Applications of EKF and UKF Algorithms in Bearings-only Target Tracking with a Double Observation Stations
-
摘要: 为了对水下运动目标进行实时跟踪, 以静止双观测站纯方位跟踪系统为研究对象, 分别结合扩展卡尔曼滤波(EKF)算法和无迹卡尔曼滤波(UKF)算法的原理, 对基于EKF和UKF算法的双观测站纯方位跟踪系统进行了仿真分析及比较。结果表明, 基于2种算法的双观测站纯方位系统都能适用于水下运动目标实时跟踪, 但后者具有更快的收敛速度和更好的鲁棒性。同时, 分别分析了双站距离和方位角量测误差对实时跟踪效果的影响, 仿真结果表明, 2个观测站距离过近或过远都会降低目标跟踪的效果, 基于EKF和UKF算法的双观测站系统在两站距离800 m时都能得到较满意的跟踪效果; 随着方位角量测误差的增大, 基于2种算法的双观测站系统的跟踪性能都会下降, 但UKF算法在EKF算法跟踪失效时仍然具有较好的跟踪性能。Abstract: For tracking underwater moving targets in real time, a bearings-only tracking system with a stationary double observation station was investigated. By combining the extended Kalman filter(EKF) algorithm and the unscented Kalman filter(UKF) algorithm, the bearings-only tracking system based on the EKF and UKF algorithms was simulated and compared. The results demonstrated that the double observation station system based on the two algorithms can be applied to real-time tracking of underwater moving targets, but the latter shows faster convergence and better robustness. The influence of the distance between the two stations and bearings measurement error on the real-time tracking effect was also analyzed. Simulation results showed that the effect of target tracking is reduced if the distance between the two observation stations is too small or too large. The double observation stations system based on EKF and UKF algorithms can achieve satisfactory tracking results when the distance between the two stations is 800 m; with the increase in the bearing measurement error, the tracking performance of the double observation stations system based on the two algorithms decreases, but the UKF algorithm still exhibits better tracking performance when the EKF algorithm fails to track.
-

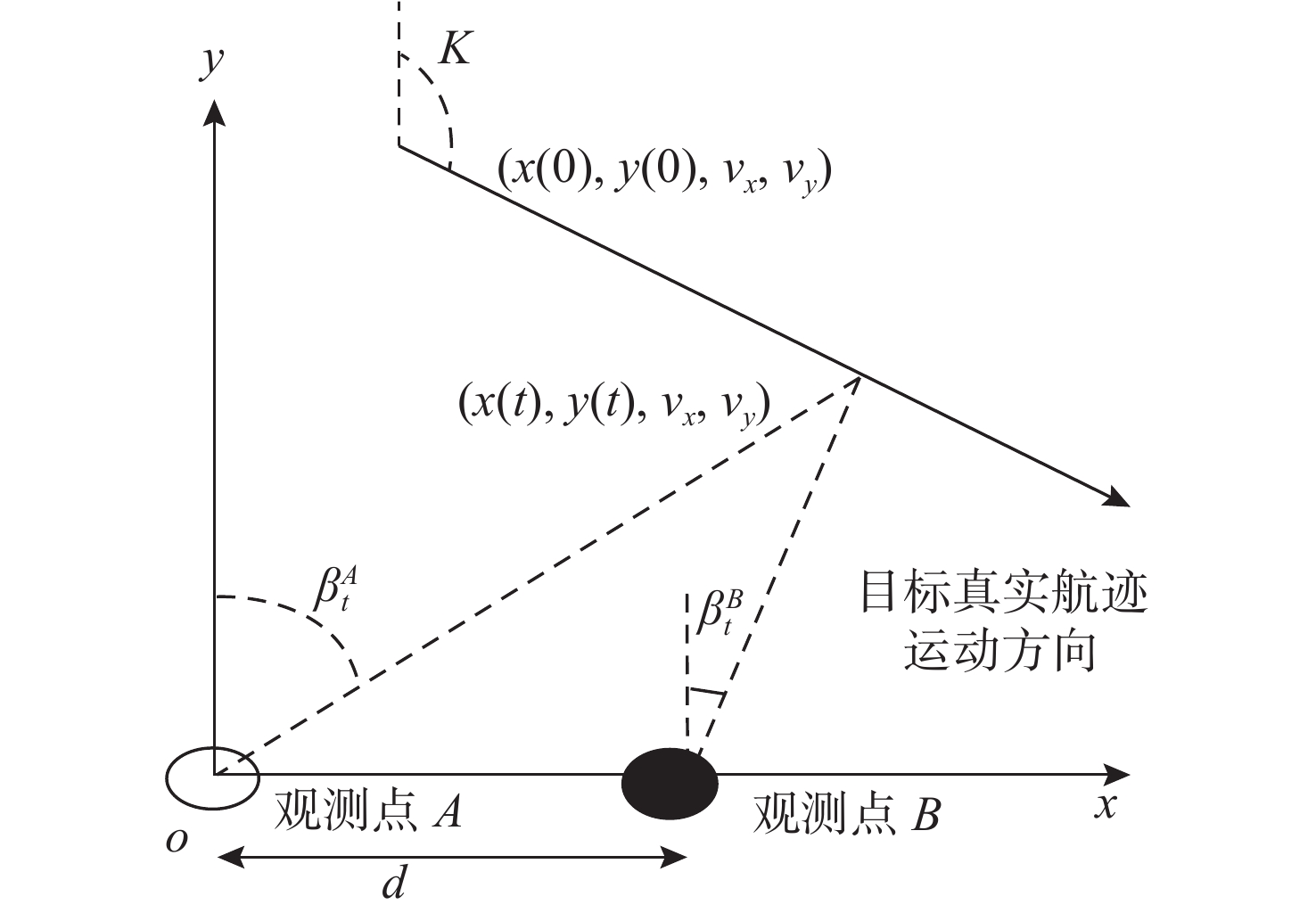
图 1 目标与观测站几何态势
Figure 1. Geometrical situation between target and observation stations

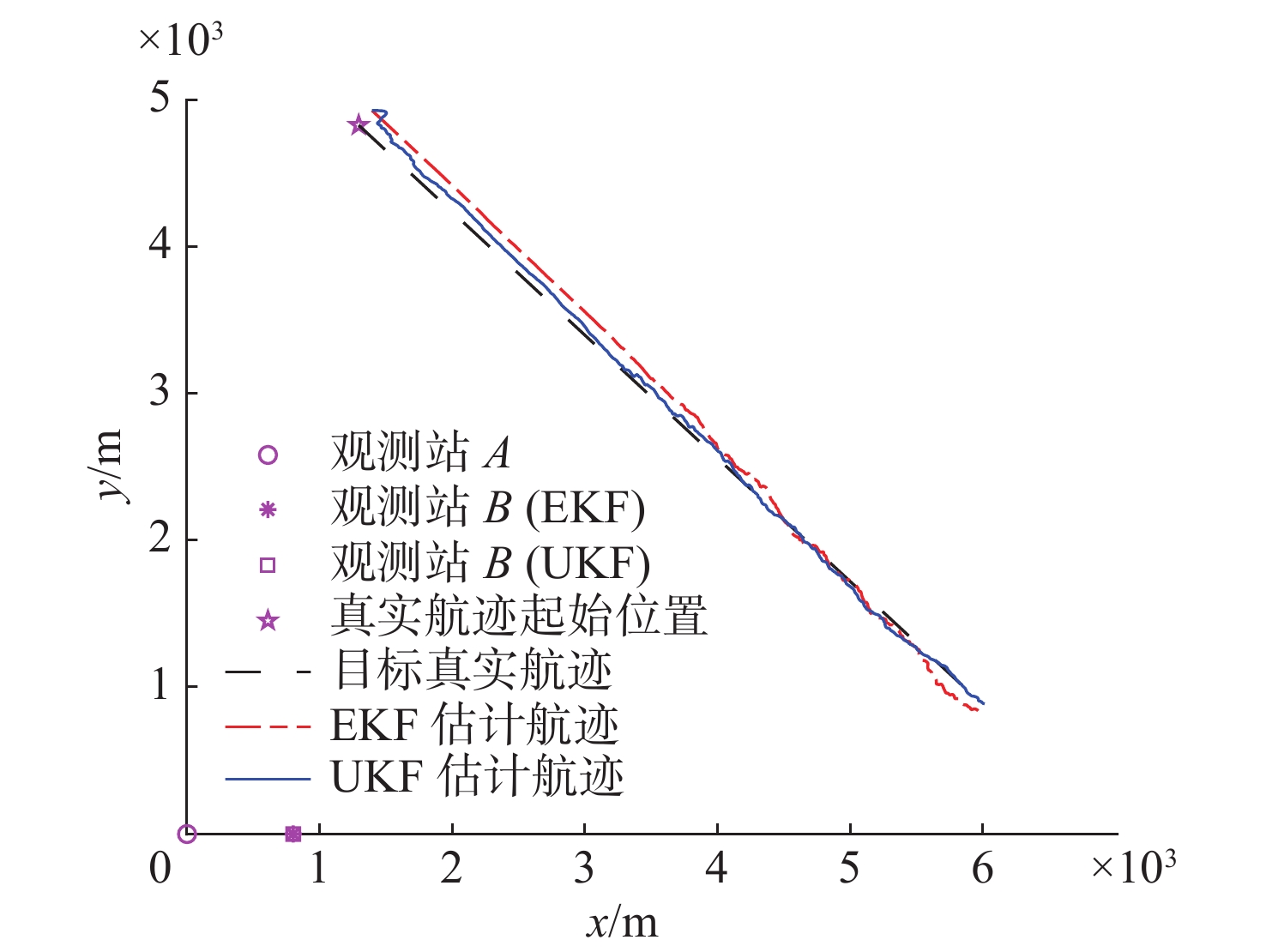
图 2 R = 1°时EKF和UKF目标跟踪航迹图
Figure 2. Target tracking trajectory of EKF and UKF with R = 1°
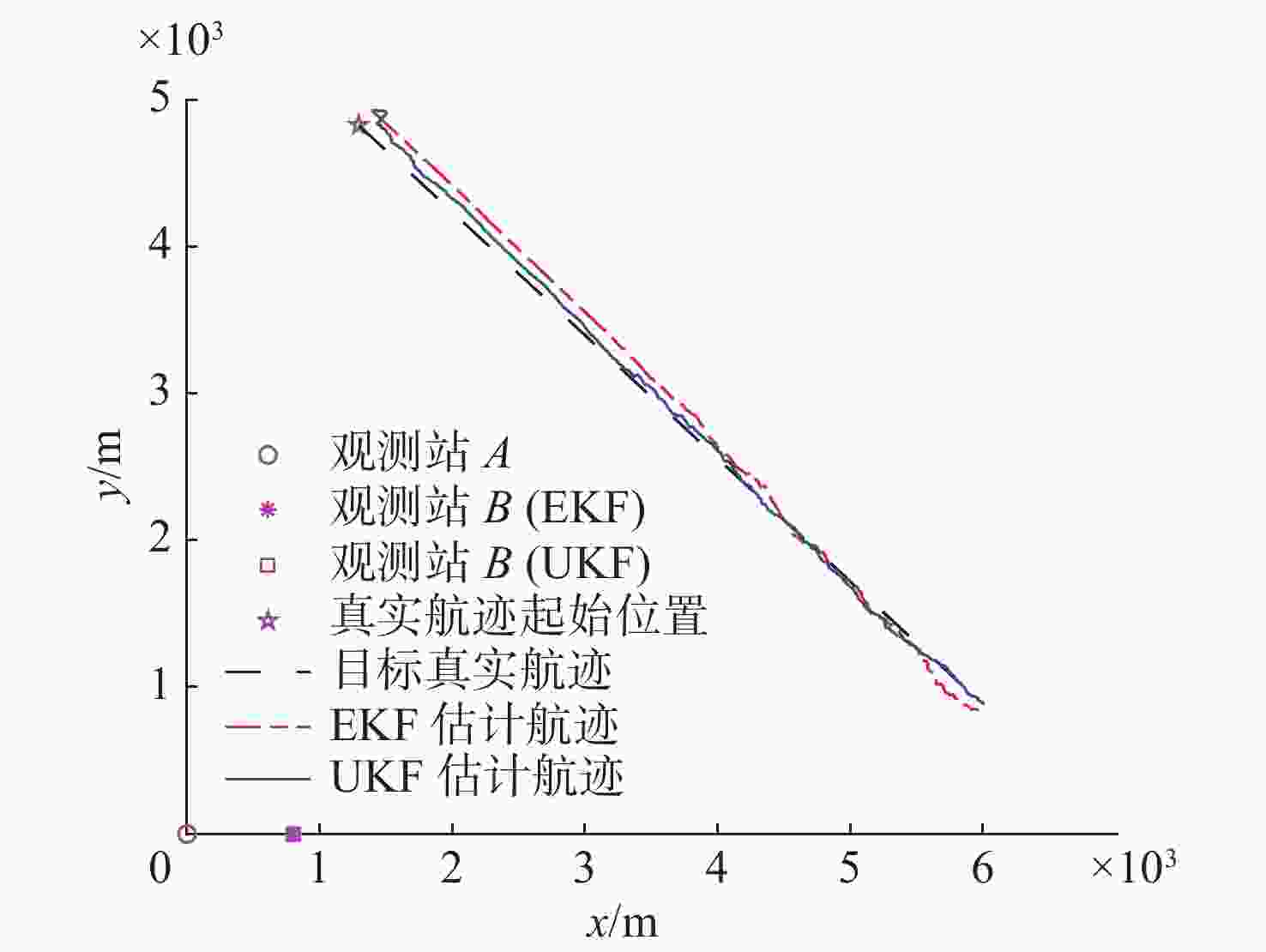
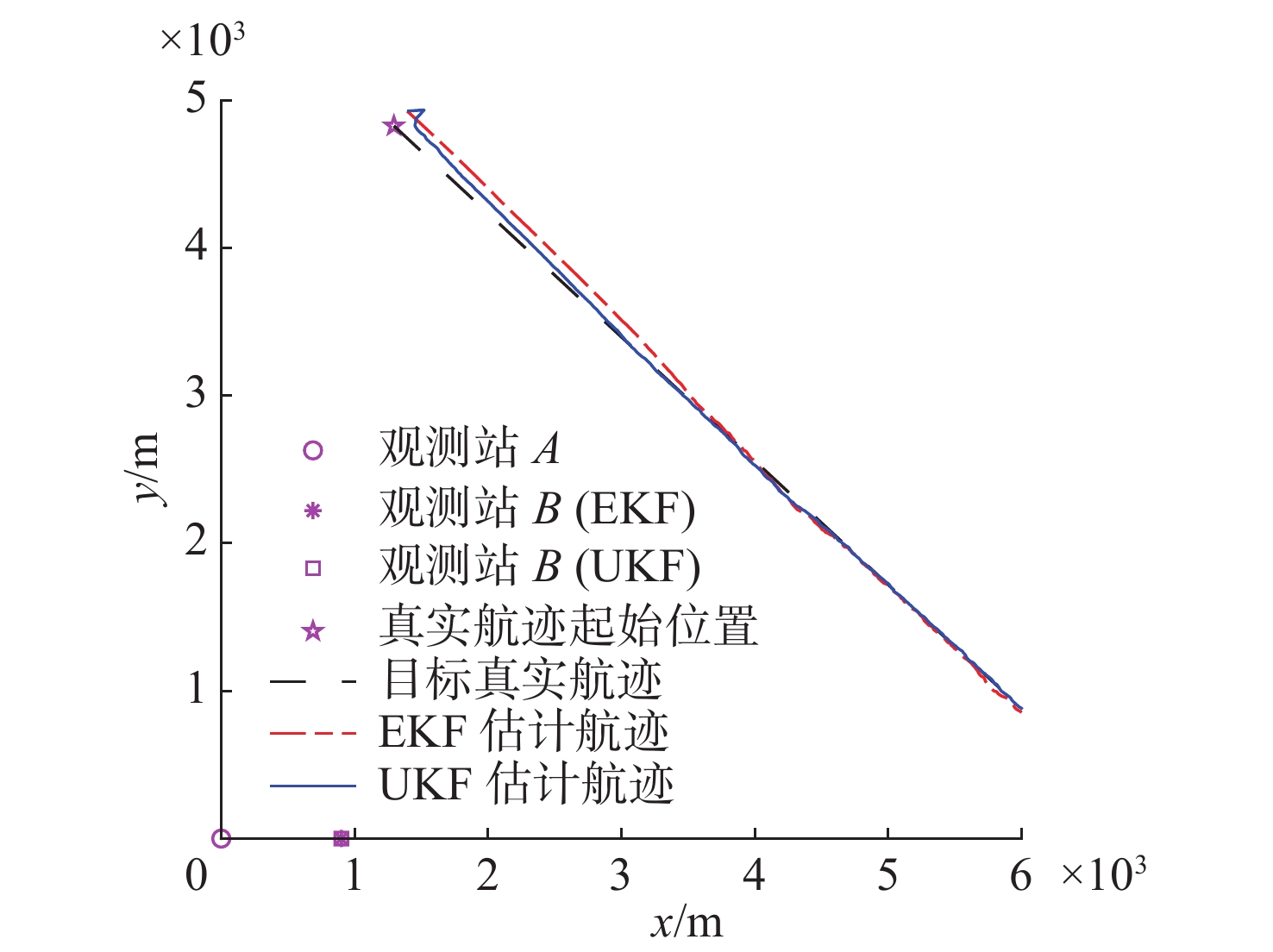
图 9 R = 4°时EKF和UKF目标跟踪航迹
Figure 9. Target tracking trajectory of EKF and UKF with R = 4°
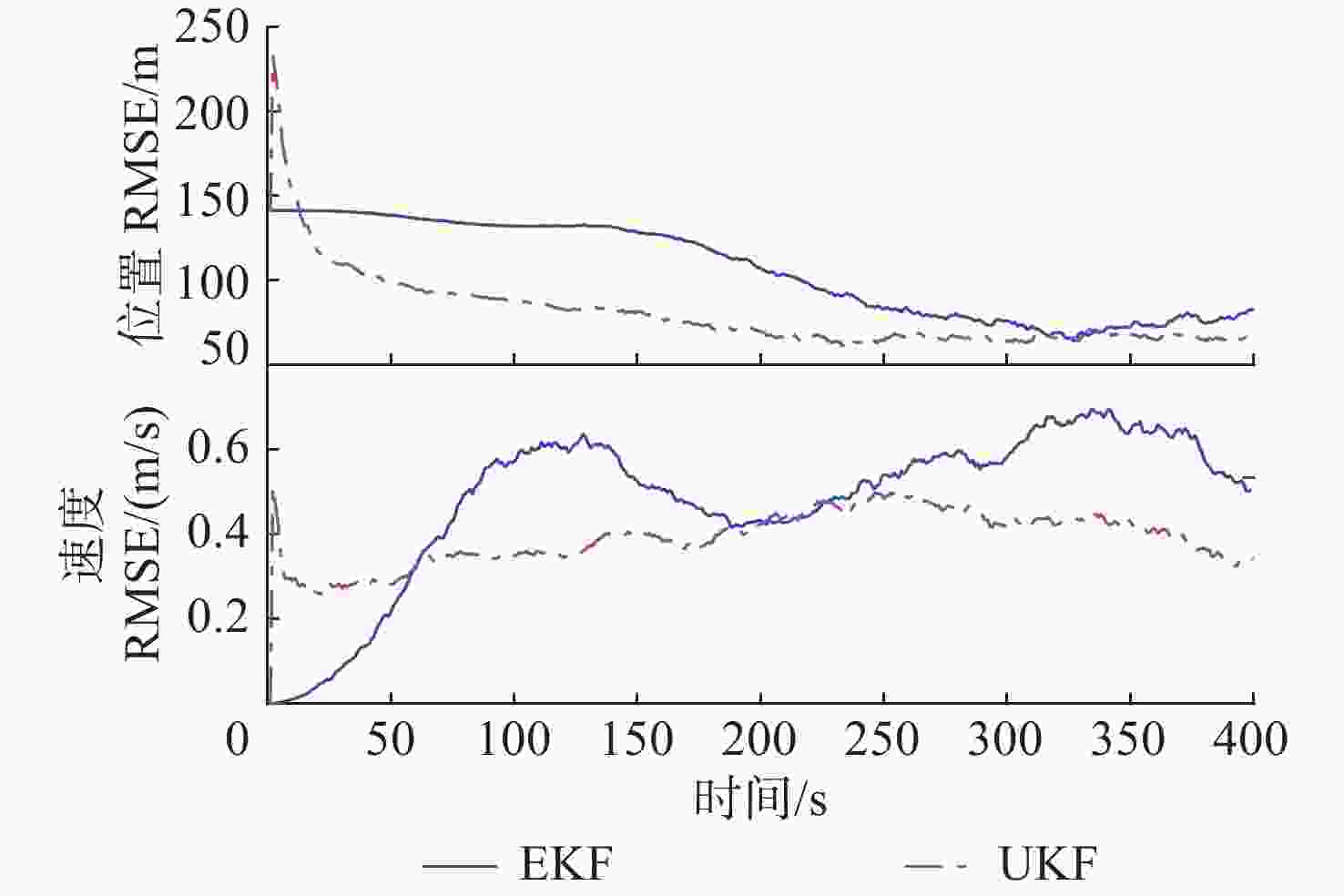
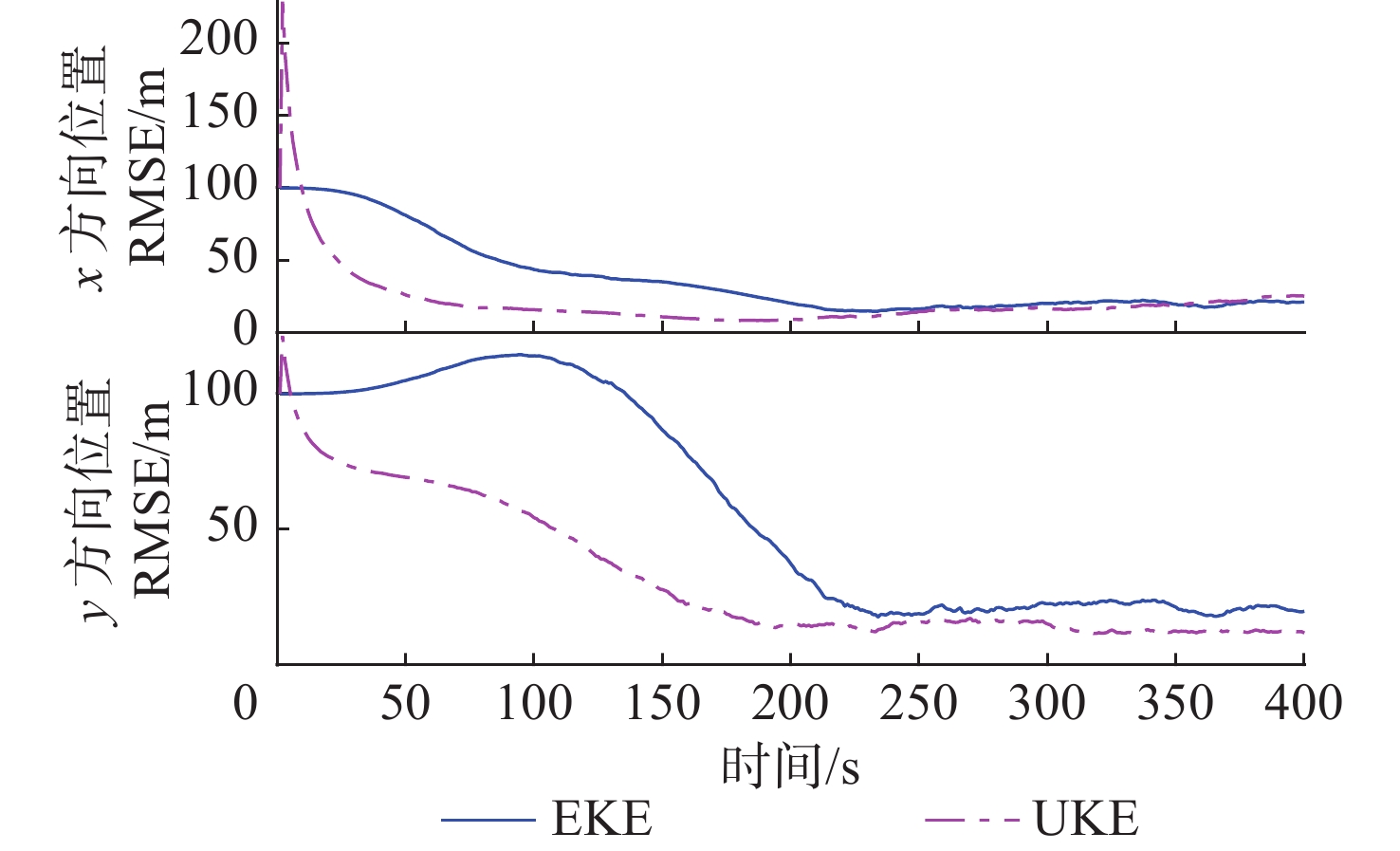
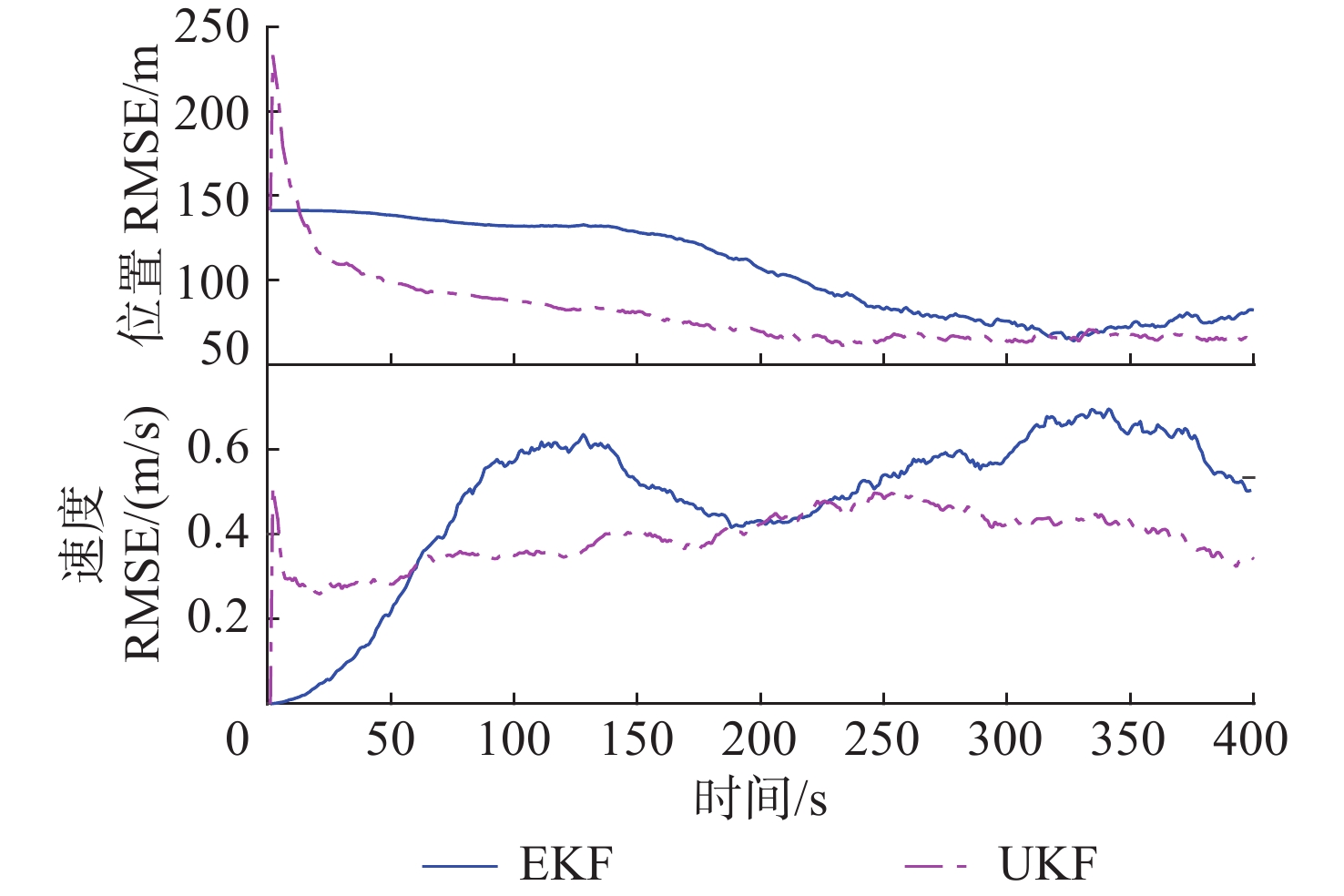
图 10 R = 4°时EKF和UKF位置和速度RMSE
Figure 10. Position and velocity RMSE of EKF and UKF with R = 4°
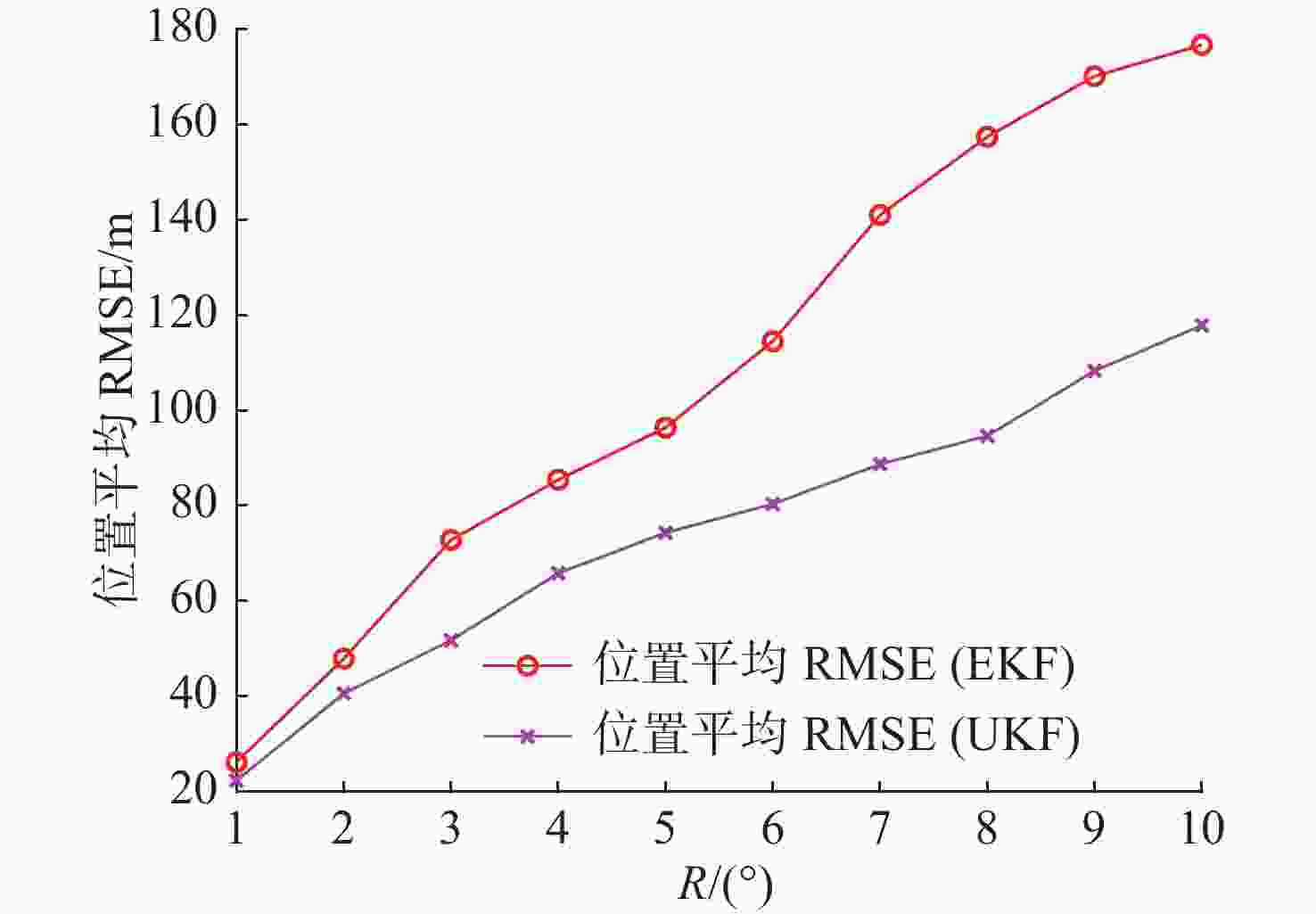
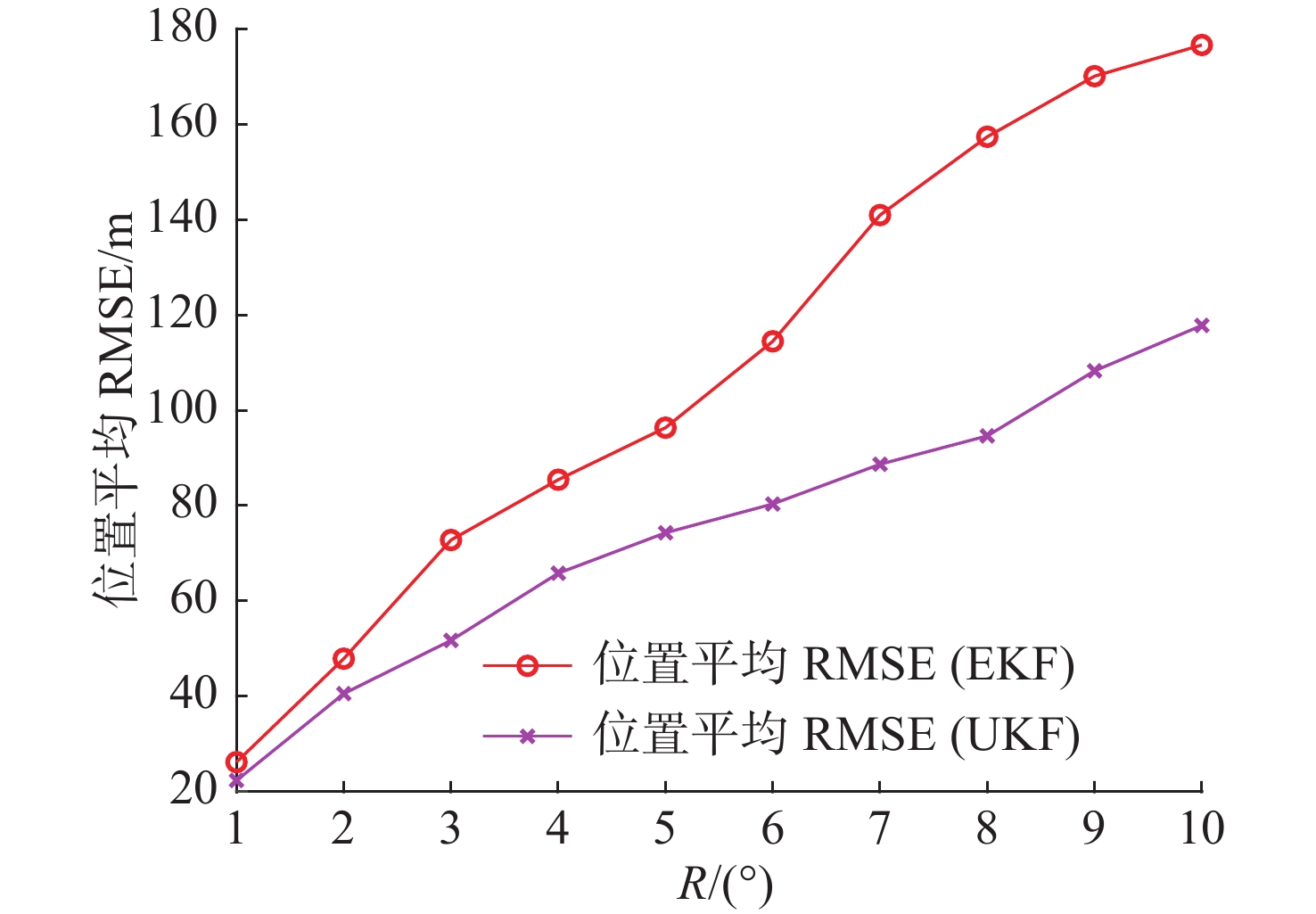
图 11 不同方位角量测误差时EKF和UKF位置平均RMSE
Figure 11. Position average RMSE in EKF and UKF with different bearing measurement errors
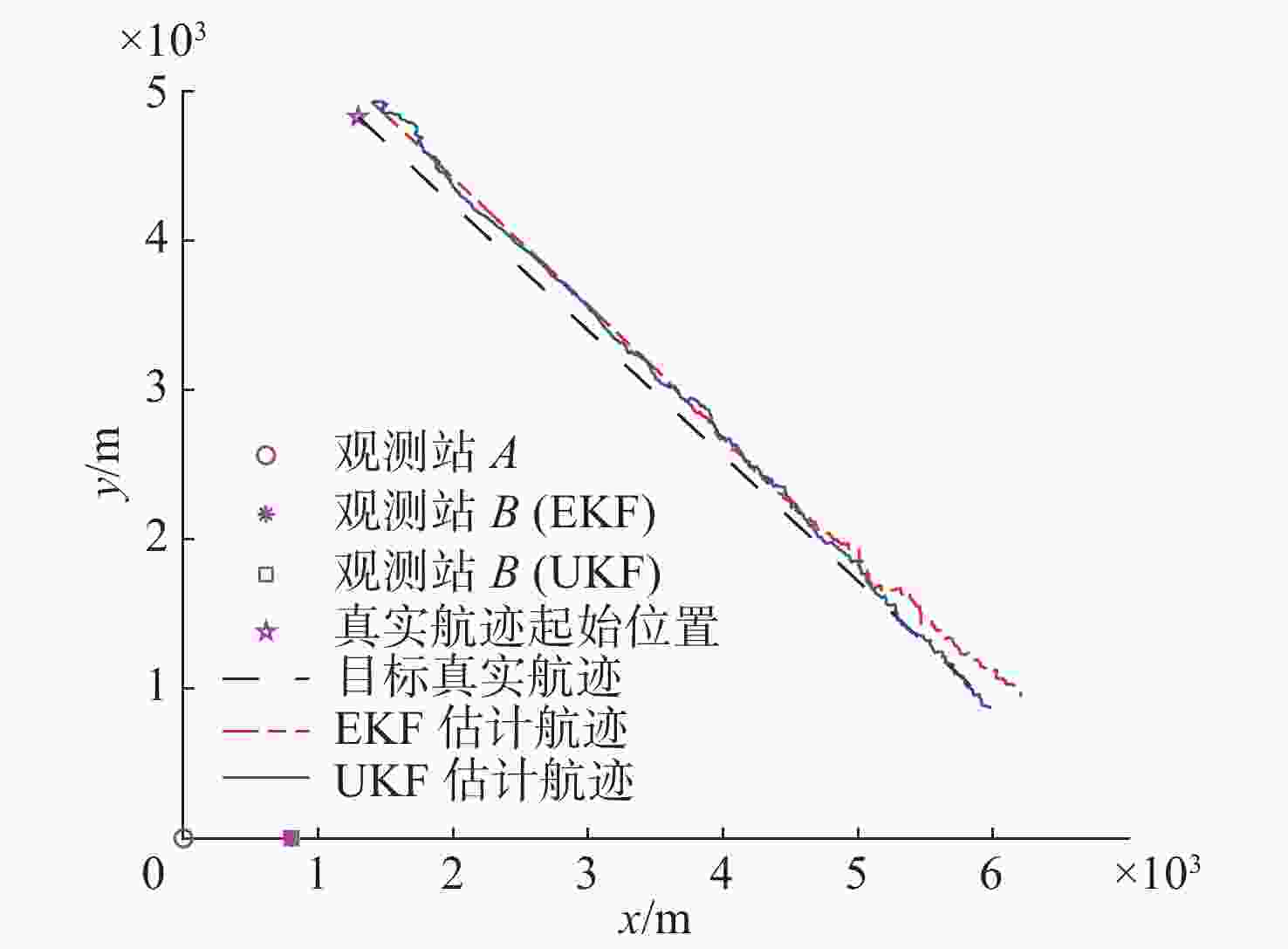
图 12 R = 8°时EKF和UKF目标跟踪航迹
Figure 12. Target tracking trajectory of EKF and UKF with R = 8°
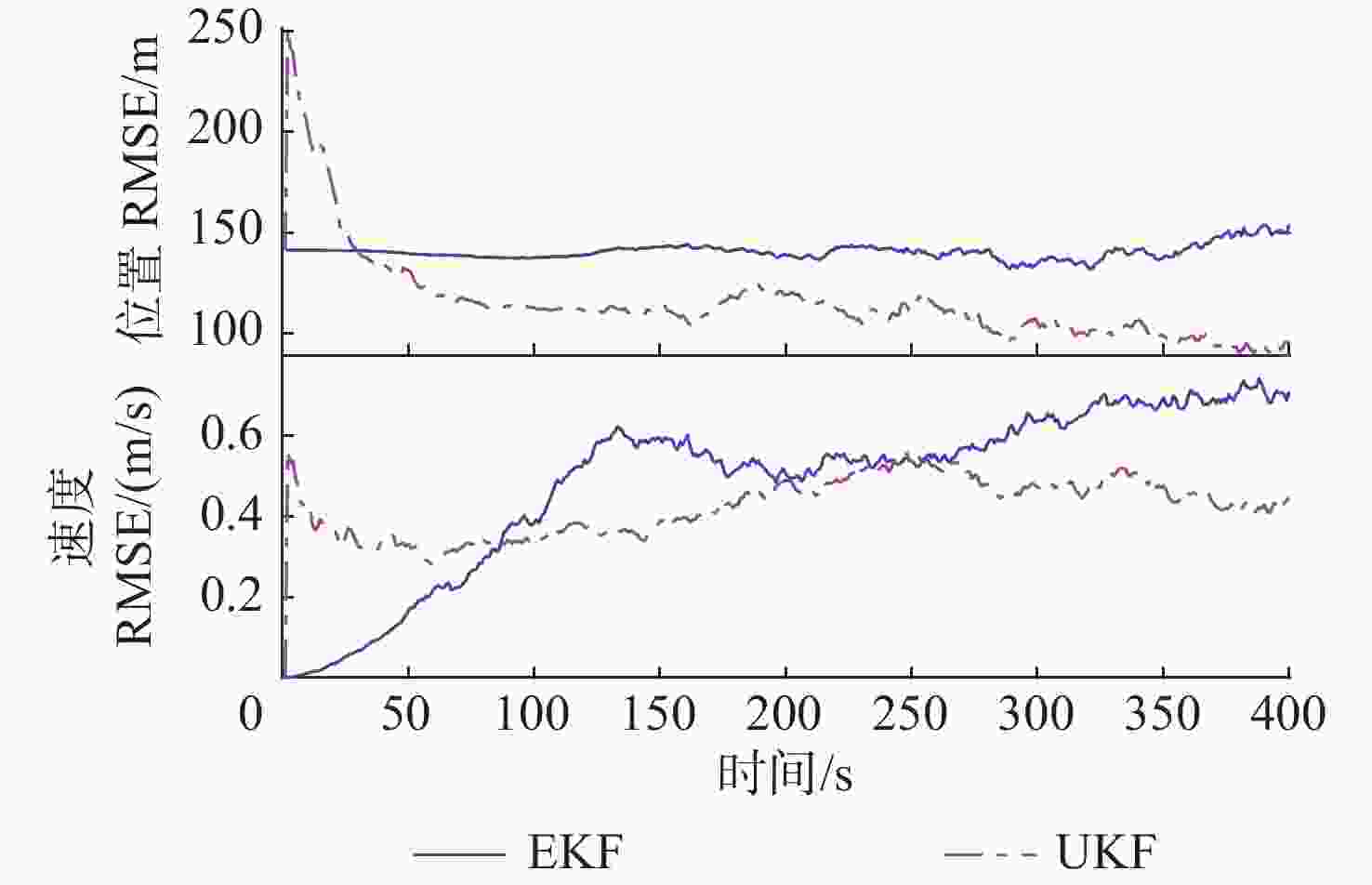
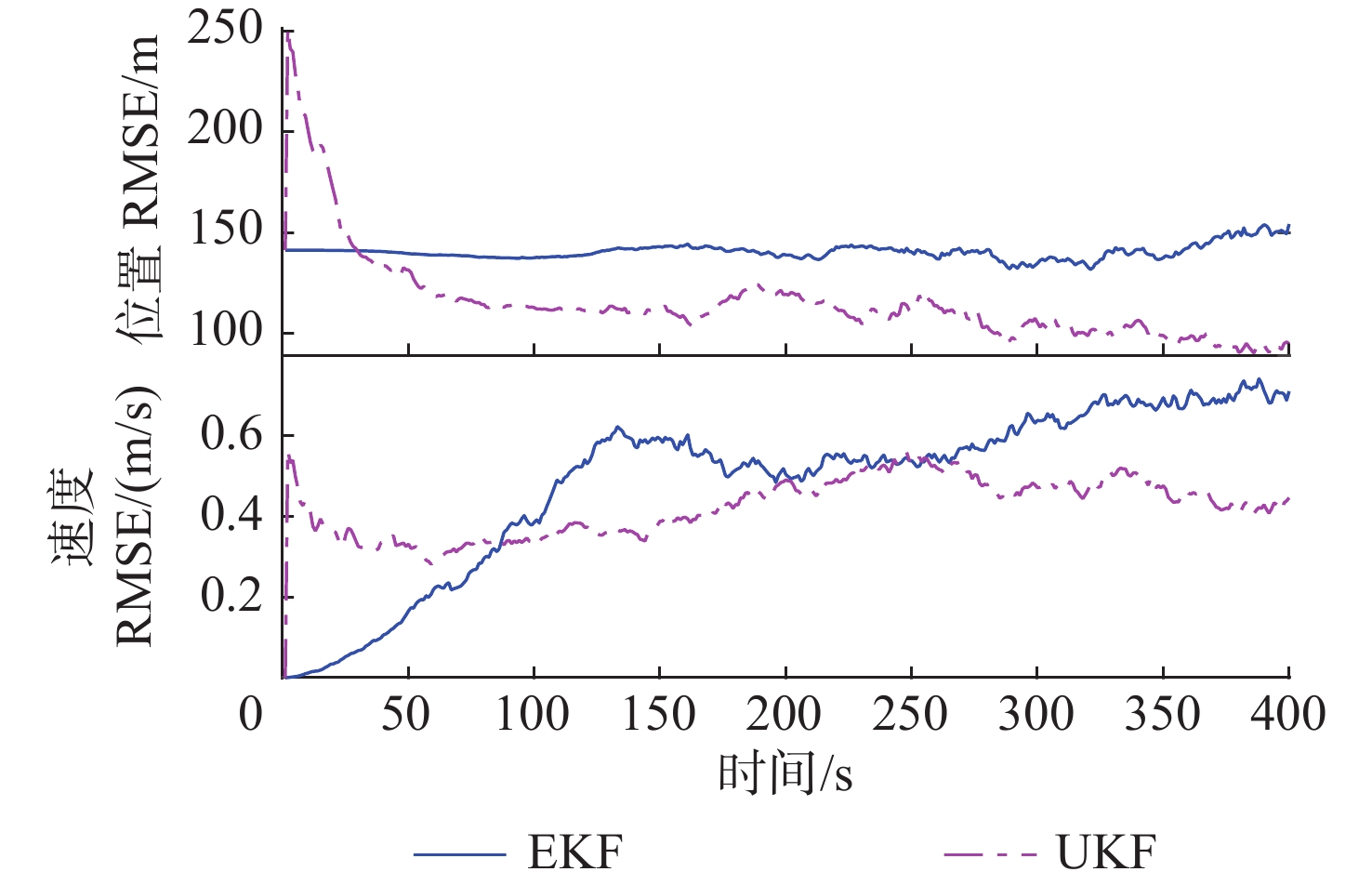
图 13 R = 8°时EKF和UKF位置和速度RMSE
Figure 13. Position and velocity of RMSE in EKF and UKF with R = 8°
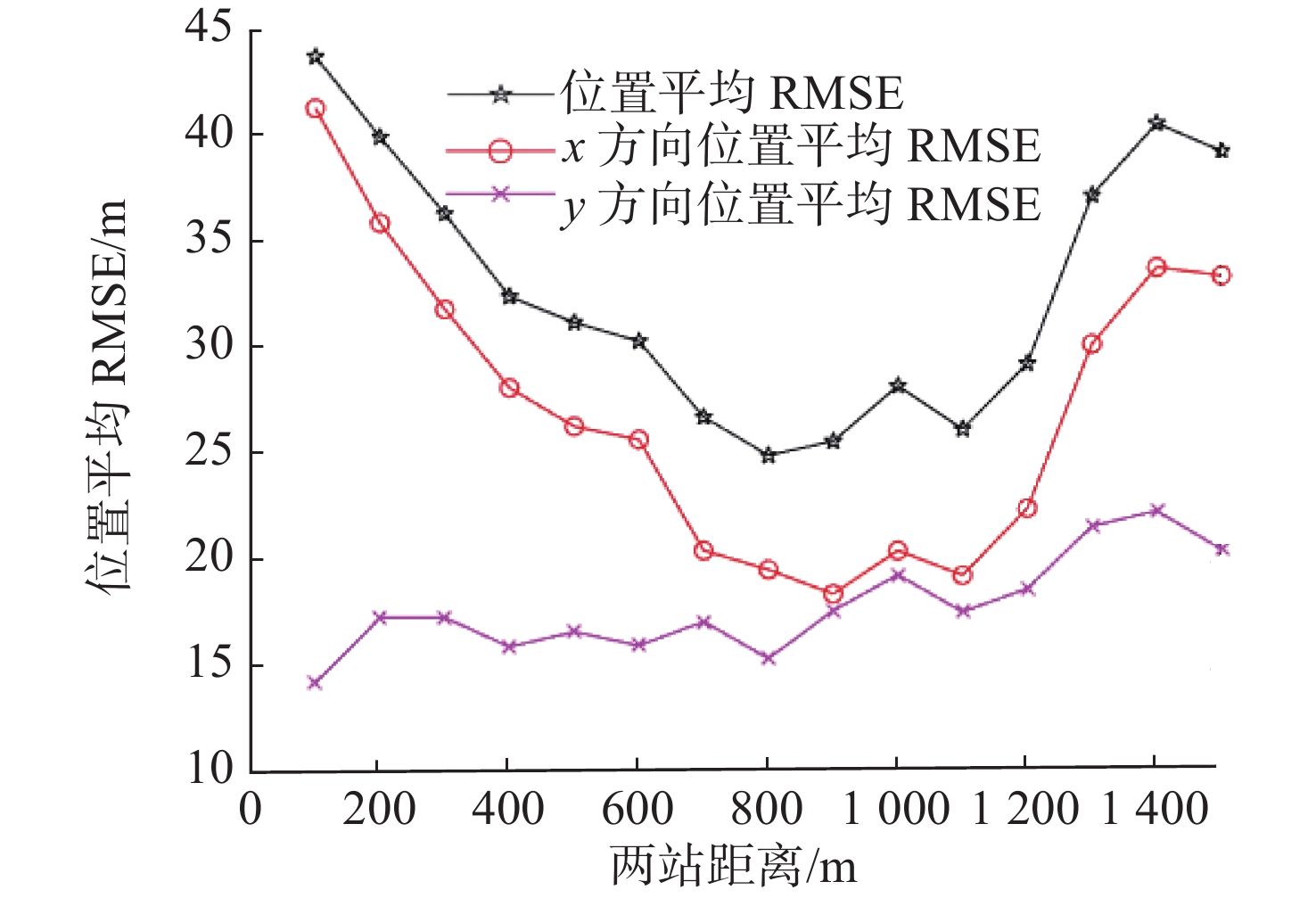
表 1 EKF位置RMSE平均值
Table 1. Average of position RMSE with EKF
两站距离
/mx方向位置平均RMSE/m y方向位置平均RMSE/m 位置平均
RMSE/m100 41.35 14.34 43.78 200 35.96 17.42 40.00 300 31.91 17.43 36.40 400 28.22 16.05 32.51 500 26.41 16.76 31.29 600 25.79 16.11 30.41 700 20.58 17.24 26.85 800 19.68 15.50 25.05 900 18.54 17.75 25.71 1 000 20.58 19.44 28.32 1 100 19.42 17.70 26.29 1 200 22.57 18.79 29.37 1 300 30.29 21.73 37.28 1 400 33.90 22.45 40.66 1 500 33.51 20.64 39.36  下载: 导出CSV
下载: 导出CSV
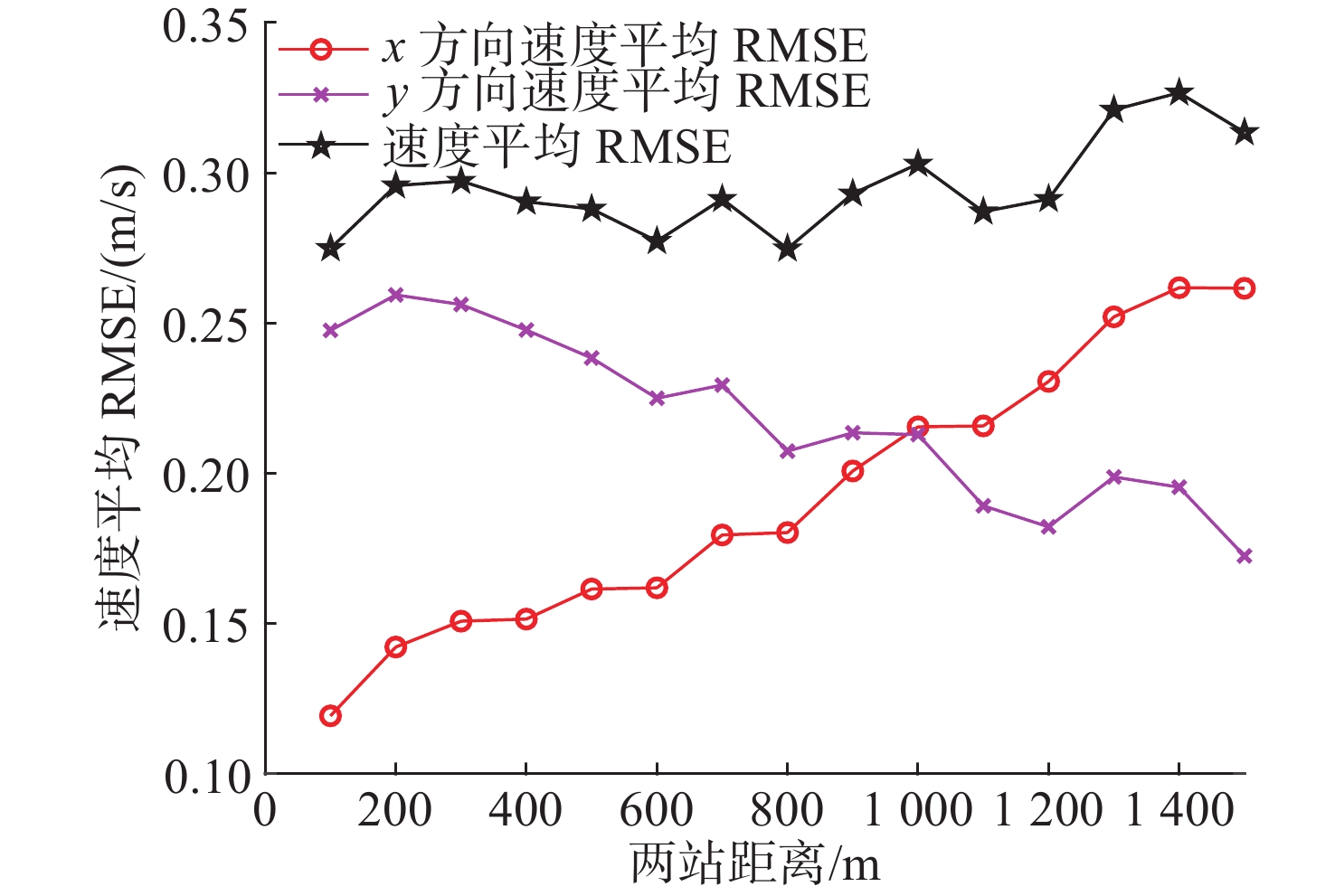
表 2 EKF速度RMSE平均值
Table 2. Average of velocity RMSE with EKF
两站距离/m x方向速度平均RMSE/(m/s) y方向速度平均RMSE/(m/s) 速度平均
RMSE/(m/s)100 0.119 3 0.247 6 0.274 9 200 0.142 2 0.259 4 0.295 8 300 0.150 8 0.256 2 0.297 3 400 0.151 5 0.247 7 0.290 4 500 0.161 5 0.238 4 0.288 0 600 0.161 9 0.225 0 0.277 3 700 0.179 5 0.229 4 0.291 3 800 0.180 3 0.207 4 0.274 8 900 0.200 8 0.213 5 0.293 1 1 000 0.215 5 0.212 9 0.303 0 1 100 0.215 8 0.189 2 0.287 1 1 200 0.230 6 0.182 2 0.291 3 1 300 0.252 1 0.198 8 0.321 0 1 400 0.261 8 0.195 4 0.326 7 1 500 0.261 6 0.172 5 0.313 5
下载: 导出CSV
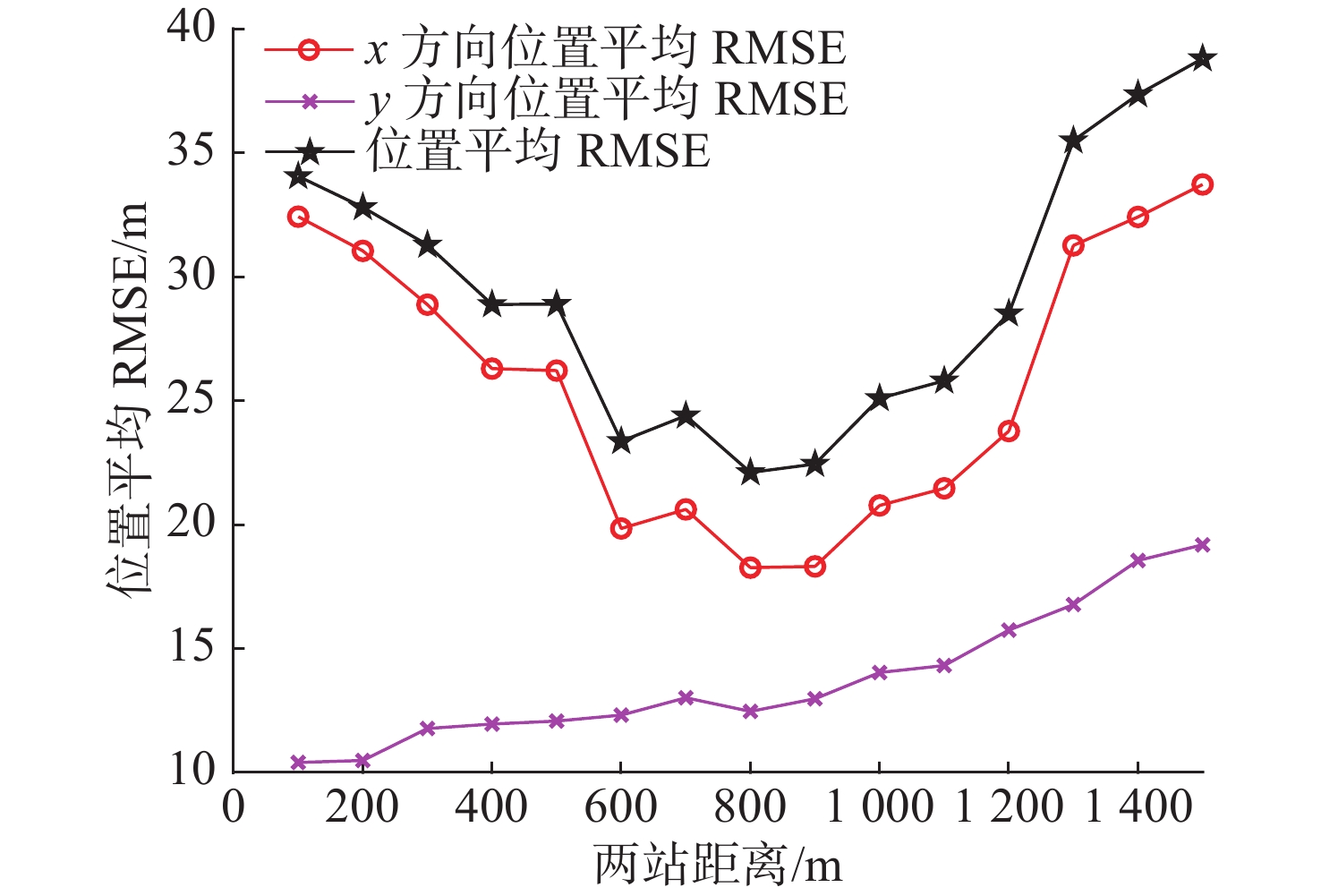
表 3 UKF位置RMSE平均值
Table 3. Average of the position RMSE with UKF
两站距离/m x方向位置平均RMSE/m y方向位置平均RMSE/m 位置平均RMSE/m 100 32.43 10.41 34.06 200 31.05 10.49 32.81 300 28.88 11.78 31.29 400 26.30 11.96 28.89 500 26.22 12.08 28.90 600 19.85 12.32 23.37 700 20.62 13.02 24.40 800 18.27 12.47 22.11 900 18.32 12.98 22.45 1000 20.78 14.04 25.10 1100 21.47 14.32 25.81 1200 23.78 15.75 28.52 1300 31.27 16.78 35.50 1400 32.42 18.56 37.36 1500 33.73 19.19 38.81
下载: 导出CSV
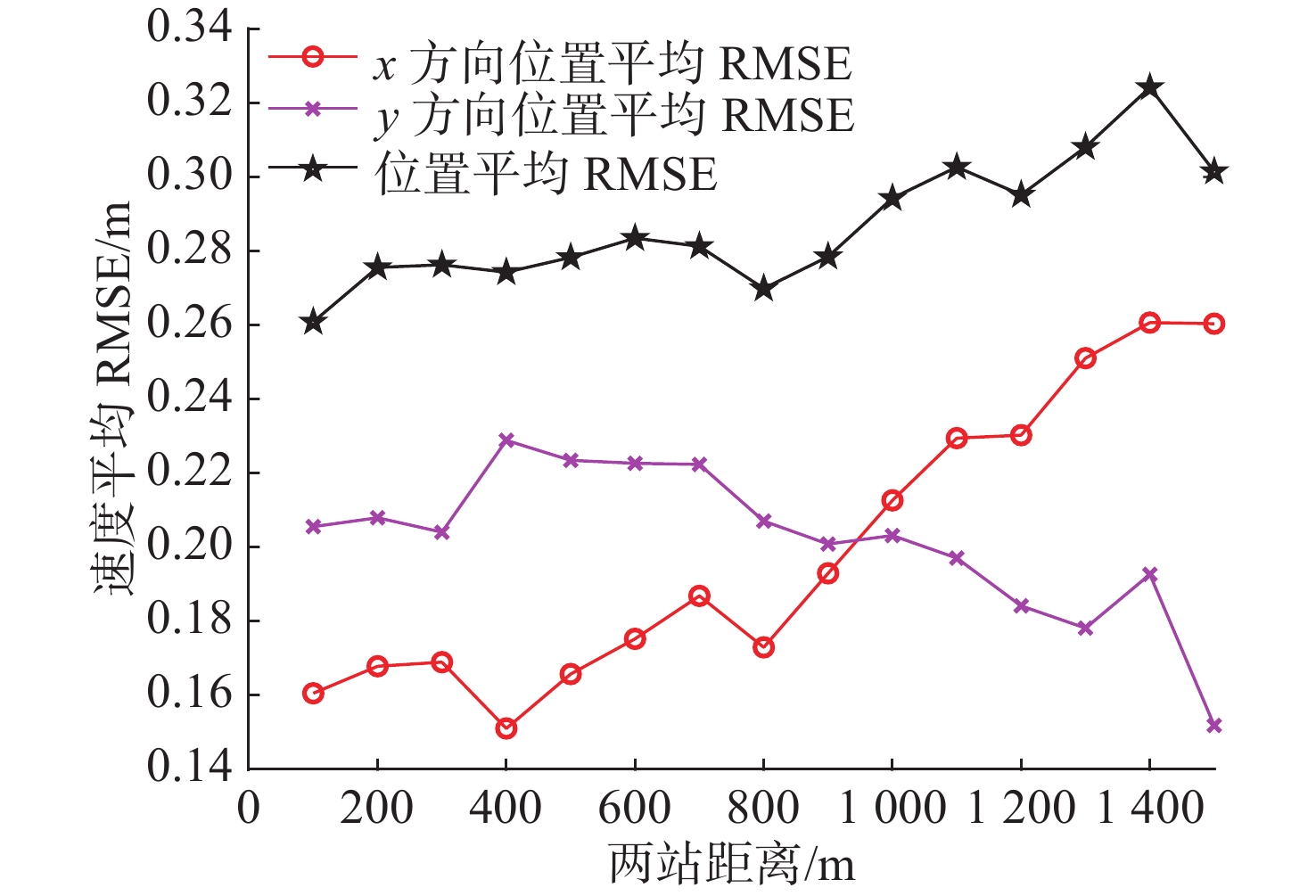
表 4 UKF速度RMSE平均值
Table 4. Average of velocity RMSE with UKF
两站距离/m x方向速度平均RMSE/(m/s) y方向速度平均RMSE/(m/s) 速度平均
RMSE/(m/s)100 0.160 6 0.205 6 0.260 9 200 0.167 9 0.208 0 0.275 6 300 0.169 0 0.204 1 0.276 3 400 0.151 1 0.228 9 0.274 3 500 0.165 8 0.223 5 0.278 3 600 0.175 3 0.222 7 0.283 5 700 0.186 9 0.222 4 0.281 3 800 0.173 0 0.207 1 0.269 9 900 0.193 0 0.200 9 0.278 5 1000 0.212 7 0.203 2 0.294 3 1100 0.229 5 0.197 1 0.302 7 1200 0.230 3 0.184 2 0.295 2 1300 0.251 1 0.178 2 0.308 1 1400 0.260 7 0.192 7 0.324 2 1500 0.260 4 0.151 9 0.301 5
下载: 导出CSV
表 5 不同方位角量测误差时EKF位置平均RMSE
Table 5. Average of position RMSE with different bearing measurement errors in EKF
R/(°) x方向位置平均RMSE/m y方向位置平均RMSE/m 位置平均
RMSE/m1 20.05 16.93 26.26 2 38.05 29.05 47.95 3 60.64 40.20 72.84 4 71.30 47.15 85.48 5 78.07 56.53 96.39 6 92.78 66.90 114.50 7 116.67 78.82 140.97 8 131.07 86.97 157.40 9 137.30 99.63 170.10 10 139.63 108.20 176.64
下载: 导出CSV
表 6 不同方位角量测误差时EKF速度平均RMSE
Table 6. Average of velocity RMSE with different bearing measurement errors in EKF
R/(°) x方向速度平均RMSE/(m/s) y方向速度平均RMSE/(m/s) 速度平均
RMSE/(m/s)1 0.187 0 0.219 6 0.287 5 2 0.200 7 0.309 0 0.368 2 3 0.211 1 0.348 5 0.408 0 4 0.212 4 0.3685 0.425 3 5 0.242 6 0.402 5 0.470 0 6 0.262 5 0.413 6 0.490 2 7 0.290 8 0.414 5 0.506 7 8 0.297 7 0.421 7 0.516 2 9 0.335 0 0.490 0 0.594 2 10 0.336 8 0.512 3 0.613 1
下载: 导出CSV
表 7 不同方位角量测误差时UKF位置平均RMSE
Table 7. Average of position RMSE with different bearing measurement errors in UKF
R/(°) x方向位置平均RMSE/m y方向位置平均RMSE/m 位置平均RMSE/m 1 18.48 12.67 22.41 2 35.35 19.97 40.62 3 42.80 29.55 51.78 4 55.65 35.24 65.87 5 61.44 41.87 74.35 6 65.60 46.47 80.39 7 68.42 56.48 88.72 8 73.69 59.42 94.67 9 87.07 64.40 108.30 10 93.47 71.74 117.83
下载: 导出CSV
表 8 不同方位角量测误差时UKF速度平均RMSE
Table 8. Average of velocity RMSE with different bearing measurement error in UKF
R/(°) x方向速度平均RMSE/(m/s) y方向速度平均RMSE/(m/s) 速度平均
RMSE/(m/s)1 0.172 5 0.203 3 0.266 6 2 0.180 5 0.226 6 0.289 7 3 0.216 8 0.236 7 0.321 0 4 0.200 8 0.226 5 0.302 7 5 0.204 7 0.240 2 0.315 6 6 0.196 7 0.261 2 0.327 2 7 0.205 5 0.269 9 0.339 6 8 0.231 9 0.268 5 0.354 6 9 0.258 3 0.304 2 0.402 2 10 0.263 1 0.329 1 0.421 7
下载: 导出CSV
-
[1] 金巧园, 张国超, 代中华. 基于改进遗传粒子滤波的纯方位机动目标跟踪[J]. 应用科技, 2021, 48(5): 29-34. doi: 10.11991/yykj.202012021 [2] 李晓花, 李亚安, 房媛媛, 等. EKF和PF算法及其在目标跟踪中的应用[J]. 声学技术, 2012, 31(3): 296-299. doi: 10.3969/j.issn.1000-3630.2012.03.012Li Xiaohua, Li Yaan, Fang Yuanyuan, et al. EKF and PF algorithms and their applications to target tracking[J]. Technical Acoustic, 2012, 31(3): 296-299. doi: 10.3969/j.issn.1000-3630.2012.03.012 [3] 宋绪栋, 蔚婧, 李晓花, 等. 基于纯方位角测量的水下目标被动跟踪技术[J]. 鱼雷技术, 2012, 20(5): 353-358.Song Xudong, Yu Jing, Li Xiaohua, et al. Passive underwater target tracking based on bearings-only measurement[J]. Torpedo Technology, 2012, 20(5): 353-358. [4] Jagan B O L, Rao S K, Jawahar A, et al. Unscented Kalman filter with application to bearings-only passive target tracking[J]. Indian Journal of Science and Technology, 2016, 9(19): 1-10. [5] Wang Y, Zhang H, Mao X. Switched and iterated square-root gauss-hermite filter for passive target tracking[J]. Circuits Syst Signal Process, 2018, 37: 5463-5485. doi: 10.1007/s00034-018-0823-7 [6] 蔚婧, 文珺, 李彩彩, 等. 辅助变量纯方位目标跟踪算法[J]. 西安电子科技大学学报, 2016, 43(1): 167-172.Yu Jing, Wen Jun, Li Caicai, et al. Modified instrumental variable method for bearings-only target tracking[J]. Journal of Xidian University, 2016, 43(1): 167-172. [7] 赵振轶, 李亚安, 陈晓, 等. 基于双观测站的水下机动目标被动跟踪[J]. 水下无人系统学报, 2018, 26(1): 40-45.Zhao Zhenyi, Li Yaan, Chen Xiao, et al. Passive tracking of underwater maneuvering target based on double observation station[J]. Journal of Unmanned Undersea Systems, 2018, 26(1): 40-45. [8] Li Y A, Zhao Z Y. Passive tracking of underwater targets using dual observation stations[C]//2019 16th International bhurban conference on applied sciences and technology. Islamabad: IBCAST, 2019: 867-872. [9] 李晓花. 基于信息融合的水下多目标跟踪技术研究[D]. 西安: 西北工业大学, 2016. [10] 刘忠, 周丰, 石章松, 等. 纯方位目标运动分析[M]. 北京: 国防工业出版社, 2009. [11] 张博宇. 被动观测水下目标运动分析技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2019. [12] 丁一, 张瑶, 李冠男. 神经网络校正的EKF在水下被动目标跟踪中的应用研究[J]. 小型微型计算机系统, 2020, 41(5): 897-901.Ding Yi, Zhang Yao, Li Guannan. Applicatlking of nerual network-aided extend kalman filtering technique in underwater pas-sive target tracking[J]. Journal of Chinese Computer Systems, 2020, 41(5): 897-901. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 1779
- HTML全文浏览量: 226
- PDF下载量: 131
- 被引次数: 0