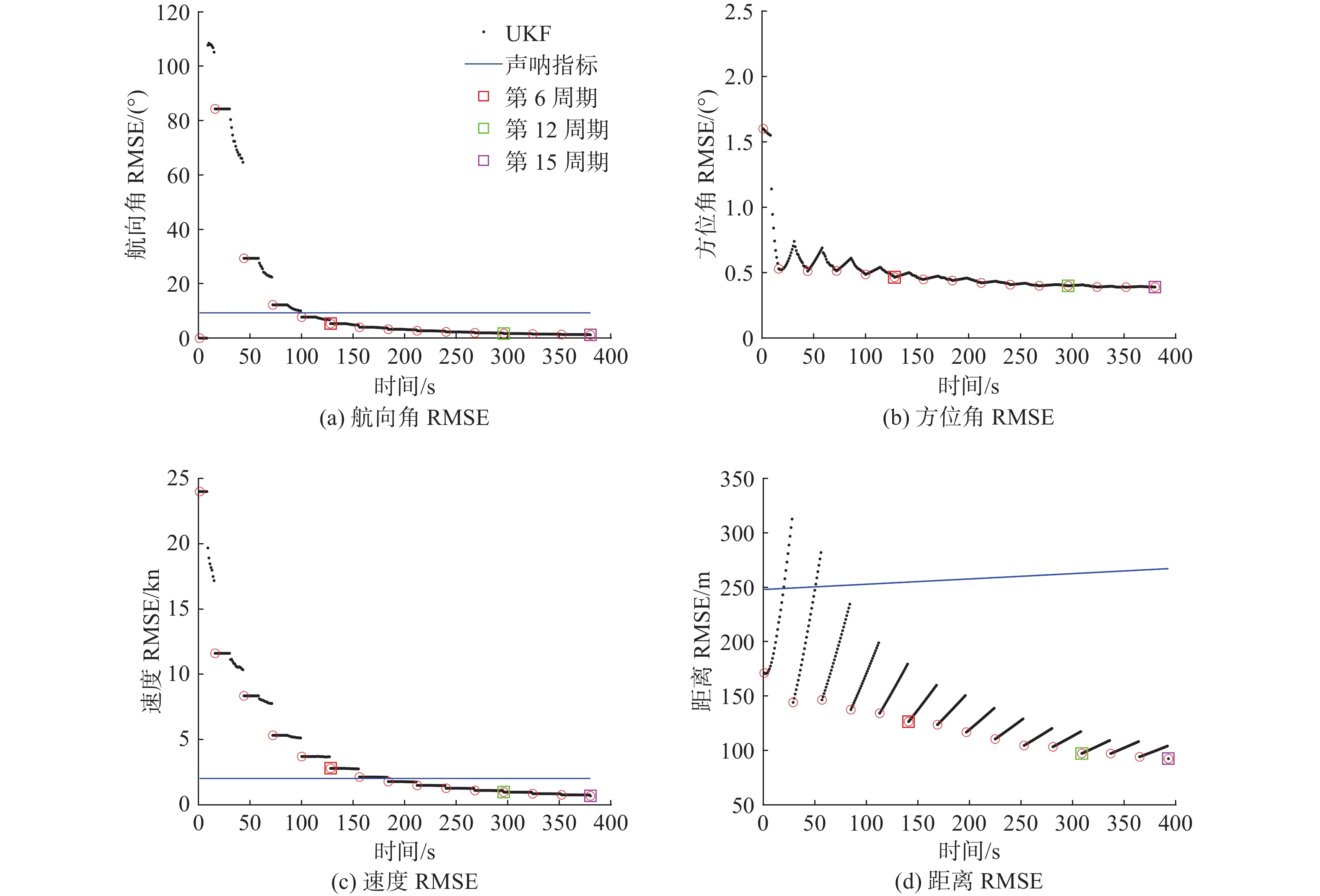
图 4 情况1航向角、方位角、速度和距离估计RMSE
Figure 4. The estimation RMSE of heading angle, azimuth angle, velocity and range under condition 1

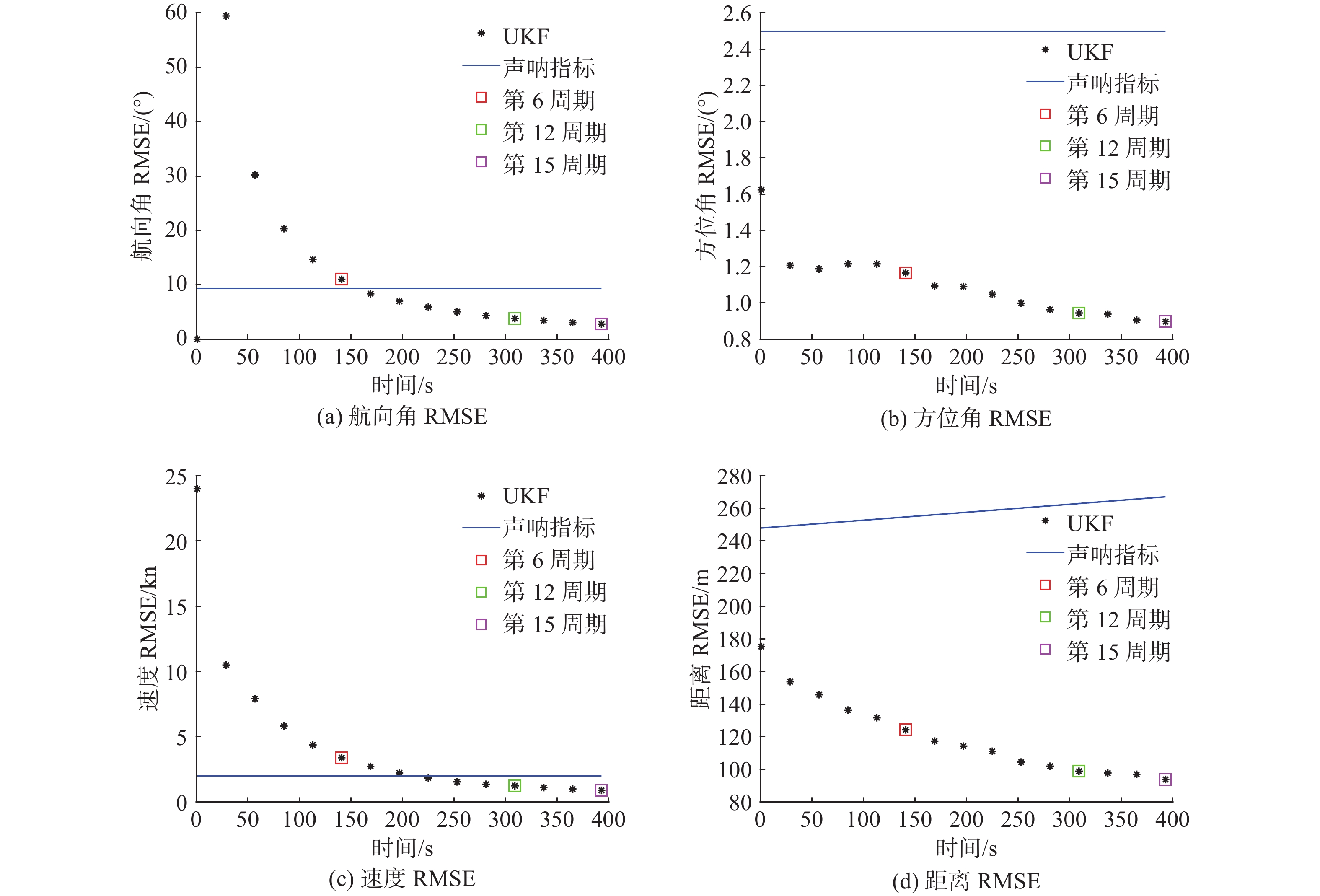
图 6 情况2航向角、方位角、速度和距离估计RMSE
Figure 6. The estimation RMSE of heading angle, azimuth angle, velocity and range under condition 2
表 1 情况1估计RMSE与标准值对比
Table 1. Comparison of the estimated RMSE with the standard value under condition1
记录周期 目标距离/km 目标方位/(°) 目标航向/(°) 目标速度/kn 距离/m 速度/kn 方位角/(°) 航向角/(°) RMES 标准值 RMES 标准值 RMES 标准值 RMES 标准值 6 7 30 0 24 118.5 179.6 4.53 2 2.31 2.5 14.52 9.28 90 108.7 175.2 5.37 2 1.69 2.5 13.51 9.28 180 84.5 151.8 4.35 2 1.85 2.5 10.32 9.28 −90 84.1 157.2 5.33 2 1.90 2.5 11.92 9.28 12 7 30 0 24 96.9 184.0 1.61 2 2.14 2.5 5.19 9.28 90 86.7 178.8 1.77 2 1.43 2.5 4.60 9.28 180 59.0 127.4 1.39 2 1.71 2.5 3.70 9.28 −90 58.3 135.8 1.63 2 1.67 2.5 3.16 9.28 15 7 30 0 24 91.2 186.2 1.09 2 2.11 2.5 3.86 9.28 90 79.6 182.4 1.22 2 1.38 2.5 3.57 9.28 180 51.1 118.7 0.94 2 1.64 2.5 3.01 9.28 −90 49.7 125.9 1.08 2 1.56 2.5 2.29 9.28  下载: 导出CSV
下载: 导出CSV
表 2 情况2给定态势下估计RMSE与标准值对比
Table 2. Comparison of the estimated RMSE with the standard under condition2
记录周期 目标距离/km 目标方位/(°) 目标航向/(°) 目标速度/kn 距离/m 速度/kn 方位角/(°) 航向角/(°) RMES 标准值 RMES 标准值 RMES 标准值 RMES 标准值 6 7 30 0 24 110.0 179.6 3.57 2 1.56 2.5 8.05 9.28 90 121.0 175.2 2.98 2 1.80 2.5 8.64 9.28 180 101.0 151.8 3.31 2 0.50 2.5 7.74 9.28 −90 87.9 157.2 2.61 2 0.43 2.5 7.97 9.28 12 7 30 0 24 90.4 184.0 1.29 2 1.53 2.5 2.61 9.28 90 106.9 178.8 1.08 2 1.72 2.5 2.94 9.28 180 77.2 127.4 0.96 2 0.46 2.5 2.62 9.28 −90 65.3 135.8 0.75 2 0.32 2.5 2.74 9.28 15 7 30 0 24 87.4 186.2 0.96 2 1.51 2.5 1.80 9.28 90 101.2 182.4 0.81 2 1.71 2.5 2.43 9.28 180 67.4 118.7 0.62 2 0.46 2.5 1.92 9.28 −90 49.7 125.9 1.08 2 1.56 2.5 2.29 9.28
下载: 导出CSV
-
[1] 王晓宇. 水下多目标检测前跟踪方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2018. [2] Li D, Lin Y, Zhang Y. A track initiation method for the underwater target tracking environment[J]. China Ocean Engineering, 2018, 32(2): 206-215. doi: 10.1007/s13344-018-0022-0 [3] 刘妹琴, 韩学艳, 张森林, 等. 基于水下传感器网络的目标跟踪技术研究现状与展望[J]. 自动化学报, 2021, 47(2): 235-251.Liu Meiqin, Han Xueyan, Zhang Senlin, et al. Research status and prospect of target tracking technologies via underwater sensor networks[J]. Acta Automatica Sinica, 2021, 47(2): 235-251. [4] Thiruselvan D, Ananth J P. Underwater target tracking in radar images using exponential competitive swarm-based deep neuro fuzzy network[J]. International Journal on Artificial Intelligence Tools, 2022, 31(8): 2250039. doi: 10.1142/S0218213022500397 [5] 赵伟康, 韩一娜, 杨益新, 等. 基于元启发算法的纯方位被动定位方法[J]. 水下无人系统学报, 2018, 26(6): 623-627.Zhao Weikang, Han Yina, Yang Yixin, et al. Bearing-only passive location based on meta-heuristic algorithm[J]. Journal of Unmanned Undersea Systems, 2018, 26(6): 623-627. [6] 吴婧. 多被动声呐纯方位目标跟踪算法研究[D]. 哈尔滨: 哈尔滨工程大学, 2021. [7] 苏骏, 李亚安, 陈晓, 等. 双观测站水下纯方位多目标跟踪的数据关联算法[J]. 水下无人系统学报, 2018, 26(2): 115-121.Su Jun, Li Yaan, Chen Xiao, et al. Data association algorithm for multi-target tracking of underwater bearings-only systems with double observation stations[J]. Journal of Unmanned Undersea Systems, 2018, 26(2): 115-121. [8] 陈立军, 郝保雷, 郑剑. AUV平台的水下机动目标跟踪[J]. 网络新媒体技术, 2020, 9(5): 48-54.Chen Lijun, Hao Baolei, Zheng Jian. Underwater maneuveing target tracking on AUV platform[J]. Journal of Network New Media, 2020, 9(5): 48-54. [9] 成春彦, 李亚安. EKF和UKF算法在双观测站纯方位目标跟踪中的应用[J]. 水下无人系统学报, 2023, 31(3): 388-397. doi: 10.11993/j.issn.2096-3920.202203014Cheng Chunyan, LI Yaan. Applications of EKF and UKF algorithms in bearings-only target tracking of double observation stations[J]. Journal of Unmanned Undersea Systems, 2023, 31(3): 388-397. doi: 10.11993/j.issn.2096-3920.202203014 [10] 李晓花. 基于信息融合的水下多目标跟踪技术研究[D]. 西安: 西北工业大学, 2016. [11] 王湘宇. 雷达目标检测跟踪算法设计与实现[D]. 西安: 西安电子科技大学, 2020. [12] Gao B, Gao S, Hu G, et al. Maximum likelihood principle and moving horizon estimation based adaptive unscented Kalman filter[J]. Aerospace Science and Technology, 2018, 73: 184-196. doi: 10.1016/j.ast.2017.12.007 [13] 蒋帆. 时变环境下动力定位船舶状态估计与模型辨识方法研究[D]. 武汉: 武汉理工大学, 2020. [14] Prasanna K, Rao S K, Karishma S. Application of cubature Kalman filter for bearings only target tracking[J]. Indian Journal of Science and Technology, 2016, 9(17): 90250. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 594
- HTML全文浏览量: 221
- PDF下载量: 110
- 被引次数: 0





