Path Optimization of Underwater Glider Based on Depth-averaged Current Prediction Model
-
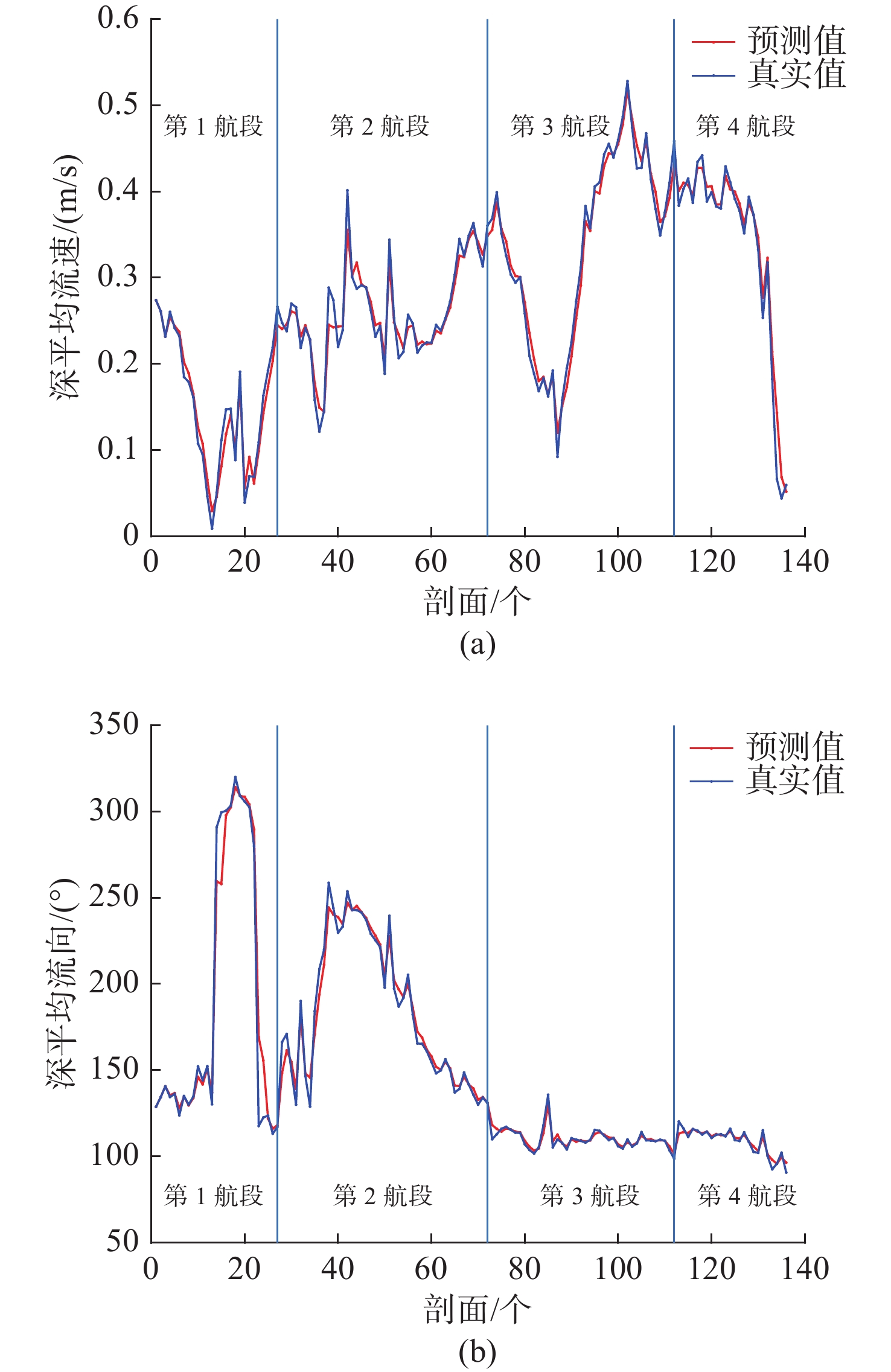
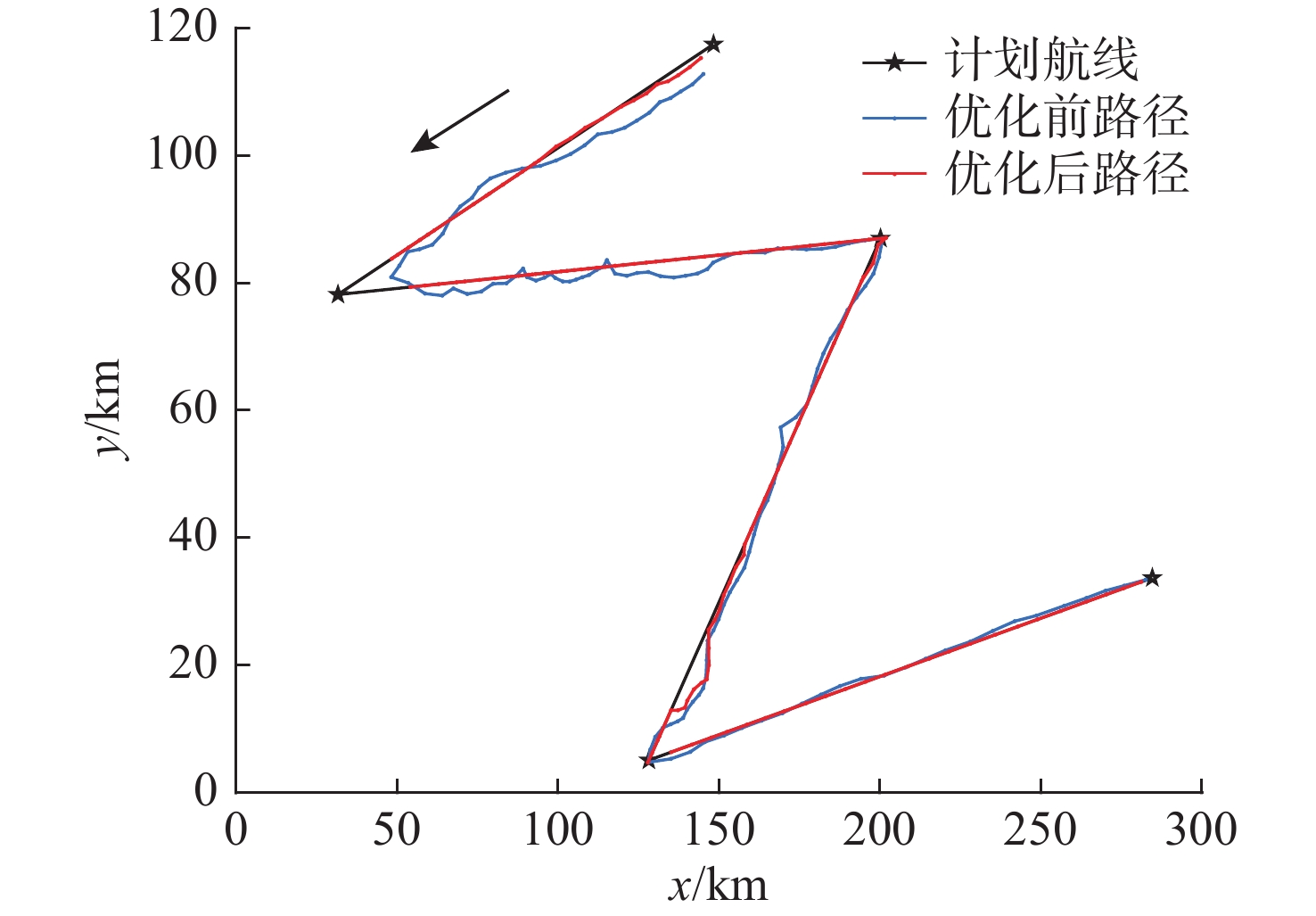
摘要: 随着水下滑翔机在海洋调查及声学探测领域的广泛运用, 精准、高效控制其路径对精细化海洋观测至关重要。针对水下滑翔机受海流影响产生较大偏航差问题, 采用最小二乘支持向量机法(LSSVM)预测深平均流, 以单剖面偏航差最小为目标函数, 以实际航向与计划航向夹角不超过一定值为约束条件, 构建非线性约束极值模型, 确定预设剖面最优目标航向及出水点坐标, 从而实现路径优化目的。采用“海燕-II”型水下滑翔机历史数据进行验证, 结果表明: 1) LSSVM法预测深平均流准确性较高, 但当局部流向有明显变化时预测效果不佳, 取前3个剖面数据作为训练样本时预测效果更好; 2) 采用文中方法优化后, 水下滑翔机路径更稳定, 各剖面偏航差平均为281.1 m。Abstract: With the wide application of underwater gliders in the field of ocean surveying and underwater acoustic detection, accurate and efficient control of their path is important for refined ocean observation. In view of the problem that the underwater glider has a large path deviation due to the influence of current, the least-squares support vector machine (LSSVM) method is used to predict the depth-averaged current. The minimum path deviation of a single profile is taken as the objective function, with the constraint condition that the difference between the actual and planned heading does not exceed a certain value. A nonlinear constraint extremum model is constructed, and the optimal target heading and outlet point coordinate are calculated, to realize the goal of path optimization. The historical data of the Petrel-II glider are used for verification, and the following results are obtained. 1) The LSSVM method has high accuracy in predicting the depth-averaged current, however, its prediction accuracy is poor when the local current direction changes significantly. The prediction accuracy is higher when the first three historical profile data are used as training samples. 2) Following path optimization with the proposed method, the path of the glider is more stable, and the average path deviation is 281.1 m.
-
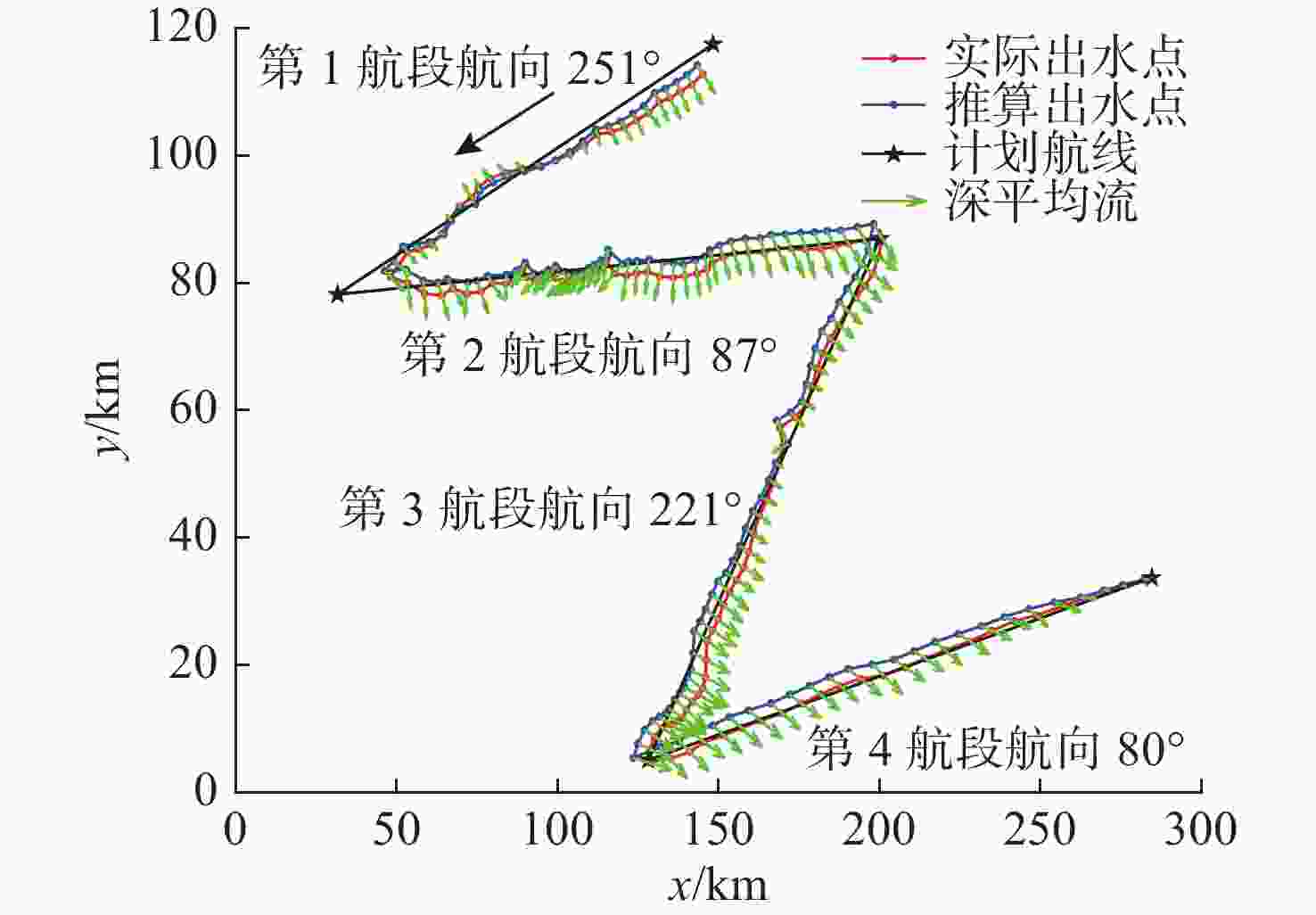
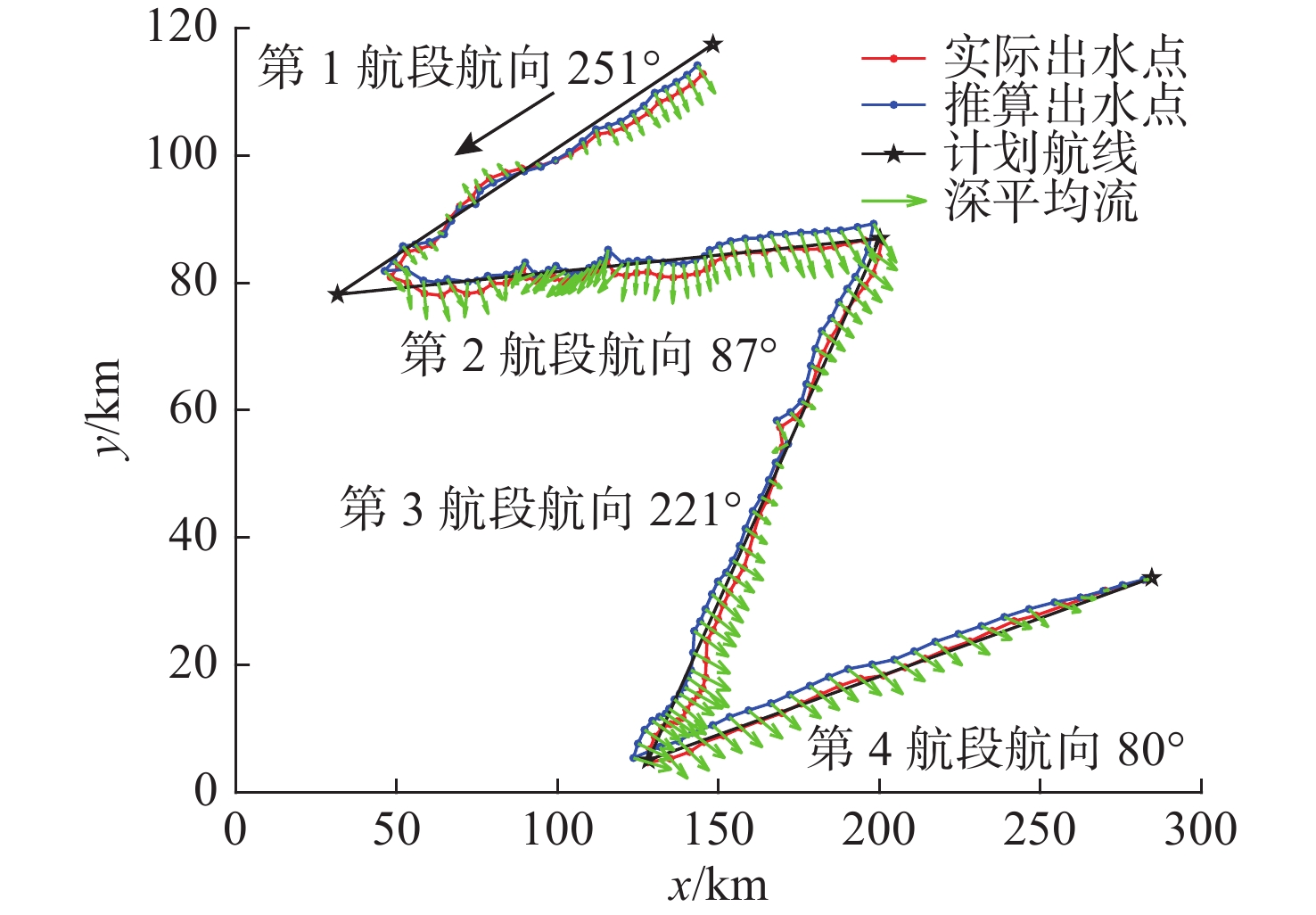
图 3 水下滑翔机航线及深平均流分布图
Figure 3. Underwater glider route and depth-averaged current distribution
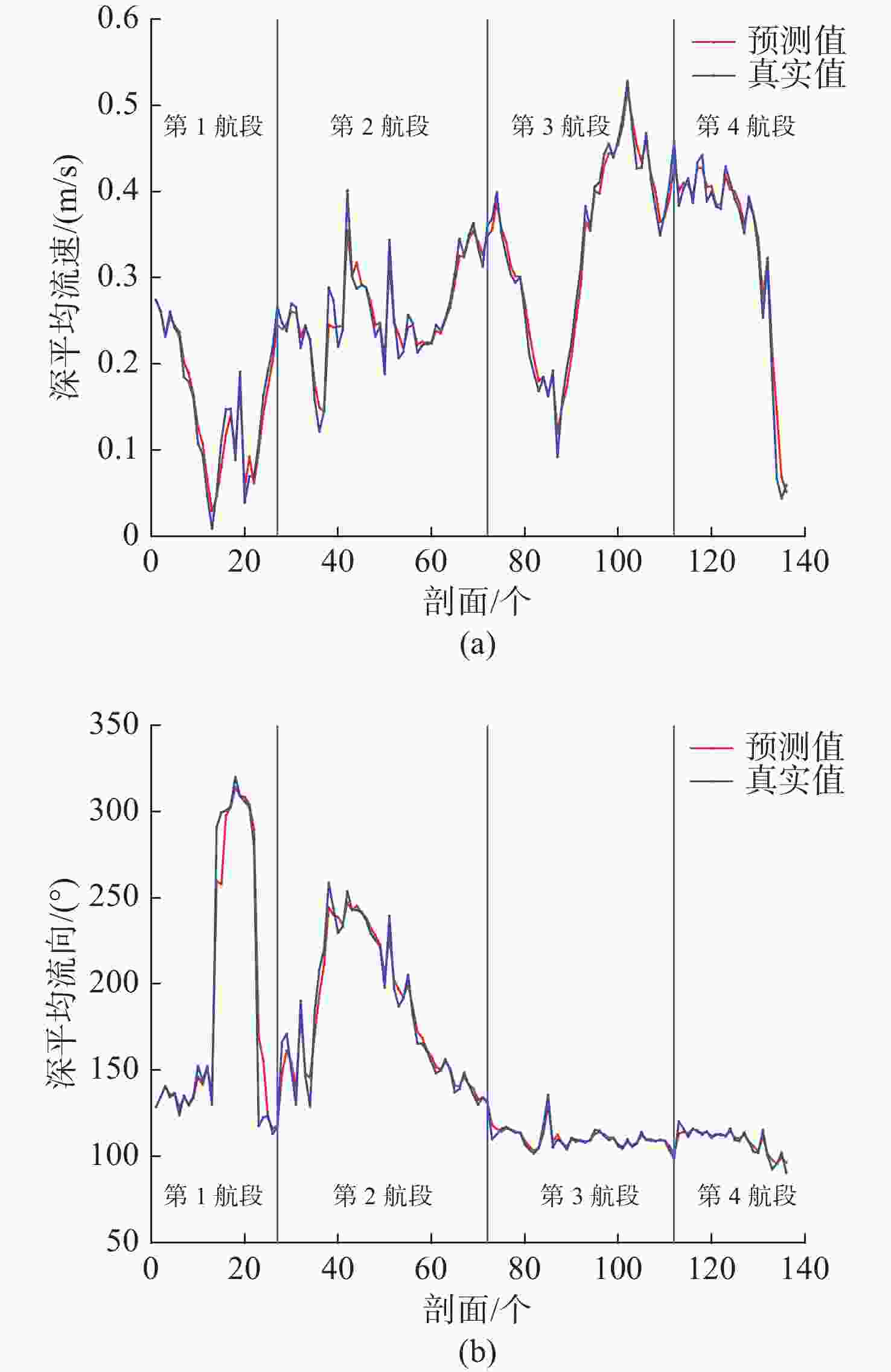
图 4 取前3个剖面预测深平均流对比图
Figure 4. Comparison of predicted depth-averaged current of the first three sections
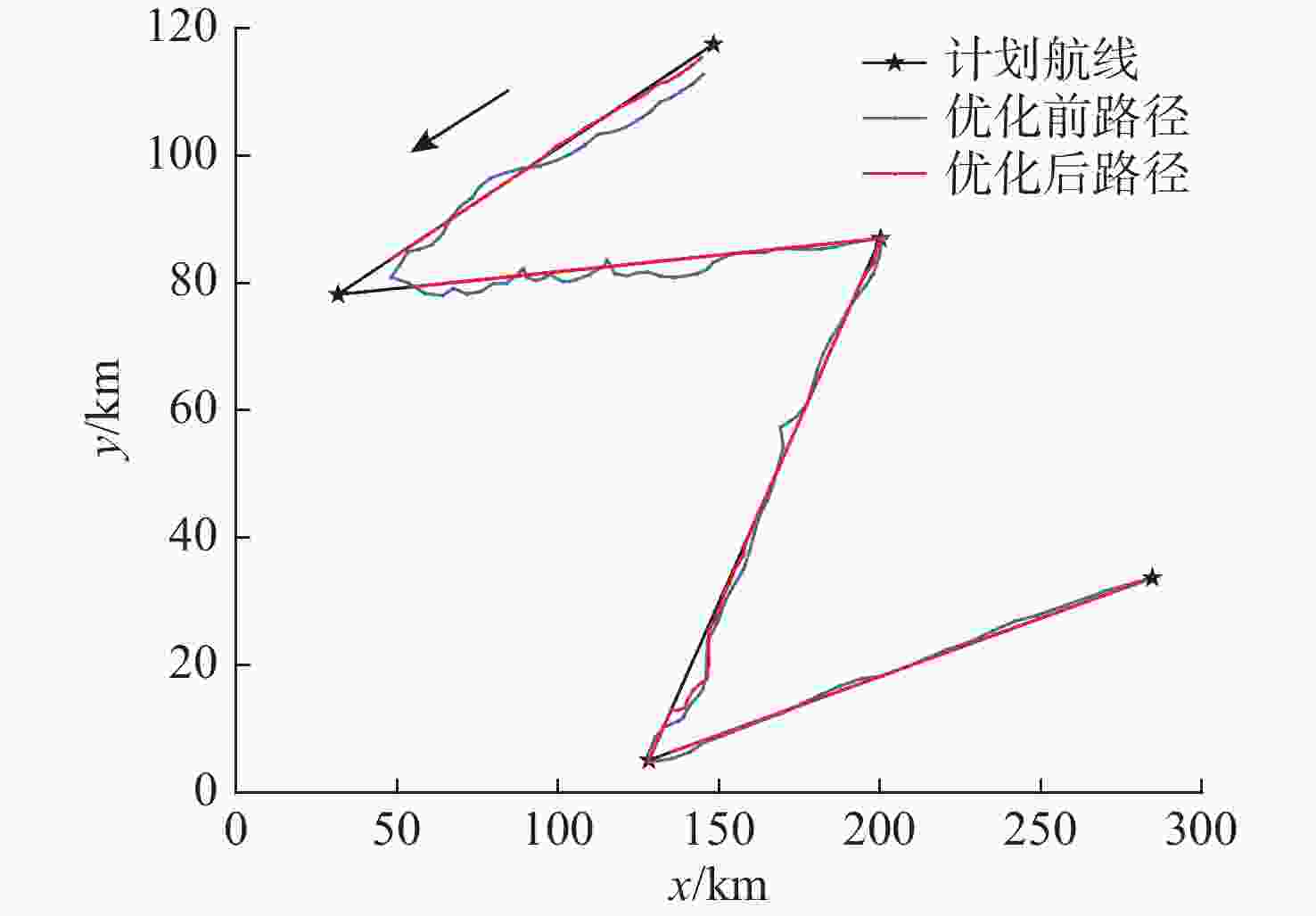
图 5 优化前后水下滑翔机航行路径对比图
Figure 5. Comparison of underwater glider navigation path before and after optimization
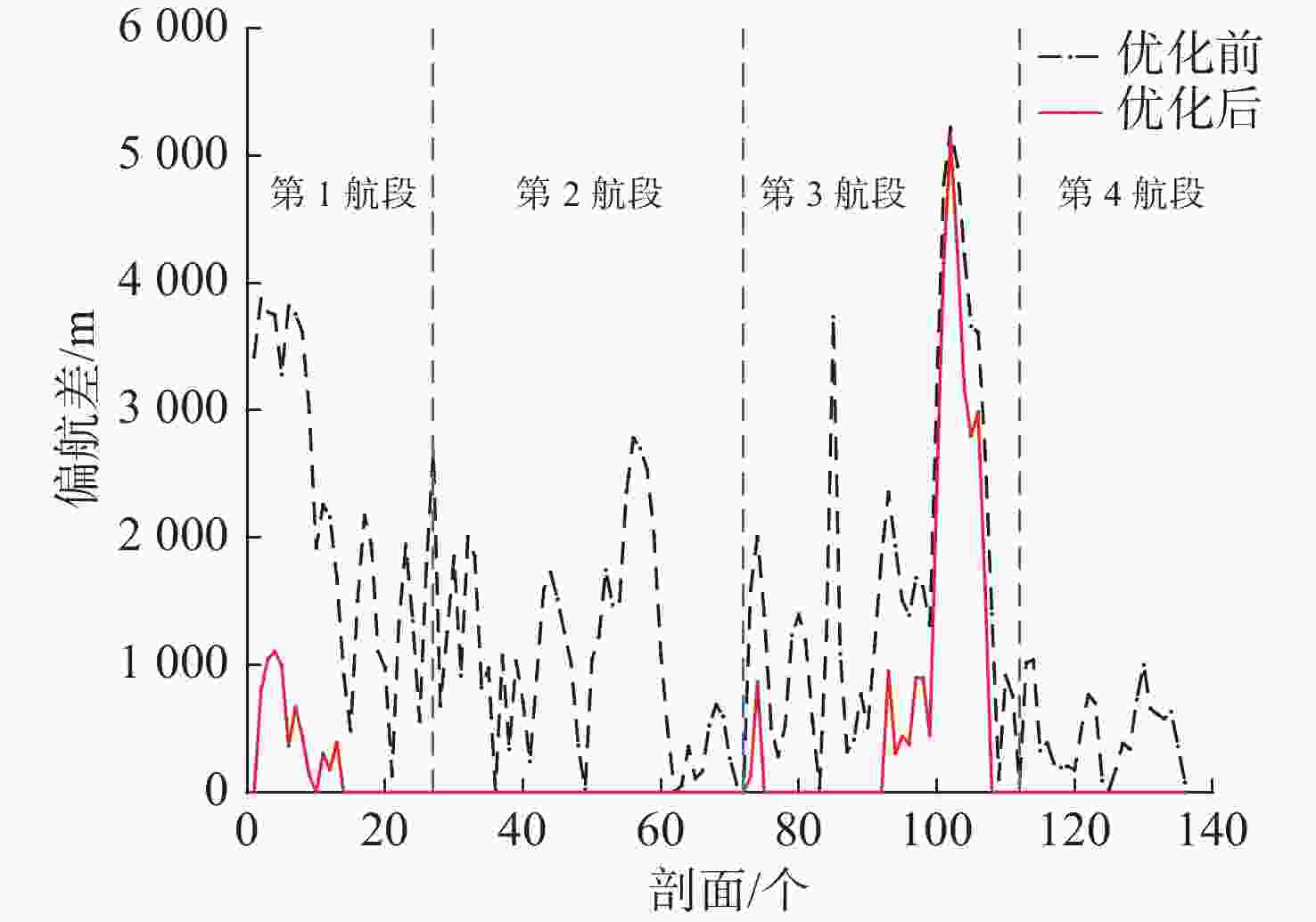
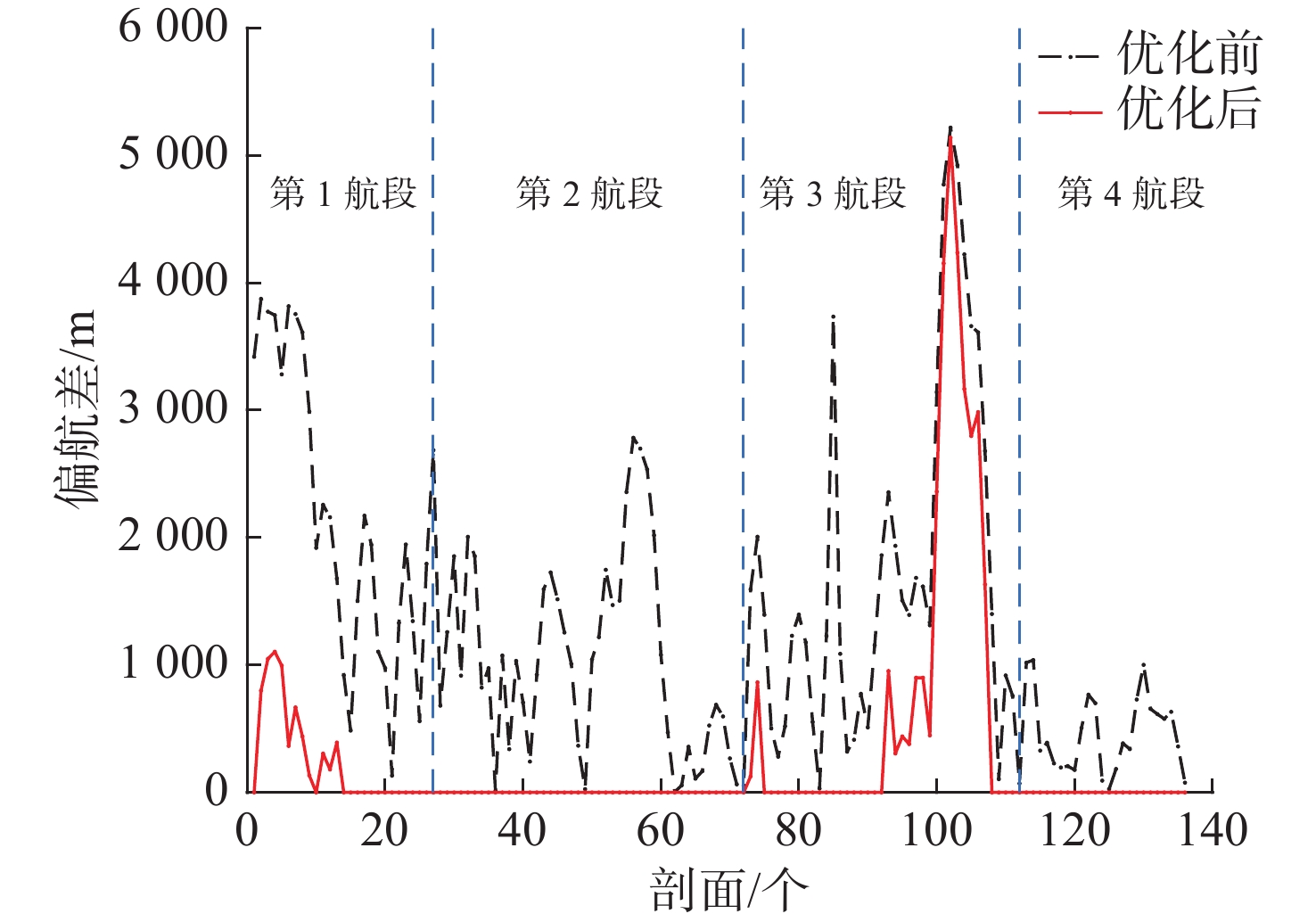
图 6 优化前后水下滑翔机各剖面偏航差对比图
Figure 6. Comparison of profile path deviation of underwater glider before and after optimization
表 1 水下滑翔机剖面信息统计表
Table 1. Profile information statistics of underwater glider
统计要素 最小值 最大值 平均值 标准差 运行时间/min 143.00 163.00 151.90 8.70 静水航速/(m/s) 0.41 0.69 0.54 0.05 实际航速/(m/s) 0.13 0.95 0.47 0.16 深平均流/(m/s) 0.01 0.53 0.28 0.12  下载: 导出CSV
下载: 导出CSV
表 2 深平均流预测误差统计
Table 2. Error statistics of predicted depth-averaged current
深平
均流剖面数 均方根误差 系数 最小
误差最大误差 误差均值 流速
/(m/s)3 0.016 0.992 −0.046 0.077 0.000 8 4 0.018 0.988 −0.056 0.057 0.001 1 5 0.020 0.986 −0.059 0.059 0.001 0 6 0.022 0.983 −0.068 0.068 0.001 2 流向
/(°)3 8.200 0.990 −41.500 51.600 0.200 0 4 10.200 0.988 −44.100 75.100 0.500 0 5 10.100 0.986 −40.300 70.400 0.500 0 6 13.000 0.976 −66.700 75.900 0.300 0
下载: 导出CSV
-
[1] 陈质二, 俞建成, 张艾群. 面向海洋观测的长续航力移动自主观测平台发展现状与展望[J]. 海洋技术学报, 2016, 35(1): 122-130.Chen Zhier, Yu Jiancheng, Zhang Aiqun. Overview on observation-oriented unmanned marine vehicles with high cruising ability: Development status and prospect[J]. Journal of Ocean Technology, 2016, 35(1): 122-130. [2] 杨绍琼, 成丹, 陈光耀. 面向典型海洋现象观测的水下滑翔机应用综述[J]. 热带海洋学报, 2022, 41(3): 54-74.Yang Shaoqiong, Cheng Dan, Chen Guangyao. Review on the application of underwater gliders for observing typical ocean phenomena[J]. Journal of Tropical Oceanography, 2022, 41(3): 54-74. [3] 沈新蕊, 王延辉, 杨绍琼, 等. 水下滑翔机技术发展现状与展望[J]. 水下无人系统学报, 2018, 26(2): 89-106.Shen Xinrui, Wang Yanhui, Yang Shaoqiong, et al. Development of underwater gliders: An overview and prospect[J]. Journal of Unmanned Undersea Systems, 2018, 26(2): 89-106. [4] 顾建农, 张志宏, 王冲, 等. 海流对水下滑翔机运动参数的影响[J]. 海军工程大学学报, 2018, 30(4): 1-7.Gu Jiannong, Zhang Zhihong, Wang Chong, et al. Influence of ocean current on motion parameter of underwater glider[J]. Journal of Naval University of Engineering, 2018, 30(4): 1-7. [5] Ramos A G, Garcia-Garrido V J, Mancho A M, et al. Lagrangian coherent structure assisted path planning for transoceanic autonomous underwater vehicle missions[J]. Scientific Reports, 2018, 8(1): 4575. doi: 10.1038/s41598-018-23028-8 [6] Shih C C, Hong M F, Chen C Y. A parallel genetic approach to path-planning with upstream current avoidance for multi-AUG deployment[J]. Soft Computing, 2020, 24(11): 8427-8441. doi: 10.1007/s00500-019-04409-1 [7] Nicolai V O B, Zhou M X, Taimaz B, et al. Overview of a new ocean glider navigation system: OceanGNS[J]. Frontiers in Marine Science, 2021, 12(8): 296-308. [8] 桑宏强, 于佩元, 孙秀军. 基于航向补偿的水下滑翔机路径跟踪控制方法[J]. 水下无人系统学报, 2019, 27(5): 541-547.Sang Hongqiang, Yu Peiyuan, Sun Xiujun. Path tracking control method of underwater glider based on heading compensation[J]. Journal of Unmanned Undersea Systems, 2019, 27(5): 541-547. [9] 宋大雷, 臧文川, 郭婷婷, 等. 水下滑翔机长航程全局路径规划[J]. 控制工程, 2020, 27(10): 1680-1685.Song Dalei, Zang Wenchuan, Guo Tingting, et al. Global path planning for long range voyage of underwater gliders[J]. Control Engineering of China, 2020, 27(10): 1680-1685. [10] 朱心科, 侯斐, 孟肯, 等. 较强海流中的低速水下机器人路径优化[J]. 海洋技术学报, 2021, 40(6): 54-60.Zhu Xinke, Hou Fei, Meng Ken, et al. The path plan for the low speed autonomous underwater vehicle in stronger ocean current[J]. Journal of Ocean Technology, 2021, 40(6): 54-60. [11] Merckelbach L M, Briggs R D, Smeed D A, et al. Current measurements from autonomous underwater gliders[C]//9th IEEE/OES Working Conference on Current Measurement Technology. Piscataway, NJ, USA: IEEE, 2008: 61-67. [12] Smith R N, Kelly J, Chao Y, et al. Towards the improvement of autonomous glider navigational accuracy through the use of regional ocean models[C]//ASME 2010 29th International Conference on Ocean, Offshore and Arctic Engineering. New York, NY, USA: ASME, 2010: 597-606. [13] Chang D, Zhang F, Edwards C R. Real-time guidance of underwater gliders assisted by predictive ocean models[J]. Journal of Atmospheric and Oceanic Technology, 2015, 32(3): 562-578. doi: 10.1175/JTECH-D-14-00098.1 [14] 周耀鉴, 刘世杰, 俞建成, 等. 基于局部流场构建的水下滑翔机路径规划[J]. 机器人, 2018, 40(1): 1-7.Zhou Yaojian, Liu Shijie, Yu Jiancheng, et al. Underwater glider path planning based on local flow field construction[J]. Robot, 2018, 40(1): 1-7. [15] 何柏岩, 杜金辉, 杨绍琼, 等. 基于VMD-LSSVM的水下滑翔机深平均流预测[J]. 天津大学学报(自然科学与工程技术版), 2021, 54(4): 388-396.He Baiyan, Du Jinhui, Yang Shaoqiong, et al. Prediction of underwater glider depth-averaged current velocity based on VMD-LSSVM[J]. Journal of Tianjin University (Science and Technology), 2021, 54(4): 388-396. [16] Zhou Y, Liu S, Zhang Y, et al. Method for predicting depth-averaged current velocities of underwater gliders based on data feature analysis[J]. AIP Advances, 2021, 11(7): 075203. doi: 10.1063/5.0058318 [17] 刘凡俊, 李登有. 球面的距离公式及其应用[J]. 数学教学研究, 2013, 32(3): 39-40. doi: 10.3969/j.issn.1671-0452.2013.03.012Liu Fanjun, Li Dengyou. Distance formula of sphere and application[J]. Research of Mathematic Teaching-Learning, 2013, 32(3): 39-40. doi: 10.3969/j.issn.1671-0452.2013.03.012 [18] Vincenty T. Direct and inverse solutions of geodesics on the ellipsoid with application of nested equations[J]. Survey Review, 1975, 23(176): 88-93. [19] Suykens J A K, Vandewalle J. Least squares support vectors machine classifiers[J]. Neural Processing Letters, 1999, 9(3): 293-300. doi: 10.1023/A:1018628609742 [20] 谢政, 李建平. 非线性最优化理论与方法[M]. 北京: 高等教育出版社, 2010. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 931
- HTML全文浏览量: 257
- PDF下载量: 95
- 被引次数: 0