A Track Initiation Method Based on Multiple Accumulation of Active Sonar Images
-
摘要: 为满足强混响背景下水下运动目标自主检测要求, 针对主动声呐回波信号空时处理后数据量庞大的问题, 提出了一种基于主动声呐图像多重累积的航迹起始算法。首先, 构建主动声呐强混响背景下水下多目标航迹起始模型。通过声呐图像的择大累计, 将距离-方位-帧时间三维声呐图像压缩成距离-方位二维声呐图像, 并保留了累积帧信息。通过质心聚类点迹提取的方法, 获取目标量测信息和能量信息, 完成数据预处理。其次, 对Hough变换的参数空间进行能量累积, 并通过局部峰值检测的方法得到多目标初始航迹。最后, 为提高航迹准确率, 利用速度约束和航迹合并方法, 剔除了混响及合并重复航迹。仿真结果表明, 与常规的目标跟踪方法相比, 该算法有效降低了航迹起始过程中声呐图像的数据量, 在强混响背景下仍能以高检测概率实现水下多目标自主检测。Abstract: To meet the requirements of autonomous detection of underwater moving targets in a strong reverberation background, a track initiation algorithm based on multiple accumulations of active sonar images was proposed to solve the problem of large amounts of data after space-time processing of active sonar echo signals. Firstly, the underwater multi-target track initiation model in the strong reverberation background of the active sonar was constructed. The range-azimuth-frame time three-dimensional sonar image was condensed into the range-azimuth two-dimensional sonar image by selecting the largest data of sonar images, and the accumulated frame information was retained. The measurement information and energy information of the target were obtained through the centroid clustering point extraction method, and the data preprocessing was completed. Secondly, the energy was accumulated in the parameter space of the Hough transform, and the initial track of multiple targets was obtained by the method of local peak detection. Finally, in order to improve the accuracy of the track, the reverberation and duplicate tracks were eliminated by using the velocity constraint and track merging method. The simulation results show that compared with conventional target tracking methods, this algorithm can effectively reduce the amount of sonar image data in the course of track initiation and can still achieve autonomous detection of underwater multiple targets with high detection probability in a strong reverberation background.
-
Key words:
- underwater multi-targets /
- active sonar /
- track before detection /
- Hough transform /
- track initiation
-

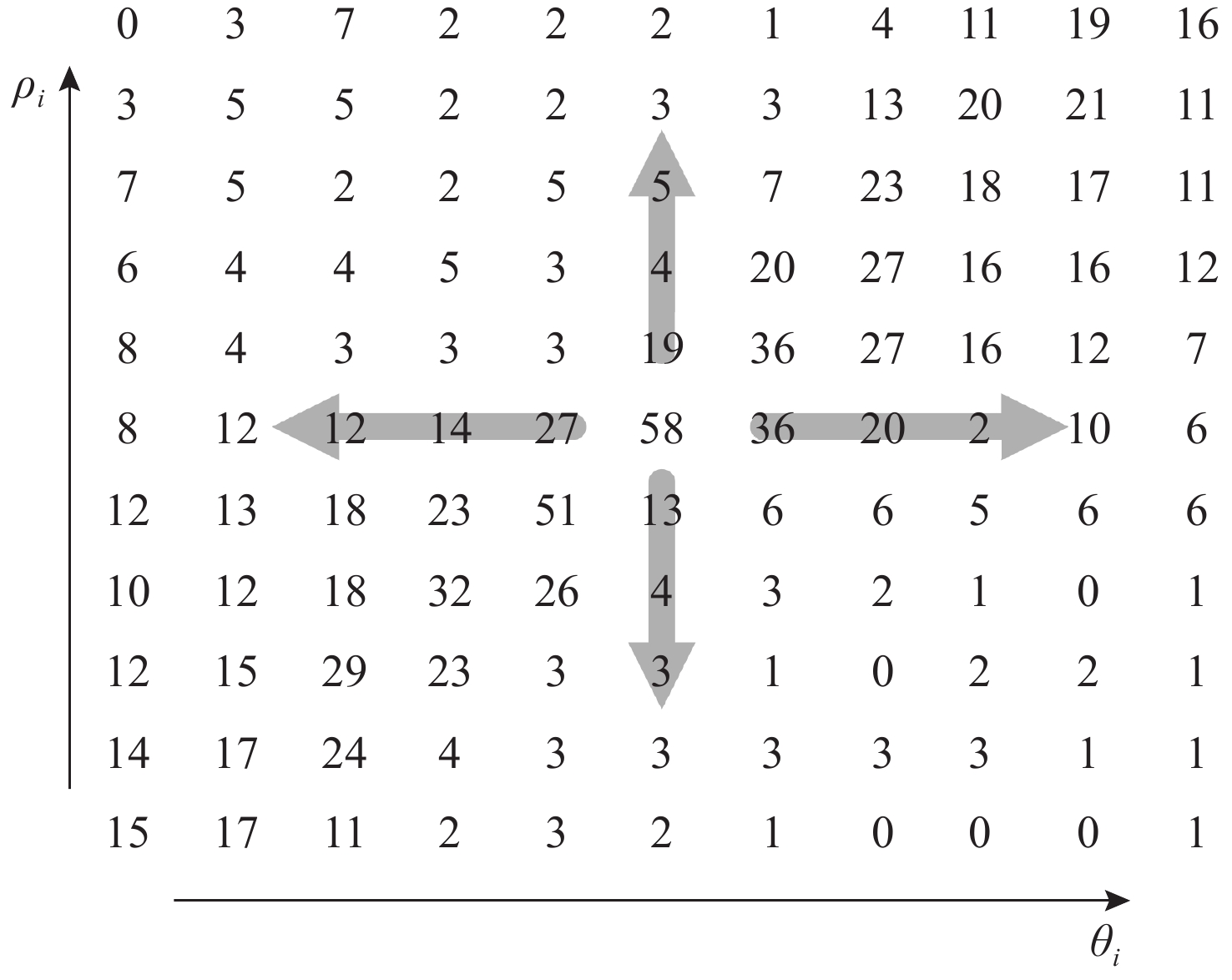
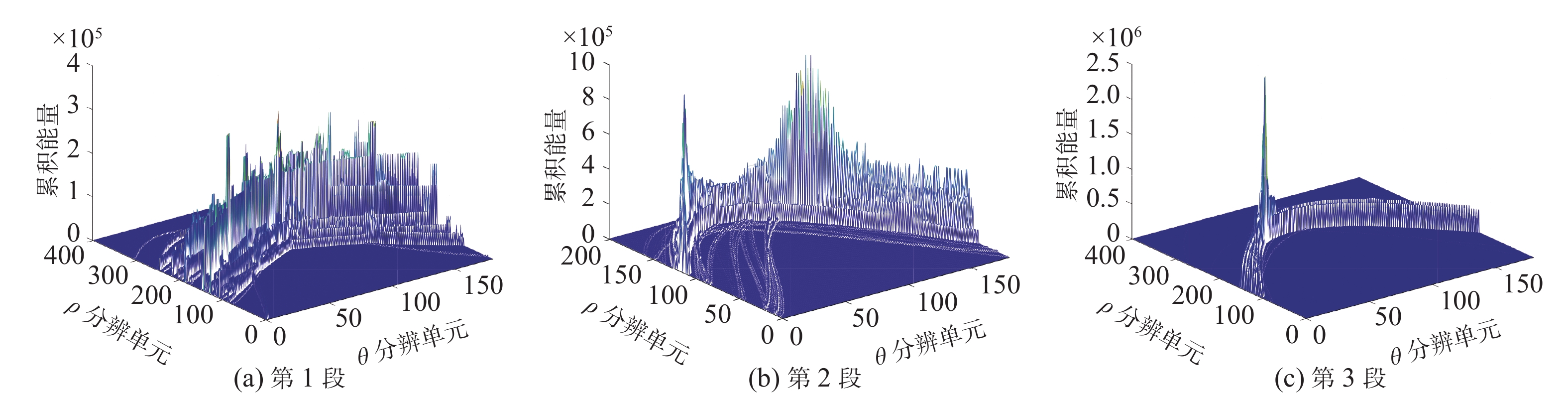
图 3 具有噪声分布的声呐图像参数空间累积图(局部)
Figure 3. Spatial accumulation map of sonar image parameters with noise distribution(local)

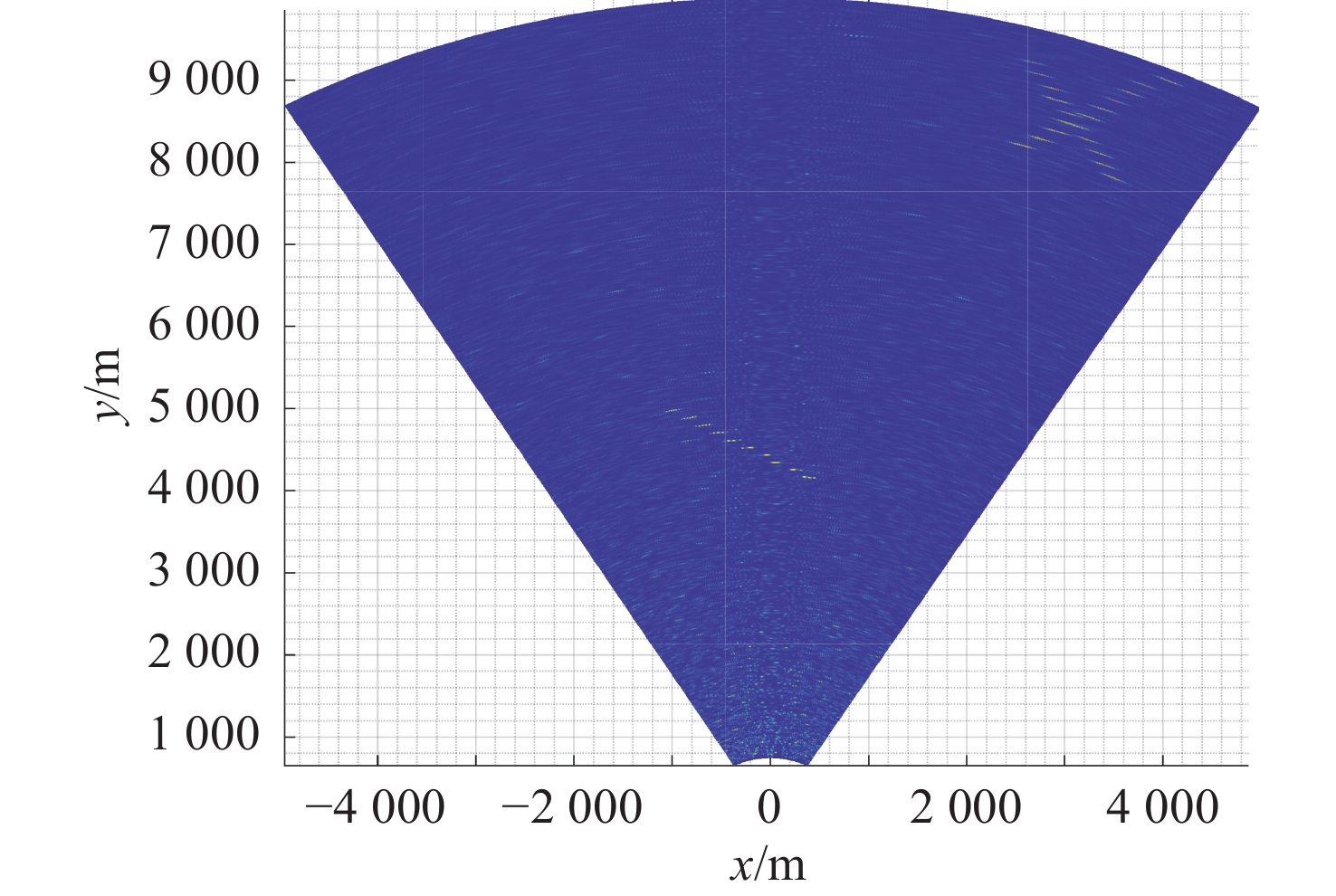
图 4 10次择大累积后声呐序列图像
Figure 4. Sonar sequence image after maximum accumulation of 10 times

图 5 10次择大累积后量测数据点分布
Figure 5. Distribution of measurement data points after maximum accumulation of 10 times

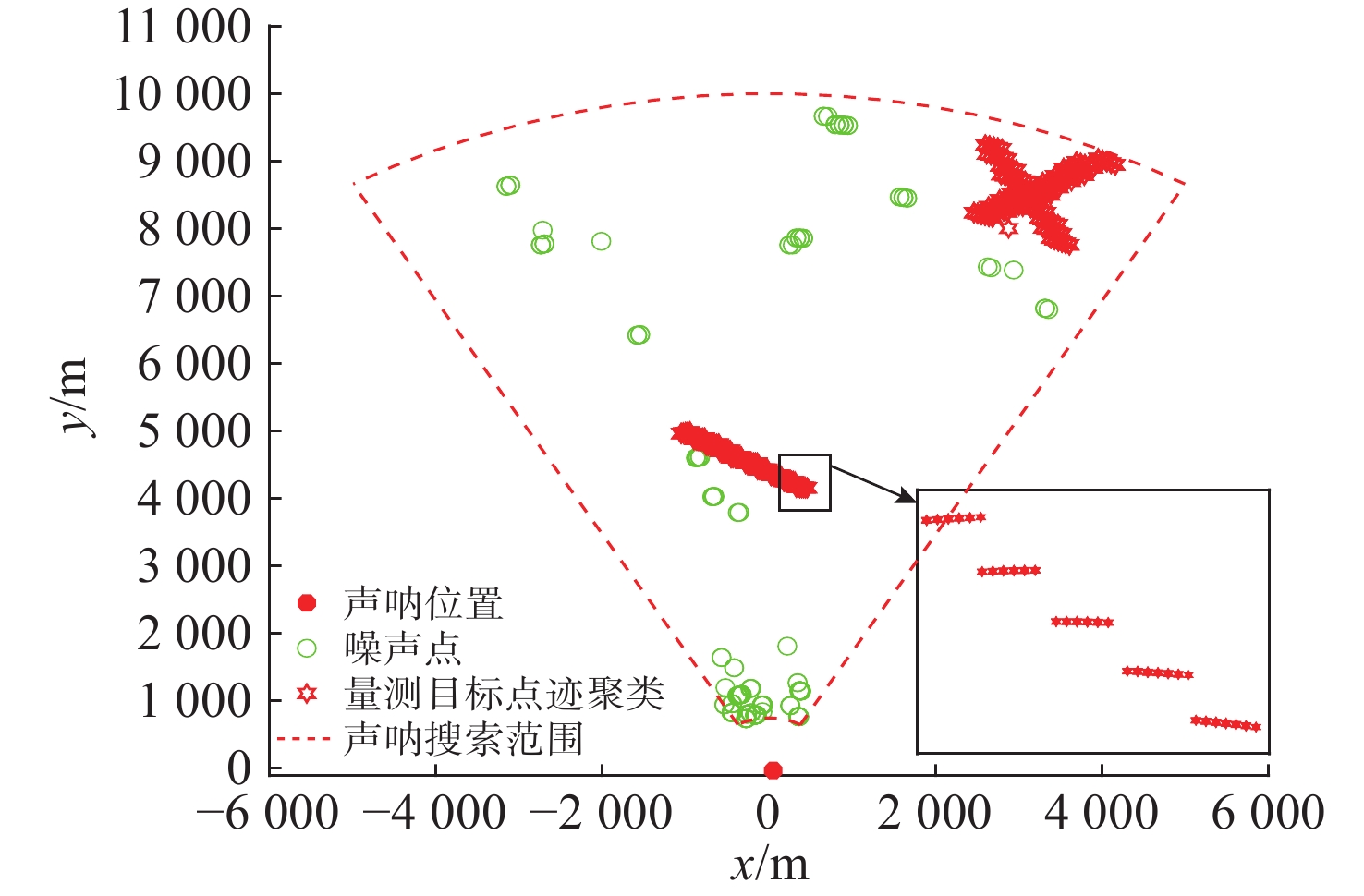
图 6 质心聚类后量测数据点分布
Figure 6. Distribution of measurement data points after centroid clustering
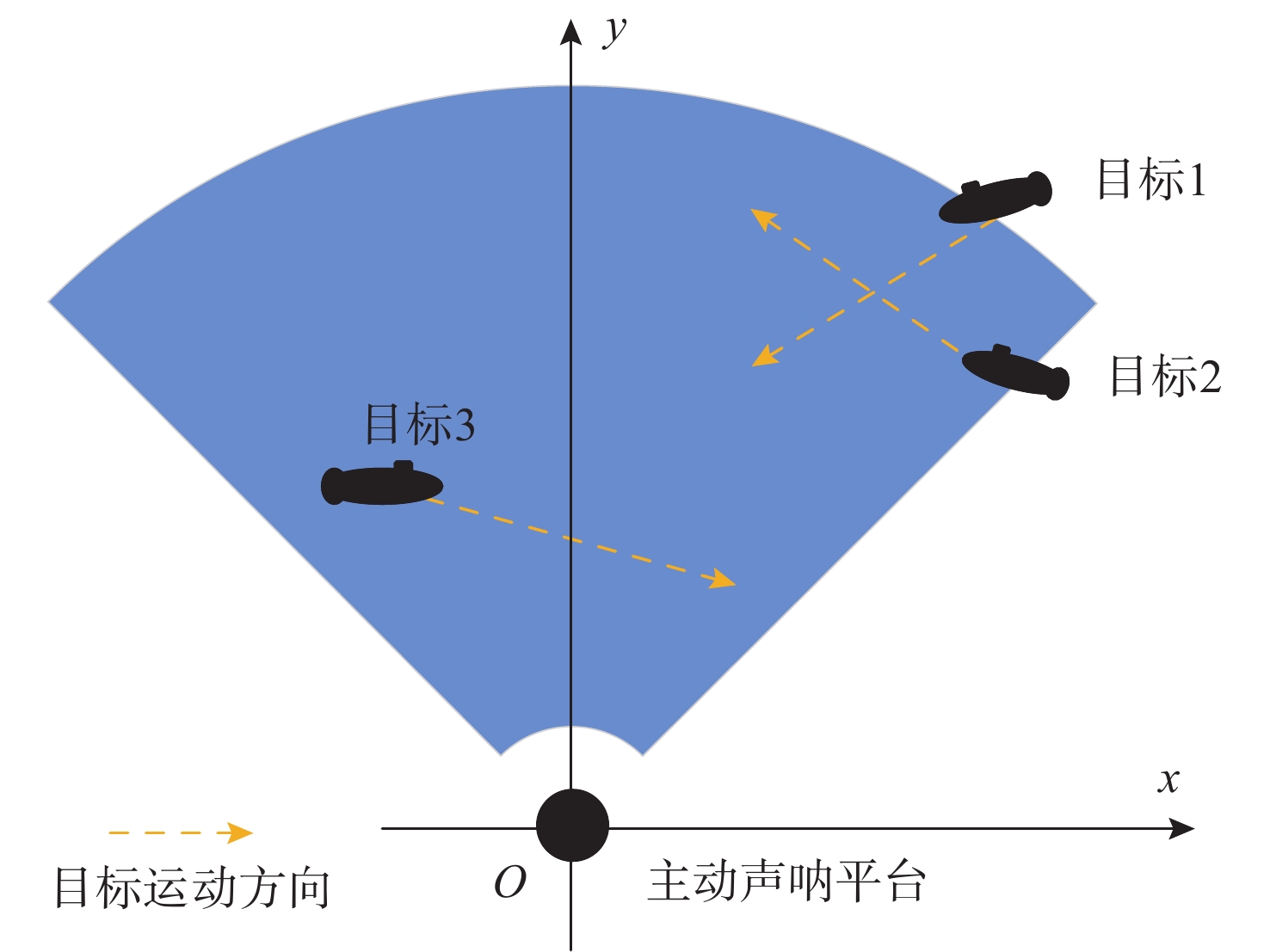
表 1 目标运动参数
Table 1. Motion parameters of targets
编号 起始位置/km 航向(与x轴夹角)/(°) 信噪比
/dB目标1 (4, 9) 210 −15 ~ −13 目标2 (3.5, 7.8) 120 −13 ~ −15 目标3 (−1, 5) −30 −10 ~ −8  下载: 导出CSV
下载: 导出CSV
-
[1] 周武, 张宏滔. 水下无人航行器自主检测方法研究[J]. 声学技术, 2020, 39(2): 146-150.Zhou Wu, Zhang Hongtao. Research on UUV autonomous detection method[J]. Technical Acoustics, 2020, 39(2): 146-150. [2] 任宇飞, 吴玉泉, 李宇, 等. 水下无人航行器主动目标自动检测方法研究[J]. 船舶力学, 2019, 23(2): 227-233.Ren Yufei, Wu Yuquan, Li Yu, et al. Research on an unmanned underwater vehicle autonomous active target detection method[J]. Journal of Ship Mechanics, 2019, 23(2): 227-233. [3] 何友, 修建娟, 关欣, 等. 雷达数据处理及应用[M]. 北京: 电子工业出版社, 2013. [4] 薛俊杰, 陈剑, 徐恒, 等. 复杂环境下基于序列Hough变换和逻辑法的航迹起始方法[J]. 无线电工程, 2022, 52(4): 624-629.Xue Junjie, Chen Jian, Xu Heng, et al. Track initiation approach based on sequence Hough transform and logic algorithm in complex environment[J]. Radio Engineering, 2022, 52(4): 624-629. [5] 张路蔚, 王嘉玮, 郑佳, 等. 基于Hough变换的声呐目标曲线轨迹的提取[J]. 声学与电子工程, 2018(1): 38-41.Zhang Luwei, Wang Jiawei, Zheng Jia, et al. Extraction of sonar target curve trajectory based on Hough transform[J]. Acoustics and Electronic Engineering, 2018(1): 38-41. [6] 孙宇嘉, 于纪言, 王晓鸣. 适用于复杂场景的多目标跟踪算法[J]. 仪器仪表学报, 2019, 40(3): 126-137.Sun Yujia, Yu Jiyan, Wang Xiaoming. Multiple object tracking algorithm for the complex scenario[J]. Chinese Journal of Scientific Instrument, 2019, 40(3): 126-137. [7] Zhang J, Zeng Q, Zhu Z, et al. Sonar target recognition research based on AUV[C]//2018 37th Chinese Control Conference (CCC). Wuhan, China: IEEE, 2018. [8] 张雨, 陈熙源, 朱敏, 等. 基于斜率约束和回溯搜索的水下多目标跟踪方法[J]. 仪器仪表学报, 2021, 42(9): 81-88.Zhang Yu, Chen Xiyuan, Zhu Min, et al. A multi-target passive tracking method based on slope constraint and retrospective searching[J]. Chinese Journal of Scientific Instrument, 2021, 42(9): 81-88. [9] Wang Q, Du S, Wang F, et al. Underwater target recognition method based on multi-domain active sonar echo images[C]//2021 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC). Xi’an, China: IEEE, 2021. [10] Benoudnine H, Meche A, Keche M, et al. Real time Hough transform based track initiators in clutter[J]. Information Sciences, 2016, 337-338: 82-92. [11] 滕婷婷. 基于共址MIMO图像声呐的水下运动小目标检测跟踪技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2014. [12] Wang J, Jiao J S. Track before detect for low frequency active towed array sonar[C]//2019 IEEE International Conference on Signal, Information and Data Processing (ICSIDP). Chongqing, China: IEEE, 2019. [13] 李子高, 李淑秋, 闻疏琳. 基于无人平台的水下目标自动检测方法[J]. 哈尔滨工程大学学报, 2017, 38(1): 103-108.Li Zigao, Li Shuqiu, Wen Shulin. Automatic detection of an underwater target based on UUV[J]. Journal of Harbin Engineering University, 2017, 38(1): 103-108. [14] 贺玉梁. 运动小平台主动声呐目标回波信号检测技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2020. [15] 金盛龙, 李宇, 黄海宁. 水下多目标方位的联合检测与跟踪[J]. 声学学报, 2019, 44(4): 503-512.Jin Shenglong, Li Yu, Huang Haining. A unified method for underwater multi-target bearing detection and tracking[J]. Acta Acustica, 2019, 44(4): 503-512. [16] Xu Z Z, Shin B S. A statistical method for peak localization in Hough space by analysing butterflies[C]//Image and Video Technology. Berlin, Heidelberg: Springer Berlin Heidelberg, 2014. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 385
- HTML全文浏览量: 159
- PDF下载量: 78
- 被引次数: 0