Inversion Estimation of AUV Attitude Based on Pressure Sensor Array
-
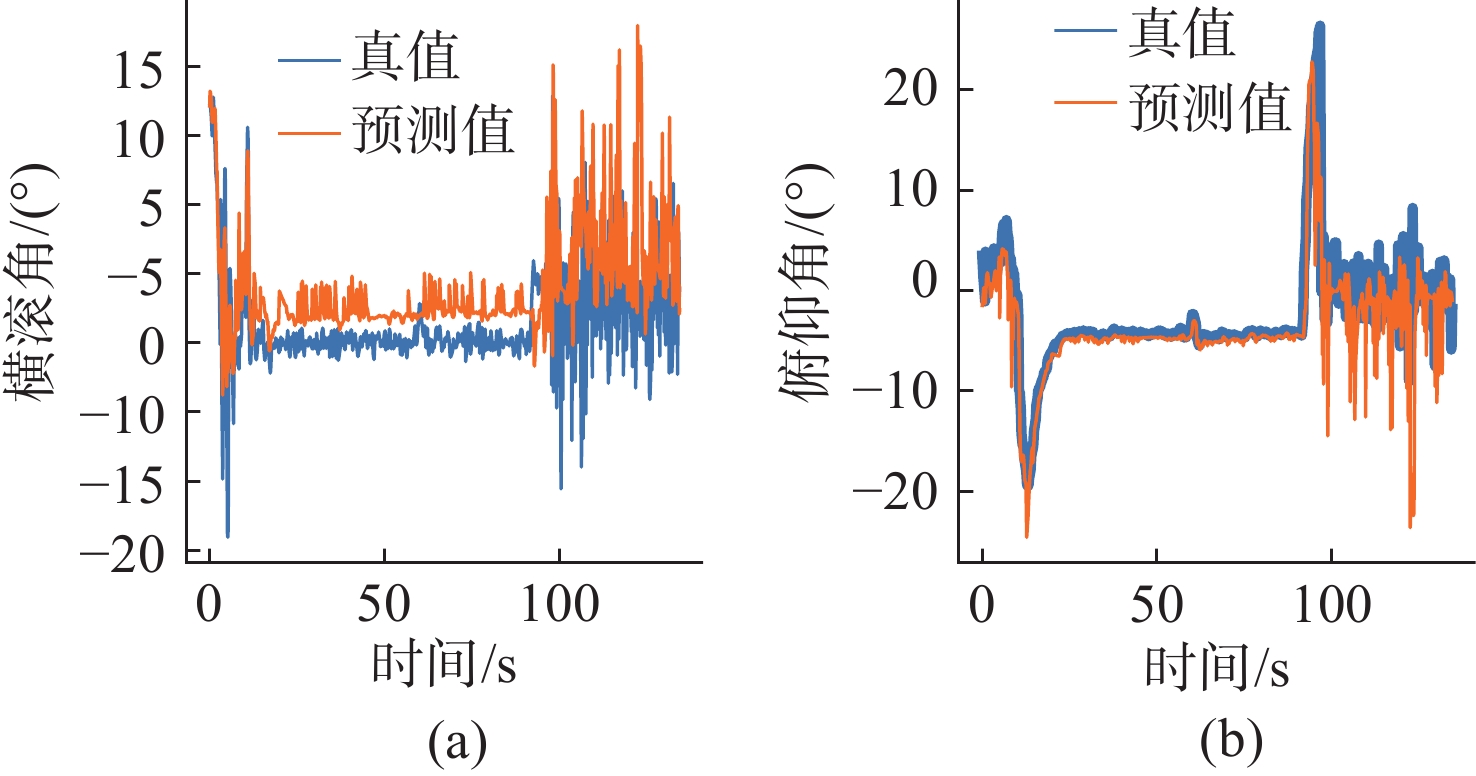
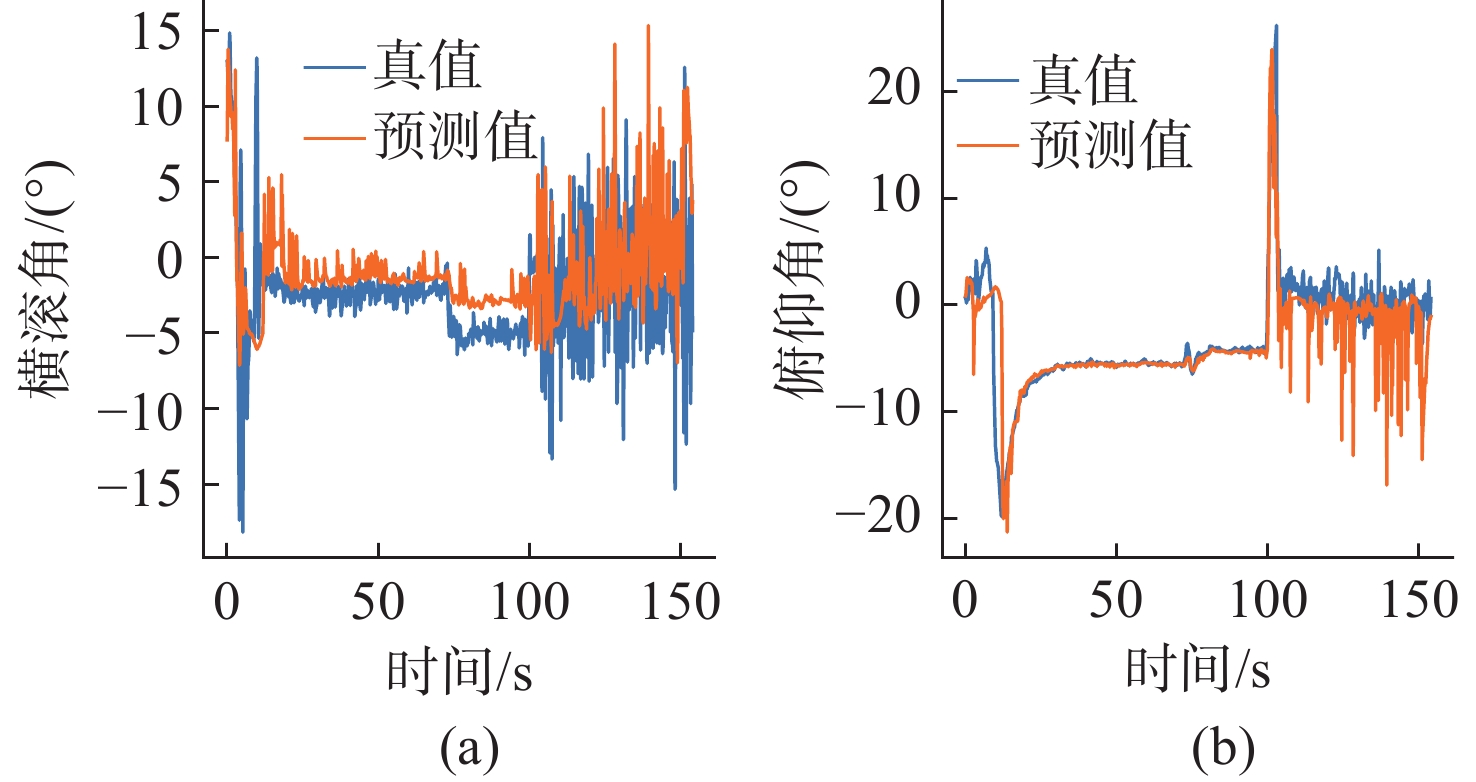
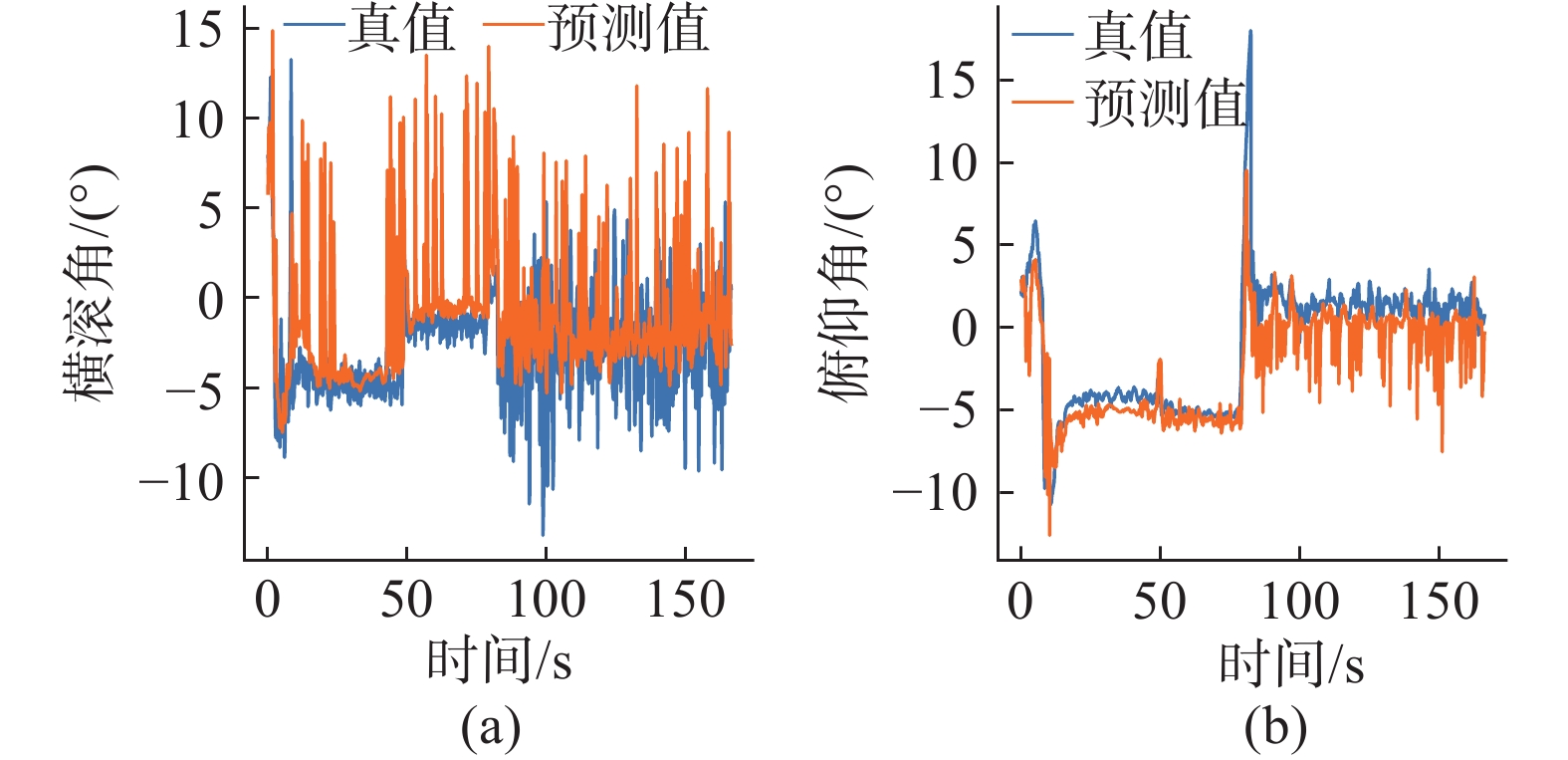
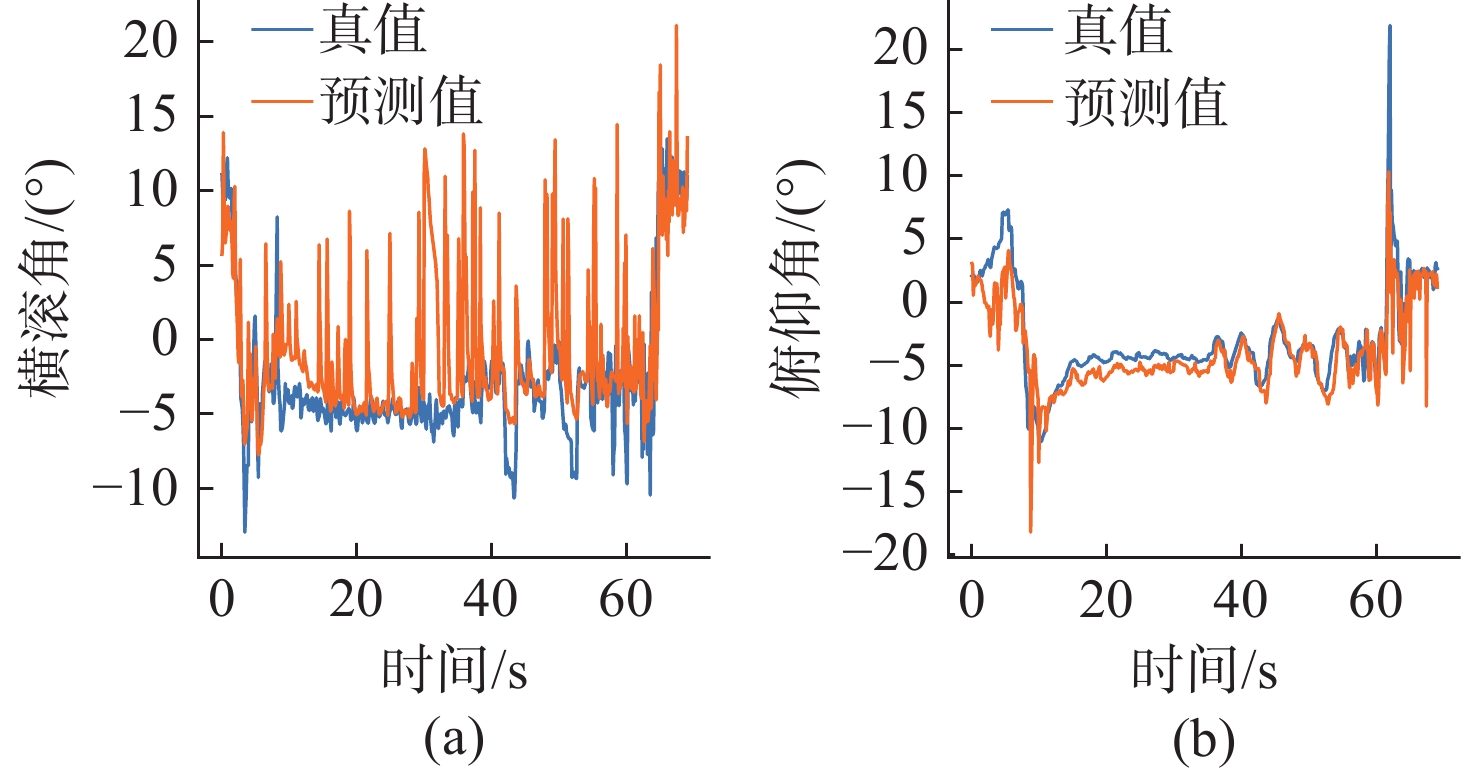
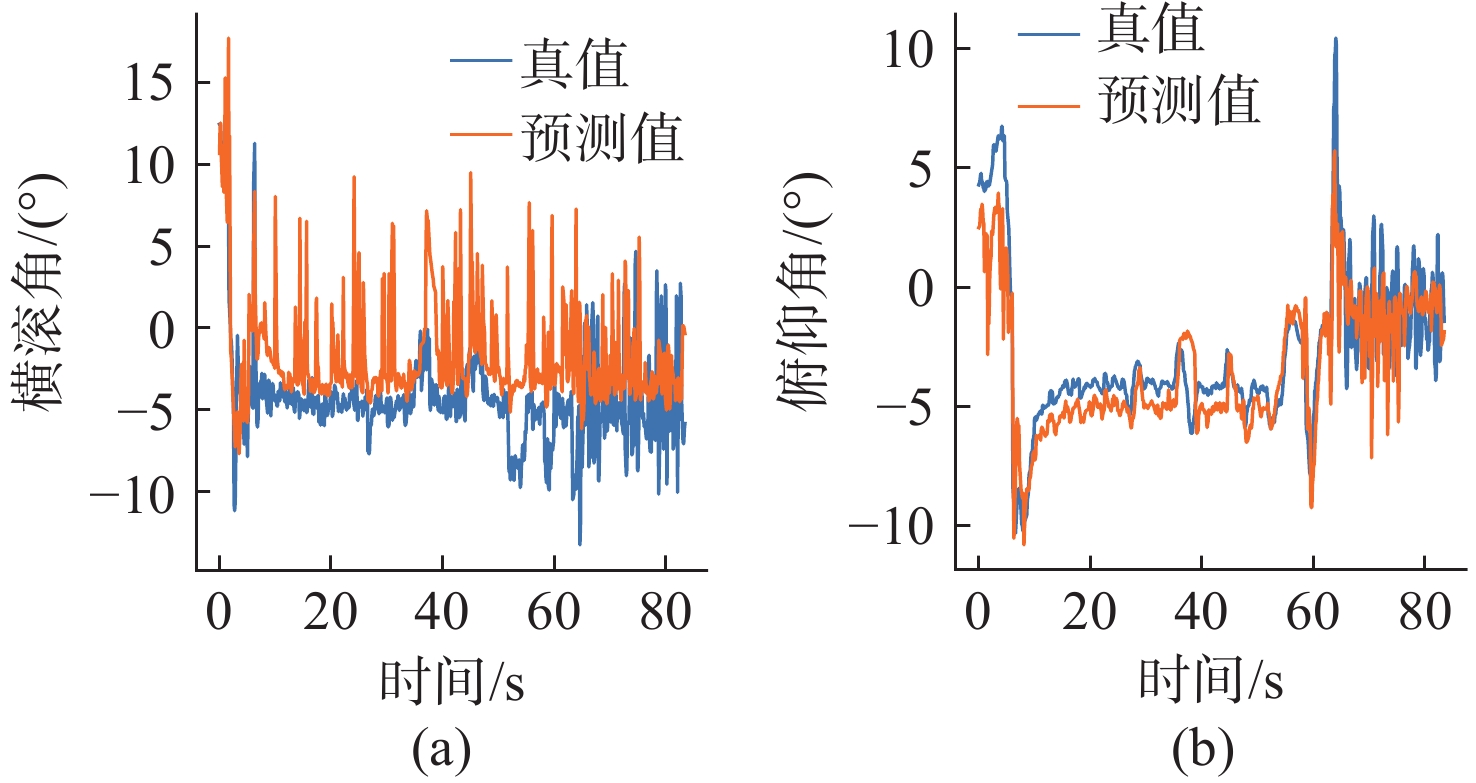
摘要: 姿态信息是自主导航的重要参数, 现有高精度导航设备价格昂贵、体积大, 因此小型化、低成本自主导航技术成为研究热点。受仿生学启发, 文中构建了基于压力传感器阵列的自主水下航行器(AUV)姿态反演估计模型, 将已知压强和姿态数据输入模型, 训练出模型参数, 从而利用压强数据反演估计姿态信息。按照轨迹、深度、速度等因素开展了多组试验, 验证了所提方法的有效性。试验结果表明, 利用基于压力传感器阵列的AUV姿态反演估计方法, 其俯仰角误差小于2.069 9°, 横滚角误差小于2.990 8°, 且不存在累积误差, 在自主导航系统中具有较高应用潜力。Abstract: Attitude is an essential parameter in autonomous navigation. Existing high-precision navigation sensors are expensive and large. Therefore, miniaturized and low-cost autonomous navigation technologies have become the research focus. Inspired by biomimetics, an inversion estimation model of autonomous undersea vehicle(AUV) attitude based on a pressure sensor array was constructed. The model takes known pressure and attitude data as input and trains the model parameters to use the pressure data to invert attitude information. The effectiveness of the proposed method was verified through multiple experiments with different trajectories, depths, speeds, and other factors. The experimental results show that using the proposed method, the estimated pitch angle error is below 2.069 9°, and the estimated roll angle error is below 2.990 8°. Furthermore, there are no cumulative attitude errors; this, implies that the proposed method has strong potential for applications in autonomous navigation systems.
-
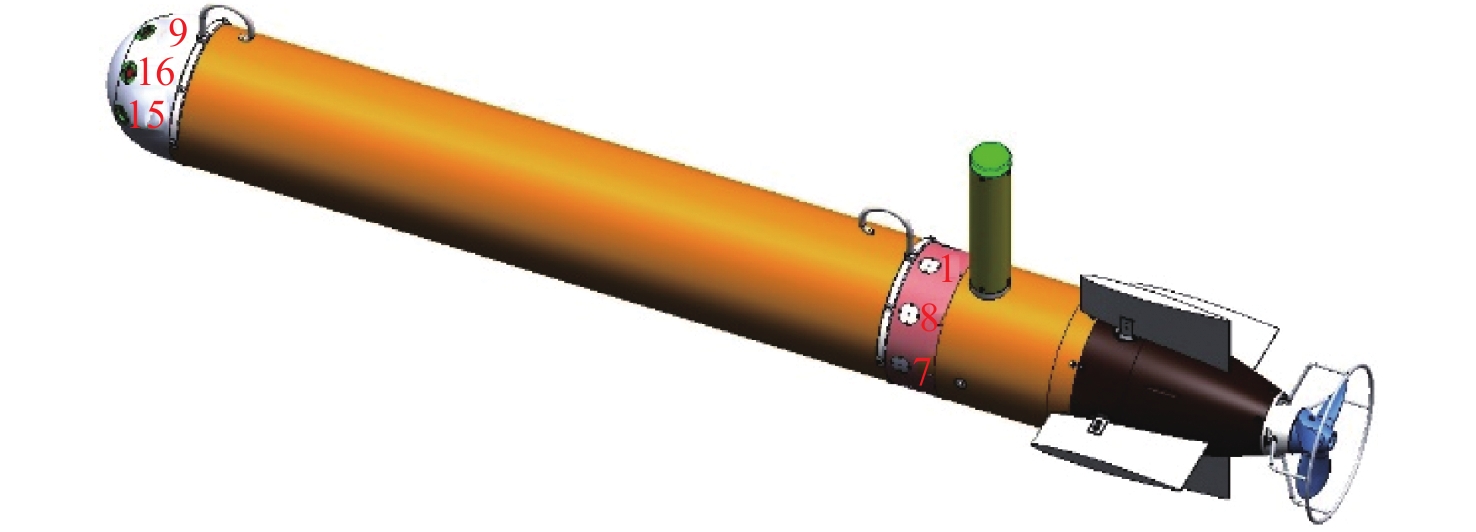
表 1 “天河二号”AUV规格参数
Table 1. Parameters of Tianhe II AUV
名称 参数 备注 直径/mm 180 — 长度/mm 1 729 — 质量/kg 35 不含配重 航程/km 40 航速3 kn 工作时间/h 8 — 通信方式 WIFI — 动力推进 DV 24 V/250 W直流永磁无刷电机 —  下载: 导出CSV
下载: 导出CSV
表 2 试验设置
Table 2. Experimental setting
试验序号 轨迹 深度/m 速度状态 转速/(r/min) 1 直线 2 匀速 500 2 直线 2 匀速 600 3 直线 4 匀速 500 4 直线 4 匀速 600 5 直线 2 加速 500~600 6 直线 2 减速 600~500 7 直线 4 加速 500~600 8 直线 4 减速 600~500 9 割草机 4 匀速 500 10 割草机 4 匀速 600 11 割草机 2 匀速 500 12 圆 2 匀速 500 13 圆 2 匀速 600 14 圆 4 匀速 600 15 直线 4 匀速 600 16 直线 4 加速 500~600 17 直线 4 减速 600~500 18 直线 2 减速 600~500 19 圆 2 匀速 600 20 割草机 2 匀速 600
下载: 导出CSV
表 3 不同隐藏层节点数时模型损失
Table 3. Loss of model with different hidden nodes
节点数 模型损失/(°)2 训练集 验证集 8 6.168 3 6.384 3 16 5.743 0 5.898 2 32 5.159 5 5.730 5 64 5.126 6 5.740 2
下载: 导出CSV
表 4 不同LR和迭代次数时验证集模型损失
Table 4. Loss of model on validation set with different LR and Epoch
LR 模型损失/(°)2 迭代次数 200 000 400 000 600 000 800 000 1 000 000 0.000 1 11.048 2 10.834 6 10.446 1 9.882 0 9.184 7 0.000 2 10.834 6 9.882 0 8.463 2 7.251 0 6.778 3 0.000 5 9.184 7 6.778 3 6.561 8 6.467 8 6.403 7 0.001 0 7.114 5 6.601 2 6.473 5 6.408 6 6.362 2 0.002 0 6.778 7 6.494 3 6.390 8 6.311 8 6.254 5 0.005 0 6.635 3 6.341 1 6.230 2 6.228 1 6.137 3 0.010 0 6.500 3 6.202 2 6.083 8 5.966 7 5.898 2 0.020 0 6.413 3 6.211 7 6.127 3 6.081 0 5.997 6 0.050 0 6.554 0 6.277 5 6.226 9 6.182 5 6.199 4 0.100 0 6.850 9 6.651 9 6.360 3 6.265 9 6.188 1 0.200 0 12.783 5 11.869 5 11.912 7 11.965 5 12.152 0
下载: 导出CSV
表 5 不同条件下的RMSE
Table 5. RMSE with different conditions
试验
序号RMSE/(°) 设定前横
滚角设定前俯
仰角设定后横
滚角设定后俯
仰角15 4.356 2 3.575 7 2.525 3 2.259 4 16 3.936 3 3.283 5 1.954 9 2.109 2 17 4.574 3 2.251 8 2.077 5 1.611 5 18 3.985 6 2.177 1 3.545 3 1.845 5 19 4.734 1 2.072 8 4.993 1 1.319 9 20 4.098 0 1.802 2 4.023 9 1.251 1
下载: 导出CSV
-
[1] Paull L, Saeedi S, Seto M, et al. AUV navigation and localization: A review[J]. IEEE Journal of Oceanic Engineering, 2014, 39(1): 131-150. doi: 10.1109/JOE.2013.2278891 [2] 郭银景, 孔芳, 张曼琳, 等. 自主水下航行器的组合导航系统综述[J]. 导航定位与授时, 2020, 7(5): 107-119. doi: 10.19306/j.cnki.2095-8110.2020.05.013GuoYinjing, Kong Fang, Zhang Manlin, et al. Review of integrated navigation system for AUV[J]. Navigation Positioning and Timing, 2020, 7(5): 107-119. doi: 10.19306/j.cnki.2095-8110.2020.05.013 [3] Fang T, Qian D. Non-damping system reset schemes for underwater SINS based on intermittent calibration information[J]. Measurement, 2021, 182: 109741. doi: 10.1016/j.measurement.2021.109741 [4] Mogdans J, Bleckmann H. Coping with flow: Behavior, neurophysiology and modeling of the fish lateral line system[J]. Biol Cybern, 2012, 106(11-12): 627-642. doi: 10.1007/s00422-012-0525-3 [5] Maruska K P. Morphology of the mechanosensory lateral line system in elasmobranch fishes: ecological and behavioral considerations[J]. Environmental Biology of Fishes, 2001, 60(1): 47-75. [6] Kroese A B, Schellart N A. Velocity- and acceleration-sensitive units in the trunk lateral line of the trout[J]. Journal of Neurophysiology, 1992, 68(6): 2212-2221. doi: 10.1152/jn.1992.68.6.2212 [7] Vitale G, D'alessandro A, Costanza A, et al. Low-cost underwater navigation systems by multi-pressure measurements and AHRS data[C]// Proceedings of the Oceans Aberdeen Conference. Aberdeen, England: IEEE, 2017. [8] Meurer C, Fuentes-Pérez J F, Palomeras N, et al. Differential pressure sensor speedometer for autonomous underwater vehicle velocity estimation[J]. IEEE Journal of Oceanic Engineering, 2020, 45(3): 946-978. doi: 10.1109/JOE.2019.2907822 [9] Fuentes-Pérez J F, Meurer C, Tuhtan J A, et al. Differential pressure sensors for underwater speedometry in variable velocity and acceleration conditions[J]. IEEE Journal of Oceanic Engineering, 2018, 43(2): 418-426. [10] Baruch A, Mazal Y, Braginsky B, et al. Attitude estimation of AUVs based on a network of pressure sensors[J]. IEEE Sensors Journal, 2020, 20: 7988. doi: 10.1109/JSEN.2020.2982607 [11] 曹植珺, 肖昌润. 机器学习在船舶流体力学中的应用综述[C]//第十二届武汉地区船舶与海洋工程研究生学术论坛论文集. 湖北, 武汉: 第十二届武汉地区船舶与海洋工程研究生学术论坛, 2019. [12] Jiang Y, Gong Z, Yang Z, et al. Underwater source localization using an artificial lateral line system with pressure and flow velocity sensor fusion[J]. IEEE/ASME Transactions on Mechatronics, 2021, 27(1): 245-255. [13] 蒋昂波, 王维维. ReLU激活函数优化研究[J]. 传感器与微系统, 2018, 37(2): 50-52. doi: 10.13873/J.1000-9787(2018)02-0050-03Jiang Angbo, Wang Weiwei. Research on optimization of ReLU activation function[J]. Transducer and Microsystem Technologies, 2018, 37(2): 50-52. doi: 10.13873/J.1000-9787(2018)02-0050-03 [14] Lecun Y, Bengio Y, Hinton G. Deep learning[J]. Nature, 2015, 521(7553): 436-444. doi: 10.1038/nature14539 [15] Tamer B. A new approach to linear filtering and prediction problems[M]//Control Theory: Twenty-Five Seminal Papers (1932-1981). US: Wiley-IEEE Press, 2001. [16] Särkkä S. Recursive Bayesian inference on stochastic differential equations[R]. Espoo, Finland: Helsinki University of Technology, 2006. -

 下载:
下载:






 点击查看大图
点击查看大图
计量
- 文章访问数: 904
- HTML全文浏览量: 255
- PDF下载量: 143
- 被引次数: 0