

Continuous Wave Signal Detection Based on Weight Vector under Colored Gaussian Noise
-
摘要: 针对高斯色噪声背景下信号检测需要进行预白化处理的问题, 提出了一种基于权向量的信号检测方法。首先基于权向量构造检验统计量, 分析其检测性能, 在此基础上推导了N-P准则下的最优权向量, 并证明了其与广义匹配滤波的等价性。通过构造合适的权向量, 证明在大数据记录下检测连续波信号时无须进行预白处理, 可以明显提高检测效率。仿真结果表明了该检测方法的有效性。Abstract: Signal detection under colored Gaussian noise needs pre-white processing. In view of this, a signal detection method based on a weight vector was proposed. Firstly, the test statistics were constructed based on the weight vector, and its detection performance was analyzed. On this basis, the optimal weight vector under the N-P criterion was derived, and its equivalence with the generalized matched filter was proved. By constructing a suitable weight vector, it was proved that there was no need for prewhitening when continuous wave signals were detected in big data records, which significantly improved the detection efficiency. The simulation results verify the effectiveness of the detection method.
-
Key words:
- colored Gaussian noise /
- weight vector /
- signal detection /
- continuous wave signal /
- prewhitening
-
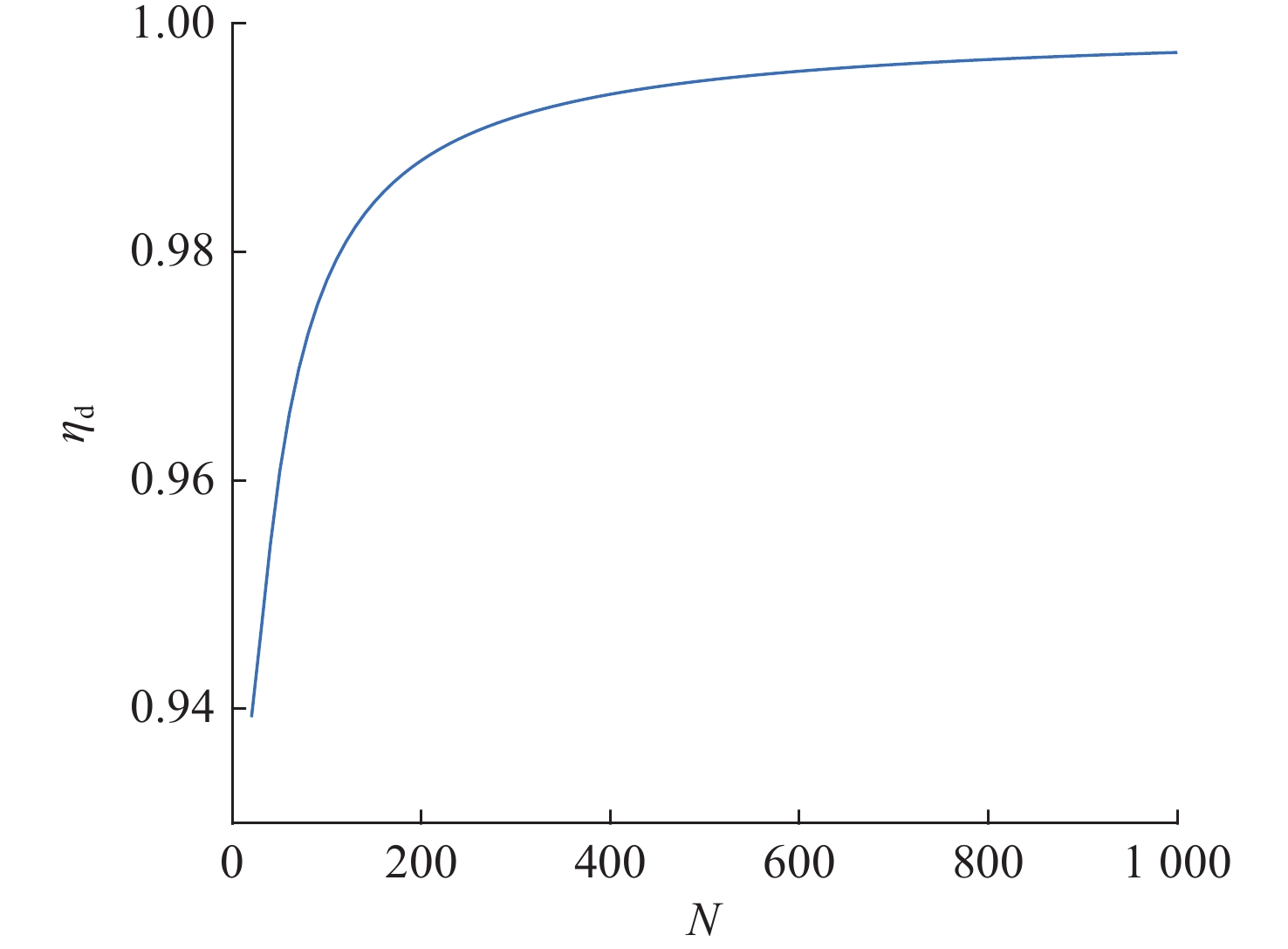
图 1 N-
$ {{\boldsymbol{\eta}} _{\boldsymbol{d}}} $ 曲线Figure 1. Curve of N-
$ {{\boldsymbol{\eta}} _{\boldsymbol{d}}} $ -
[1] 雷江涛, 董萌, 张国锋. 浅水环境鱼雷声自导波形设计与分析[J]. 鱼雷技术, 2016, 24(5): 346-350.Lei Jiangtao, Dong Meng, Zhang Guofeng. Waveform design and analysis of torpedo acoustic homing in shallow water[J]. Torpedo Technology, 2016, 24(5): 346-350. [2] 王晓江, 陈旭敏, 裴欣栋, 等. 雷达脉冲信号的非线性四阶检测接收机[J]. 现代雷达, 2017, 39(3): 69-74. doi: 10.16592/j.cnki.1004-7859.2017.03.016 [3] 夏文杰, 黎鑫, 曹伟浩, 等. 基于分数阶功率谱熵的未知水声脉冲信号检测方法[J]. 声学技术, 2021, 40(3): 415-421. doi: 10.16300/j.cnki.1000-3630.2021.03.019 [4] 杨波, 朱敏, 武岩波, 等. 一种在色噪声环境下的信号检测方法[J]. 应用声学, 2015, 34(1): 85-89. doi: 10.11684/j.issn.1000-310X.2015.01.013 [5] 李海宁, 苏小应, 俞卞章, 等. 一种改进的有色噪声背景下信号的检测算法[J]. 计算机仿真, 2009, 26(1): 355-357. doi: 10.3969/j.issn.1006-9348.2009.01.094 [6] Ruiz-Molina J C, Navarro-Moreno J, Oya A. Signal detection using approximate Karhunen-Loève expansions[J]. IEEE Transactions on Information Theory, 2001, 47(4): 1672-1680. [7] 齐志强. 基于Cholesky分解的自适应抗干扰算法[J]. 火力与指挥控制, 2019, 44(4): 150-153. doi: 10.3969/j.issn.1002-0640.2019.04.030 [8] 舒象兰, 孙荣光, 马鑫. 强混响背景下 LFM 信号回波检测[J]. 电讯技术, 2016, 56(1): 82-87. [9] 王志刚, 丁义明. 信噪比在AR模型定阶方法选择中的研究[J]. 数学物理学报: A辑, 2020, 40(3): 811-823. [10] 赵树杰. 信号检测与估计理论[M]. 北京: 电子工业出版社, 2013. -



 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 496
- HTML全文浏览量: 162
- PDF下载量: 60
- 被引次数: 0

图(2)




