

Kalman Filter-Based Closed Cycle Steam Temperature Processing Method
-
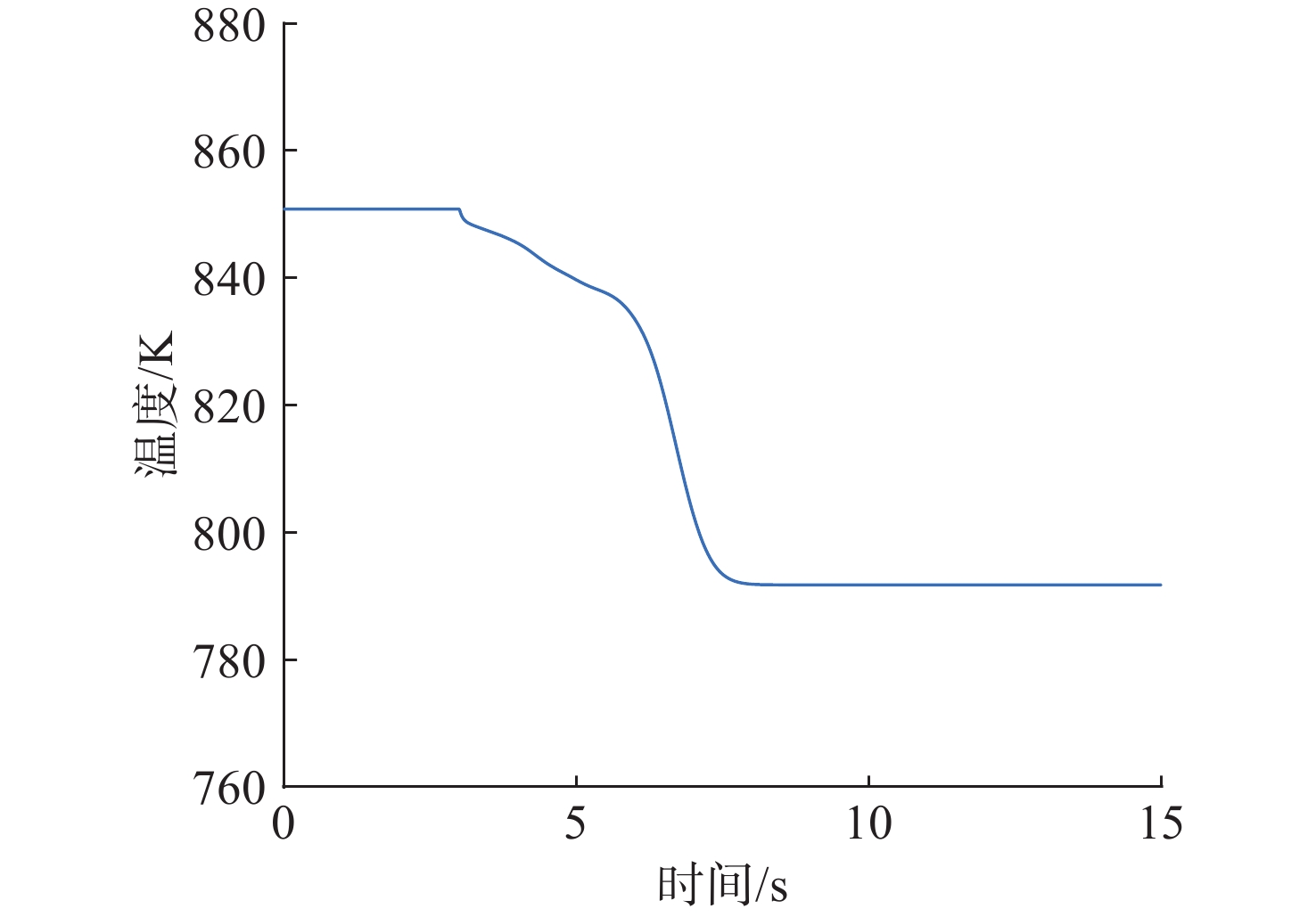
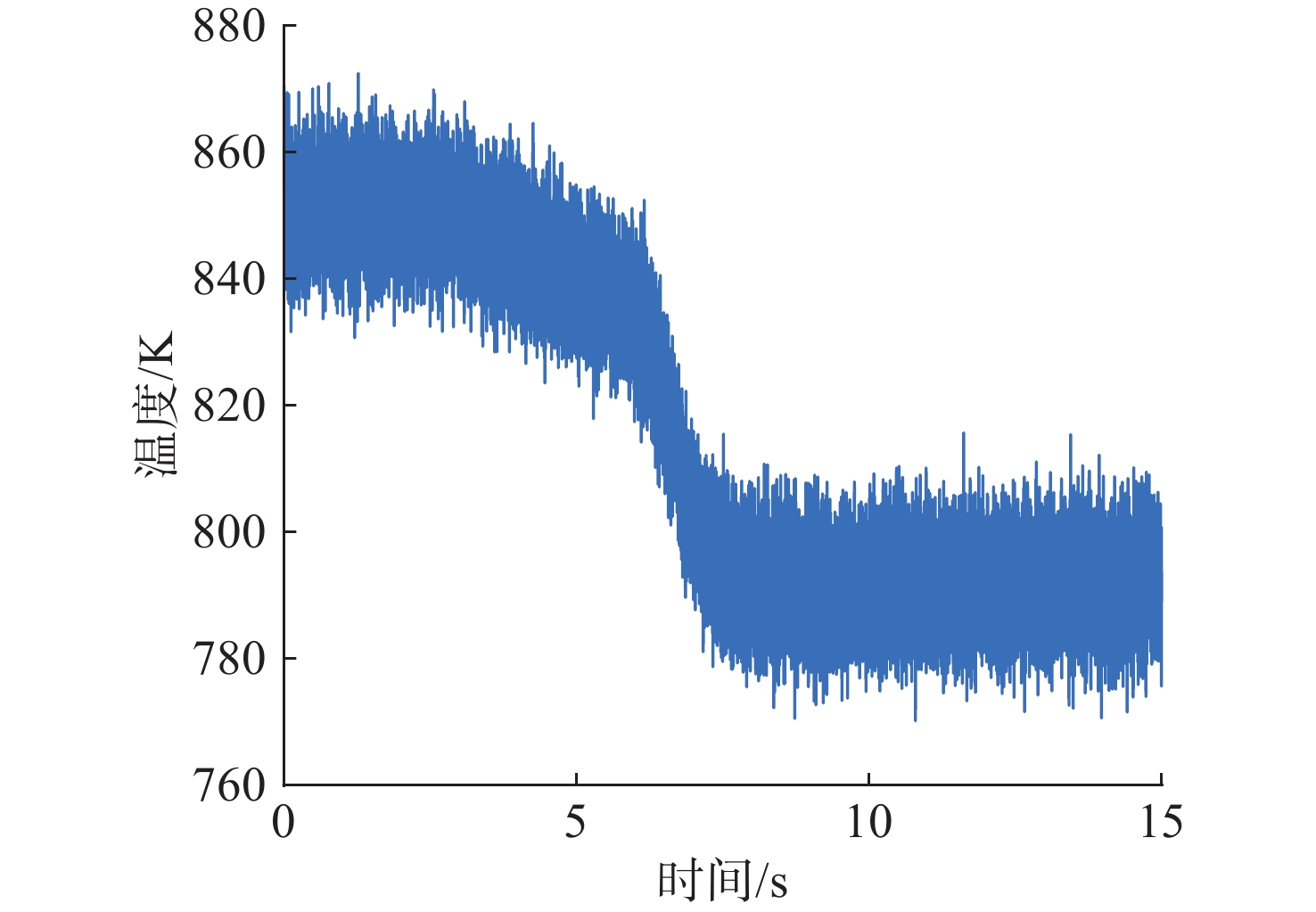
摘要: Li/SF6能源系统是一种新型高能热源, 其能量密度高、无产物排放的特点可支持水下装备构建闭式循环动力系统。能源系统中的螺旋管出口温度作为影响反应过程的关键反馈量, 在测量噪声和系统噪声干扰下会影响系统调控精度和稳定性, 对航行器的可靠工作产生负面作用。文中基于一维分布参数法仿真得到的蒸汽出口温度变化曲线, 针对常用降噪方法的不足, 设计了一种基于卡尔曼滤波原理在线降噪处理方法。经过与常规采用的滑动平均滤波和1阶低通滤波方法的对比可知, 该方法不仅在误差概率分布、信噪比方面具有明显优势, 而且能够缩短系统稳定时间, 改善系统动态特性。Abstract: Li/SF6 energy system is a new type of high energy power source, which can support the construction of a closed cycle power system for underwater equipment due to its high energy density and no product emission. As a key feedback parameter that affects the reaction process, the helical tube outlet temperature in the energy system will impact the precision and stability of the system control under the disturbance of measurement noise and system noise, bringing a negative effect on the reliability of the vehicle. In this paper, the steam outlet temperature curve was obtained by one-dimensional distributed parameter simulation. In view of the shortcomings of common noise reduction methods, an online noise reduction method based on Kalman filter principle was proposed. By comparing with the conventional sliding average filtering and first-order low-pass filtering methods, it can be seen that the proposed method has distinct advantages in terms of error probability distribution and signal-to-noise ratio. Besides, it can shorten the stable time and improve the dynamic characteristics of the system.
-
Key words:
- closed cycle /
- Kalman filter /
- steam temperature /
- signal processing
-

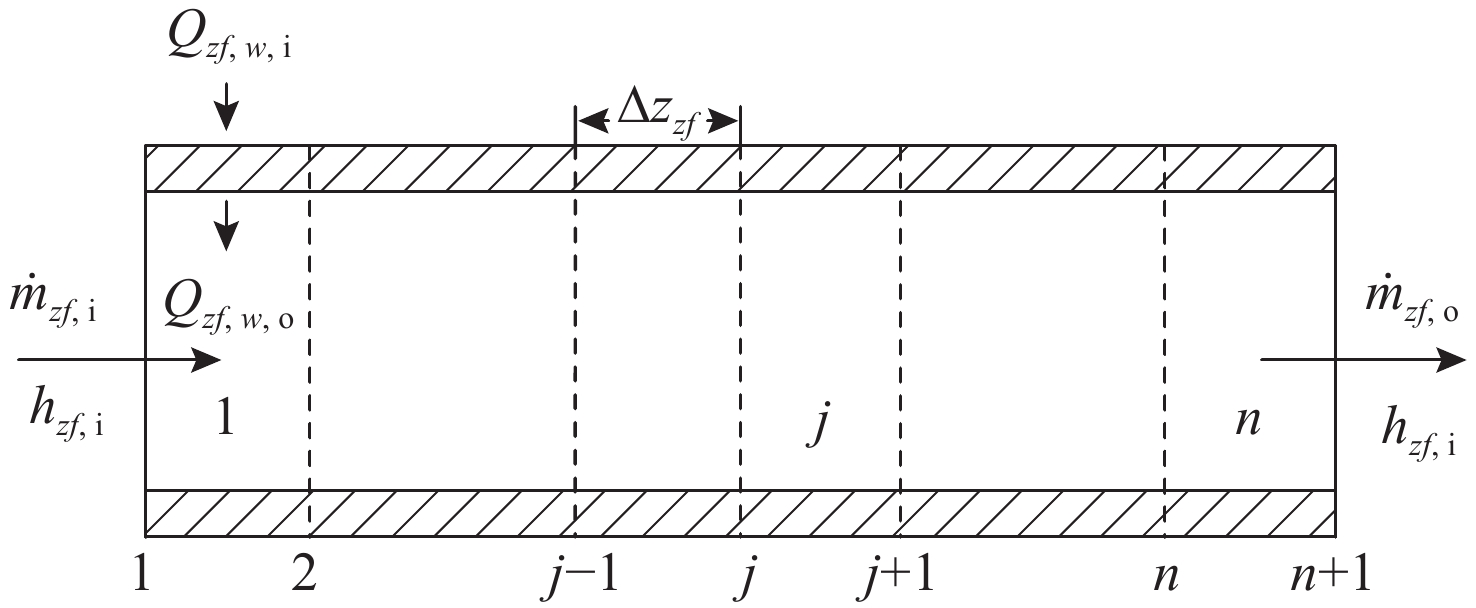
图 1 蒸发器一维分布参数模型控制体划分示意图
Figure 1. Division of one-dimensional distributed parameter model of evaporator

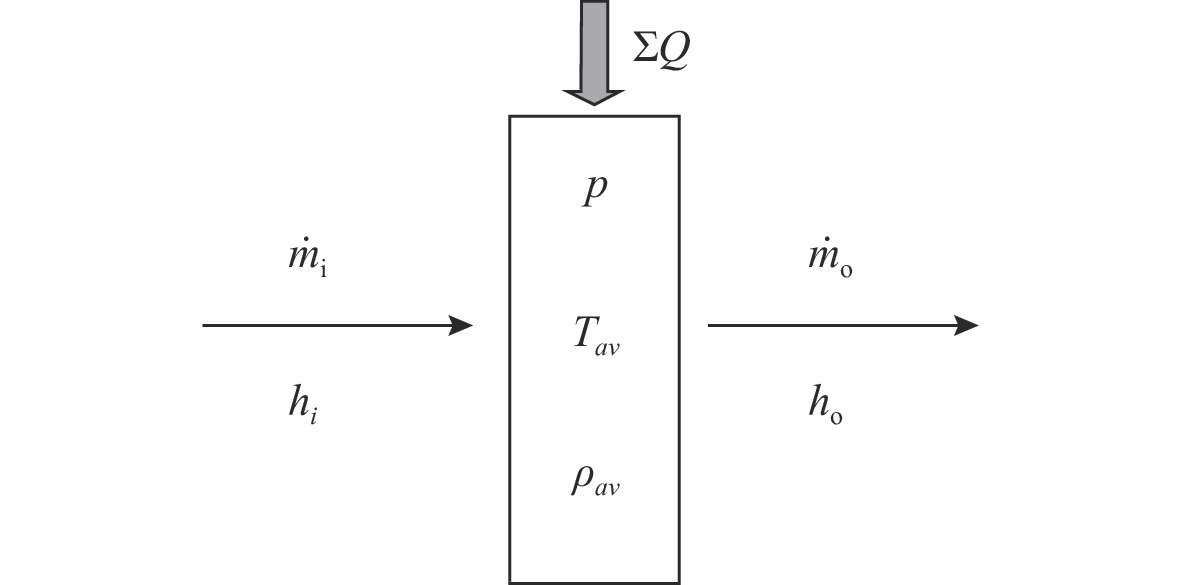
图 2 一维分布参数模型控制体示意图
Figure 2. Control body of one-dimensional distributed parameter model
表 2 仿真初始稳态值
Table 2. Initial steady-state value of simulation
压强
/MPa外壁面热流密度
/(W/m)入口质量流量
/(g/s)入口温度
/K6.5 2560 13.4 467  下载: 导出CSV
下载: 导出CSV
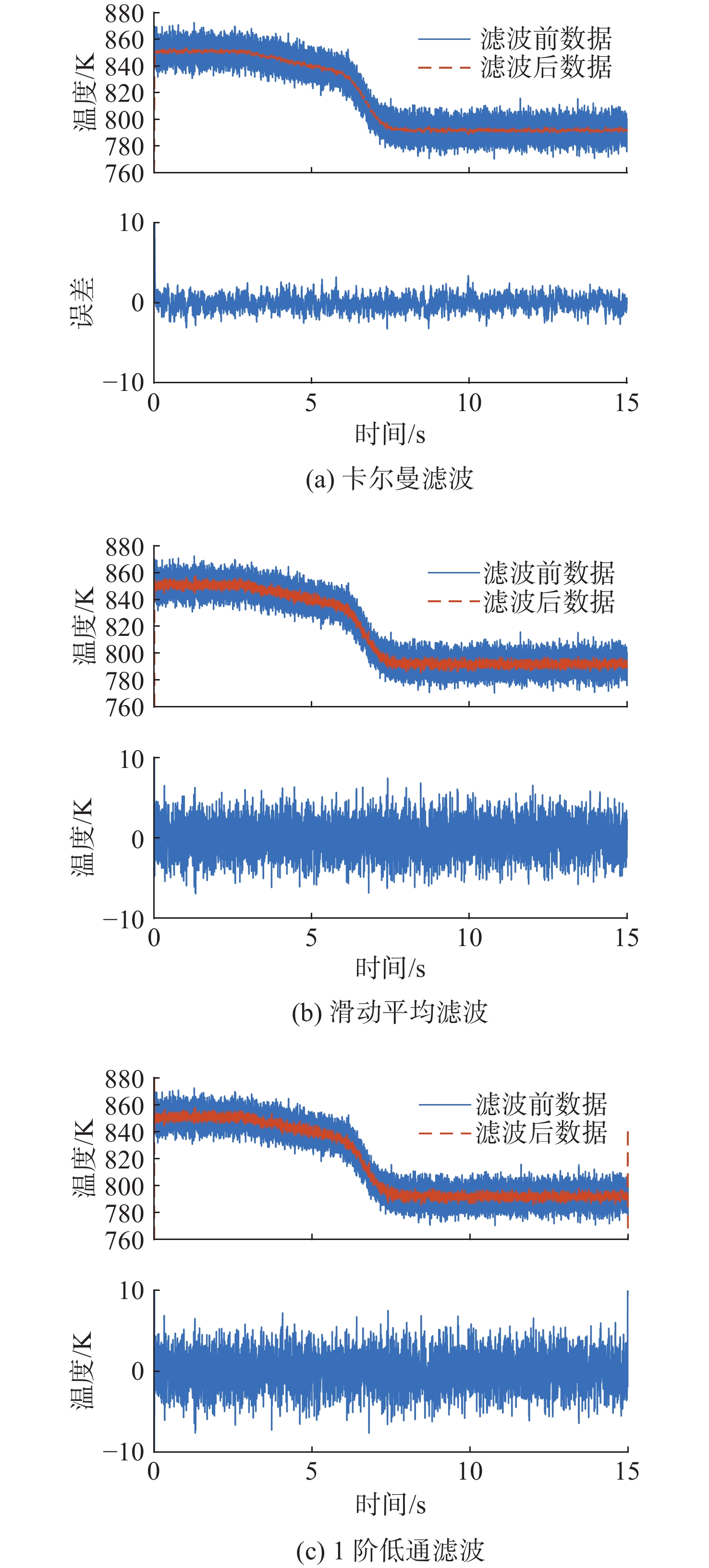
表 3 不同滤波方法处理后的信号SNR
Table 3. SNR of signal processed by different filtering methods
信号类型 SNR/dB 原始信号 41.31 卡尔曼滤波后信号 49.63 滑动平均滤波后信号 42.29 1阶低通滤波后信号 45.48
下载: 导出CSV
-
[1] 黄庆, 卜建杰, 郑邯勇. Li/SF6热源在鱼雷和UUV推进系统中的应用[J]. 舰船科学技术, 2006, 28(2): 67-71.Huang Qing, Bu Jianjie, Zheng Hanyong. The application of Li/SF6 heat source in the torpedo and the UUV propulsion systems[J]. Ship Science and Technology, 2006, 28(2): 67-71. [2] 白杰, 党建军, 曹蕾蕾. 基于Li/SF6能源的新型UUV动力系统热力性能分析[J]. 水下无人系统学报, 2019, 27(2): 212-216.Bai Jie, Dang Jianjun, Cao Leilei. Thermodynamic performance analysis of a new type of UUV power system based on Li/SF6 energy[J]. Journal of Unmanned Undersea Systems, 2019, 27(2): 212-216. [3] 白杰. 无人水下航行器新型热电联合闭式循环动力系统研究[D]. 西安: 西北工业大学, 2016. [4] 陈支厦, 郑邯勇, 赵文忠, 等. 鱼雷热动力能源研究现状及发展趋势[C]//OSEC首届兵器工程大会论文集. 重庆: OSEC, 2017. [5] 朱强, 郑邯勇, 王树峰, 等. 金属燃料动力系统在鱼雷和UUV上的应用[C]//OSEC首届兵器工程大会论文集. 重庆: OSEC, 2017. [6] Wang G, Yang Y, Wang S. Ocean thermal energy application technologies for unmanned underwater vehicles: A comprehensive review[J]. Applied Energy, 2020, 278: 115752. doi: 10.1016/j.apenergy.2020.115752 [7] Waters D F, Cadou C P. Modeling a hybrid rankine-cycle/fuel-cell underwater propulsion system based on aluminum-water combustion[J]. Journal of Power Sources, 2013, 221(1): 272-283. [8] 刘景云. Li/SF6双闭环动力系统自适应控制技术研究[C]//中国造船工程学会船舶力学学术委员会测试技术学组2021年学术会议论文集. 昆明: 中国造船工程学会, 2021. [9] 张艳杰, 梁鉴如, 马强, 等. 光纤温度传感系统中信号去噪方法[J]. 传感器与微系统, 2017, 36(12): 19-21.Zhang Yanjie, Liang Jianru, Ma Qiang, et al. Signal denoising method in optical fiber temperature sensing system[J]. Transducer and Microsystem Technologies, 2017, 36(12): 19-21. [10] 于洋, 李杰, 余松, 等. 基于卡尔曼滤波的电磁流量计信号处理[J]. 电子测量与仪器学报, 2022, 36(9): 183-189.Yu Yang, Li Jie, Yu Song, et al. Kalman filter-based electromagnetic flowmeter signal processing[J]. Journal of Electronic Measurement and Instrumentation, 2022, 36(9): 183-189. [11] 卢胜利, 刘美玲, 田彦彦. 基于卡尔曼滤波的多温度传感器数据融合系统[J]. 现代科学仪器, 2013(1): 65-68.Lu Shengli, Liu Meiling, Tian Yanyan. Data fusion system of multi temperature sensor based on Kalman filter[J]. Modern Scientific Instruments, 2013(1): 65-68. [12] 张春路. 制冷空调系统仿真原理与技术[M]. 北京: 化学工业出版社, 2012: 77-78. [13] 杨世铭, 陶文铨. 传热学[M]. 北京: 高等教育出版社, 2006. [14] 刘芬, 范洪强, 吕涛, 等. 基于卡尔曼滤波的含噪声小样本数据处理方法[J]. 上海大学学报(自然科学版), 2022, 28(3): 427-439.Liu Fen, Fan Hongqiang, Lü Tao, et al. Kalman filter based method for processing small noisy sample data[J]. Journal of Shanghai University (Natural science edition), 2022, 28(3): 427-439. [15] 梁民赞, 陆扬, 周新鹏. 一种抑制卡尔曼滤波发散的实时数据处理方法[J]. 声学技术, 2008(5): 761-764.Liang Minzan, Lu Yang, Zhou Xinpeng. A real-time data processing method for controlling Kalman filter instability[J]. Technical Acoustics, 2008(5): 761-764. [16] 张晓飞, 辛明真, 隋海琛, 等. 基于交互式多模型卡尔曼滤波的AUV超短基线跟踪算法[J]. 水下无人系统学报, 2022, 30(1): 29-36.Zhang Xiaofei, Xin Mingzhen, Sui Haichen. AUV ultra-short baseline tracking algorithm based on interactive multi-model Kalman filter[J]. Journal of Unmanned Undersea Systems, 2022, 30(1): 29-36. [17] 朱红运, 苗岩松, 庞建国. 基于卡尔曼滤波的遥测数据野值剔除方法[J]. 航天返回与遥感, 2021, 42(4): 137-143.Zhu Hongyun, Miao Yansong, Pang Jianguo. An outliers elimination method of telemetry data based on Kalman filter[J]. Spacecraft Recovery & Remote Sensing, 2021, 42(4): 137-143. [18] 曹玉波, 李健, 周琦祥, 等. 一阶惯性数字化滤波算法研究及应用[J]. 吉林化工学院学报, 2019, 36(11): 50-52.Cao Yubo, Li Jian, Zhou Qixiang, et al. Research and application on digital filter algorithm of first order inertial system[J]. Journal of Jilin Institute of Chemical Technology, 2019, 36(11): 50-52. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 459
- HTML全文浏览量: 259
- PDF下载量: 64
- 被引次数: 0





