

Research and Application of Amphibious Bionic Robots
-
摘要: 水陆两栖仿生机器人具备水陆多工况下的运动能力, 能够更好地完成复杂地形环境下的作业任务。文中概述了水陆两栖仿生机器人的发展背景、研究现状及主要应用。根据仿生借鉴程度的不同, 将两栖仿生机器人分为模仿运动模式类和模仿运动结构类, 分别介绍了国内外相关研究进展、分析了不同类型机器人的特点,阐述了水陆两栖仿生机器人的技术优势和典型应用场景。Abstract: By An amphibious bionic robot has good movement ability under several working conditions, so as to better perform tasks in complex terrain environments. In this study, the development background, research status and main applications of amphibious bionic robots are summarized. According to the degree of bionic reference, amphibious bionic robots are divided into two categories: imitating motion mode and imitating motion structure. The relevant research is introduced and the characteristics of different robot types are analyzed. Furthermore, the technical advantages and typical application scenarios of amphibious bionic robots are described.
-
Key words:
- amphibious bionic robot /
- motion mode /
- motion structure /
- application scenario
-

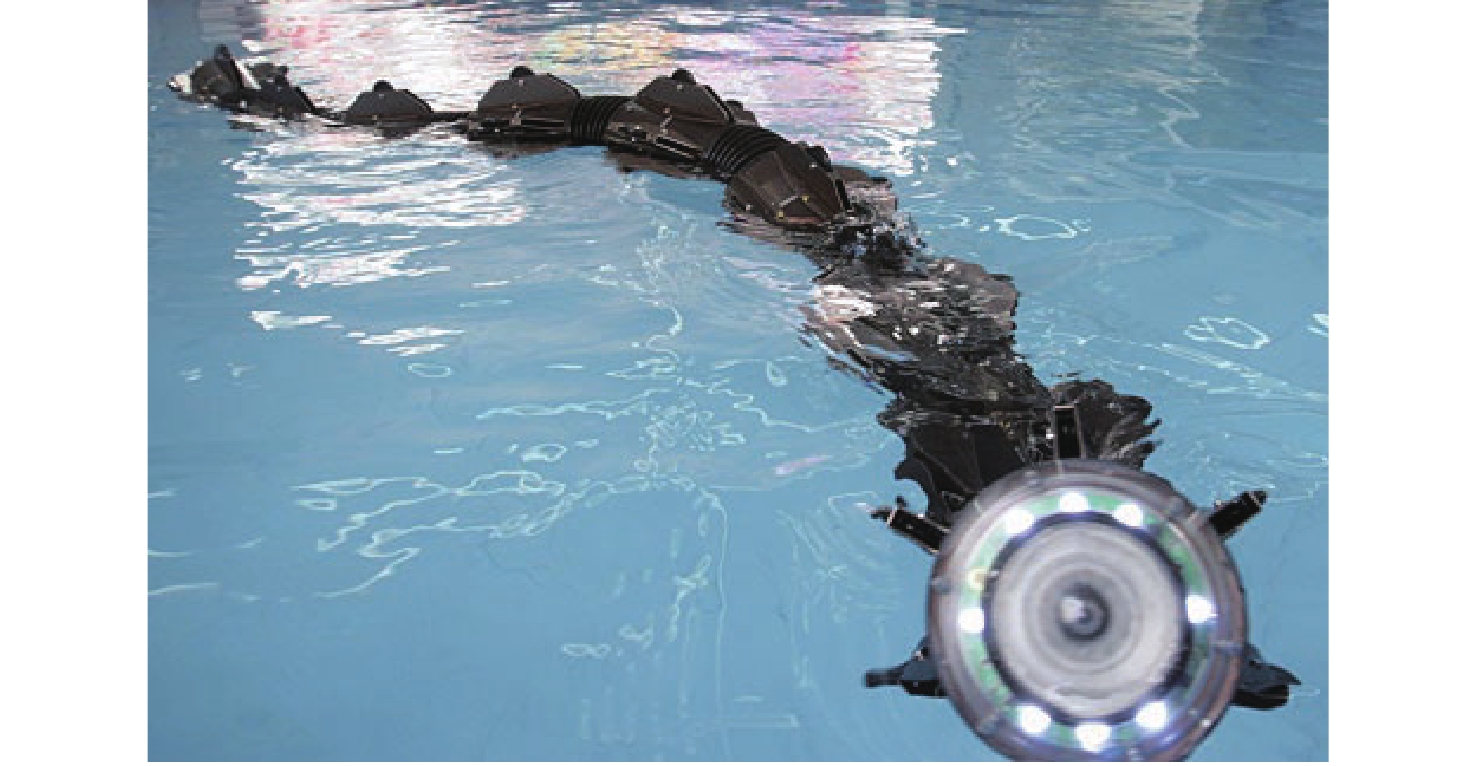
图 5 国防科技大学仿蛇形两栖机器人
Figure 5. Amphibious snake-like robot of National University of Defense Technology

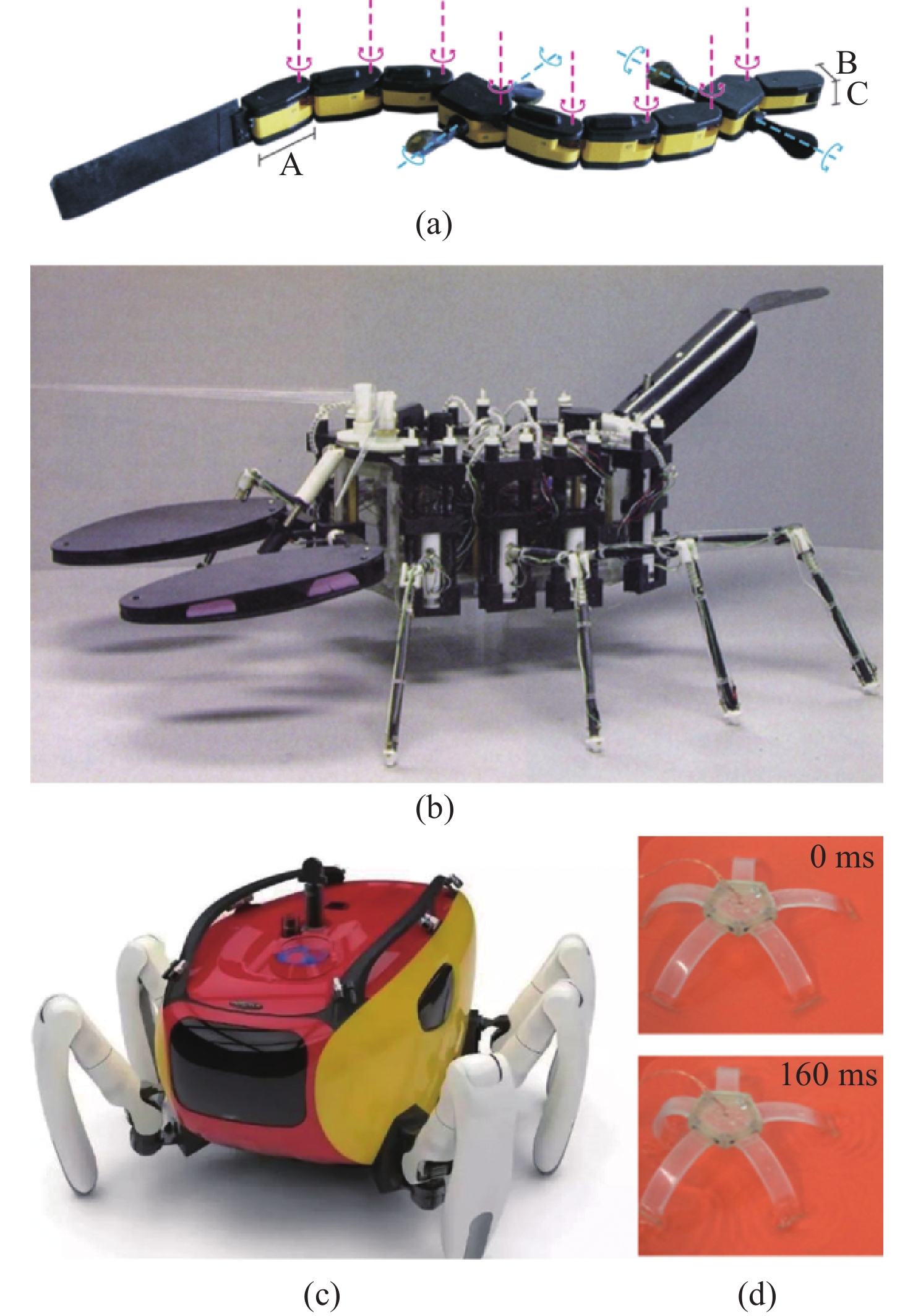
图 6 北京理工大学仿蛇形两栖机器人
Figure 6. Amphibious snake-like robot of Beijing Institute of Technology

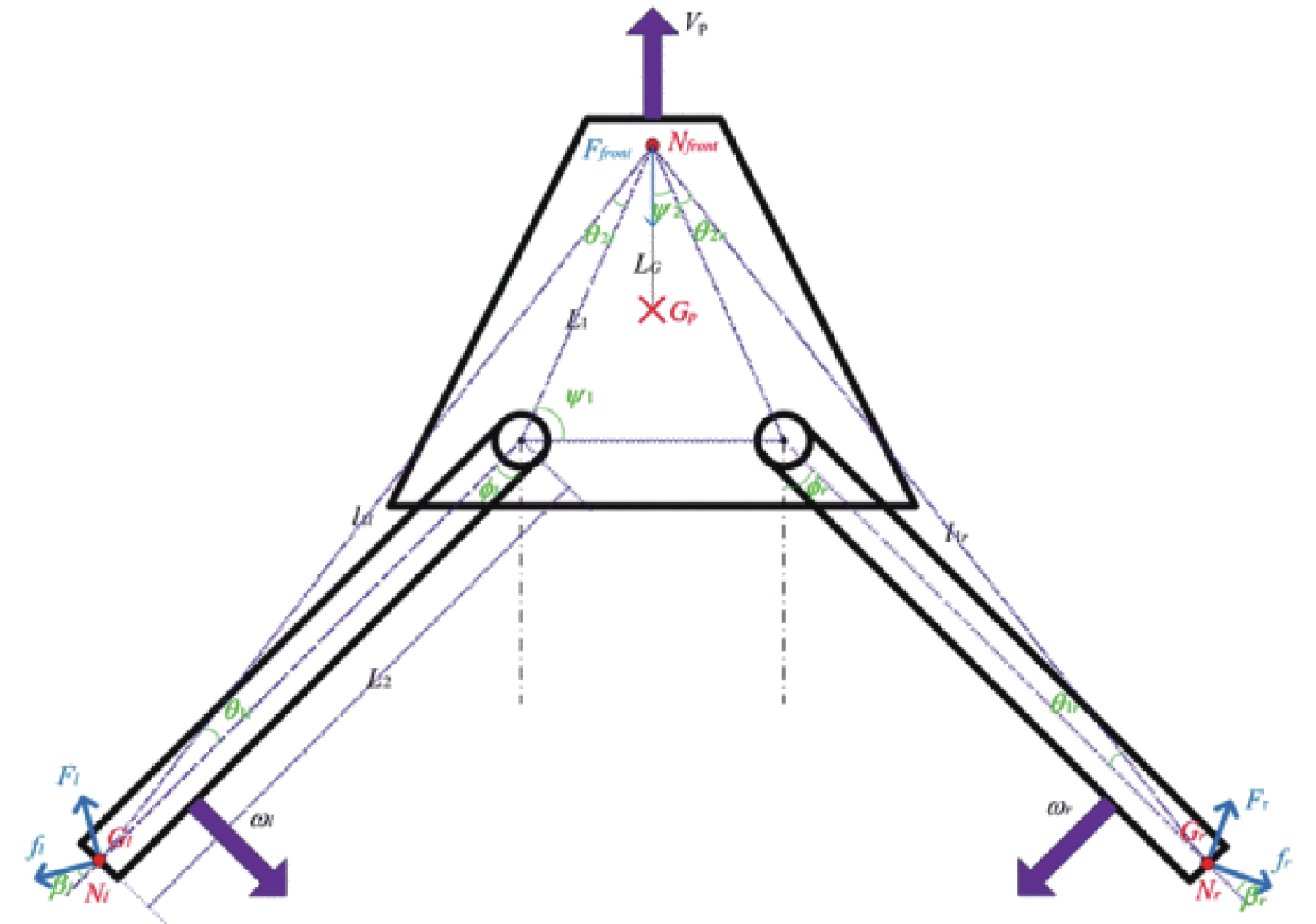
图 8 北京理工大学FroBot两栖机器人
Figure 8. Amphibious FroBot robot of Beijing Institute of Technology
-
[1] 苏宗帅. 水陆两栖仿生机器人研究进展及应用[J]. 国防科技, 2019, 40(4): 50-54. doi: 10.13943/j.issn1671-4547.2019.04.11Su Zong-shuai. Research Developments of Amphibious Robots and Applications[J]. National Defense Technology, 2019, 40(4): 50-54. doi: 10.13943/j.issn1671-4547.2019.04.11 [2] Ren K, Yu J. Research Status of Bionic Amphibious Robots: A Review[J]. Ocean Engineering, 2021, 227: 1-18. [3] 郑文哲. 基于CFD 的两栖仿生机器人水动力特性研究[D]. 西安: 西安理工大学, 2021. [4] 马宇科, 郑亮, 胡高凯, 等. 两栖球形机器人的路径规划策略[J]. 光学精密工程, 2020, 28(8): 1733-1742.Ma Yu-ke, Zheng Liang, Hu Gao-kai, et al. Path Planning Strategy of Amphibious Spherical Robot[J]. Optics and Precision Engineering, 2020, 28(8): 1733-1742. [5] 曾钧生. 融合水下滑翔的两栖仿生机械蟹总体结构设计和游动仿真分析[D]. 深圳: 深圳大学, 2020. [6] 杨清海, 喻俊志, 谭民, 等. 两栖仿生机器人研究综述[J]. 机器人, 2007, 29(6): 601-608. doi: 10.3321/j.issn:1002-0446.2007.06.016Yang Qing-hai, Yu Jun-zhi, Tan Min, et al. Amphibious Biomimetic Robots: A Review[J]. Robot, 2007, 29(6): 601-608. doi: 10.3321/j.issn:1002-0446.2007.06.016 [7] 赵旭. 基于单目视觉的蛇形机器人SLAM技术研究[D]. 北京: 北京理工大学, 2018. [8] 陈丽, 王越超, 李斌. 蛇形机器人研究现况与进展[J]. 机器人, 2002, 24(6): 559-563. doi: 10.3321/j.issn:1002-0446.2002.06.017Chen Li, Wang Yue-chao, Li Bin. Present State and Future Direction Towards Snake-robot Research[J]. Robot, 2002, 24(6): 559-563. doi: 10.3321/j.issn:1002-0446.2002.06.017 [9] Huang J, Du Z, Wang C, et al. Research Progress of a Multi-joint Snake Robot[C]//2022 8th International Conference on Control, Automation and Robotics (ICCAR). Qingdao, China: IEEE, 2022. [10] Hirose S. Snake-Like Robots, Machine Design of Biologically Inspired Robots[J]. IEEE Robotics & Automation Magazine, 2009, 16(1): 88-98. [11] Yamada H. Development of Amphibious Snake-like Robot Acm-R5[C]//36th International Symposium on Robotics(Isr 2005). Tokyo: IEEE, 2005. [12] Hirose S, Mori M, Yamada H, et al. Design and Control of Amphibious Snake-like Robot ACM-R5[C]//Nippon Kikai Gakkai Robotikusu, Mekatoronikusu Koenkai Koen Ronbunshu (CD-ROM), [S.l. : s.n.], 2005. [13] Crespi A, Badertscher A, Guignard A, et al. Swimming and Crawling with an Amphibious Snake Robot[C]//2005 IEEE International Conference on Robotics and Automation. Barcelona, Spain: IEEE, 2005. [14] 王握文. 五硕士造“蛇”记——我国首台蛇形机器人研制纪实[J]. 发明与革新, 2002(1): 15-16. [15] Yu S, Ma S, Li B, et al. An Amphibious Snake-like Robot with Terrestrial and Aquatic Gaits[C]//2011 IEEE International Conference on Robotics and Automation. Shanghai, China: IEEE, 2011. [16] 周耿. 水陆两栖蛙板机器人的设计、建模与控制[D]. 北京: 北京理工大学, 2016. [17] Yi Y, Geng Z, Zhang J Q, et al. Design, Modeling and Control of a Novel Amphibious Robot with Dual-swing-legs Propulsion Mechanism[C]//2015 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Hamburg, Germany: IEEE, 2015. [18] 张伟. 仿生青蛙机器人及其游动轨迹规划的研究[D]. 哈尔滨: 哈尔滨工业大学, 2017. [19] 党红星. 仿生龟水下清淤机器人的机构设计与步态研究[D]. 哈尔滨: 哈尔滨工程大学, 2021. [20] Baines R, Patiballa S K, Booth J, et al. Multi-environment Robotic Transitions through Adaptive Morphogenesis[J]. Nature, 2022, 610(7931): 283-289. doi: 10.1038/s41586-022-05188-w [21] Crespi A, Karakasiliotis K, Guignard A, et al. Salamandra Robotica II: An Amphibious Robot to Study Salamander-like Swimming and Walking Gaits[J]. IEEE Transactions on Robotics, 2013, 29(2): 308-320. doi: 10.1109/TRO.2012.2234311 [22] Chalmers P. Lobster Special[J]. Mechanical Engineering, 2000, 122(9): 82-84. doi: 10.1115/1.2000-SEP-5 [23] Ayers J. Underwater Walking[J]. Arthropod Structure & Development, 2004, 33(3): 347-360. [24] Kim J Y, Jun B H. Design of Six-legged Walking Robot, Little Crabster for Underwater Walking and Operation[J]. Advanced Robotics, 2014, 28(1/2): 77-89. [25] Jin H, Dong E, Alici G, et al. A Starfish Robot Based on Soft and Smart Modular Structure(SMS) Actuated by SMA Wires[J]. Bioinspiration & Biomimetics, 2016, 11(5): 1-9. [26] Ma X, Wang G, Liu K. Design and Optimization of a Multimode Amphibious Robot with Propeller-Leg[J]. IEEE Transactions on Robotics, 2022, 38(6): 3807-3820. [27] Boxerbaum A S, Werk P, Quinn R D, et al. Design of an Autonomous Amphibious Robot for Surf Zone Operation: Part I Mechanical Design for Multi-mode Mobility[C]//Proceedings 2005 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Barcelona, Spain: IEEE, 2005. [28] Liu B, Xu X, Pan D. Frog Plunge-diving of Deformable Amphibious Robot[C]//2022 IEEE International Conference on Robotics and Biomimetics(ROBIO). Xishuangbanna, China: IEEE, 2022. [29] Cai T, Pan D, Xu X, et al. Hydrodynamic Performance in Wave Condition of Autonomous Amphibious Robots[C]//Journal of Physics: Conference Series. Changsha China: IOP Publishing, 2023. [30] 何彦霖, 祝连庆, 孙广开, 等. 小型两栖球形机器人陆地运动建模及实验分析[J]. 仪器仪表学报, 2018, 39(12): 100-108. doi: 10.19650/j.cnki.cjsi.j1803967He Yan-lin, Zhu Lian-qing, Sun Guang-kai, et al. Study on On-land Kinematic Modeling and Experiment of Small-scaled Amphibious Spherical Robot[J]. Chinese Journal of Scientific Instrument, 2018, 39(12): 100-108. doi: 10.19650/j.cnki.cjsi.j1803967 [31] 郭书祥, 孙珊, 郭健. 新型仿生水下子母机器人系统设计[J]. 控制与决策, 2019, 34(5): 1004-1010.Guo Shu-xiang, Sun Shan, Guo Jian. Design of a Novel Biomimetic Underwater Mother-son Robot System[J]. Control and Decision, 2019, 34(5): 1004-1010. [32] Maciver M A, Fontaine E, Burdick J W. Designing Future Underwater Vehicles: Principles and Mechanisms of the Weakly Electric Fish[J]. IEEE Journal of Oceanic Engineering, 2004, 29(3): 651-659. doi: 10.1109/JOE.2004.833210 [33] Zeng Y, Hu Q, Yin S, et al. The Ground Motion Dynamics Analysis of a Bionic Amphibious Robot with Undulatory Fins[C]//2021 IEEE International Conference on Real-time Computing and Robotics(RCAR). Xining, China: IEEE, 2021. [34] 殷谦, 尚建忠, 蒋涛, 等. 柔性波动鳍两栖机器人鳍面结构设计与运动仿真[J]. 工程热物理学报, 2021, 42(11): 2954-2959.Yin Qian, Shang Jian-Zhong, Jiang Tao, et al. The Structural Design and Motion Simulation of the Flexible Undulating Fins on the Amphibious Robot[J]. Journal of Engineering Thermophysics, 2021, 42(11): 2954-2959. [35] 郁树梅, 王明辉, 马书根, 等. 水陆两栖蛇形机器人的研制及其陆地和水下步态[J]. 机械工程学报, 2012, 48(9): 18-25. doi: 10.3901/JME.2012.09.018Yu Shu-mei, Wang Ming-hui, Ma Shu-gen, et al. Development of an Amphibious Snake-like Robot and Its Gaits on Ground and in Water[J]. Journal of Mechanical Engineering, 2012, 48(9): 18-25. doi: 10.3901/JME.2012.09.018 [36] Wu M X, Xu X X, Zhao Q, et al. A Fully 3D-Printed Tortoise-Inspired Soft Robot with Terrains-Adaptive and Amphibious Landing Capabilities[J]. Advanced Materials Technologies, 2022, 7(12): 2200536. doi: 10.1002/admt.202200536 [37] Faudzi A A M, Razif M R M, Endo G, et al. Soft-amphibious Robot Using Thin and Soft McKibben Actuator[C]//2017 IEEE International Conference on Advanced Intelligent Mechatronics(AIM). Munich, Germany: IEEE, 2017. [38] Tang Y, Zhang Q, Lin G, et al. Switchable Adhesion Actuator for Amphibious Climbing Soft Robot[J]. Soft Robotics, 2018, 5(5): 592-600. doi: 10.1089/soro.2017.0133 [39] Hwang J H, Wang W D. Shape Memory Alloy-Based Soft Amphibious Robot Capable of Seal-Inspired Locomotion[J]. Advanced Materials Technologies, 2022, 7(6): 2101153. doi: 10.1002/admt.202101153 -

 下载:
下载:













 点击查看大图
点击查看大图
计量
- 文章访问数: 1630
- HTML全文浏览量: 768
- PDF下载量: 297
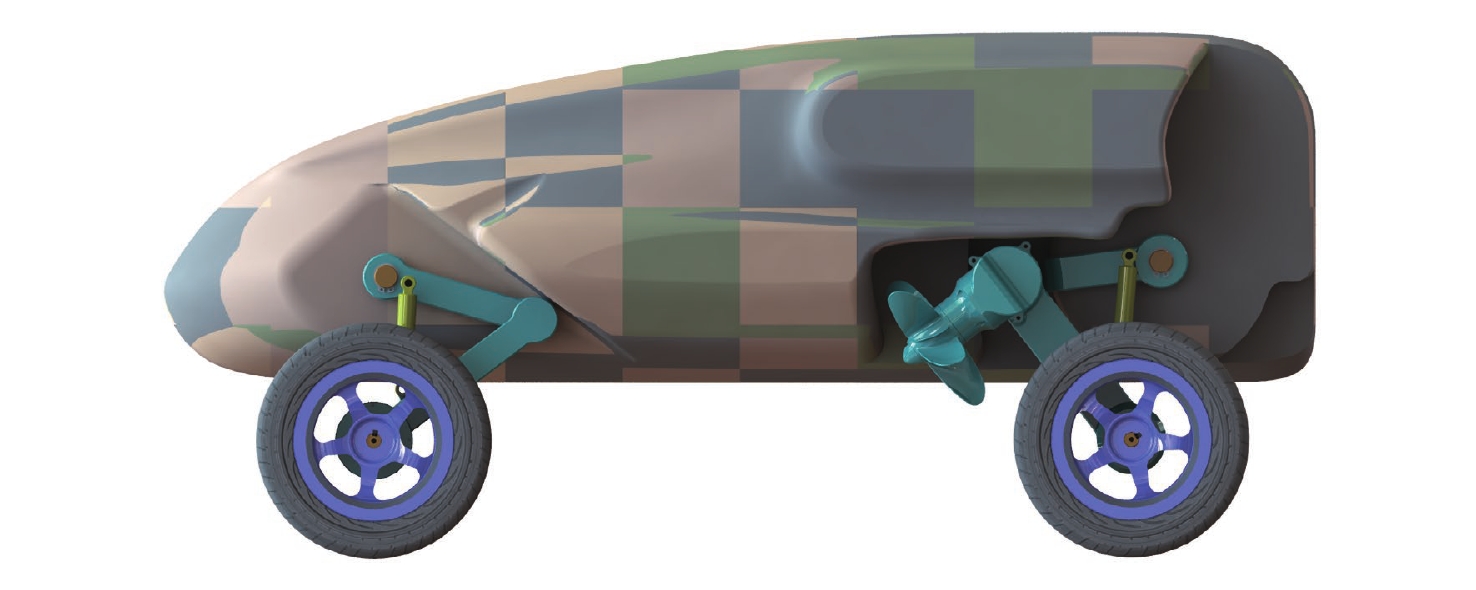
- 被引次数: 0
图(21)




