

Treatment Method for Multi-AUV Cooperative Positioning Underwater Acoustic Propagation Delay Based on IMM Algorithm
-
摘要: 针对主从式自主水下航行器(AUV)协同定位系统存在的水声探测与通信的延迟问题, 提出一种基于交互式多模型(IMM)算法的时间延迟处理方法。首先建立多AUV系统的协同定位计算模型, 针对系统非线性运动方程与非线性量测, 分析扩展卡尔曼滤波(EKF)协同定位结果因水声信号传播延迟产生的定位误差; 其次阐述常规延迟扩展卡尔曼滤波(DEKF)在处理时间延迟环节中无法实现对机动性目标AUV运动状态的精准跟踪问题; 最终设计IMM-DEKF算法, 选择适当的运动模型作为子滤波器, 利用新息更新模型概率, 精确跟踪主AUV运动状态, 降低从AUV滤波器中对主AUV状态值的估计误差, 实现整体协同系统定位精度的提高。仿真结果验证了所提算法在常规EKF的基础上有效提高了从AUV滤波器对主AUV航迹预测精度, 使得协同定位系统的整体定位精度得到提升。Abstract: To address the delay problem of underwater acoustic detection and communication in a master-slave autonomous undersea vehicle(AUV) cooperative positioning system, a time-delay processing method based on an interacting multiple model(IMM) algorithm is proposed. First, a cooperative positioning calculation model for a multi-AUV system is established. Aiming at the nonlinear motion equation and nonlinear measurement of the system, the positioning error caused by the propagation delay of underwater acoustic signal in the cooperative positioning result of extended Kalman filter(EKF) is analyzed. Second, the problem that delay EKF(DEKF) cannot accurately track the motion state of the maneuverable target AUV in handling time delay is described. Finally, the IMM-DEKF algorithm is designed, the appropriate motion models are selected as the sub filters, the model probability is updated via innovation, the motion states of the main AUVs are accurately tracked, the estimation errors of the state value of the main AUVs from the slaver AUV’s filter are reduced, and the positioning accuracy of the overall cooperative system is improved. The simulation results verify that the proposed algorithm effectively improves the prediction accuracy of the main track of the AUVs from the slave AUV filter based on the conventional EKF and improves the overall positioning accuracy of the cooperative positioning system.
-

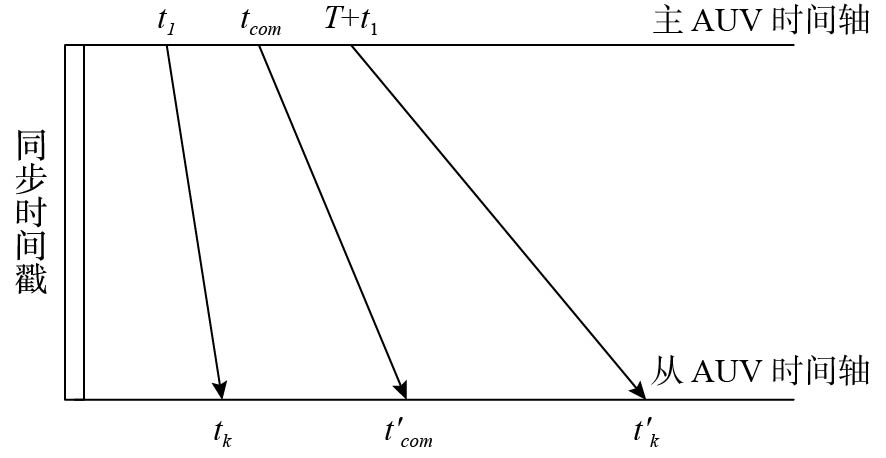
图 1 主从式AUV协同定位方式示意图
Figure 1. Diagram of master-slave AUV cooperative positioning method

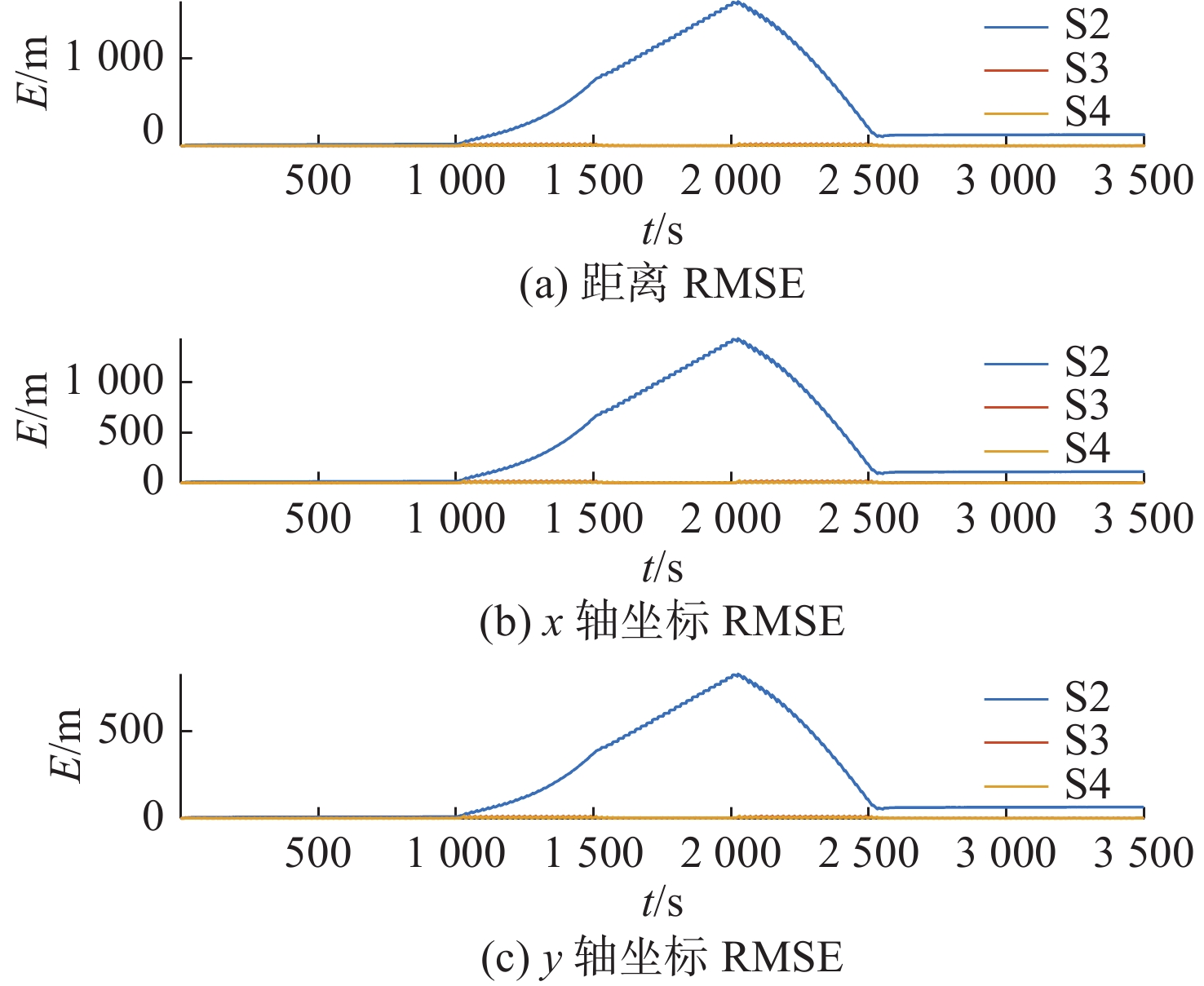
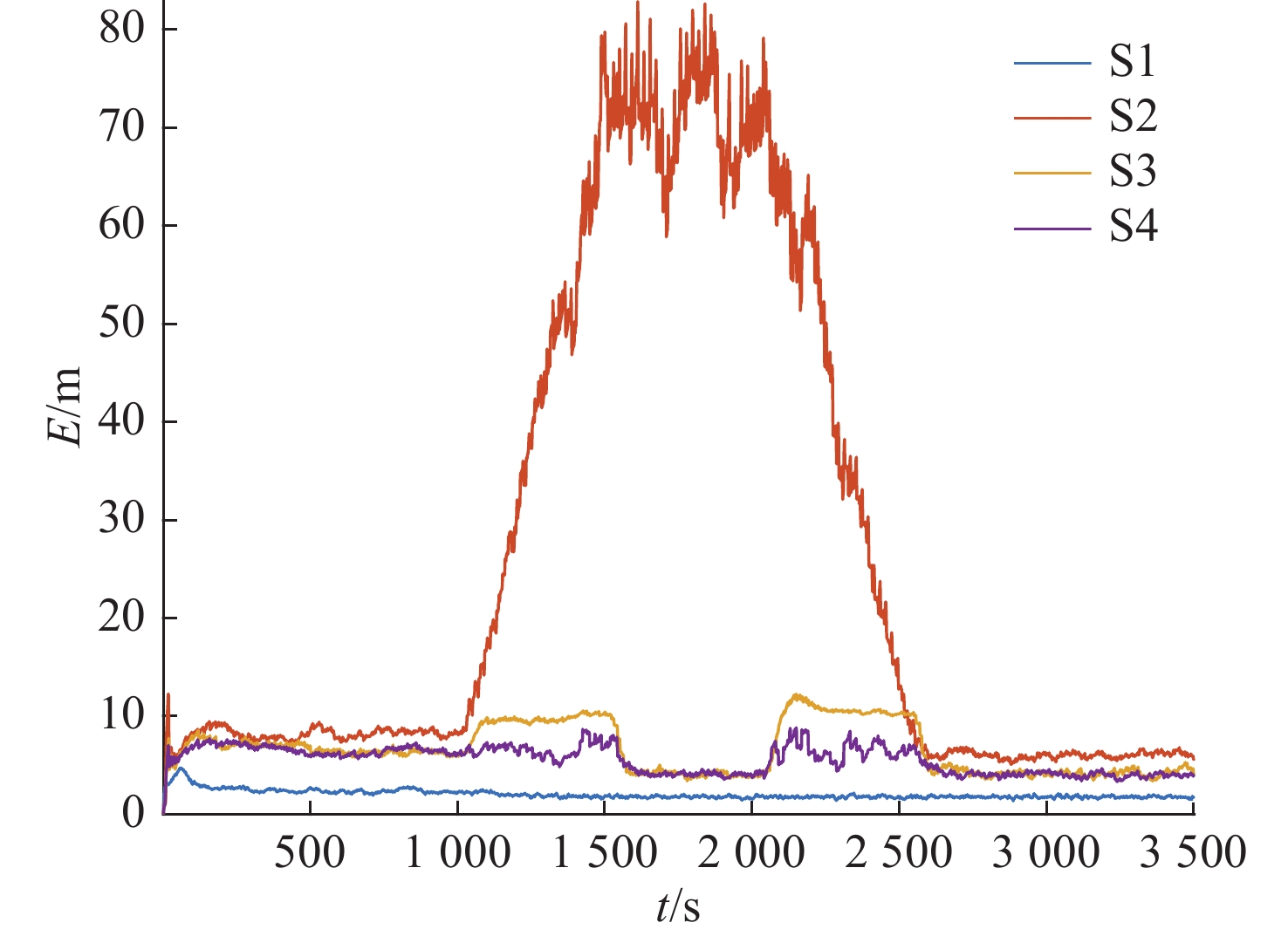
图 7 多场景下从AUV定位距离RMSE曲线
Figure 7. RMSE curves of slaver AUV positioning distance in multi-scene

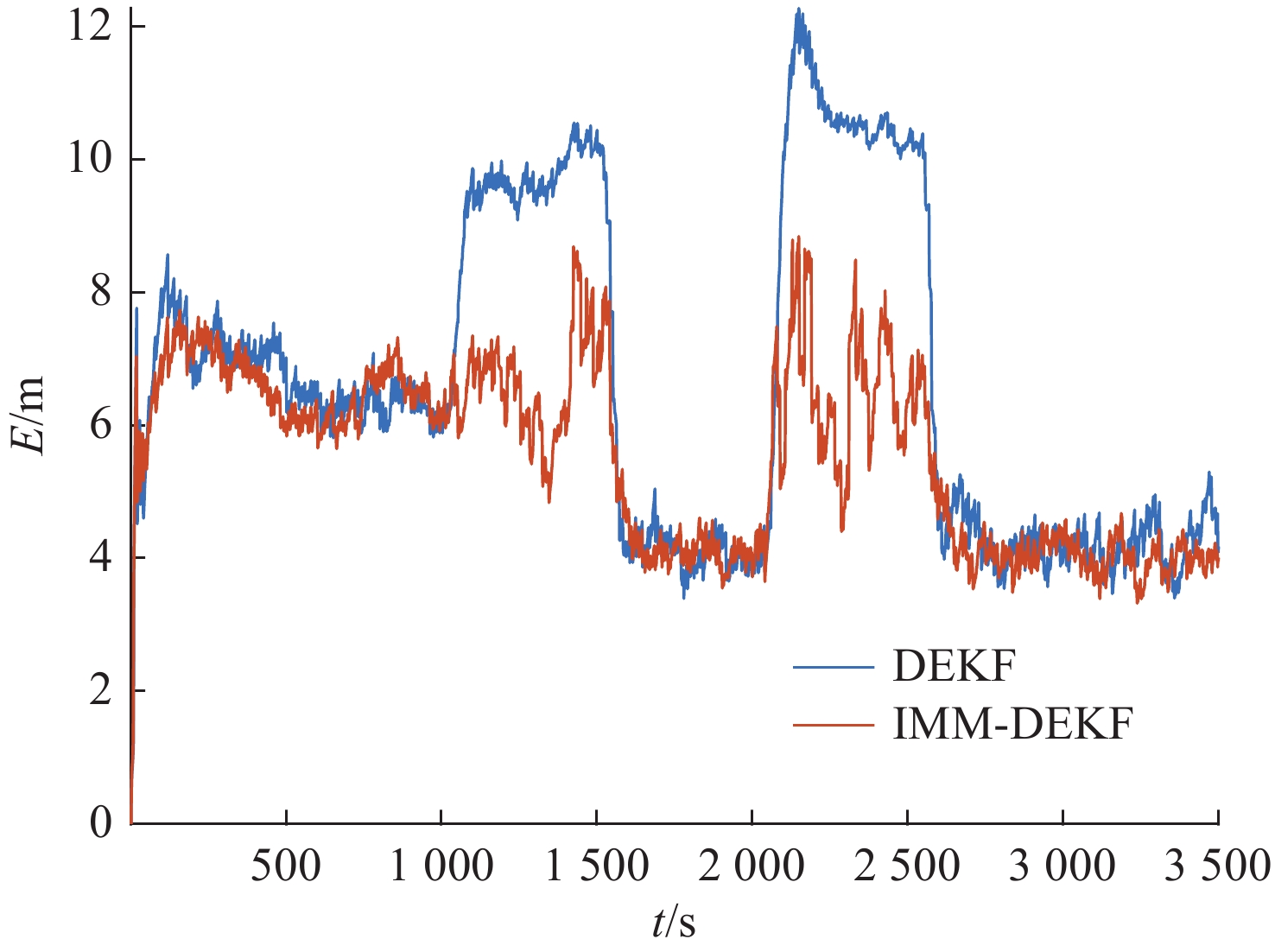
图 8 DEKF与IMM-DEKF算法下的从AUV距离RMSE曲线对比
Figure 8. Comparison of RMSE curves from slaver AUV between DEKF and IMM-DEKF algorithms

图 9 IMM-DEKF算法下AUV模型概率更新过程
Figure 9. Model probability update processes of AUV in IMM-DEKF algorithm

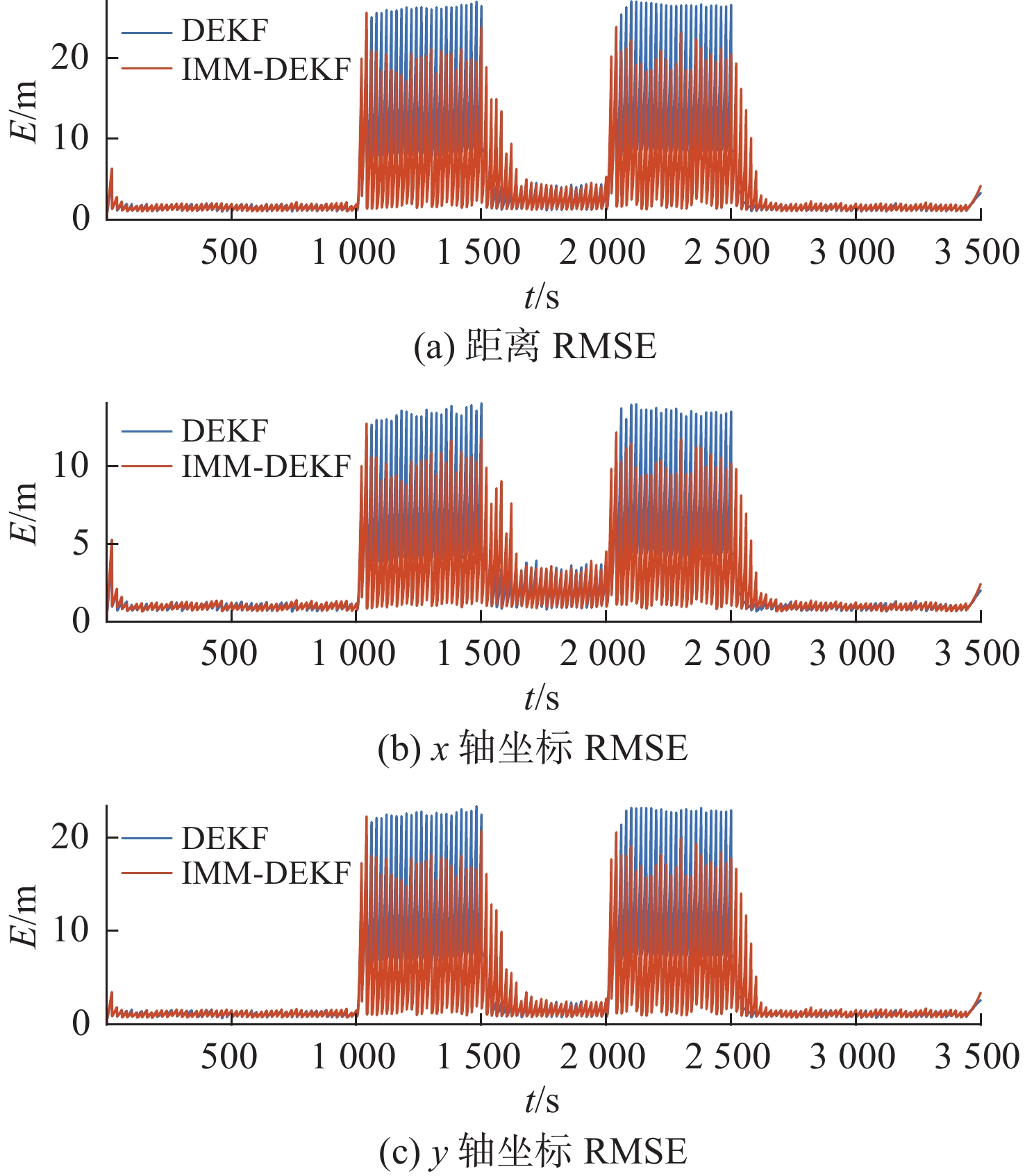
图 10 DEKF与IMM-DEKF算法下主AUV1航迹预测距离RMSE曲线
Figure 10. RMSE curves of track prediction distance from master AUV1 under DEKF and IMM-DEKF algorithms

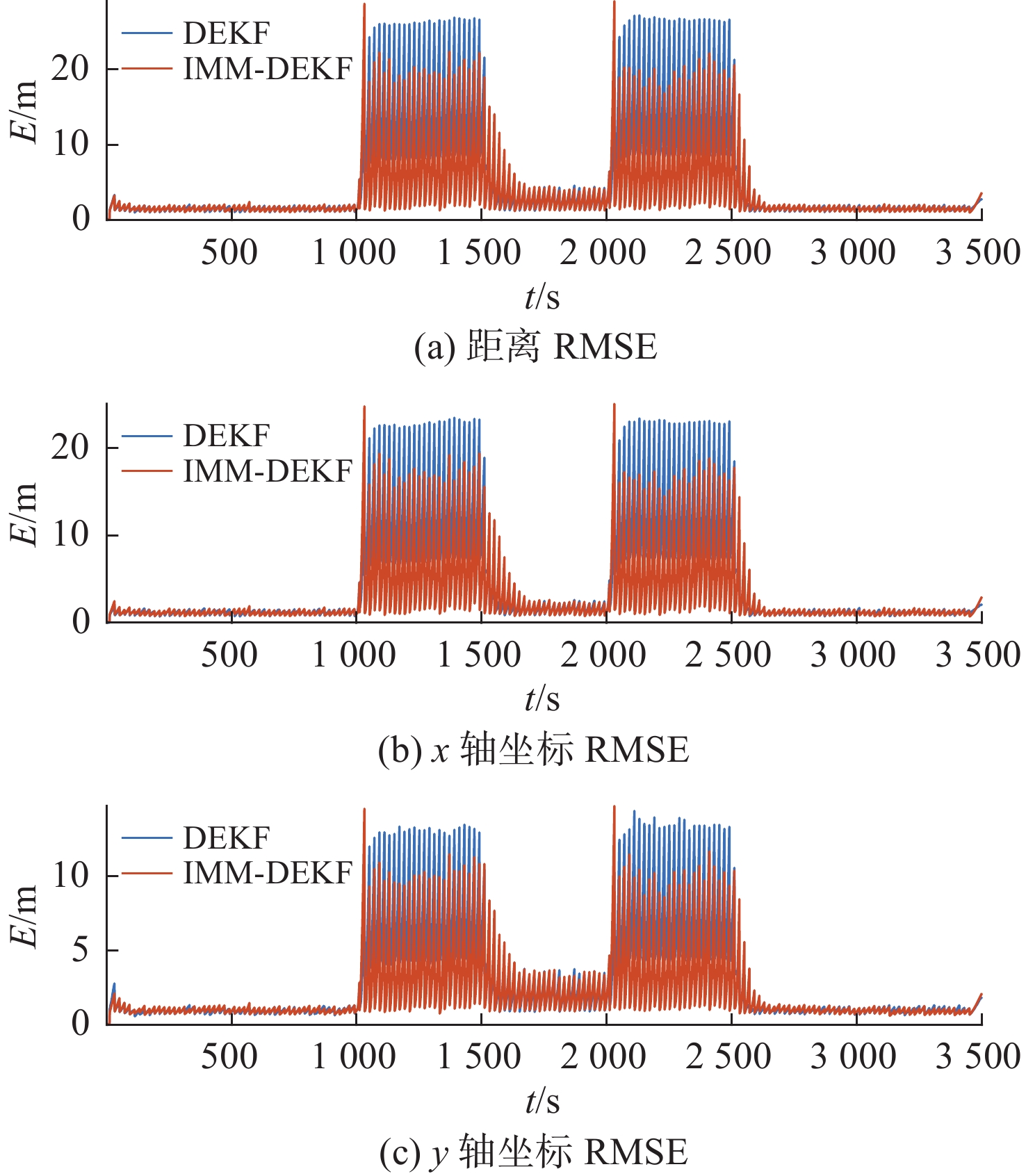
图 11 DEKF与IMM-DEKF算法下主AUV2航迹预测距离RMSE曲线
Figure 11. RMSE curves of track prediction distance of master AUV2 under DEKF and IMM-DEKF algorithms
表 1 [1 000 s, 1 500 s]时段滤波状态误差平均值
Table 1. Average values of state errors in [1 000 s, 1 500 s]
AUV [x, y, d]/m IMM-DEKF DEKF 主AUV1 [4.27, 6.83, 8.06] [7.06, 11.90, 13.85] 主AUV2 [6.83, 4.20, 8.04] [11.89, 6.90, 13.75] 从AUV [5.95, 2.71, 6.58] [5.36, 7.50, 9.36]  下载: 导出CSV
下载: 导出CSV
表 2 [1 500 s, 2 000 s]时段滤波状态误差平均值
Table 2. Average values of state errors in [1 500 s, 2 000 s]
AUV [x, y, d]/m IMM-DEKF DEKF 主AUV1 [2.46, 2.28, 3.39] [2.16, 1.88, 2.90] 主AUV2 [2.20, 2.32, 3.23] [2.08, 2.21, 3.08] 从AUV [3.52, 2.82, 4.52] [3.51, 3.14, 4.75]
下载: 导出CSV
表 3 [2 000 s, 2 500 s]时段滤波状态误差平均值
Table 3. Average values of state errors in [2 000 s, 2 500 s]
AUV [x, y, d]/m IMM-DEKF DEKF 主AUV1 [4.32, 7.05, 8.27] [7.26, 12.23, 14.23] 主AUV2 [6.62, 4.22, 7.86] [12.09, 7.20, 14.07] 从AUV [4.98, 3.78, 6.30] [6.39, 7.26, 9.69]
下载: 导出CSV
表 4 IMM-DEKF算法下各AUV距离误差下降百分比
Table 4. Percentage decrease in distance error of each AUV
AUV 距离误差/% [1 000 s, 1 500 s] [2 000 s, 2 500 s] 主AUV1 41.81 41.88 主AUV2 41.53 44.14 从AUV 29.70 34.98
下载: 导出CSV
-
[1] Kurazume R, Nagata S, Hirose S. Cooperative positioning with multiple robots[C]//1994 IEEE International conference on robotics & automation. San Diego, CA, USA: IEEE, 1994. [2] Sahu B K, Subudhi B. Flocking control of multiple AUVs based on fuzzy potential functions[J]. IEEE Transactions on Fuzzy Systems, 2018, 26(5): 2539-2551. doi: 10.1109/TFUZZ.2017.2786261 [3] Li X, Zhu D Q. An adaptive SOM neural network method for distributed formation control of a group of AUVs[J]. IEEE Transactions on Industrial Electronics, 2018, 65(10): 8260-8270. [4] Li X, Zhu D Q, Chen. Y Y, et al. Formation tracking and transformation control of nonholonomic AUVs based on improved SOM method[C]//2017 29th Chinese Control and Decision Conference(CCDC). Chongqing, China: IEEE, 2017. [5] Yuan C, Licht S, He H. Formation learning control of multiple autonomous underwater vehicles with heterogeneous nonlinear uncertain dynamics[J]. IEEE Transactions on Cybernetics, 2018, 48(10): 2920-2934. doi: 10.1109/TCYB.2017.2752458 [6] Hamilton M, Kemna S, Hughes D. Antisubmarine warfare applications for autonomous underwater vehicles: the GLINT09 sea trial results[J]. Journal of Field Robotics. 2010, 27(6): 890-902. [7] 尤晓艳, 武岩波, 朱敏. 基于虚拟移动长基线的载人潜水器声学定位算法[J]. 仪器仪表学报, 2019, 40(11): 146-154. [8] Bahr A. Cooperative localization for autonomous underwater vehicles[D]. Cambridge, MA, USA: Massachusetts Institute of Technology, 2009. [9] 王亭亭, 张南南, 岳才谦, 等. 基于水声通信的AUV组网与协同导航[J]. 水下无人系统学报, 2021, 29(4): 400-406. [10] 张立川, 徐德民, 刘明雍. 基于双水听器的多自主水下航行器协同导航方法[J]. 系统工程与电子技术, 2011, 33(7): 1603-1606. doi: 10.3969/j.issn.1001-506X.2011.07.32 [11] 赵晨. 基于水声通信网络的分布式定位关键问题研究[D]. 哈尔滨: 哈尔滨工程大学, 2021. [12] 张立川, 刘明雍, 徐德民, 等. 基于水声传播延迟的主从式多无人水下航行器协同导航定位研究[J]. 兵工学报, 2009, 30(12): 1674-1678. doi: 10.3321/j.issn:1000-1093.2009.12.020 [13] 高伟, 杨建, 刘菊, 等. 基于水声通信延迟的多UUV协同定位算法[J]. 系统工程与电子技术, 2014, 36(3): 539-545.Gao Wei, Yang Jian, Liu Ju, et al. Cooperative location of multiple UUVs based on hydro-acoustic communication delay[J]. Systems Engineering and Electronics, 2014, 36(3): 539-545. [14] 姚尧, 徐德民, 张立川, 等. 通信延迟下的多UUV协同定位—基于航迹预测的实时更新算法[J]. 机器人, 2011, 33(2): 161-168. doi: 10.3724/SP.J.1218.2011.00161Yao Yao, Xu Demin, Zhang Lichuan, et al. Cooperative localization of multiple UUVs with communication delays—a real-time update method based on path prediction[J]. Robot, 2011, 33(2): 161-168. doi: 10.3724/SP.J.1218.2011.00161 [15] Yunita M, Suryana J, Izzuddin A. Error performance analysis of IMM-Kalman filter for maneuvering target tracking application[C]//2020 6th International Conference on Wireless and Telematics(ICWT). Dubai, United Arab Emirates: IEEE, 2020. [16] Yao Y, Xu X, Li Y, et al. A hybrid IMM based INS/DVL integration solution for underwater vehicles[J]. IEEE Transactions on Vehicular Technology, 2019, 68(6): 5459-5470. doi: 10.1109/TVT.2019.2910397 [17] Fallon M F, Papadopoulos G, Leonard J J, et al. Cooperative AUV navigation using a single maneuvering surface craft[J]. The International Journal of Robotics Research, 2010, 29(12): 1461-1474. doi: 10.1177/0278364910380760 [18] 高伟, 刘亚龙, 徐博, 等. 基于双主交替领航的多AUV协同导航方法[J]. 哈尔滨工程大学学报, 2014, 35(6): 735-740.Gao Wei, Liu Ya-long, Xu Bo, et al. Multiple-AUV cooperative navigation based on two-leader alternated navigation[J]. Journal of Harbin Engineering University, 2014, 35(6): 735-740. [19] 卢健, 陈旭, 刘通, 等. 利用FastSLAM框架的多自治水下航行器同时定位与跟踪算法[J]. 控制理论与应用, 2020, 37(1): 89-97. doi: 10.7641/CTA.2019.80747Lu Jian, Chen Xu, Liu Tong, et al. Simultaneous localization and tracking algorithm utilizing FastSLAM framework for autonomous underwater vehicles[J]. Control Theory & Applications, 2020, 37(1): 89-97. doi: 10.7641/CTA.2019.80747 [20] 马朋, 张福斌, 徐德民. 基于距离量测的双领航多AUV协同定位队形优化分析[J]. 控制与决策, 2018, 33(2): 256-262.Ma Peng, Zhang Fubin, Xu Demin. Optimality analysis for formation of MAUV cooperative localization with two leaders based on range measurements[J]. Control and Decision, 2018, 33(2): 256-262. [21] Eustice R M, Whitcomb L L, Singh H, et al. Recent advances in Synchronous-Clock One-Way-Travel-Time acoustic navigation[C]//IEEE Oceans 2006. Boston, MA, USA: IEEE, 2006. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 994
- HTML全文浏览量: 236
- PDF下载量: 125
- 被引次数: 0





