Single-loop Robust Control of Permanent Magnet Synchronous Motors Based on Generalized Predictive Control
-
摘要: 为改进无人水下航行器(UUV)用永磁同步电机(PMSM)控制系统的动态性能和鲁棒性, 简化控制系统结构, 提出了一种基于广义预测控制的PMSM单环控制策略。该方法基于连续时间的PMSM模型, 通过优化新型目标函数的非线性广义预测控制策略, 设计了PMSM转速-电流单环控制器。同时采用电流约束策略, 避免了电流过大对电机和逆变控制器造成的损害。该控制器控制结构简单, 只需调节预测时域即可实现PMSM强鲁棒控制, 工程上易于实现。仿真实验结果表明, 所研究控制策略能有效抑制外部扰动和内部参数摄动的影响, 实现了UUV用PMSM控制系统的快速动态响应和强鲁棒性。Abstract: To improve the dynamic performance and robustness of the control system of permanent magnet synchronous motors (PMSMs) for unmanned undersea vehicles (UUVs) and simplify the structure of the control system, a single-loop control strategy based on generalized predictive control (GPC) is proposed. A novel objective function is optimized to design a single-loop speed-current PMSM controller based on the continuous-time PMSM model. Furthermore, a current-limiting strategy is employed to avoid any damage to the motor and inverter controller caused by extremely high currents. The controller has a simple structure. Further, robust PMSM control can be realized by only adjusting the prediction time domain; this is easy to implement in engineering applications. Simulation results show that the control strategy can effectively suppress the influence of external disturbance and internal parameter perturbation, thus realizing a fast dynamic response and strong robustness of the PMSM for UUVs.
-
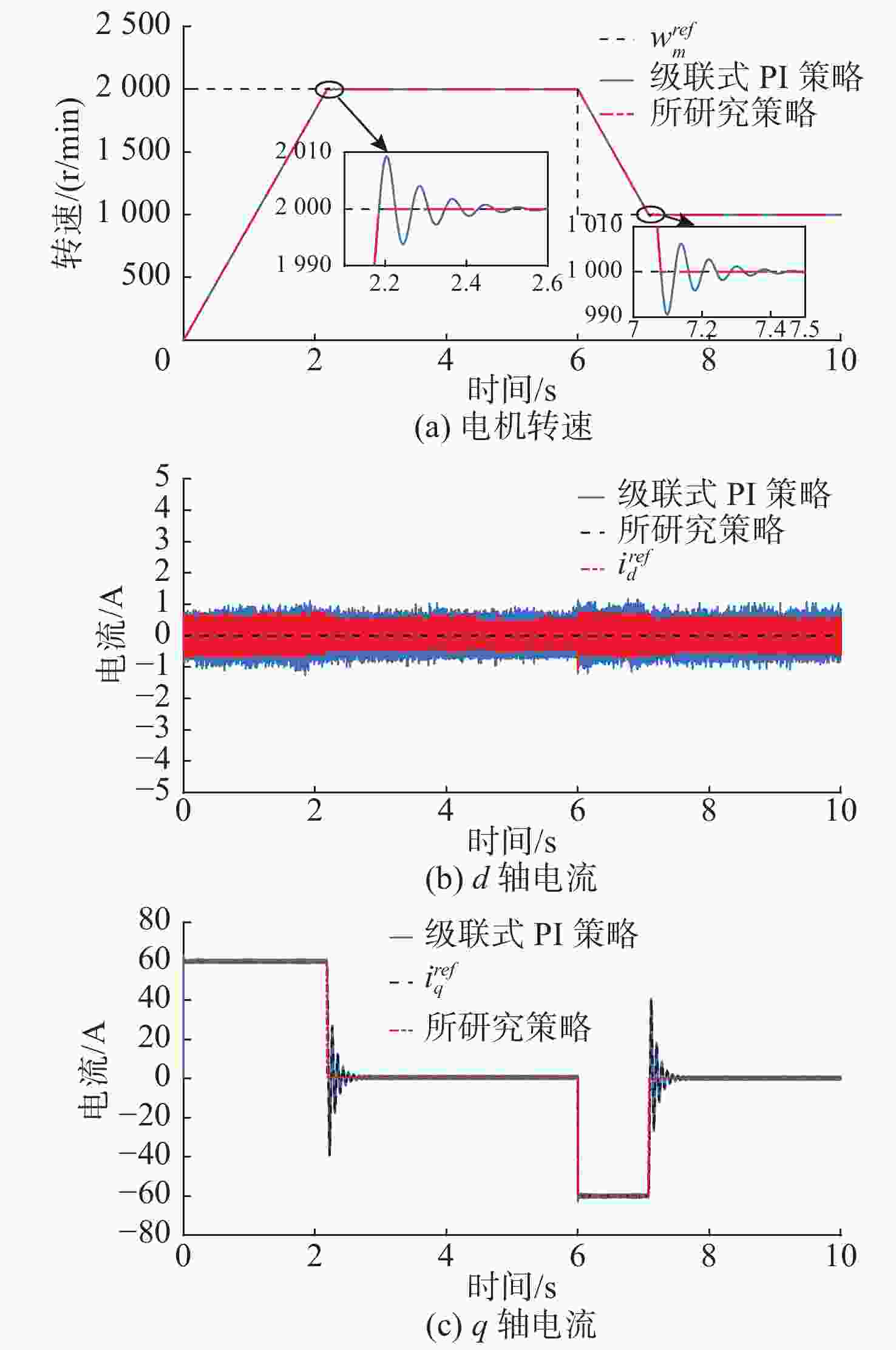
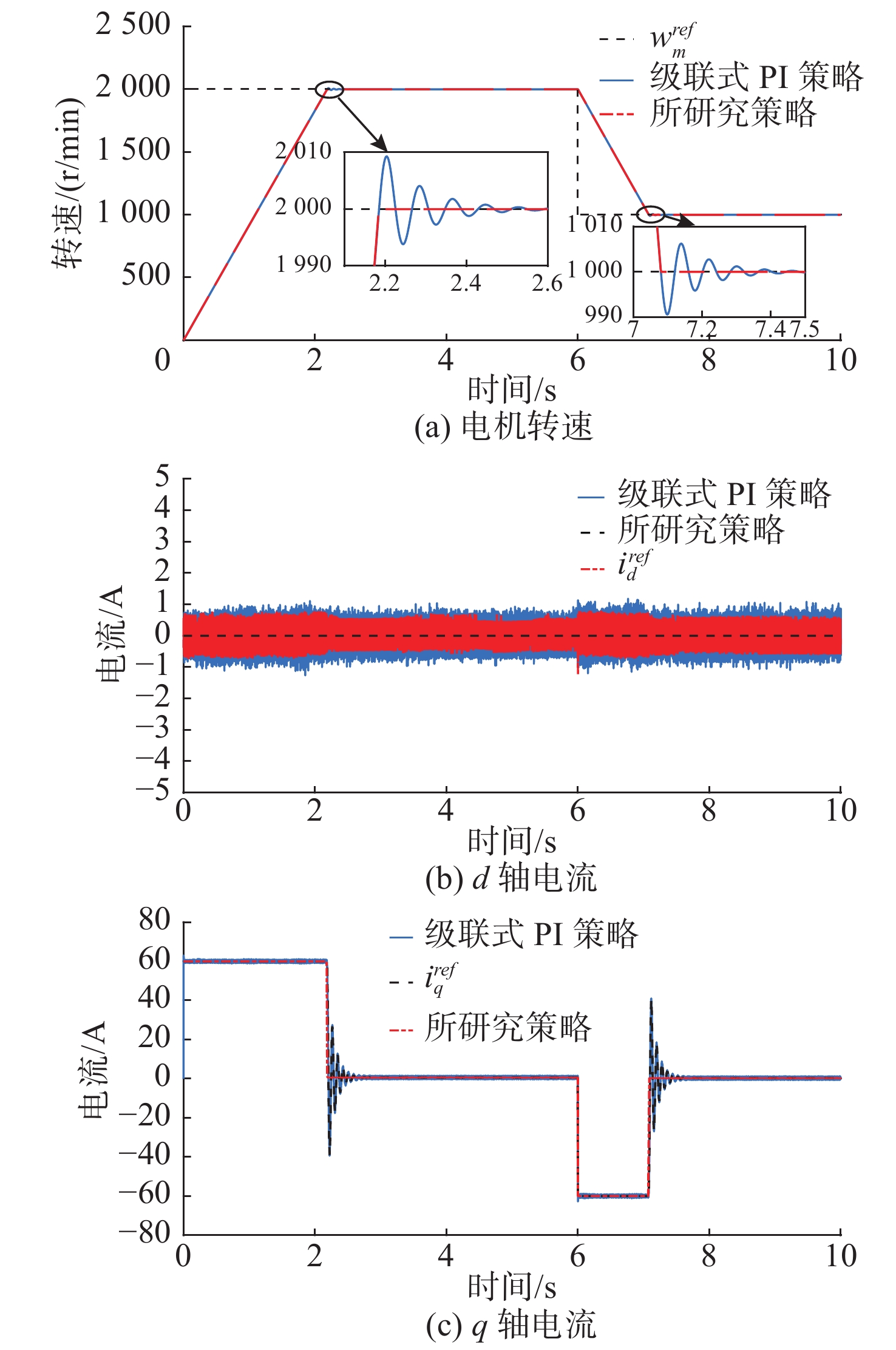
图 3 2种控制策略的仿真实验1结果
Figure 3. The simulation results of two control strategies of experiment 1
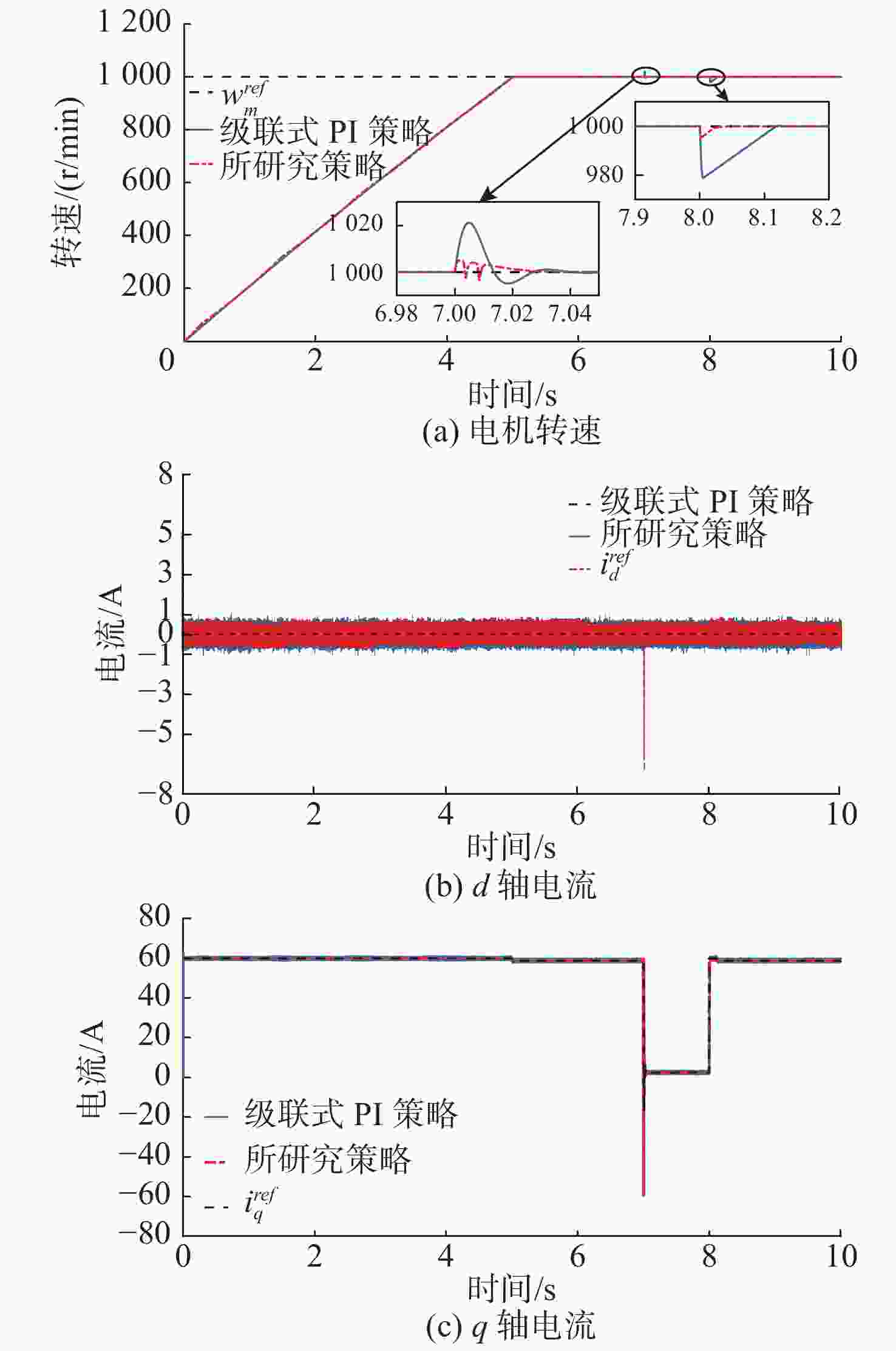
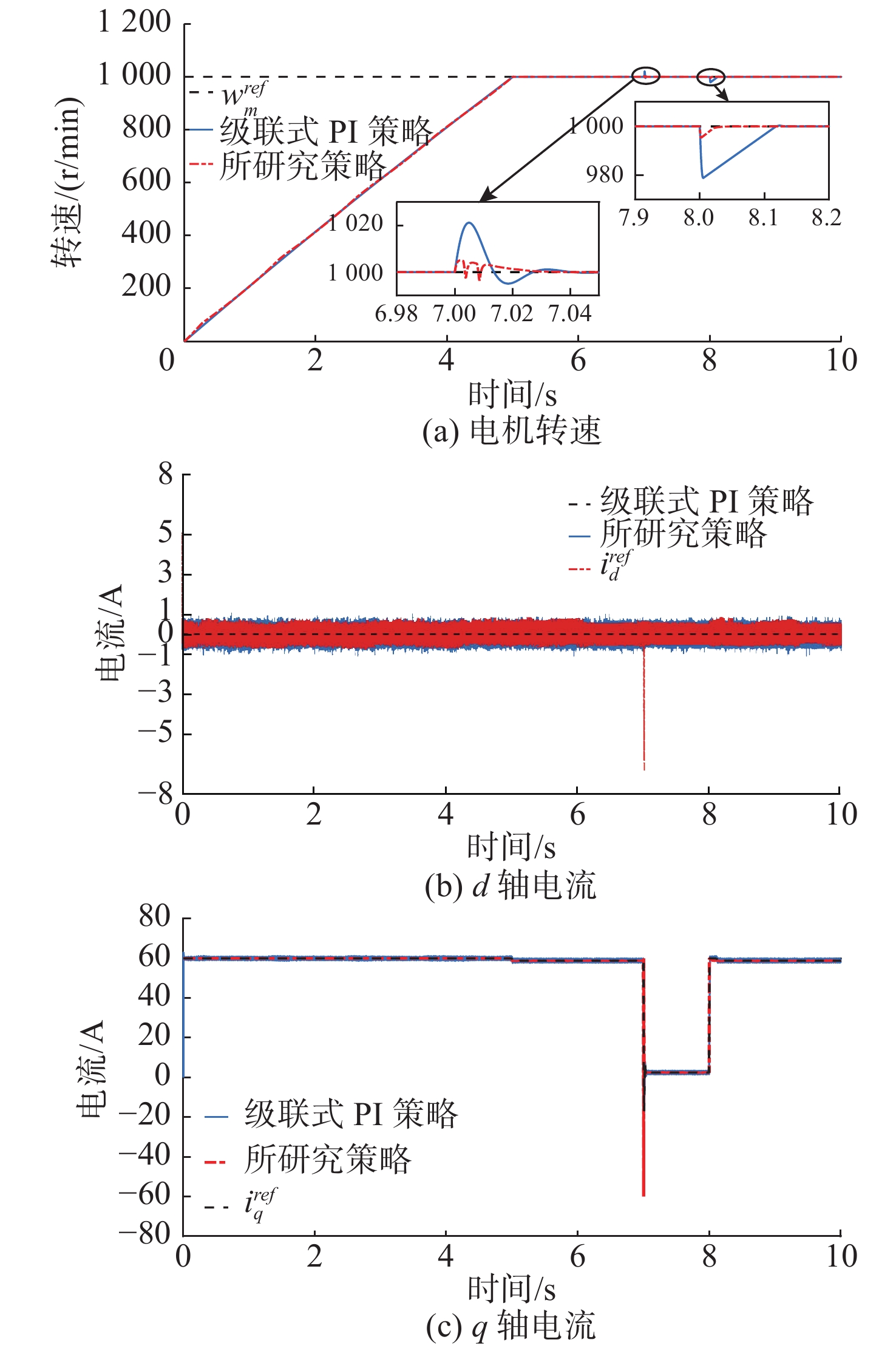
图 4 2种控制策略的仿真实验2结果
Figure 4. The simulation results of two control strategies of experiment 2
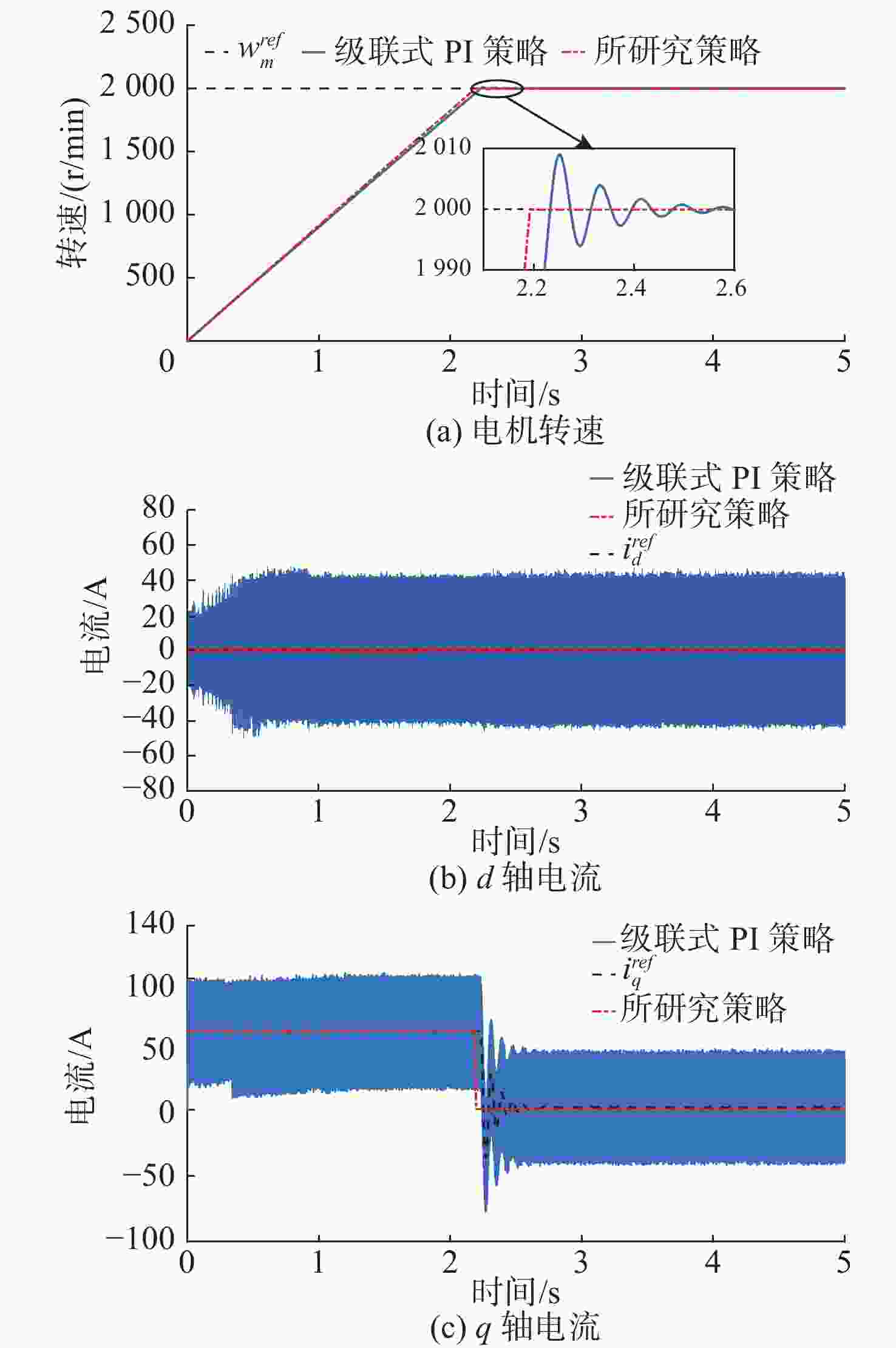
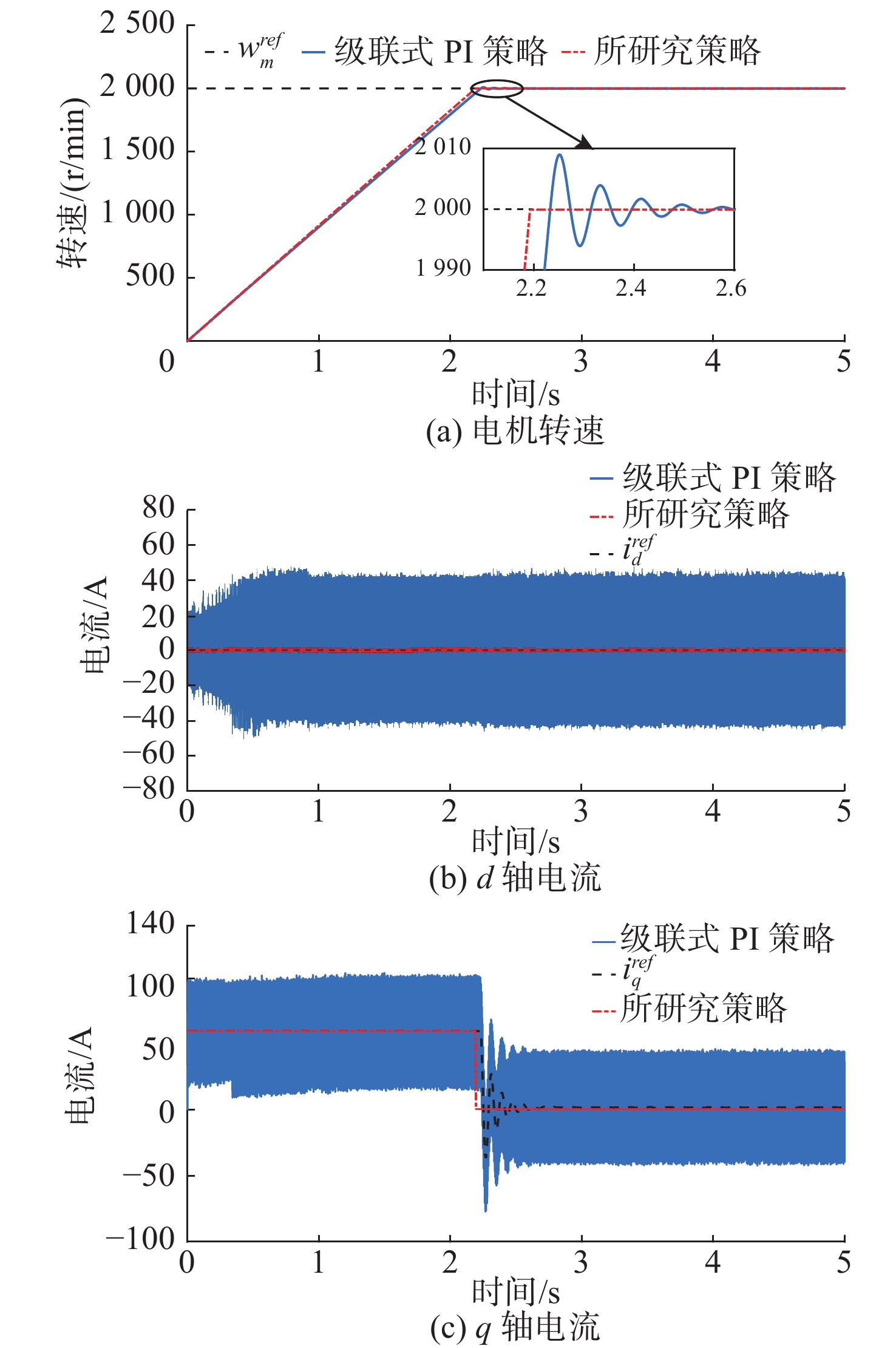
图 5 2种控制策略的仿真实验3结果
Figure 5. The simulation results of two control strategies of experiment 3
表 1 PMSM参数
Table 1. PMSM parameters
参数 数值 额定转速$/({\rm{r/min} })$ 3 000 直流母线电压$/{\text{V}}$ 311 定子电阻$/\Omega $ 0.028 3 直轴电感$/{\text{mH}}$ 0.274 永磁体磁链$/{\text{Wb}}$ 0.019 转动惯量$/{\text{(kg} } / { {\text{m} }^{ 2} }{\text{)} }$ 0.071 摩擦系数 0.008 极对数 4  下载: 导出CSV
下载: 导出CSV
表 2 仿真实验1结果性能指标
Table 2. The performance of simulation experiment 1
控制策略 起动时超
调量/(r/min)起动上升
时间/s减速时超
调量/(r/min)减速上升
时间/s$d$轴
电流$\left| \varDelta \right|$/A级联式PI控制 9.3 2.18 9.45 1.08 0.247 所研究控制 0 2.18 0 1.08 0.220
下载: 导出CSV
表 3 仿真实验2结果性能指标
Table 3. The performance of simulation experiment 2
控制策略 转速稳态
误差/(r/min)${t_1}$时刻后转速
变化/(r/min)${t_2}$时刻后转速
变化/(r/min)$d$轴电流
$\left| \varDelta \right|{\rm{/A} }$级联式PI控制 0 21.9 21.1 0.229 2 所研究控制 0 5.03 4.64 0.207 9
下载: 导出CSV
表 4 仿真实验3结果性能指标
Table 4. The performance indexes of two controllers of experiment 3
控制策略 超调量/(r/min) 上升时间/s $d$轴电流$\left| \varDelta \right|{\rm{/A} }$ 级联式PI控制 9.06 2.23 25.909 所研究控制 0 2.19 0.428 1
下载: 导出CSV
-
[1] 张国楠, 胡利民, 王建平, 等. 一种低速大扭矩永磁同步电机设计方案[J]. 水下无人系统学报, 2020, 28(6): 694-698. doi: 10.11993/j.issn.2096-3920.2020.06.015Zhang Guonan, Hu Limin, Wang Jianping, et al. A Design scheme of low-speed high-torque permanent magnet synchronous motor[J]. Journal of Unmanned Undersea Systems, 2020, 28(6): 694-698. doi: 10.11993/j.issn.2096-3920.2020.06.015 [2] 刘亚兵, 王海清, 胡钦龙, 等. UUV 用低速大扭矩推进电机控制方式对比分析[J]. 水下无人系统学报, 2020, 28(5): 547-554.Liu Yabing, Wang Haiqing, Hu Qinlong, et al. Comparative analysis on control mode of low-speed high-torque motor used in UUV[J]. Journal of Unmanned Undersea Systems, 2020, 28(5): 547-554. [3] 刘旭东. 基于预测控制的电动汽车用永磁同步电机控制策略与关键技术研究[D]. 济南: 山东大学, 2016. [4] Li L, Pei G, Liu J, et al. 2-DOF robust h-infinity control for permanent magnet synchronous motor with disturbance observer[J]. IEEE Transactions on Power Electronics, 2021, 36(3): 3462-72. doi: 10.1109/TPEL.2020.3015874 [5] Morawiec M. The adaptive backstepping control of permanent magnet synchronous motor supplied by current source inverter[J]. IEEE Transactions on Industrial Informatics, 2013, 9(2): 1047-55. doi: 10.1109/TII.2012.2223478 [6] Wu Y, Li G. Adaptive disturbance compensation finite control set optimal control for PMSM systems based on sliding mode extended state observer[J]. Mechanical Systems Signal Processing, 2018, 98: 402-414. [7] 崔佳伦. 基于广义预测控制的车用永磁同步电机鲁棒控制研究[D]. 昆明: 昆明理工大学, 2021. [8] 游江, 赵国良, 罗耀华, 等. 深潜艇推进电动机的H∞控制研究[J]. 船舶工程, 2006, 28(6): 13-17. doi: 10.3969/j.issn.1000-6982.2006.06.005You Jiang, Zhao Guoliang, Luo Yaohua, et al. Study of H∞ control for propulsion motor of deep submergence vehicle[J]. Ship Engineering, 2006, 28(6): 13-17. doi: 10.3969/j.issn.1000-6982.2006.06.005 [9] 张瀚文, 王俊雄. 基于自适应反步滑模的AUV推进器容错控制[J]. 水下无人系统学报, 2021, 29(4): 420-427. doi: 10.11993/j.issn.2096-3920.2021.04.008Zhang Hanwen, Wang Junxiong. Fault-tolerant control of AUV thruster based on adaptive backstepping sliding mode[J]. Journal of Unmanned Undersea Systems, 2021, 29(4): 420-427. doi: 10.11993/j.issn.2096-3920.2021.04.008 [10] 席裕庚. 预测控制[M]. 北京: 国防工业出版社, 2013. [11] Chen W, Ballance D J, Gawthrop P J. Optimal control of nonlinear systems: a predictive control approach[J]. Automatica, 2003, 39(4): 633-641. doi: 10.1016/S0005-1098(02)00272-8 [12] Errouissi R, Ouhrouche M, Chen W, et al. Robust cascaded nonlinear predictive control of a permanent magnet synchronous motor with antiwindup compensator[J]. IEEE Transactions on Industrial Electronics, 2011, 59(8): 3078-88. [13] Liu X, Zhang C, Li K, et al. Nonlinear predictive high order sliding mode control for permanent magnet synchronous motor drive system[J]. Journal of Mathematics and Computer Science, 2016, 16(3): 402-411. doi: 10.22436/jmcs.016.03.10 [14] Errouissi R, Ouhrouche M, Chen W H, et al. Robust nonlinear predictive controller for permanent-magnet synchronous motors with an optimized cost function[J]. IEEE Transactions on Industrial Electronics, 2011, 59(7): 2849-2858. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 585
- HTML全文浏览量: 369
- PDF下载量: 85
- 被引次数: 0