

Intelligent Control Method for AUV Formation under Different Communication and Positioning Methods: A Review
-
摘要: 综述了国内外自主水下航行器(AUV)在光学和声学2种不同通信定位方式下的编队智能控制方法。首先, 归纳了AUV编队的基础模型, 这些模型是考虑通信定位约束时智能控制方法设计的基础。其次, 针对光学与声学2种通信定位方式, 归纳了考虑通信定位约束时的技术难点和智能控制方法, 并对研究成果进行了总结。最后, 对AUV编队智能控制的发展趋势进行了分析和探讨。可为AUV编队智能控制方法的设计提供参考, 对AUV编队的理论研究和工程化应用具有借鉴意义。Abstract: The formation of intelligent control methods for autonomous undersea vehicles(AUVs) under two different communication and positioning methods of optics and acoustics are reviewed. First, the fundamental models of AUV formations, which are the basis for the design of intelligent control methods when considering communication and positioning constraints, are summarized. Second, the technical difficulties and intelligent control methods considering the communication and positioning constraints along with the research results are summarized for the optical and acoustic communication and positioning methods. Finally, the development trend of AUV formation intelligent control is analyzed and discussed. The findings presented in this paper can provide a reference for the design of AUV formation intelligent control methods and has reference significance for the theoretical research and engineering application of AUV formation.
-
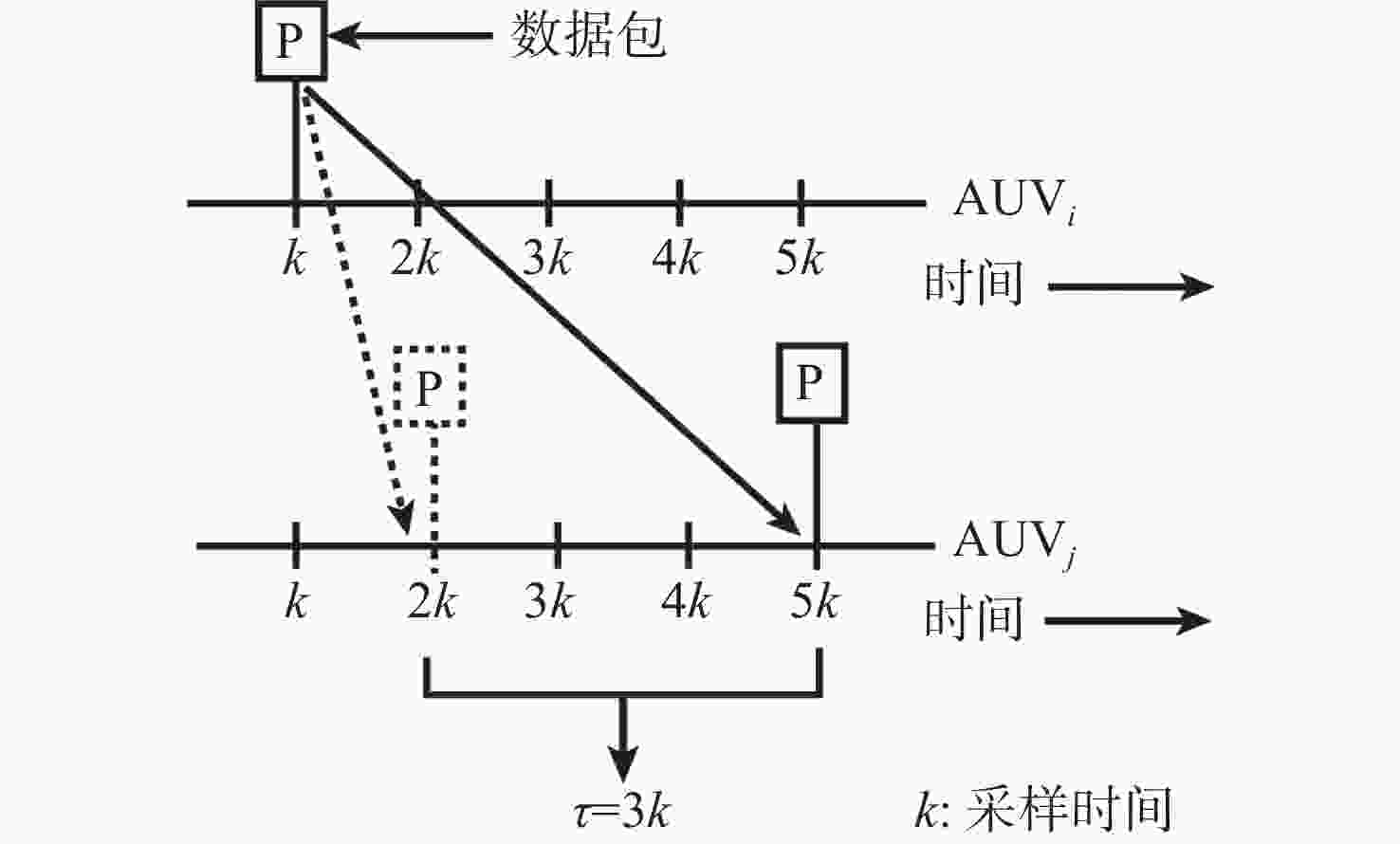
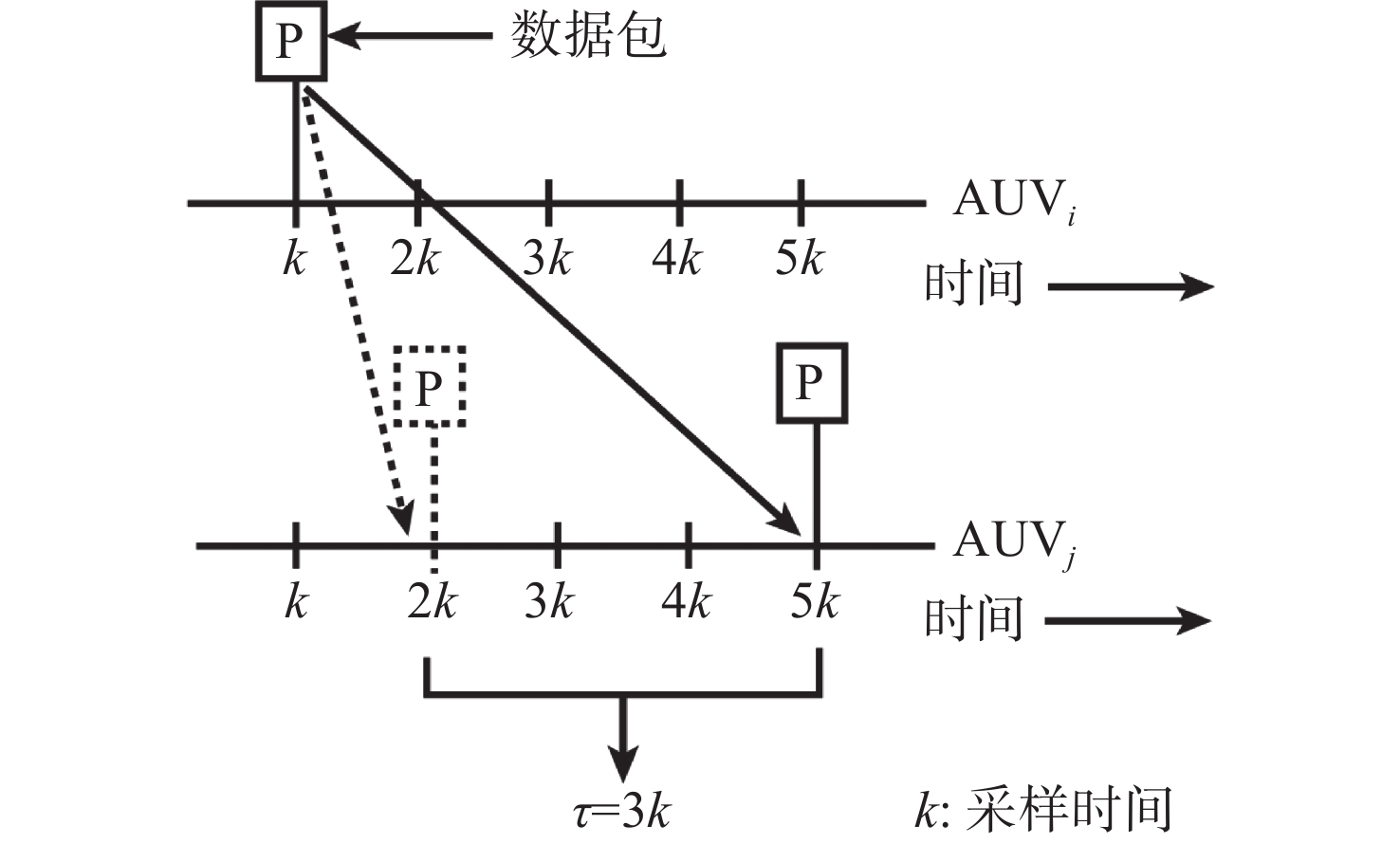
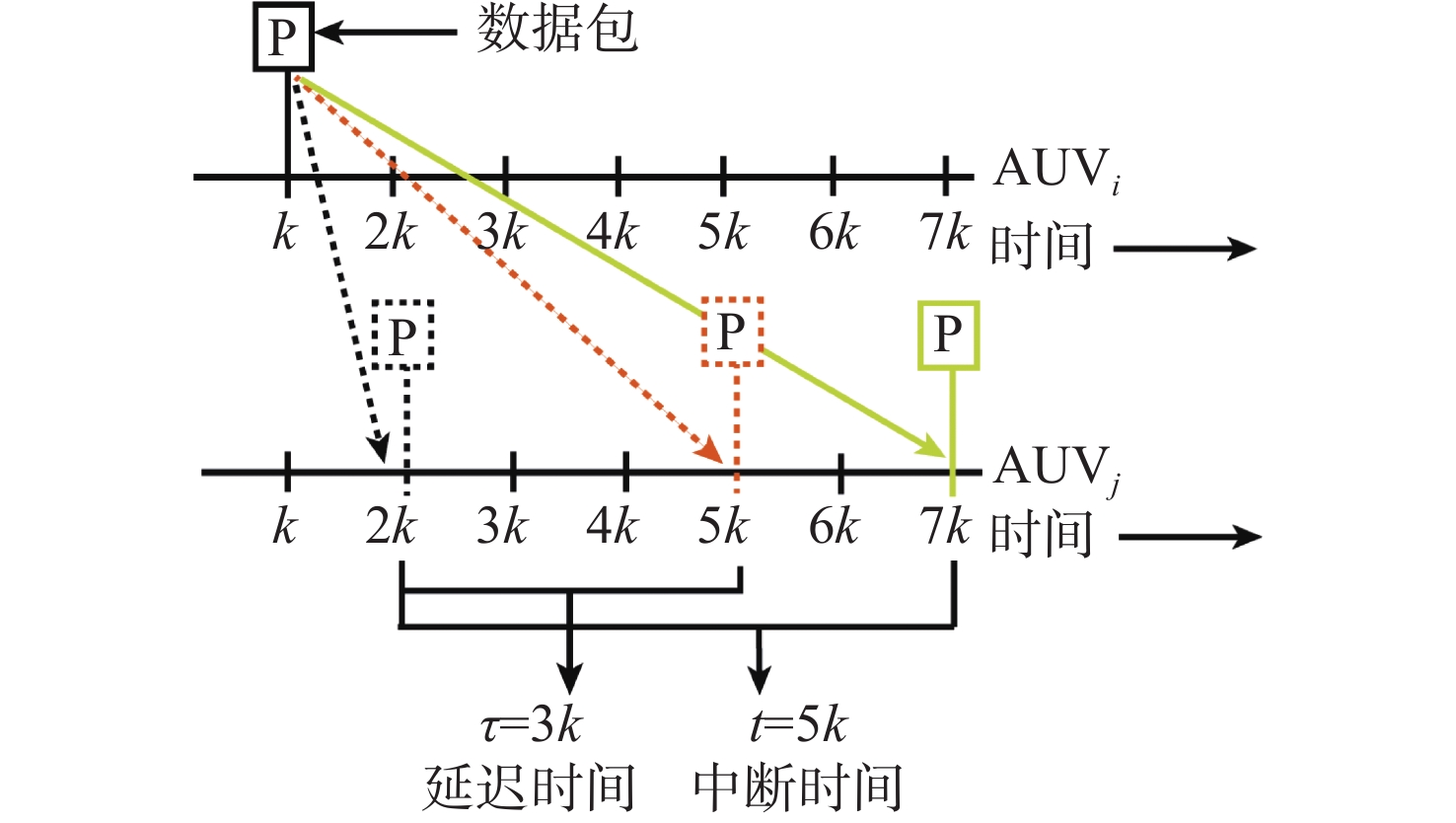
图 4 AUV编队通信定位时间延迟示意图
Figure 4. Diagram of time delay for AUV formation communication and positioning
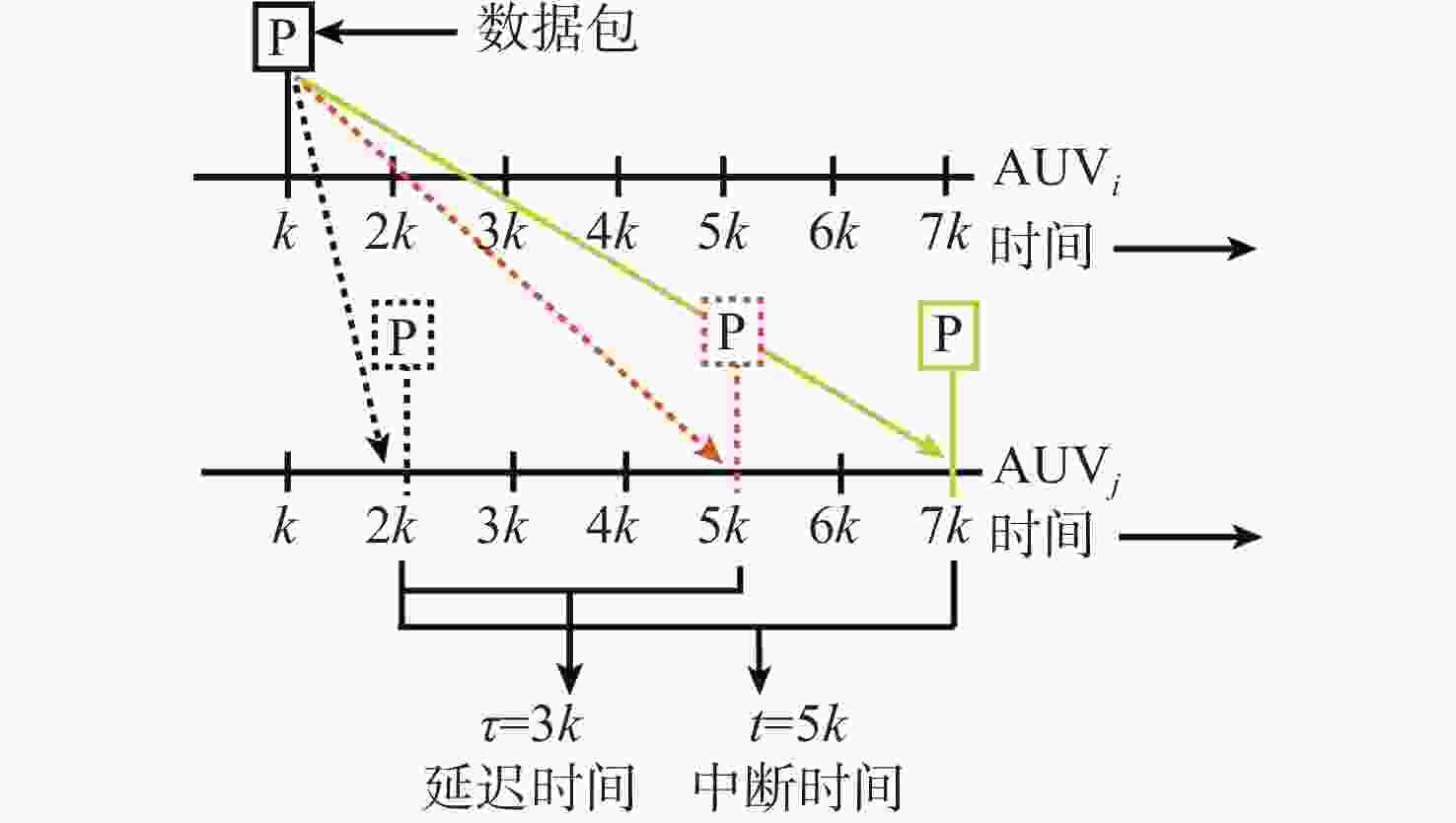
图 5 AUV编队通信定位中断示意图
Figure 5. Diagram of AUV formation communication and positioning interruption
表 1 AUV编队智能控制总结
Table 1. Summary of intelligent control of AUV formation
文献 通信定位方式 编队应用场景 问题特征 使用方法 验证形式 试验成果 [13] 光学通信定位 水下充电和信息交互、区域残骸探测、石油管道同步监测、珊瑚礁同步监测等 相对位姿难以准确测量 高斯拉普拉斯算子算法 2台AUV在湖中进行队形变换(对接)试验 最大的位置误差为9.818 mm [14] 相对位姿难以准确测量 卡尔曼滤波法 2台AUV在水池中进行队形变换(对接)试验 纵向位置误差趋于0 mm [16] 个体之间易碰撞 智能优化分配方法 在仿真环境中, 6台AUV在3 m的区域内作队形变换 无碰撞运动 [17] 个体之间易碰撞 Lennard-Jones势能法 保持队形的6条机器鱼在水箱中实现了半径为357 mm的同相位差圆周运动 无碰撞运动 [24~29] 声学通信定位 海底调查和测绘、资源勘探、水下考古勘探、水下救援等 时延信息可以获得 状态反馈法 在仿真环境中, 6台AUV在0.5 s的控制周期下进行队形保持和变换 系统可容忍0.4 s通信定位时延 [30] 时延信息可以获得 鲁棒控制法 在仿真环境中, 4台AUV在0.3 s的控制周期下进行队形保持和变换 系统可容忍0.6 s通信定位时延 [31] 时延信息可以获得 自适应控制法 在仿真环境中, 5台AUV在0.2 s的控制周期下进行队形保持和变换 系统可容忍5 s通信定位时延 [32] 时延信息可以获得 最优控制法 在仿真环境中, 5台AUV在0.2 s的控制周期下进行队形保持和变换 系统可容忍2 s通信定位时延 [33] 时延信息无法获得 梯度下降法 在水池中, 3台AUV在0.2 s的控制周期下进行队形保持和变换 系统可容忍5 s通信定位时延 [34] 时延信息无法获得 核密度方法估计法 在湖中, 3台AUV在5 s的控制周期下进行队形保持和变换 系统可容忍4 s通信定位时延 [34] 通信中断 曲线拟合法 在湖中, 3台AUV在5 s的控制周期下进行队形保持和变换 系统可容忍30%丢包率 [35] 通信中断 改进的广义预测控制法 在仿真环境中, AUV编队在0.1 s的控制周期下进行队形保持和变换 系统可容忍0.7 s通信定位中断 [36] 通信中断 改进的视线法 在湖中, 2台AUV在20 s的控制周期下进行队形保持和变换 系统可容忍3%的丢包率 [37] 通信中断 滑模控制器和观测器联合控制 在仿真环境中, 3台AUV在0.1 s的控制周期下进行队形保持和变换 系统可容忍0.6 s通信定位中断  下载: 导出CSV
下载: 导出CSV
-
[1] 钟宏伟, 李国良, 宋林桦, 等. 国外大型无人水下航行器发展综述[J]. 水下无人系统学报, 2018, 26(4): 273-282.Zhong Hong-wei, Li Guo-liang, Song Lin-hua, et al. Development of Large Displacement Unmanned Undersea Vehicle in Foreign Countries: a Review[J]. Journal of Unmanned Undersea Systems, 2018, 26(4): 273-282. [2] 徐玉如, 李彭超. 水下机器人发展趋势[J]. 自然杂志, 2011, 33(3): 125-132.Xu Yu-ru, Li Peng-chao. Developing Tendency of Unmanned Underwater Vehicles[J]. Chinese Journal of Nature, 2011, 33(3): 125-132. [3] Yuh J. Modeling and Control of Underwater Robotic Vehicles[J]. IEEE Transactions on Systems, Man, and Cybernetics, 1990, 20(6): 1475-1483. doi: 10.1109/21.61218 [4] 严浙平, 赵玉飞, 陈涛. 海洋勘测水下无人航行器的自主控制技术研究[J]. 哈尔滨工程大学学报, 2013, 34(9): 1152-1158. doi: 10.3969/j.issn.1006-7043.201303017Yan Zhe-ping, Zhao Yu-fei, Chen Tao. Research on Auto- nomous Control of Unmanned Underwater Vehicle for Oce- anographic Survey[J]. Journal of Harbin Engineering University, 2013, 34(9): 1152-1158. doi: 10.3969/j.issn.1006-7043.201303017 [5] Li X, Zhu D. An Adaptive SOM Neural Network Method for Distributed Formation Control of a Group of AUVs[J]. IEEE Transactions on Industrial Electronics, 2018, 65(10): 8260-8270. [6] Sahu B K, Subudhi B. Flocking Control of Multiple AUVs Based on Fuzzy Potential Functions[J]. IEEE Transactions on Fuzzy Systems, 2017, 26(5): 2539-2551. [7] 刘祥玲. 复杂环境下无人潜航器编队协调控制方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2019. [8] Antsaklis P J. Intelligent Control[J]. Encyclopedia of Electrical and Electronics Engineering, 1997, 10: 493-503. [9] 蔡文郁, 杨俊雷, 官靖凯. 基于反步控制的多AUV编队控制方法研究[J]. 传感技术学报, 2021, 34(6): 778-783. doi: 10.3969/j.issn.1004-1699.2021.06.010Cai Wen-yu, Yang Jun-lei, Guan Jing-kai. Research on Multiple AUV Formation Control Algorithm Based on BackStepping Control[J]. Chinese Journal of Sensors and Actuators, 2021, 34(6): 778-783. doi: 10.3969/j.issn.1004-1699.2021.06.010 [10] 王佳丽, 曹翔. 基于生物启发反步级联控制方法的多AUV主从式编队[J]. 淮阴师范学院学报(自然科学版), 2018, 17(1): 22-26.Wang Jia-li, Cao Xiang. Leader-follower Formation Control Method for Multi-AUV Based on Bio-inspired Neural Network and Backstepping Control[J]. Journal of Huaiyin Tea- chers College(Natural Science Edition), 2018, 17(1): 22-26. [11] Lewis M A, Tan K H. High Precision Formation Control of Mobile Robots Using Virtual Structures[J]. Autonomous robots, 1997, 4(4): 387-403. doi: 10.1023/A:1008814708459 [12] 陈世健, 陈宏, 丁贺, 等. 多AUV编队控制[J]. 机械制造与自动化, 2021, 50(6): 151-154.Chen Shi-jian, Chen Hong, Ding He, et al. Multi-AUV Formation Control[J]. Machine Building & Automation, 2021, 50(6): 151-154. [13] Liu S, Xu H, Lin Y, et al. Visual Navigation for Recovering an AUV by Another AUV in Shallow Water[J]. Sensors, 2019, 19(8): 1889. doi: 10.3390/s19081889 [14] Zhang Y, Gao J, Chen Y, et al. Adaptive Neural Network Control for Visual Docking of an Autonomous Underwater Vehicle Using Command Filtered Backstepping[J]. International Journal of Robust and Nonlinear Control, 2022, 32(8): 4716-4738. doi: 10.1002/rnc.6051 [15] Filaretov V, Yukhimets D. Formation Control of AUV on the Base of Visual Tracking of AUV-Leader[C]//2021 International Russian Automation Conference. Sochi, Russian Federation: IEEE, 2021: 868-874. [16] Wang X, Zerr B, Thomas H, et al. Pattern Formation for a Fleet of AUVs Based on Optical Sensor[C]//Oceans. Aberdeen: IEEE, 2017: 1-9. [17] Berlinger F, Gauci M, Nagpal R. Implicit Coordination for 3D Underwater Collective Behaviors in a Fish-Inspired Robot Swarm[J]. Science Robotics, 2021, 6(50): eabd8668. doi: 10.1126/scirobotics.abd8668 [18] Stojanovic M. Recent Advances in High-Speed Underwater Acoustic Communications[J]. IEEE Journal of Oceanic Engineering, 1996, 21(2): 125-136. doi: 10.1109/48.486787 [19] Chitre M, Shahabudeen S, Stojanovic M. Underwater Acoustic Communications and Networking: Recent Advances and Future Challenges[J]. Marine Technology Society Journal, 2008, 42(1): 103. doi: 10.4031/002533208786861263 [20] Yang G, Dai L, Wei Z. Challenges, Threats, Security Issues and New Trends of Underwater Wireless Sensor Networks[J]. Sensors, 2018, 18(11): 3907. doi: 10.3390/s18113907 [21] Caiti A, Crisostomi E, Munafò A. Physical Characterization of Acoustic Communication Channel Properties in Underwater Mobile Sensor Networks[C]//International Conference on Sensor Systems and Software. Berlin, Heidelberg: Springer, 2009: 111-126. [22] Yang H, Wang C, Zhang F. A Decoupled Controller Design Approach for Formation Control of Autonomous Underwater Vehicles with Time Delays[J]. IET Control Theory & Applications, 2013, 7(15): 1950-1958. [23] Yang H, Wang C, Zhang F. Robust Geometric Formation Control of Multiple Autonomous Underwater Vehicles with Time Delays[C]//2013 American Control Conference. Washington, D.C.: IEEE, 2013: 1380-1385. [24] Yan Z, Liu Y, Yu C, et al. Leader-following Coordination of Multiple UUVs Formation under Two Independent Topologies and Time-Varying Delays[J]. Journal of Central South University, 2017, 24(2): 382-393. doi: 10.1007/s11771-017-3440-x [25] Yan Z, Yang Z, Yue L, et al. Discrete-time Coordinated Control of Leader-Following Multiple AUVs under Switching Topologies and Communication Delays[J]. Ocean Engineering, 2019, 172: 361-372. doi: 10.1016/j.oceaneng.2018.12.018 [26] Zhang W, Zeng J, Yan Z, et al. Consensus Control of Multiple AUVs Recovery System under Switching Topologies and Time Delays[J]. IEEE Access, 2019, 7: 119965-119980. doi: 10.1109/ACCESS.2019.2935104 [27] Yan Z, Xu D, Chen T, et al. Leader-follower Formation Control of UUVs with Model Uncertainties, Current Disturbances, and Unstable Communication[J]. Sensors, 2018, 18(2): 662. doi: 10.3390/s18020662 [28] Yan Z, Pan X, Yang Z, et al. Formation Control of Leader-Following Multi-UUVs with Uncertain Factors and Time-Varying Delays[J]. IEEE Access, 2019, 7: 118792-118805. doi: 10.1109/ACCESS.2019.2935067 [29] Yan Z, Zhang C, Tian W, et al. Formation Trajectory Tracking Control of Discrete-Time Multi-AUV in a Weak Communication Environment[J]. Ocean Engineering, 2022, 245: 110495. doi: 10.1016/j.oceaneng.2021.110495 [30] Millán P, Orihuela L, Jurado I, et al. Formation Control of Autonomous Underwater Vehicles Subject to Communication Delays[J]. IEEE Transactions on Control Systems Technology, 2013, 22(2): 770-777. [31] Suryendu C, Subudhi B. Modified Constrained Adaptive Formation Control Scheme for Autonomous Underwater Vehicles under Communication Delays[J]. IET Cyber-Systems and Robotics, 2020, 2(1): 22-30. doi: 10.1049/iet-csr.2019.0027 [32] Du J, Li J, Lewis F L. Distributed 3D Time-Varying Formation Control of Underactuated AUVs with Communication Delays Based on Data-Driven State Predictor[J]. IEEE Transactions on Industrial Informatics(Early Access). [2022-07-28]. https://ieeexplore.ieee.org/abstract/document/9844297. [33] Suryendu C, Subudhi B. Formation Control of Multiple Autonomous Underwater Vehicles under Communication Delays[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2020, 67(12): 3182-3186. doi: 10.1109/TCSII.2020.2976955 [34] Li L, Li Y, Zhang Y, et al. Formation Control of Multiple Autonomous Underwater Vehicles under Communication Delay, Packet Discreteness and Dropout[J]. Journal of Marine Science and Engineering, 2022, 10(7): 920. doi: 10.3390/jmse10070920 [35] Li J, Liu B, Shi A. Improved Generalized Predictive Control Using Grey Prediction for Internet-Based Autonomous Underwater Vehicle[C]//2016 35th Chinese Control Conference. Chengdu, China: IEEE, 2016: 7474-7478. [36] Xu H, Li G. Multi-AUVs Formation Control with Acoustic Communication Constraints[C]//2013 Oceans. San Diego: IEEE, 2013: 1-6. [37] Das B, Subudhi B, Pati B B. Employing Nonlinear Observer for Formation Control of AUVs under Communication Constraints[J]. International Journal of Intelligent Unmanned Systems, 2015, 3(2/3): 122-155. doi: 10.1108/IJIUS-04-2015-0004 [38] Yan Z, Yang Z, Pan X, et al. Virtual Leader Based Path Tracking Control for Multi-UUV Considering Sampled-Data Delays and Packet Losses[J]. Ocean Engineering, 2020, 216: 108065. doi: 10.1016/j.oceaneng.2020.108065 [39] Schmickl T, Thenius R, Moslinger C, et al. CoCoRo-The Self-Aware Underwater Swarm[C]//2011 Fifth IEEE Conference on Self-Adaptive and Self-Organizing Systems Workshops. Ann Arbor, MI, USA: IEEE, 2011: 120-126. [40] Hu Z, Ma C, Zhang L, et al. Formation Control of Impulsive Networked Autonomous Underwater Vehicles Under Fixed and Switching Topologies[J]. Neurocomputing, 2015, 147: 291-298. doi: 10.1016/j.neucom.2014.06.060 [41] Wang H, Liu L, Wang D, et al. Output-feedback Control for Cooperative Diving of Saucer-Type Underwater Gliders Based on a Fuzzy Observer and Event-Triggered Communication[J]. IEEE Access, 2019, 7: 50453-50465. doi: 10.1109/ACCESS.2019.2911194 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 3471
- HTML全文浏览量: 377
- PDF下载量: 331
- 被引次数: 0
图(5) / 表(1)




