An Improved MFAC Energy Saving Control Method for USVs in Wave Environments
-
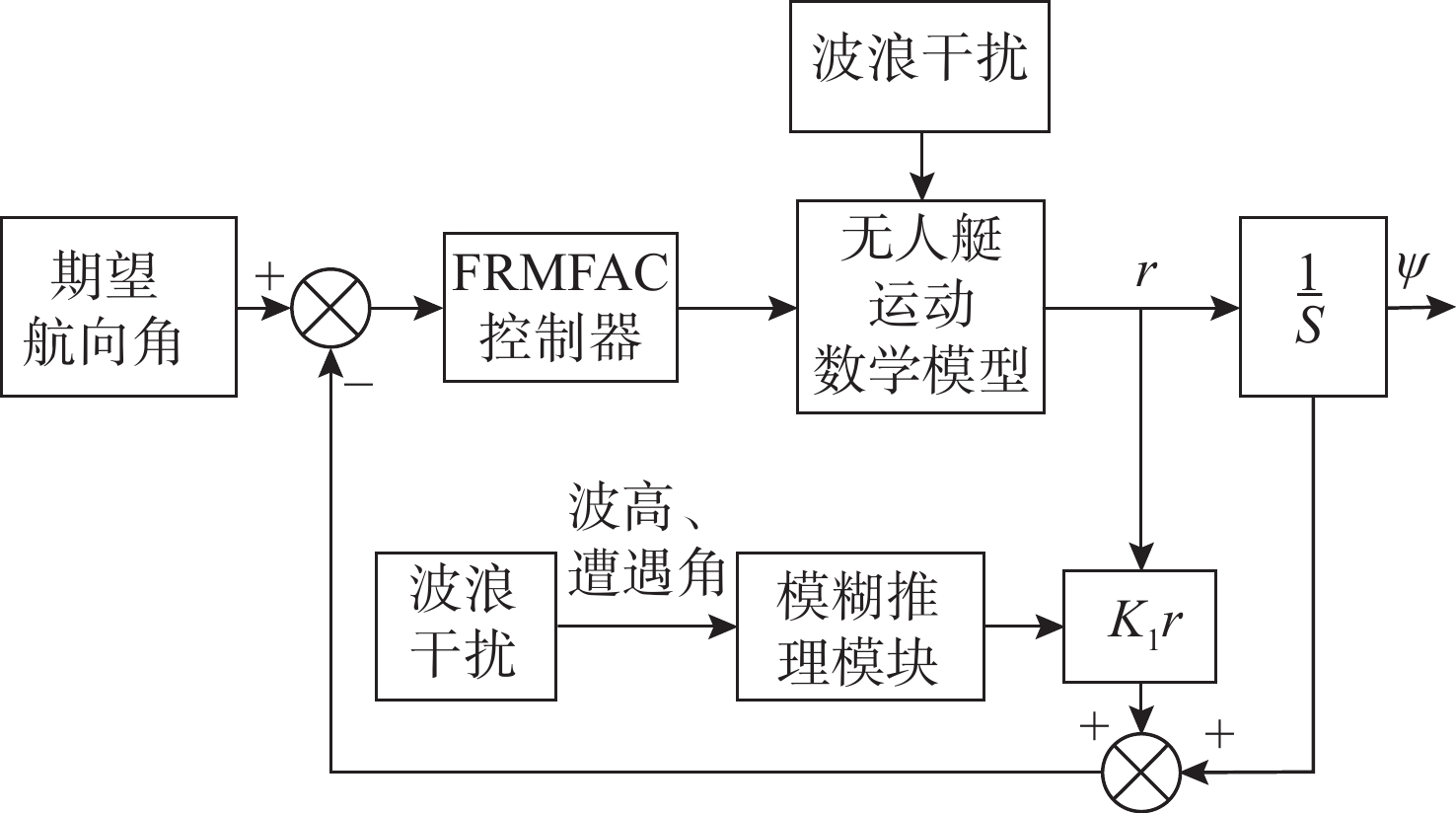
摘要: 无人水面艇在运动过程中容易受到环境干扰的影响, 尤其在受到波浪干扰后会导致其运动控制偏离期望路径, 进而造成能量浪费。针对波浪环境下固定参数控制器对环境适应能力较弱的问题, 将模糊控制方法与重定义无模型自适应控制方法相结合, 设计了一种模糊重定义无模型自适应控制(FRMFAC)算法, 该算法可以根据不同波浪的干扰情况自行调整控制参数; 同时, 采用视线法与FRMFAC算法对无人艇进行路径跟随控制;最后, 通过与固定参数控制方法进行对比试验, 验证了该算法的有效性和节能效果。对比仿真结果可知, 使用可变参数的控制方法可以在有效提高无人艇对环境适应能力的同时起到节能效果。Abstract: Unmanned surface vessels(USVs) are subjected to environmental disturbance in the process of movement. In particular, after being disturbed by waves, its motion control will deviate from the expected path, resulting in a waste of energy. In response to the problem of weak adaptability of fixed parameter controllers to the wave environment, the fuzzy control method was combined with the redefined model-free adaptive control(MFAC) method, and a fuzzy redefined MFAC(FRMFAC) algorithm was designed, which could adjust the control parameters according to the disturbance of different waves. At the same time, the line-of-sight method and FRMFAC algorithm were used to control the path following of USVs. Finally, compared with the fixed parameter control method, the effectiveness and energy saving effect of FRMFAC were verified. The simulation results show that the control method with variable parameters can effectively improve the adaptability of USVs to the environment and save energy.
-
Key words:
- unmanned surface vessel /
- motion control /
- model-free adaptive control /
- wave disturbance
-

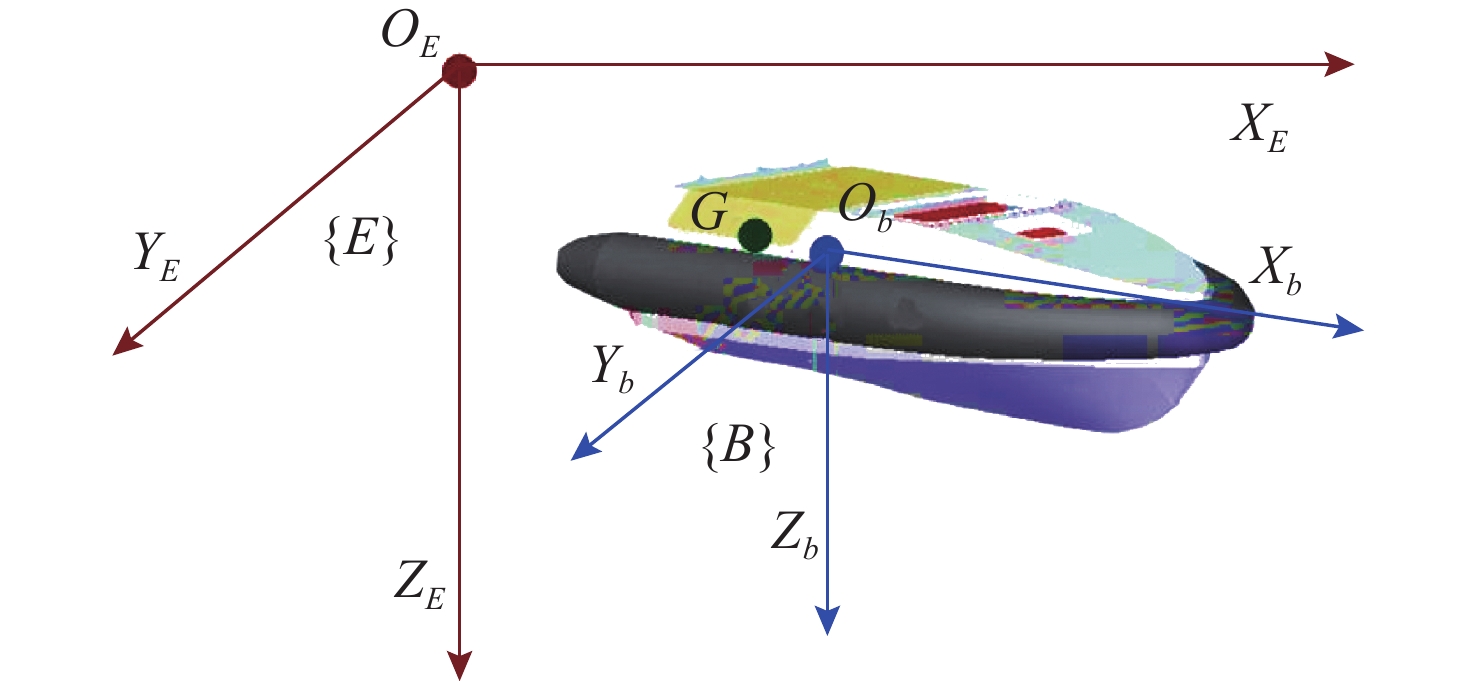
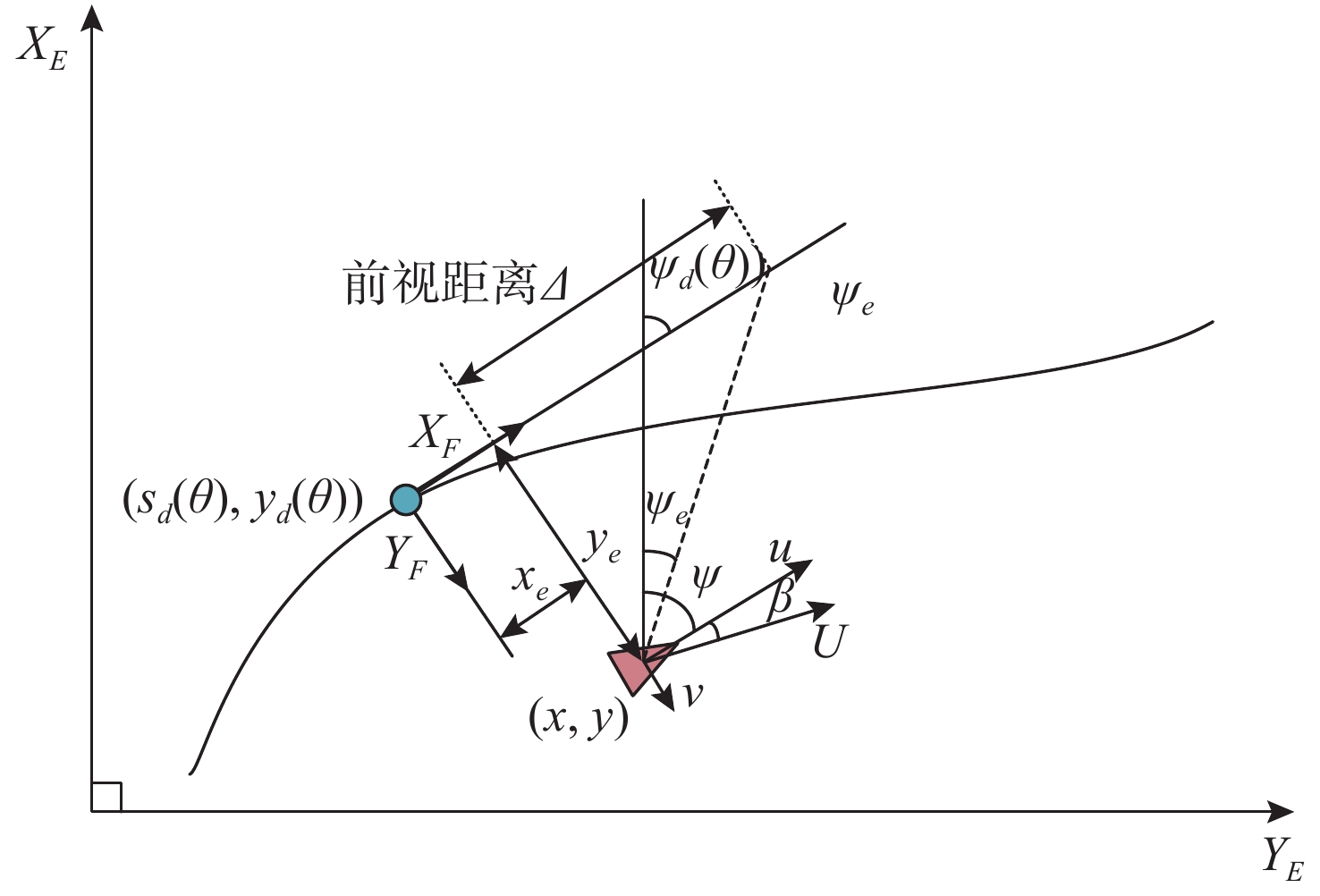
图 1 惯性坐标系和船体坐标系
Figure 1. Inertial coordinate system and hull coordinate system of ship
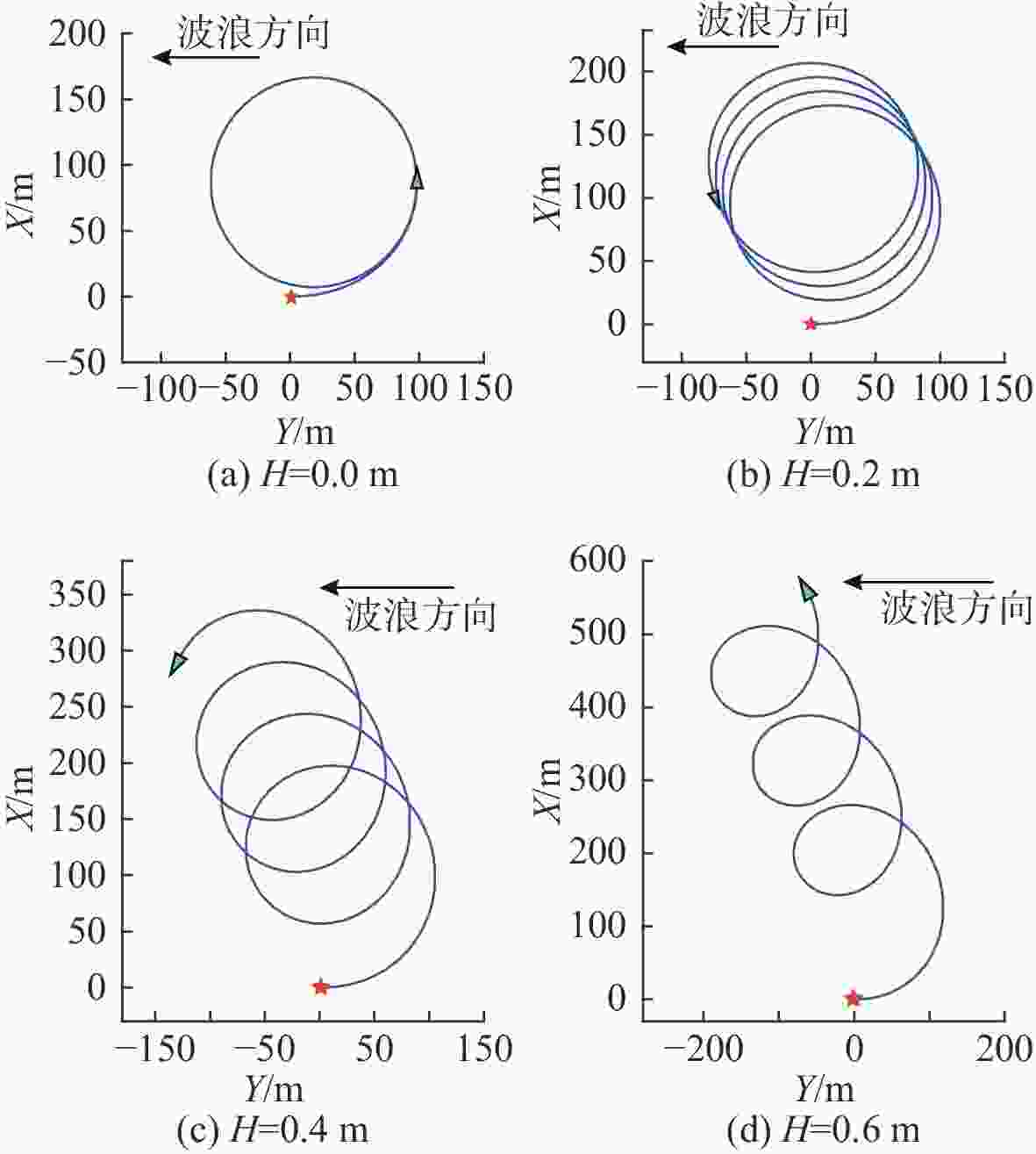
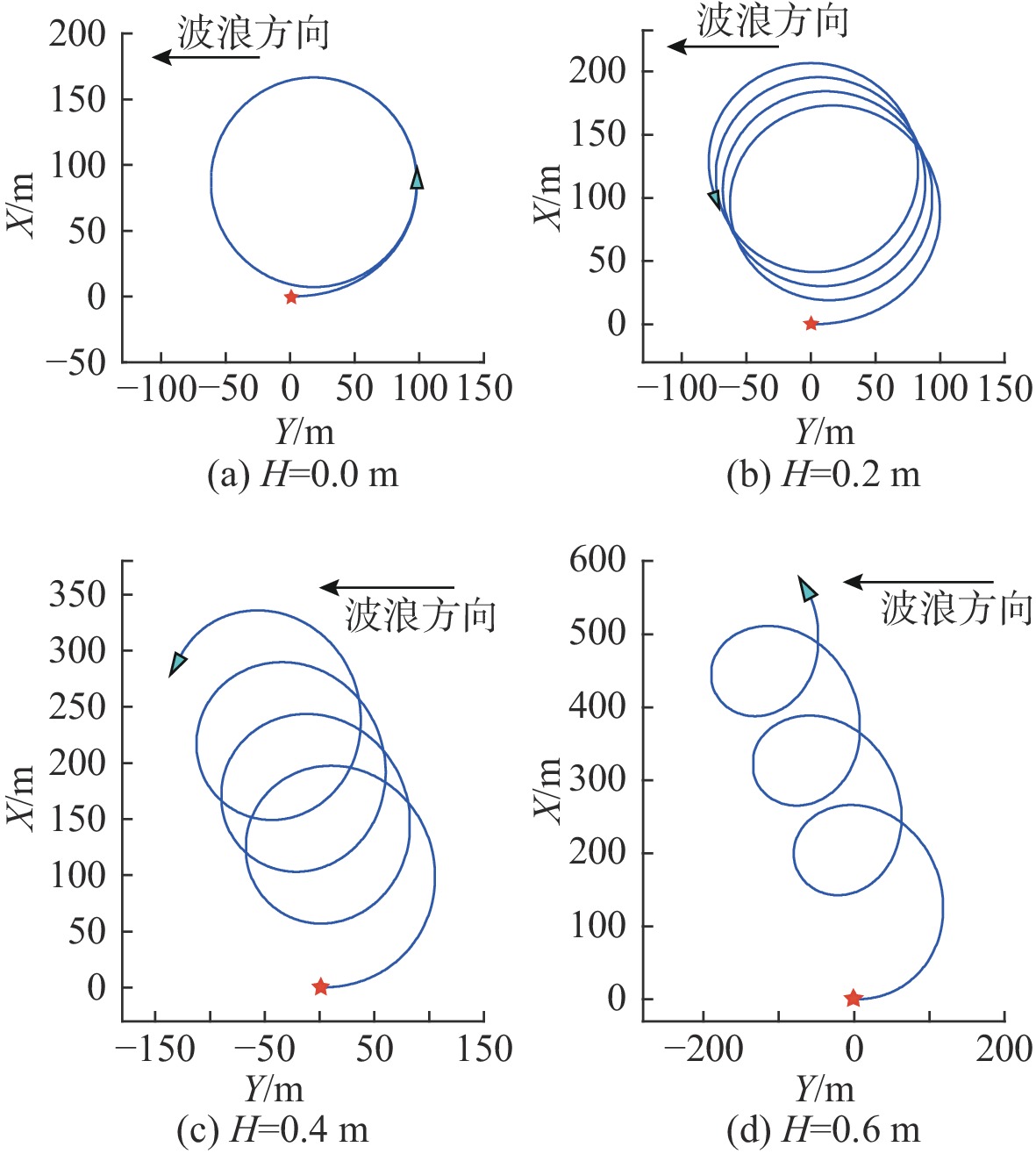
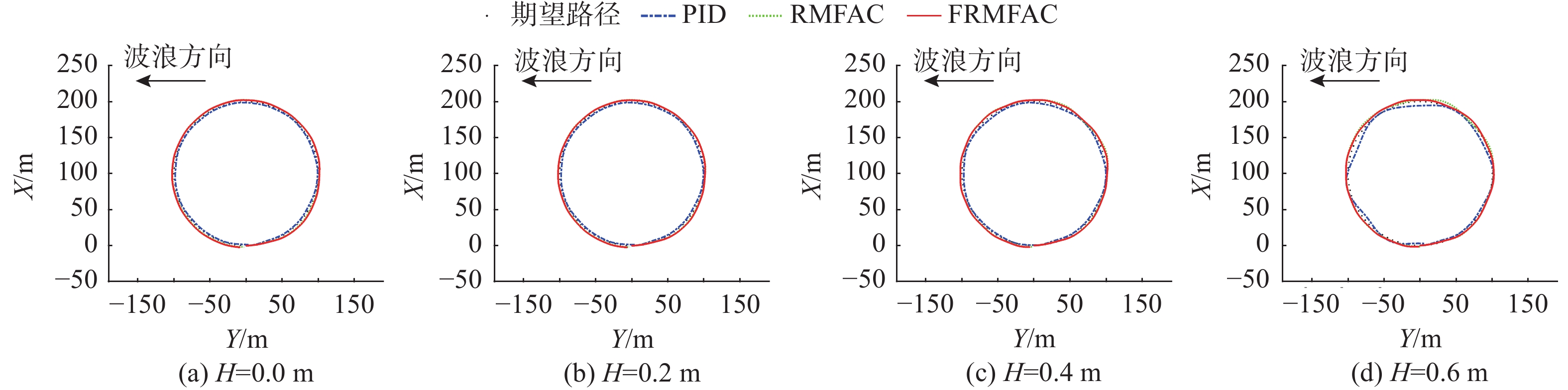
图 4 不同波高时无人艇回转轨迹
Figure 4. The rotation trajectory of the unmanned surface vessel at different wave heights
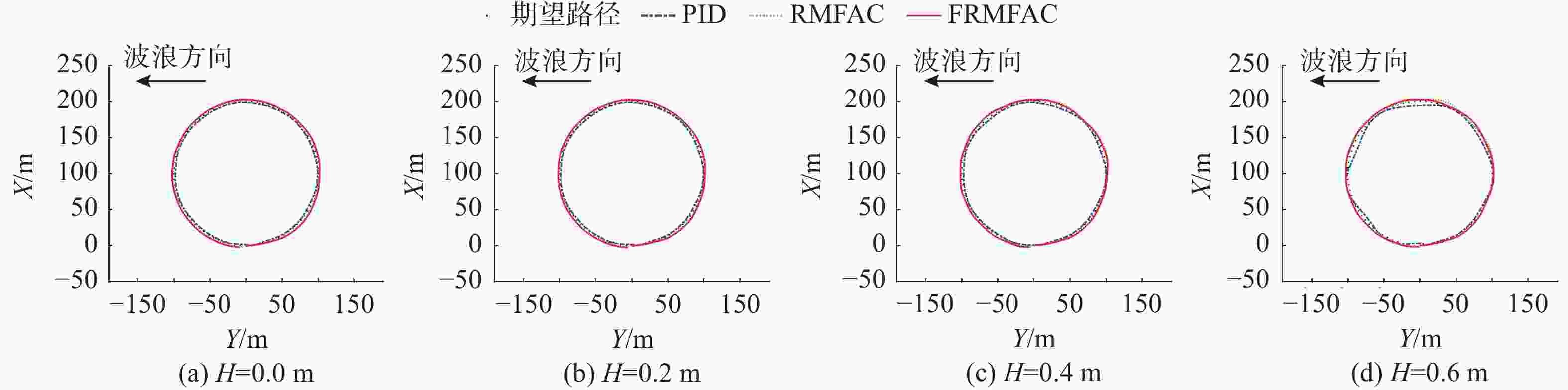
图 10 不同波高下控制仿真结果
Figure 10. Simulation results of different control methods at different wave heights
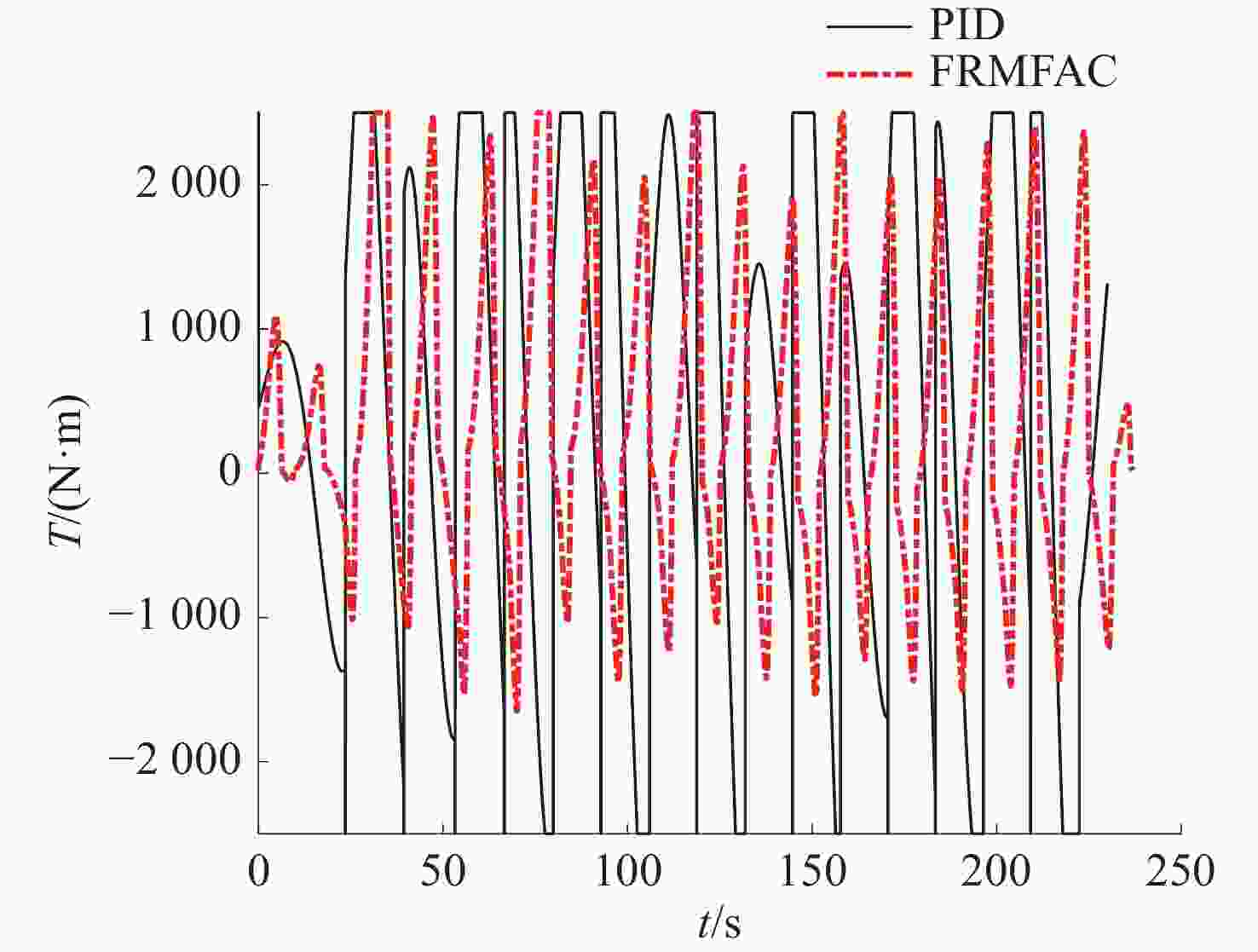
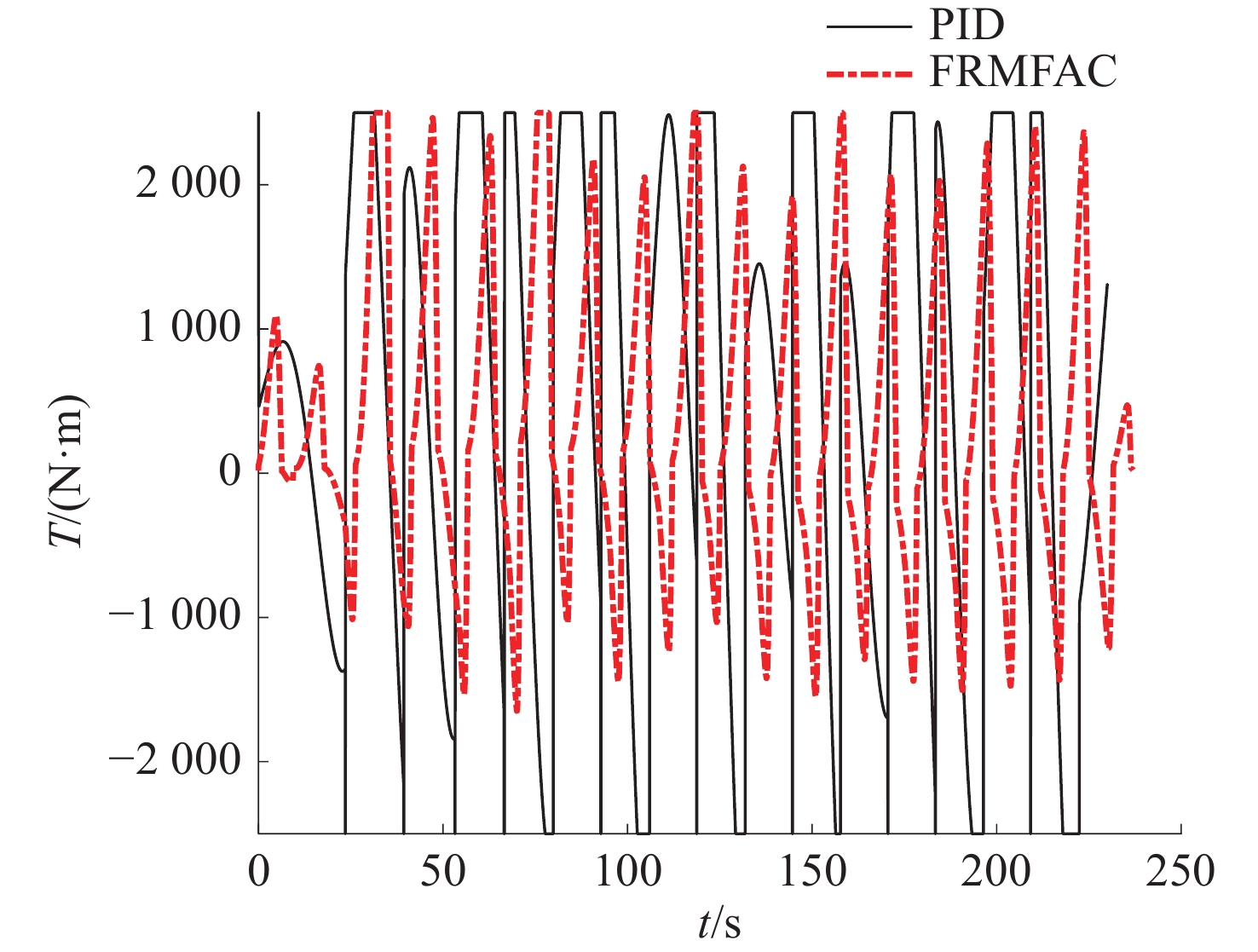
图 11 H=0.2 m时舵机提供的转艏力矩
Figure 11. Bow turning moment provided by steering gear at H=0.2 m
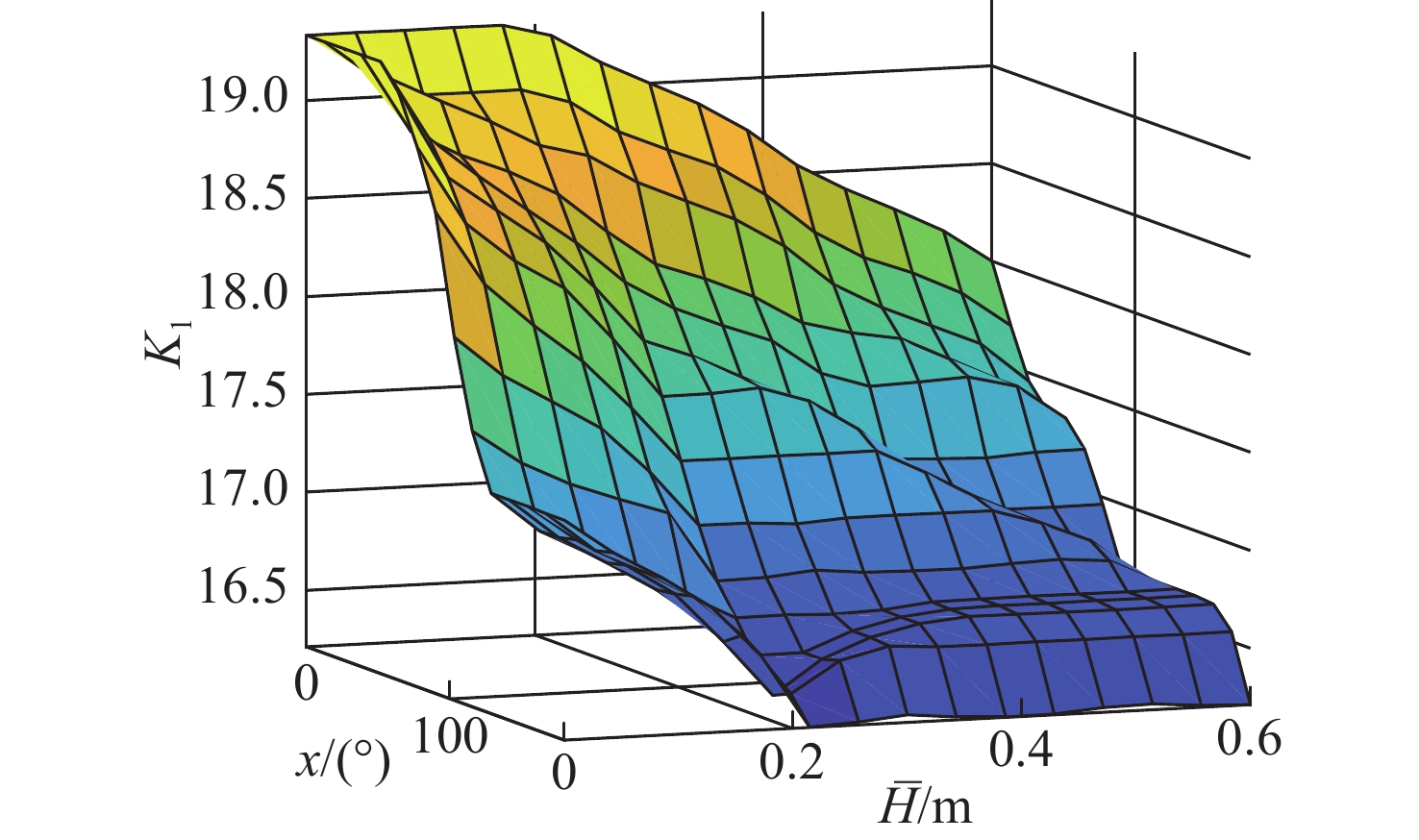
表 1
${K_1}$ 模糊控制规则Table 1.
${K_1}$ Fuzzy control rulesH $\chi $ NB NM NS ZO PS PM PB ZO PM PM PM PS NS NS NS PS PM PS ZO NS NM NB NB PM PS ZO NS NS NM NM NB PB ZO NS NS NM NM NM NB  下载: 导出CSV
下载: 导出CSV
表 2 不同控制方法的RMSE
Table 2. RMSE with different control methods
波高/m RRMSE/m PID RMFAC FRMFAC 0.0 0.998 1.157 1.224 0.2 0.994 1.159 1.188 0.4 1.032 1.158 1.179 0.6 1.120 1.206 1.180
下载: 导出CSV
表 3 跟踪圆形轨迹一周舵机的能耗情况
Table 3. Energy consumption of tracking circular trajectories one turn
波高/m PID RMFAC FRMFAC 能耗 节能效率/% 能耗 节能效率/% 0.0 39.50 30.55 22.7 28.67 27.4 0.2 41.22 31.37 23.9 29.15 29.3 0.4 45.51 31.74 30.3 31.25 31.3 0.6 49.52 44.95 9.23 40.14 18.9
下载: 导出CSV
-
[1] 王石, 张建强, 杨舒卉, 等. 国内外无人艇发展现状及典型作战应用研究[J]. 火力与指挥控制, 2019, 44(2): 11-15.Wang Shi, Zhang Jianqiang, Yang Shuhui, et al. Research on development status and combat applications of USVs in worldwide[J]. Fire Control & Command Control, 2019, 44(2): 11-15. [2] Caccia M, Bono R, Bruzzone G, et al. Sampling sea surfaces with SESAMO: An autonomous craft for the study of sea-air interactions[J]. IEEE Robotics Automation Magazine, 2005, 12(3): 95-105. doi: 10.1109/MRA.2005.1511873 [3] Desa E, Maurya P, Pereira A, et al. A small autonomous surface vehicle for ocean color remote sensing[J]. IEEE Journal of Oceanic Engineering, 2007, 32(2): 353-364. doi: 10.1109/JOE.2007.893688 [4] 王建国, 姜春萌, 吴方良, 等. 水下航行体的改进S面运动控制器[J]. 中国舰船研究, 2013, 8(5): 41-45.Wang Jianguo, Jiang Chunmeng, Wu Fangliang, et al. An improved S-plane controller for the motion control of underwater vehicles[J]. Chinese Journal of Ship Research, 2013, 8(5): 41-45. [5] 由丹丹, 廖煜雷, 董早鹏. 喷水推进无人艇航向的鲁棒S面控制方法[J]. 中南大学学报(自然科学版), 2013, 44(S1): 152-156.You Dandan, Liao Yulei, Dong Zaopeng. Robust S surface method for course control of USV with water-jet propulsion[J]. Journal of Central South University(Science and Technology), 2013, 44(S1): 152-156. [6] 高双, 朱齐丹, 李磊. 基于神经网络的高速无人艇模糊PID控制[J]. 系统仿真学报, 2007, 19(4): 776-779. doi: 10.3969/j.issn.1004-731X.2007.04.021Gao Shuang, Zhu Qidan, Li Lei. Fuzzy NN control of high-speed unmanned ship[J]. Journal of System Simulation, 2007, 19(4): 776-779. doi: 10.3969/j.issn.1004-731X.2007.04.021 [7] Zhang C J, Wang C, Wang J Q, et al. Neuro-adaptive trajectory tracking control of underactuated autonomous surface vehicles with high-gain observer[J]. Applied Ocean Research, 2020, 97: 102051. doi: 10.1016/j.apor.2020.102051 [8] 赵泽宇. 基于模糊PID的无人船航行姿态控制系统研究[D]. 海口: 海南大学, 2019. [9] 张金越, 郭健, 孙洪波, 等. 无人艇变论域模糊自整定PID航向控制[C]//第14届中国智能交通年会论文集, 青岛: 中国智能交通协会, 2019. [10] 张雪飞, 袁鹏, 谭俊哲, 等. 基于模糊PID的无人帆船航向控制方法[J]. 中国舰船研究, 2019, 14(6): 15-21.Zhang Xuefei, Yuan Peng, Tan Junzhe, et al. Heading control method of unmanned sailing boats based on Fuzzy PID[J]. Chinese Journal of Ship Research, 2019, 14(6): 15-21. [11] 张瀚文, 王俊雄. 基于自适应反步滑模的AUV推进器容错控制[J]. 水下无人系统学报, 2021, 29(4): 420-427.Zhang Hanwen, Wang Junxiong. Fault-tolerant control of AUV thruster based on adaptive backstepping sliding mode[J]. Journal of Unmanned Undersea Systems, 2021, 29(4): 420-427. [12] 廖煜雷. 无人艇的非线性运动控制方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2012. [13] 廖煜雷, 杜廷朋, 付悦文, 等. 无人艇重定义无模型自适应艏向控制方法与试验[J]. 哈尔滨工程大学学报, 2020, 41(1): 37-43.Liao Yulei, Du Tingpeng, Fu Yuewen, et al. The method and experiments of redefined model-free adaptive heading control of unmanned surface vehicle[J]. Journal of Harbin Engineering University, 2020, 41(1): 37-43. [14] 姜权权, 李可, 廖煜雷, 等. 自然能驱动无人艇融合TD滤波的无模型自适应航速控制方法[J]. 无人系统技术, 2020, 3(2): 37-42.Jiang Quanquan, Li Ke, Liao Yulei, et al. Model-free adaptive speed control method of natural energy-driven unmanned surface vehicle[J]. Unmanned Systems Technology, 2020, 3(2): 37-42. [15] 廖煜雷, 苏玉民, 张磊. 一种自适应人工鱼群算法及其在无人艇控制中的应用[J]. 中南大学学报(自然科学版), 2013, 44(10): 4109-4116.Liao Yulei, Su Yumin, Zhang Lei. Adaptive artificial fish swarm algorithm and application in control of unmanned surface vessel[J]. Journal of Central South University (Science and Technology), 2013, 44(10): 4109-4116. [16] 王晓慧, 黄刚, 丁洁, 等. 基于改进型ADRC算法的无人水面侦察艇轨迹跟踪[J]. 水下无人系统学报, 2021, 29(3): 286-292.Wang Xiaohui, Huang Gang, Ding Jie, et al. Trajectory tracking of unmanned surface reconnaissance vessel based on improved ADRC algorithm[J]. Journal of Unmanned Undersea Systems, 2021, 29(3): 286-292. [17] 黄雨杰, 张子唐, 孙骞, 等. 单向拓扑下基于DMPC与改进APF的水面无人艇编队运动控制算法[J]. 无人系统技术, 2022, 5(6): 1-11.Huang Yujie, Zhang Zitang, Sun Qian, et al. A formation motion control algorithm of unmanned surface vehicles based on DMPC and improved APF under unidirectional topologies[J]. Unmanned Systems Technology, 2022, 5(6): 1-11. [18] 侯忠生, 许建新. 数据驱动控制理论及方法的回顾和展望[J]. 自动化学报, 2009, 35(6): 650-667. doi: 10.3724/SP.J.1004.2009.00650Hou Zhongsheng, Xu Jianxin. On data-driven control theory: The state of the art and perspective[J]. Acta Automatica Sinica, 2009, 35(6): 650-667. doi: 10.3724/SP.J.1004.2009.00650 [19] 侯忠生, 金尚泰. 无模型自适应控制[M]. 北京: 科学出版社, 2013. [20] 杜廷朋. 面向UUV回收的无人艇抗扰运动控制方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2020. [21] 魏红艳. 无人艇区域保持控制方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2018. [22] 周韬. 基于非线性反馈的航向保持控制器优化设计[J]. 中国水运, 2019, 19(3): 92-93. [23] 冯永孝. 船舶航迹保持非线性模糊控制器的设计[D]. 大连: 大连海事大学, 2019. [24] Do K D, Pan J. Control of ships and underwater vehicles: Design for underactuated and nonlinear marine systems[M]. London: Springer-Verlag, 2009. [25] 吴恭兴. 无人艇操纵性与智能控制技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2011. [26] 孙立凯. 基于航速优化的船舶能耗研究[D]. 哈尔滨: 哈尔滨工程大学, 2019. [27] 贾欣乐, 杨盐生. 船舶运动数学模型——机理建模与辨识建模[M]. 大连: 大连海事大学出版社, 1999. [28] 刘国栋. 柴油机模糊自整定PID智能调速控制策略的研究[D]. 哈尔滨: 哈尔滨工程大学, 2012. [29] 李健. 基于模糊PID的无人水下机器人运动控制研究[D]. 大连: 大连理工大学, 2016. [30] 王磊, 孔祥利. 人机控制系统中操纵者两级控制模型[J]. 控制理论与应用, 1990, 7(3): 63-68.Wang Lei, Kong Xiangli. Operator two-level control model in man-machine control system[J]. Control theory and application, 1990, 7(3): 63-68. [31] Pettersen K Y, Egeland O. Exponential stabilization of an underactuated surface vessel[C]//Proceeding of 35th IEEE Conference on Decision and Control. Kobe, Japan: IEEE, 1996: 967-971. [32] 刘陆. 欠驱动无人船的路径跟踪与协同控制[D]. 大连: 大连海事大学, 2018. -

 下载:
下载:






 点击查看大图
点击查看大图
计量
- 文章访问数: 1204
- HTML全文浏览量: 178
- PDF下载量: 93
- 被引次数: 0