SINS/DVL/USBL Navigation Algorithm Based on Tight Integration
-
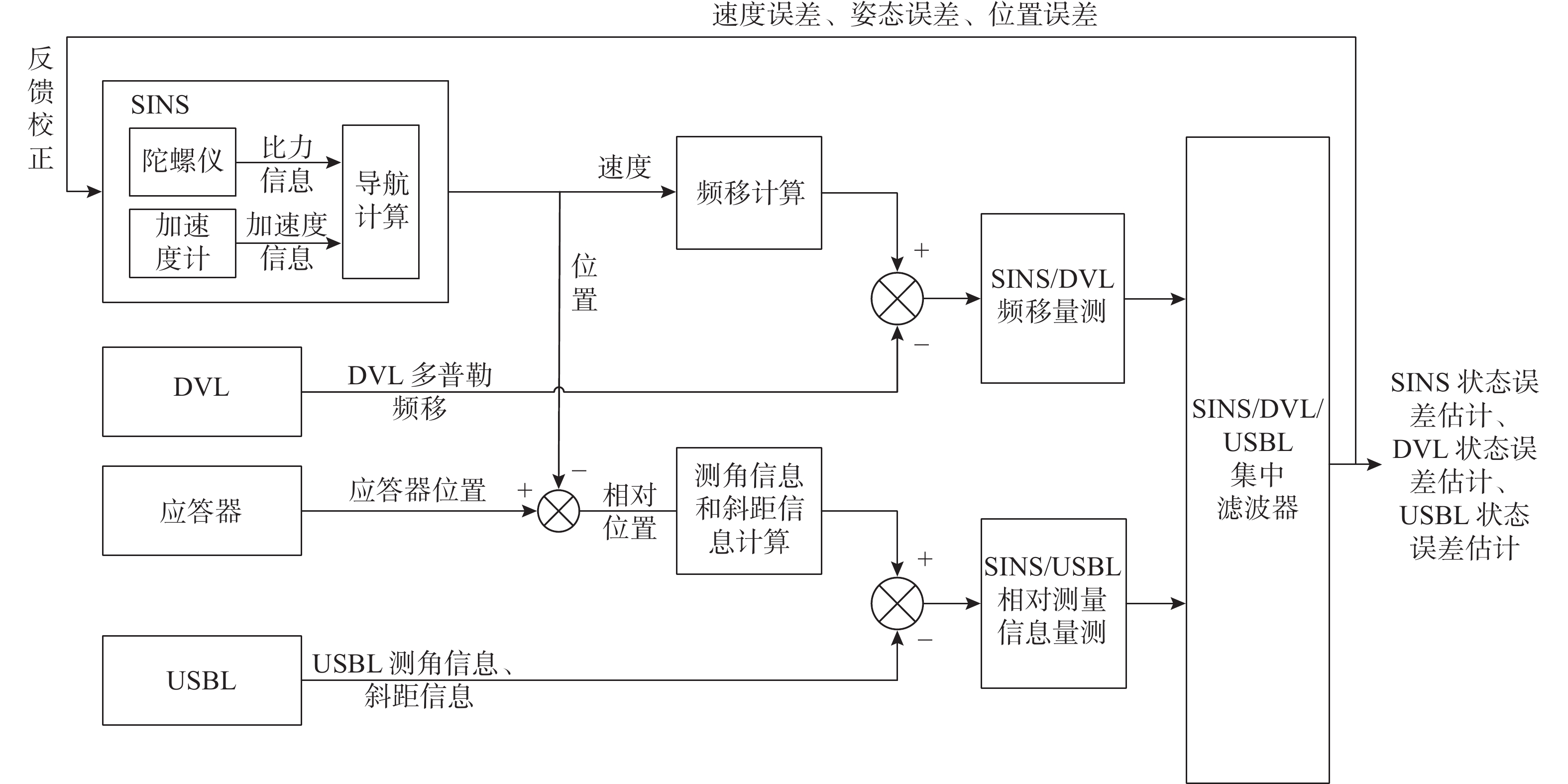
摘要: 针对自主水下航行器在水下复杂环境下对于高精度、高可靠性的导航定位需求, 提出了一种捷联式惯导系统(SINS)/多普勒测速仪(DVL)/超短基线(USBL)定位系统紧组合导航算法, 构建了基于频移量测的SINS/DVL紧组合量测方程和基于相对测量信息量测的SINS/USBL紧组合量测方程, 通过集中卡尔曼滤波的方法, 对SINS、DVL和USBL的信息进行融合处理。针对水下复杂环境造成导航精度下降的问题, 充分考虑DVL和USBL的数据野值情况, 利用卡方检验法进行判断后对故障数据隔断处理, 实时更新量测方程维数, 保证系统精度。仿真验证可知, 该算法对比其他不同组合模型算法具有较高的定位精度, 对比传统的基于速度量测和相对位置量测的SINS/DVL/USBL集中滤波方法精度可提升约23%; 在DVL数据失效时, 定位误差较正常情况仅增长5.2%; 在USBL数据失效时, 定位误差较正常情况增长165.4%, 鲁棒性和稳定性显著优于基于其他量测的SINS/DVL/USBL的集中滤波导航算法, 可实现高精度和高可靠性的水下导航定位。Abstract: For autonomous undersea vehicle’s requirement of high-precision and high-reliability navigation and positioning in complex underwater environments, a tightly integrated navigation algorithm involving strapdown inertial navigation system(SINS)/Doppler velocity log(DVL)/ultra-short baseline(USBL) positioning system was proposed. A SINS/DVL tightly integrated measurement equation based on frequency shift measurement and a SINS/USBL tightly integrated measurement equation based on relative measurement information were established. SINS, DVL, and USBL information were fused using a concentrated Kalman filter. In view of the decline of navigation accuracy caused by the complex underwater environment, the DVL and USBL data outliers were fully considered, and the fault data were detected and isolated by Chi-square detection. In addition, the measurement equation dimensions were updated in real time to ensure the precision of the system. The simulation results show that the proposed algorithm has higher positioning precision than other integrated model algorithms. Compared with the traditional SINS/DVL/USBL concentrated filtering method based on velocity measurement and relative position measurement, the precision can be improved by about 23%. In the case of DVL data failure, the positioning error only increases by 5.2% compared with the normal condition. In the case of USBL data failure, the positioning error increases by 165.4% compared with the normal condition, and the robustness and stability are significantly better than the SINS/DVL/USBL concentrated filtering navigation algorithm based on other measurements. Therefore, it can achieve high-precision and high-reliability underwater navigation and positioning.
-

图 1 SINS/DVL/USBL组合导航系统结构图
Figure 1. SINS/DVL/USBL integrated navigation system structrue

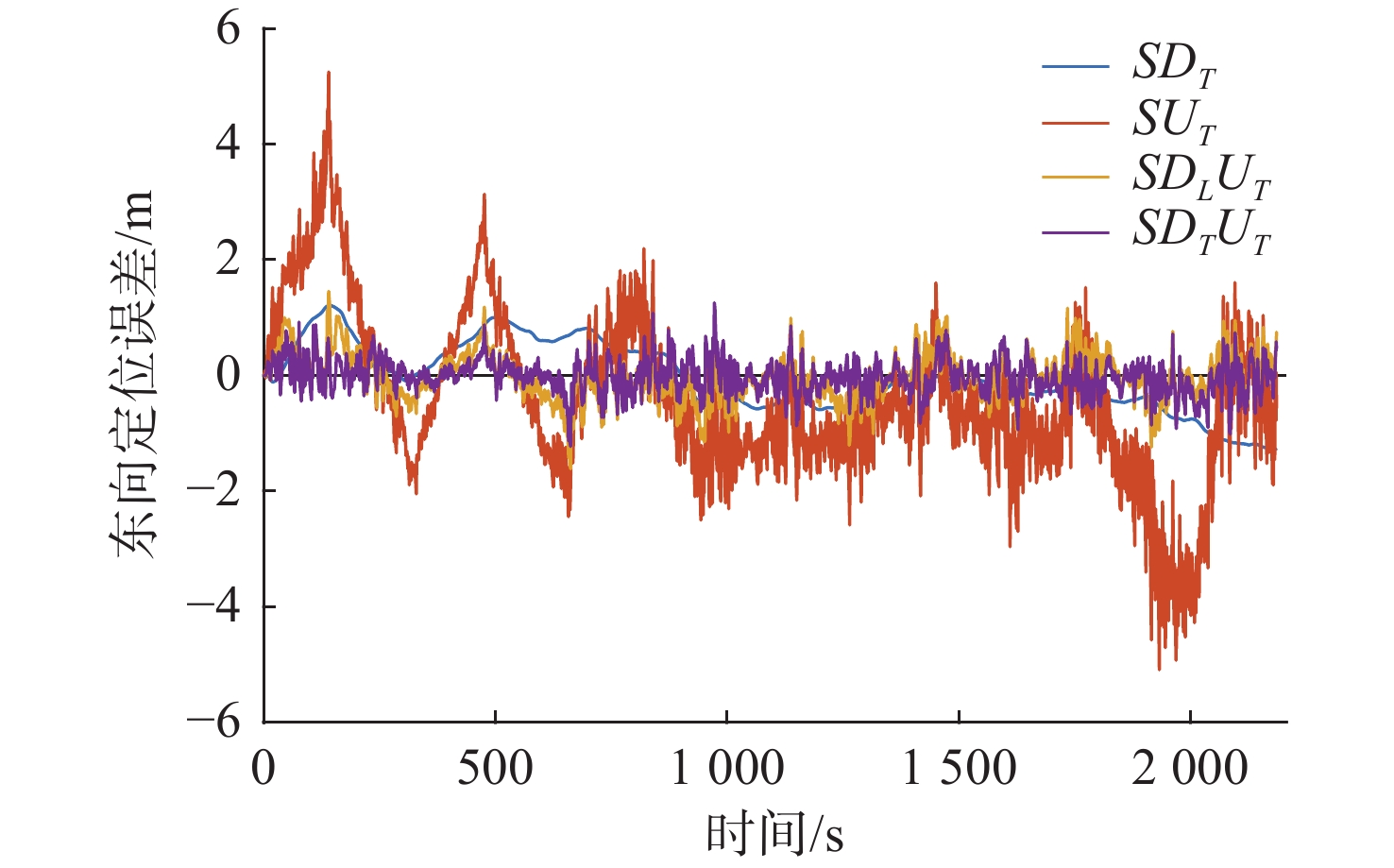
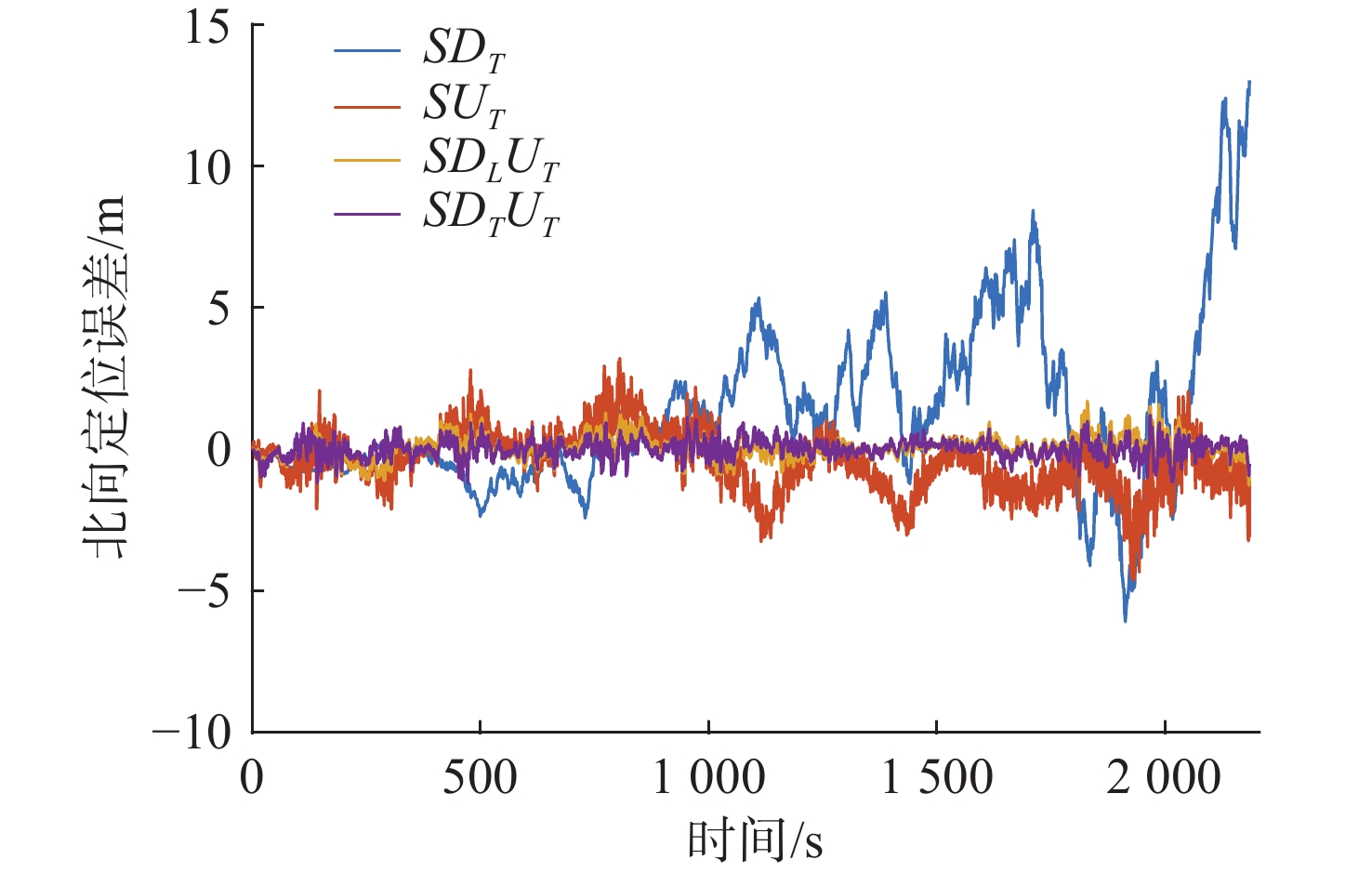
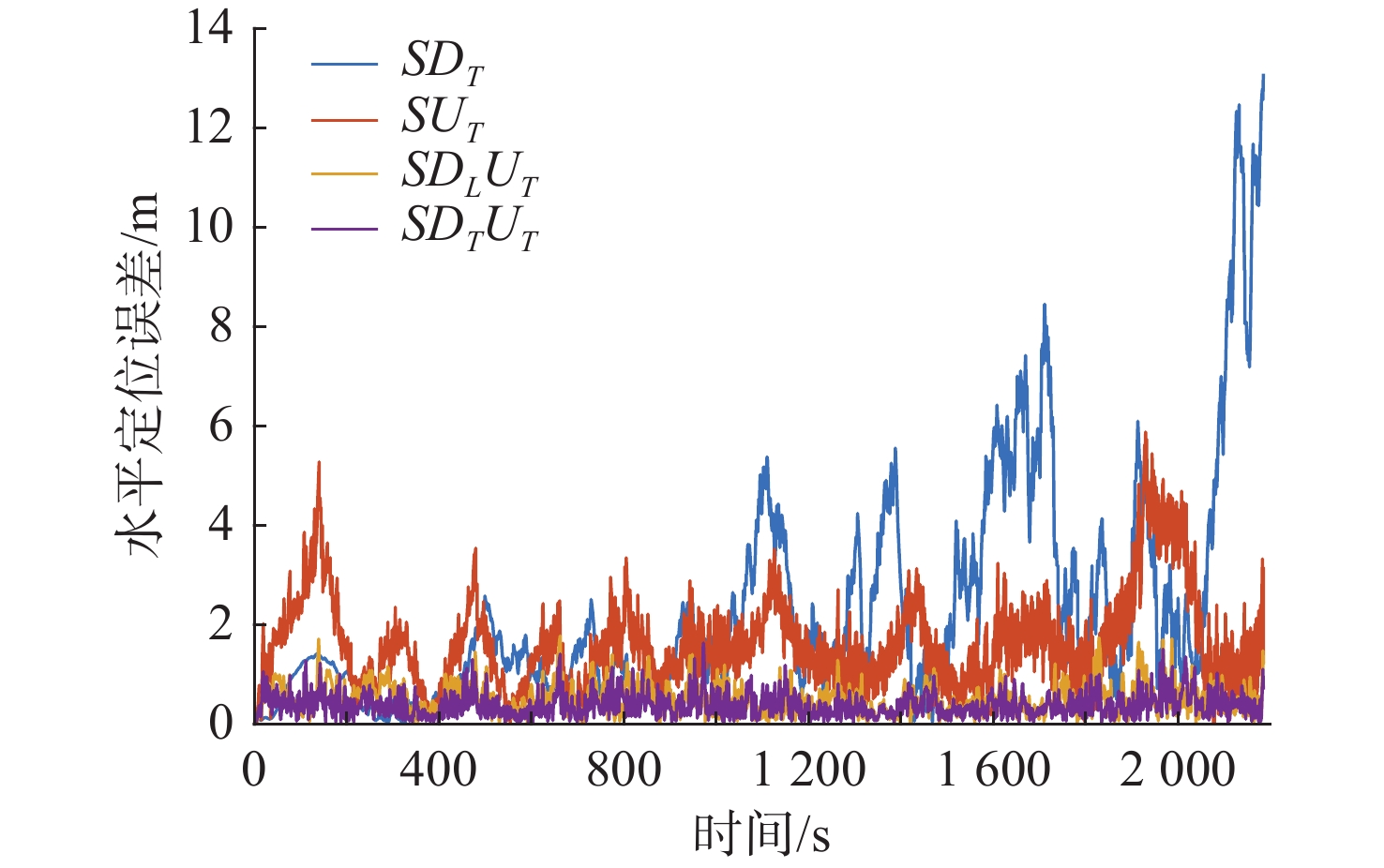
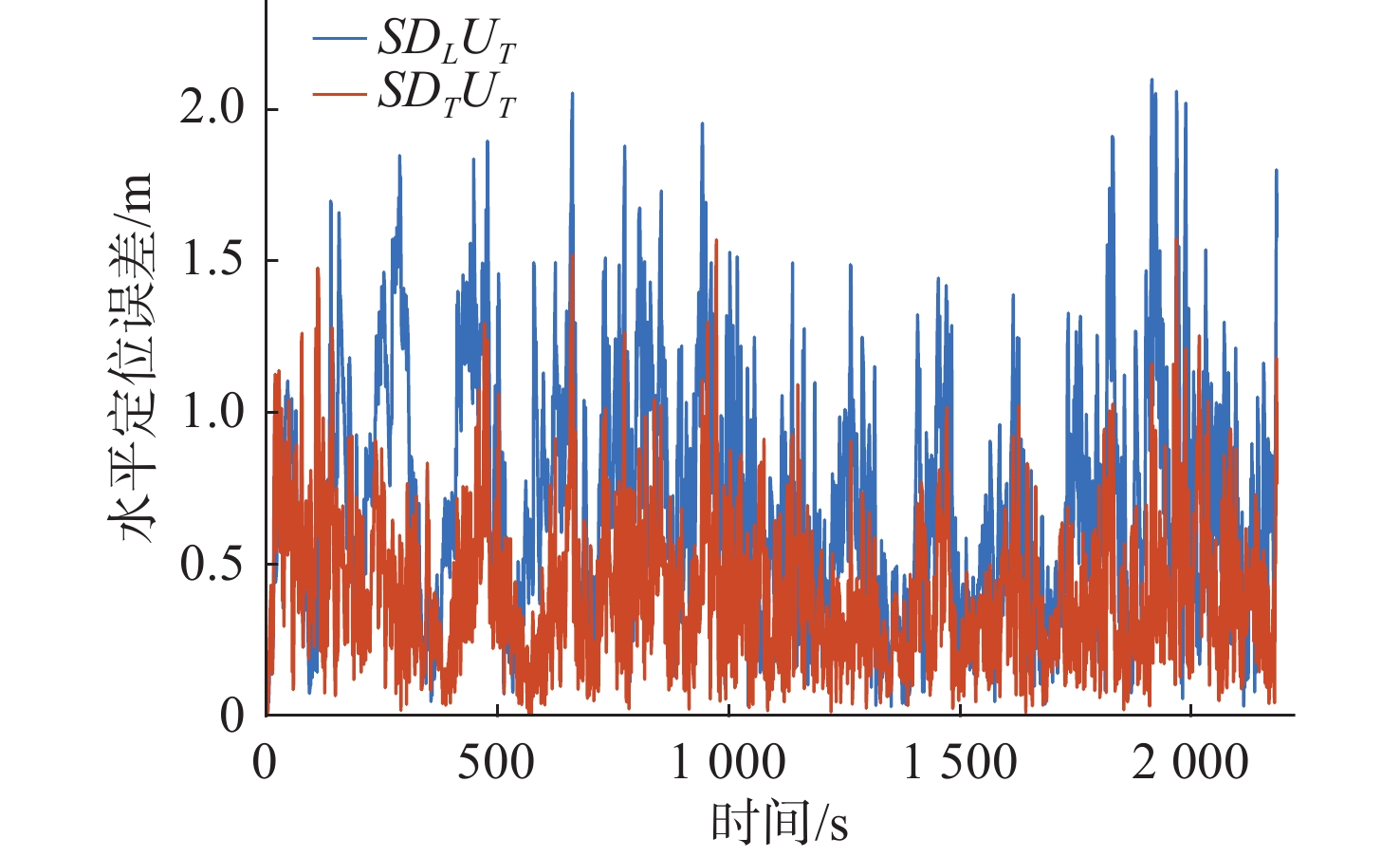
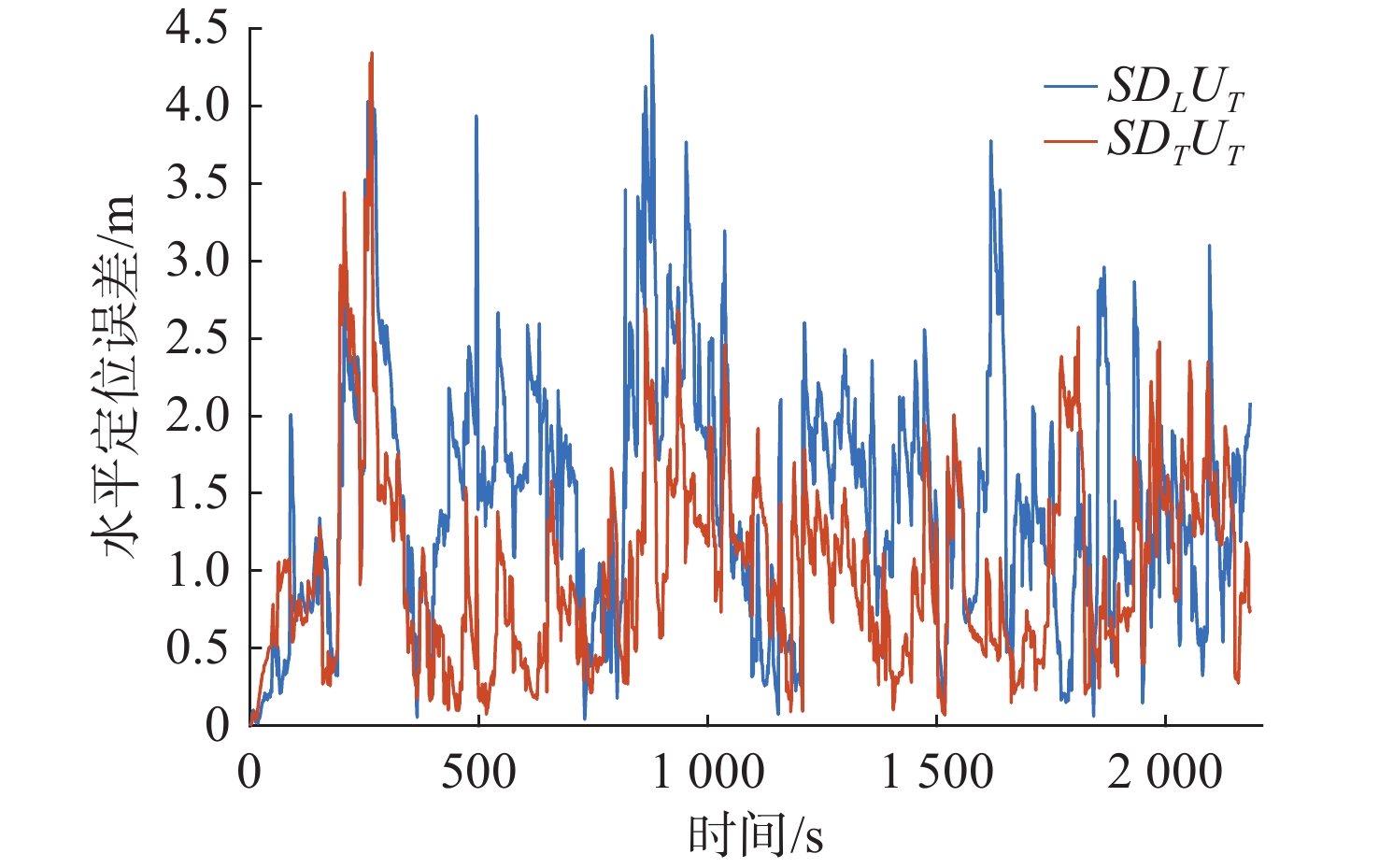
图 10 USBL数据失效情况下的水平定位误差
Figure 10. Level positioning error in case of USBL data failure
表 1 传感器误差参数
Table 1. The error parameters of sensors
设备参数 误差 SINS陀螺仪零漂/((°)/h) 0.02 SINS陀螺仪随机游走/$({ {({}^\circ)}/{\sqrt {\text{h} } } })$ 0.005 SINS加速度计零偏/μg 50 SINS加速度计游走/$({ { {\text{μg} } } / {\sqrt { {\rm{Hz} } } } })$ 50 DVL比例因子误差/% 0.5 DVL安装角误差/(°) $[{0.3 }\;\;\;{ - 0.2 }\;\;\;{0.6 }]$ USBL方位角、高度角误差/(°) $0.1$、$0.1$ USBL斜距误差系数/% 0.5 USBL安装角误差/(°) $[{0.5 }\;\;\;{ - 0.5 }\;\;\;{ { {0.5}} } ]$ PS常值偏置/m 0.05 PS随机偏置/m 0.01  下载: 导出CSV
下载: 导出CSV
表 2 不同组合导航方法水平定位误差RMSE对比
Table 2. Comparison of level positioning error RMSE
组合导航方法 水平定位误差RMSE/m $S {D_T}$ 3.224 2 $S {U_T}$ 1.852 9 $S {D_L}{U_T}$ 0.579 4 $S {D_T}{U_T}$ 0.446 5
下载: 导出CSV
表 3 数据失效情况下不同量测的集中滤波方法水平定位误差RMSE
Table 3. Level positioning error RMSE of the concentrated filter methods based on different measurements in case of data invalidation
数据情况 $S {D_L}{U_T}$定位
误差RMSE/m$S {D_T}{U_T}$定位
误差RMSE/m数据正常 0.5794 0.4465 DVL数据异常 0.8091 0.4698 USBL数据异常 1.6710 1.1848
下载: 导出CSV
-
[1] Paull L, Saeedi S, Seto M, et al. AUV Navigation and localization: A review[J]. IEEE Journal of Oceanic Engineering, 2014, 39(1): 131-149. doi: 10.1109/JOE.2013.2278891 [2] Klein I, Diamant R. Observability analysis of DVL/PS aided INS for a maneuvering AUV[J]. Sensors, 2015, 15(10): 26818-26837. doi: 10.3390/s151026818 [3] Wu Y, Ta X, Xiao R, et al. Survey of underwater robot positioning navigation[J]. Applied Ocean Research, 2019, 90: 101845. doi: 10.1016/j.apor.2019.06.002 [4] Guo S, He B, Feng C, et al. Fault tolerant multi-sensor federated filter for AUV integrated navigation[C]//2019 IEEE Underwater Technology. Kaohsiung, Taiwan: IEEE, 2019: 1-4. [5] Luo Q, Yan X, Wang C, et al. A SINS/DVL/USBL integrated navigation and positioning IoT system with multiple sources fusion and federated Kalman filter[J]. Journal of Cloud Computing, 2022, 11(1): 18-34. doi: 10.1186/s13677-022-00289-3 [6] Asaf T, Itzik K, Reuven K. Inertial navigation system (INS)/Doppler velocity log(DVL) fusion with partial DVL measurements[J]. Sensors, 2017, 17(2): 415-435. doi: 10.3390/s17020415 [7] 陈建华, 朱海, 王超, 等. 水下SINS/DVL紧组合导航算法[J]. 海军工程大学学报, 2017, 29(2): 108-112.Chen Jianhua, Zhu Hai, Wang Chao, et al. Underwater SINS/DVL tightly integrated navigation algorithm[J]. Journal of Naval University of Engineering, 2017, 29(2): 108-112. [8] 张亚文, 莫明岗, 马小艳, 等. 一种基于相对测量信息的SINS/USBL组合导航算法[J]. 导航定位与授时, 2016, 3(2): 7-13. doi: 10.19306/j.cnki.2095-8110.2016.02.002Zhang Yawen, Mo Minggang, Ma Xiaoyan, et al. An algorithm used in underwater SINS/USBL integrated navigation[J]. Navigation Positioning and Timing, 2016, 3(2): 7-13. doi: 10.19306/j.cnki.2095-8110.2016.02.002 [9] 胡贺庆. 基于USBL辅助SINS的AUV导航技术研究[D]. 南京: 东南大学, 2017. [10] 徐博, 郝芮, 王超, 等. 基于倒置声学基阵的INS/USBL组合导航算法研究[J]. 海洋技术学报, 2017, 36(5): 46-54.Xu Bo, Hao Rui, Wang Chao, et al. Research on INS/USBL integrated navigation algorithm based on the inverted acoustic array[J]. Journal of Ocean Technology, 2017, 36(5): 46-54. [11] 翁铖铖. SINS/USBL水下组合定位系统的标定与组合算法研究[D]. 南京: 东南大学, 2020. [12] 张涛, 徐晓苏, 李瑶, 等. 基于惯导及水下声学辅助系统的AUV容错导航技术[J]. 中国惯性技术学报, 2013, 21(4): 512-516. doi: 10.3969/j.issn.1005-6734.2013.04.018Zhang Tao, Xu Xiaosu, Li Yao, et al. AUV fault-tolerant technology based on inertial navigation and underwater acoustics assisted navigation system[J]. Journal of Chinese Inertial Technology, 2013, 21(4): 512-516. doi: 10.3969/j.issn.1005-6734.2013.04.018 [13] 王彬, 翁海娜, 梁瑾, 等. 一种惯性/水声单应答器距离组合导航方法[J]. 中国惯性技术学报, 2017, 25(1): 86-90.Wang Bin, Weng Haina, Liang Jin, et al. Inertial/acoustic range integrated navigation with single transponder[J]. Journal of Chinese Inertial Technology, 2017, 25(1): 86-90. [14] 张亚文, 莫明岗, 马小艳, 等. 一种基于集中滤波的SINS/DVL/USBL水下组合导航算法[J]. 导航定位与授时, 2017, 4(1): 25-31.Zhang Yawen, Mo Minggang, Ma Xiaoyan, et al. An algorithm of underwater SINS/DVL/USBL integrated navigation based on concentrated filtering[J]. Navigation Positioning and Timing, 2017, 4(1): 25-31. [15] 徐博, 郝芮, 王超, 等. 水下潜航器的惯导/超短基线/多普勒测速信息融合及容错验证[J]. 光学精密工程, 2017, 25(9): 2508-2515. doi: 10.3788/OPE.20172509.2508Xu Bo, Hao Rui, Wang Chao, et al. INS/USBL/DVL information fusion and fault-tolerant verification for underwater vehicles[J]. Optics and Precision Engineering, 2017, 25(9): 2508-2515. doi: 10.3788/OPE.20172509.2508 [16] Wang D, Xu X, Yao Y, et al. A novel SINS/DVL tightly integrated navigation method for complex environment[J]. IEEE Transactions on Instrumentation and Measurement, 2019, 69(7): 5183-5196. [17] Liu S, Zhang T, Zhang J, et al. A new coupled method of SINS/DVL integrated navigation based on improved dual adaptive factors[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 1-11. [18] 刘锡祥. 捷联式惯性导航系统初始对准理论与方法[M]. 北京: 科学技术出版社, 2019. [19] 刘云. SINS/USBL组合导航技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2020. [20] Liu P, Wang B, Deng Z, et al. INS/DVL/PS tightly coupled underwater navigation method with limited DVL measurements[J]. IEEE Sensors Journal, 2018, 18(7): 2994-3002. doi: 10.1109/JSEN.2018.2800165 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 633
- HTML全文浏览量: 505
- PDF下载量: 113
- 被引次数: 0