

ROV Motion Control Algorithm Based on RBF Neural Network Compensation
-
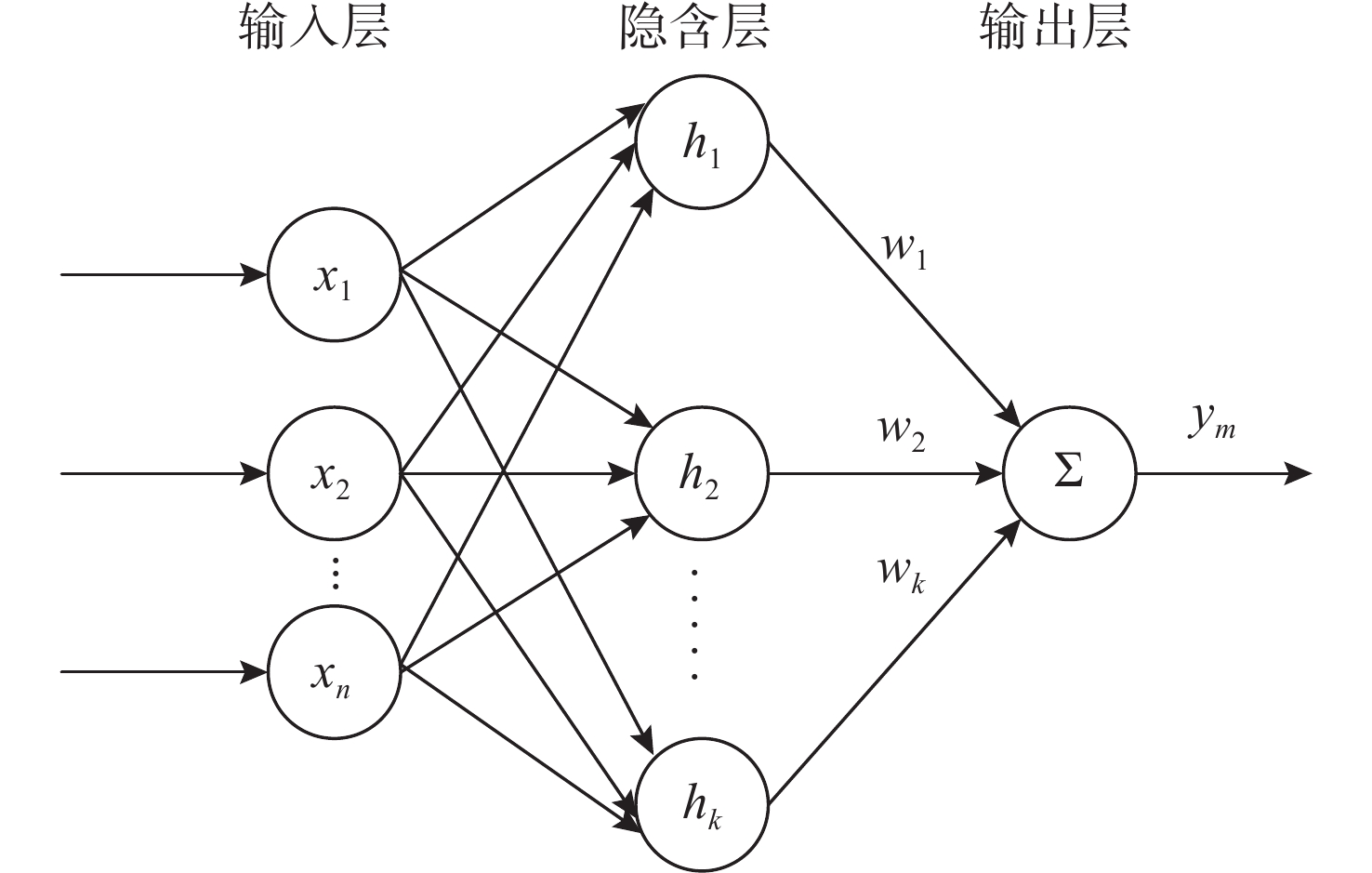
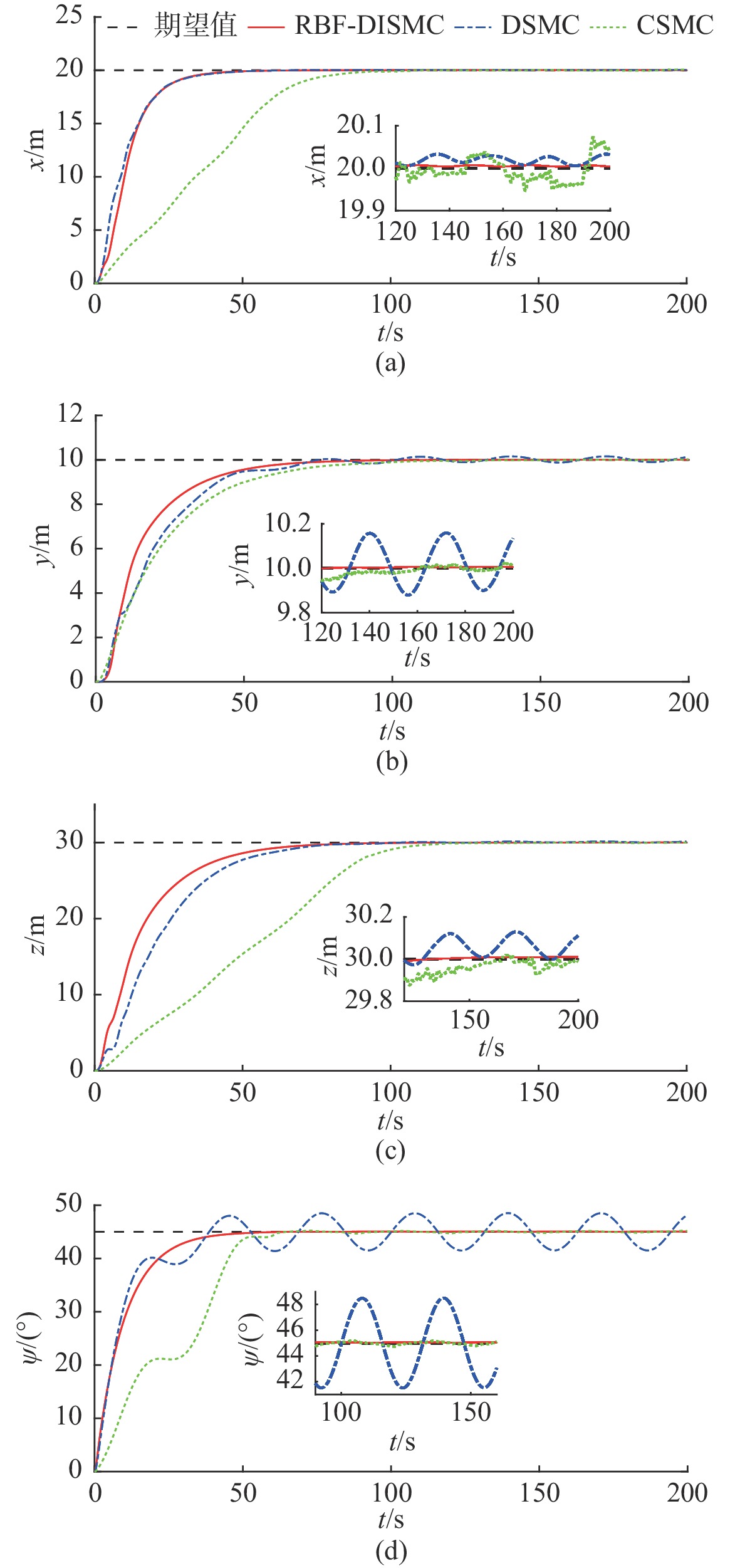
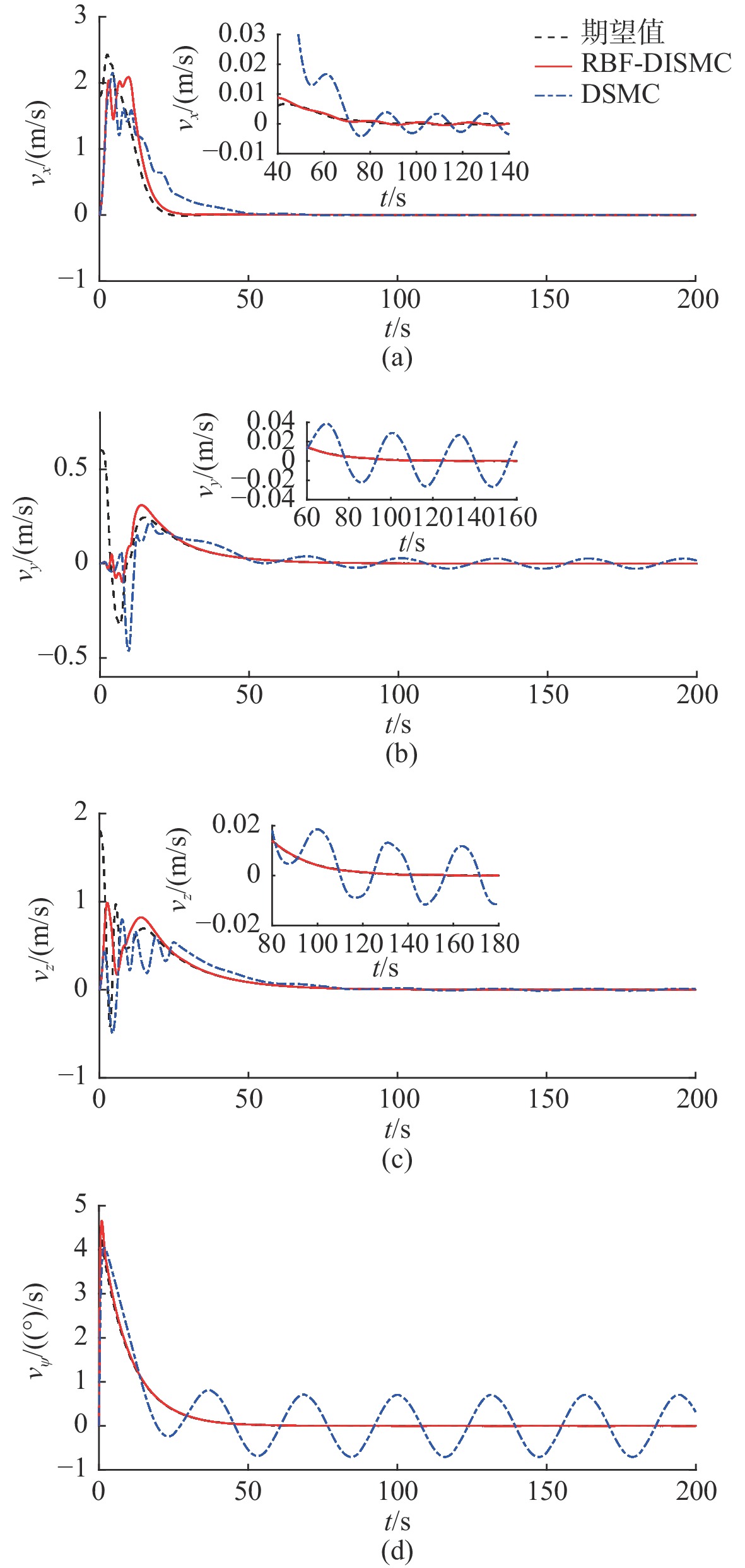
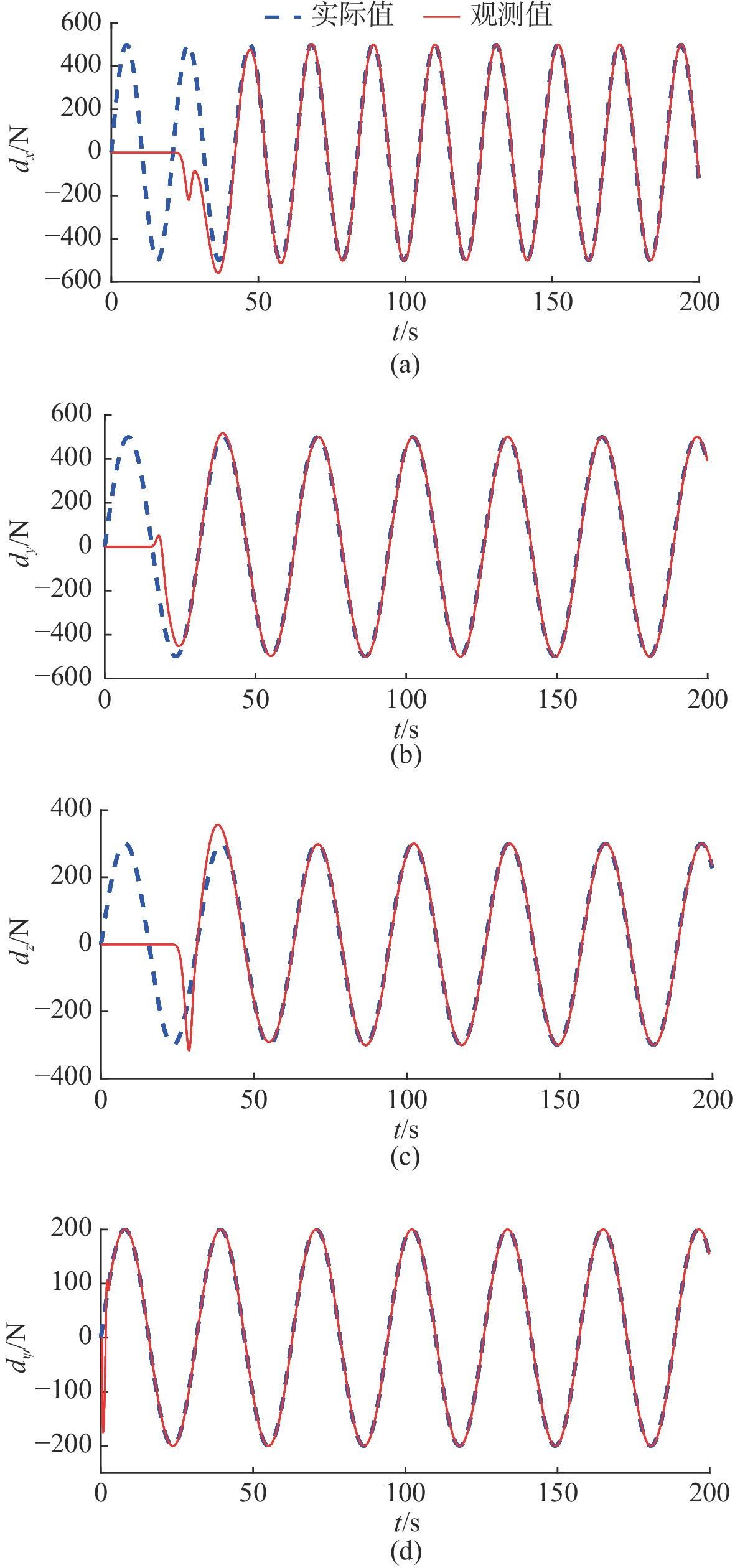
摘要: 针对作业型遥控水下航行器(ROV)在模型参数不确定和外部环境干扰下的运动控制问题, 提出了一种基于径向基函数(RBF)神经网络的自适应双环滑模控制策略。首先, 对于ROV外环位置控制采用改进趋近律的积分滑模控制方法, 对于ROV内环速度控制采用指数趋近律的积分滑模控制方法; 其次, 为进一步改善滑模控制的抖振问题, 引入双曲正切函数作为滑模切换项; 然后, 利用RBF神经网络控制技术对ROV模型的不确定参数和外部扰动进行估计与补偿; 最后, 利用李雅普诺夫稳定性理论证明了整个闭环系统的稳定性, 并对作业型ROV的运动控制进行了数值仿真。仿真结果验证了所设计的控制器可以实现ROV航行的精确控制, 并能够有效抑制模型不确定参数和外部扰动对ROV运动的影响。Abstract: In view of the motion control problem of the operation-type remotely operated vehicles(ROVs) under the uncertainty of model parameters and the disturbance of the external environment, an adaptive double-loop sliding mode control strategy based on radial basis function(RBF) neural network was proposed. Firstly, the integral sliding mode control method with an improved reaching law was adopted for controlling the position of the ROV’s outer loop, and the integral sliding mode control method with an exponential reaching law was adopted for controlling the speed of the ROV’s inner loop. Secondly, in order to further improve the chattering problem of sliding mode control, the hyperbolic tangent function was introduced as the sliding mode switching term. Subsequently, the RBF neural network control technology was used to estimate and compensate for the uncertain parameters and external disturbances of the ROV model. Finally, the stability of the whole closed-loop system was proved by using the Lyapunov stability theory, and the motion control of the operation-type ROV was simulated numerically. The simulation results verify that the controller designed in this paper can achieve precise control of ROV navigation and effectively suppress the influence of uncertain parameters of the model and external disturbances on ROV motion.
-
表 1 控制算法仿真性能比较
Table 1. Comparison of simulation performance of control algorithms
t′ 性能参数 CSMC DSMC RBF-DISMC $ {t_x} $/s 86.9 28.2 28.0 $ {t_y} $/s 67.6 51.1 47.9 $ {t_z} $/s 119.4 57.6 49.0 $ {t_\psi } $/s 47.8 36.0 29.6 $ {{{M}}_{{\text{MAE}}}} $ $ {x_m} $/m 0.108 6 0.071 2 0.057 6 $ {y_m} $/m 0.075 5 0.122 6 0.054 1 $ {z_m} $/m 0.217 2 0.186 0 0.163 5 $ {\psi _m} $/(°) $0.003\;2$ $0.038\;0$ $0.002\;7$ $ {R_{{\text{RMSE}}}} $ $ {x_r} $/m 0.225 9 0.172 6 0.162 8 $ {y_r} $/m 0.133 8 0.170 3 0.115 4 $ {z_r} $/m 0.404 1 0.353 6 0.350 6 $ {\psi _r} $/(°) $0.006\;7$ $0.042\;3$ $0.006\;6$  下载: 导出CSV
下载: 导出CSV
-
[1] Jiang Z, Lu B, Wang, B, et al. A prototype design and sea trials of an 11 000 m autonomous and remotely-operated vehicle dream chaser[J]. Journal of Marine Science & Engineering, 2022, 10(6): 812. [2] Sahoo A, Dwivedy S K, Robi P S. Advancements in the field of autonomous underwater vehicle[J]. Ocean Engineering, 2019, 181(1): 145-160. [3] Muthugala M, Samarakoon S, Elara M R. Toward energy-efficient online complete coverage path planning of a ship hull maintenance robot based on glasius bio-inspired neural network[J]. Expert Systems with Application, 2022, 187: 115940. doi: 10.1016/j.eswa.2021.115940 [4] Song C, Cui W. Review of underwater ship hull cleaning technologies[J]. Journal of Marine Science & Application, 2020, 19(3): 415-429. [5] Sveinung J O, Herman B A, Walter C, et al. Robust adaptive backstepping DP control of ROVs[J]. Control Engineering Practice, 2022, 127: 105282. doi: 10.1016/j.conengprac.2022.105282 [6] Tran H N, Pham T N N, Choi S H. Robust depth control of a hybrid autonomous underwater vehicle with propeller torque’s effect and model uncertainty[J]. Ocean Engineering, 2021, 220: 108257. doi: 10.1016/j.oceaneng.2020.108257 [7] Zan Y, Qiu T, Yuan L, et al. Autonomous remotely operated vehicle return control in a narrow underwater environment[J]. CAAI Transactions on Intelligent Systems, 2022, 17(4): 744-751. [8] Long C, Hu M, Qin X, et al. Hierarchical trajectory tracking control for ROVs subject to disturbances and parametric uncertainties[J]. Ocean Engineering, 2022, 266: 112733. doi: 10.1016/j.oceaneng.2022.112733 [9] Zhou H, Cao J, Yao B, et al. Hierarchical NMPC-ISMC of active heave motion compensation system for TMS-ROV recovery[J]. Ocean Engineering, 2021, 239: 109834. doi: 10.1016/j.oceaneng.2021.109834 [10] Zhu D, Zhang H, Liu C. Tracking controller based on model prediction control for remotely operated vehicle for thruster fault[J]. Journal of Marine Engineering & Technology, 2022, 27(2): 840-855. [11] Chen H, Tang G, Huang Y, et al. Adaptive model-parameter-free nonsingular fixed-time sliding mode control for underwater cleaning vehicle[J]. Ocean Engineering, 2022, 262: 112239. doi: 10.1016/j.oceaneng.2022.112239 [12] Yang M, Sheng Z, Yin G, et al. A recurrent neural network based fuzzy sliding mode control for 4-DOF ROV movements[J]. Ocean Engineering, 2022, 256: 111509. doi: 10.1016/j.oceaneng.2022.111509 [13] Li M, Yu C, Zhang X, et al. Fuzzy adaptive trajectory tracking control of work-class ROVs considering thruster dynamics[J]. Ocean Engineering, 2023, 267: 113232. doi: 10.1016/j.oceaneng.2022.113232 [14] Lamraoui H C, Qidan Z. Path following control of fully-actuated autonomous underwater vehicle in presence of fast-varying disturbances[J]. Applied Ocean Research, 2019, 86: 40-46. doi: 10.1016/j.apor.2019.02.015 [15] Zhang Z, Liu B, Wang L. Autonomous underwater vehicle depth control based on an improved active disturbance rejection controller[J]. International Journal of Advanced Robotic Systems, 2019, 16(6): 39-48. [16] Joe H, Kim M, Yu S C. Second-order sliding-mode controller for autonomous underwater vehicle in the presence of unknown disturbances[J]. Nonlinear Dyn, 2014, 78: 183-196. doi: 10.1007/s11071-014-1431-0 [17] Munoz-Vazquez A J, Ramirez-Rodriguez H, Parra-Vega V, et al. Fractional sliding mode control of underwater ROVs subject to non-differentiable disturbances[J]. International Journal of Control Automation and Systems, 2017, 15(3): 1314-1321. doi: 10.1007/s12555-015-0210-0 [18] Qiao L, Zhang W. Adaptive second-order fast nonsingular terminal sliding mode tracking control for fully actuated autonomous underwater vehicles[J]. Ocean Engineering, 2018, 44: 363-385. [19] Xu J, Wang M, Qiao L. Dynamical sliding mode control for the trajectory tracking of underactuated unmanned underwater vehicles[J]. Ocean Engineering, 2015, 105: 54-63. doi: 10.1016/j.oceaneng.2015.06.022 [20] Huang B, Yang Q. Double-loop sliding mode controller with a novel switching term for the trajectory tracking of work-class ROVs[J]. Ocean Engineering, 2019, 178: 80-94. doi: 10.1016/j.oceaneng.2019.02.043 [21] Yan Y, Yu S. Sliding mode tracking control of autonomous underwater vehicles with the effect of quantization[J]. Ocean Engineering, 2018, 151: 322-328. doi: 10.1016/j.oceaneng.2018.01.034 [22] Garcia-Valdovinos L G, Fonseca-Navarro F, Aizpuru-Zinkunegi J, et al. Neuro-sliding control for underwater ROV’s subject to unknown disturbances[J]. Sensors, 2019, 19: 2943. doi: 10.3390/s19132943 [23] Ding Z, Wang H, Sun Y, et al. Adaptive prescribed performance second-order sliding mode tracking control of autonomous underwater vehicle using neural network-based disturbance observer[J]. Ocean Engineering, 2022, 260: 111939. doi: 10.1016/j.oceaneng.2022.111939 [24] Patre B M, Londhe P S, Waghmare L M, et al. Disturbance estimator based nonsingular fast fuzzy terminal sliding mode control of an autonomous underwater vehicle[J]. Ocean Engineering, 2018, 159(1): 372-387. [25] Han L, Tang G, Cheng M, et al. Adaptive nonsingular fast terminal sliding mode tracking control for an underwater vehicle-manipulator system with extended state observer[J]. Journal of Marine Science & Engineering, 2021, 9(5): 501. [26] Shtessel Y, Taleb M, Plestan F. A novel adaptive-gain supertwisting sliding mode controller: Methodology and application[J]. Automatica, 2012, 48: 759-769. doi: 10.1016/j.automatica.2012.02.024 [27] 朱康武, 顾临怡. 作业型遥控水下运载器的多变量Backstepping鲁棒控制[J]. 控制理论与应用, 2011, 28(10): 1441-1446. [28] 范士波. 深海作业型ROV水动力试验及运动控制技术研究 [D]. 上海: 上海交通大学, 2013. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 946
- HTML全文浏览量: 434
- PDF下载量: 135
- 被引次数: 0

图(7) / 表(1)




