Ship Wake Detection Based on One-Dimensional Convolutional Neural Network
-
摘要: 为了提高舰船尾流的检测准确率, 提出一种基于一维卷积神经网络(1DCNN)的舰船尾流检测方法。利用舰船尾流散射回波模型构建仿真数据集, 通过水箱仿真实验验证散射回波模型的可靠性并构建实验数据集, 最后综合考虑不同结构模型的检测准确率和参数量搭建了1DCNN并与传统检测算法(基于单分类支持向量机和反向传播神经网络)在数据集上进行对比分析。仿真结果表明, 相比与传统检测算法, 文中所提出的1DCNN提高了不同信噪比下舰船尾流的检测准确率和检测效率, 具有较好的工程应用价值。Abstract: In order to improve the detection accuracy of ship wake, this paper proposed a ship wake detection method based on a one-dimensional convolutional neural network (1DCNN). Firstly, the simulation data set was constructed by using the ship wake scattering echo model. Then the reliability of the scattering echo model was verified by the water tank simulation experiment, and the experimental data set was constructed. Finally, a 1DCNN was built by comprehensively considering the detection accuracy and parameter quantity of different structural models and compared with the traditional detection algorithm (based on a one-class support vector machine and back propagation neural network) on the data set. The simulation results show that compared with the traditional detection algorithm, the 1DCNN proposed in this paper improves the detection accuracy and detection efficiency of ship wake under different signal-to-noise ratios and has good engineering application value.
-

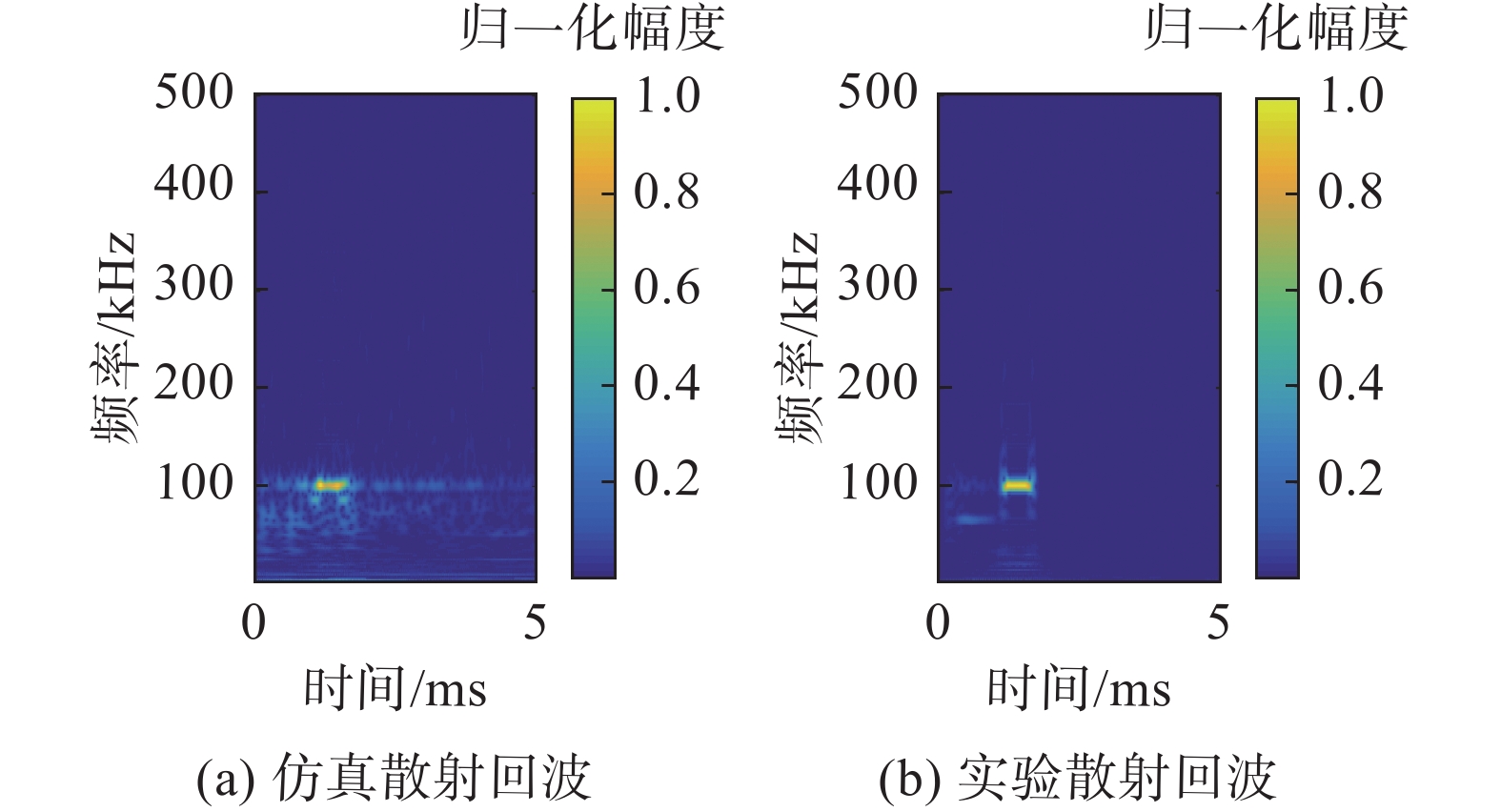
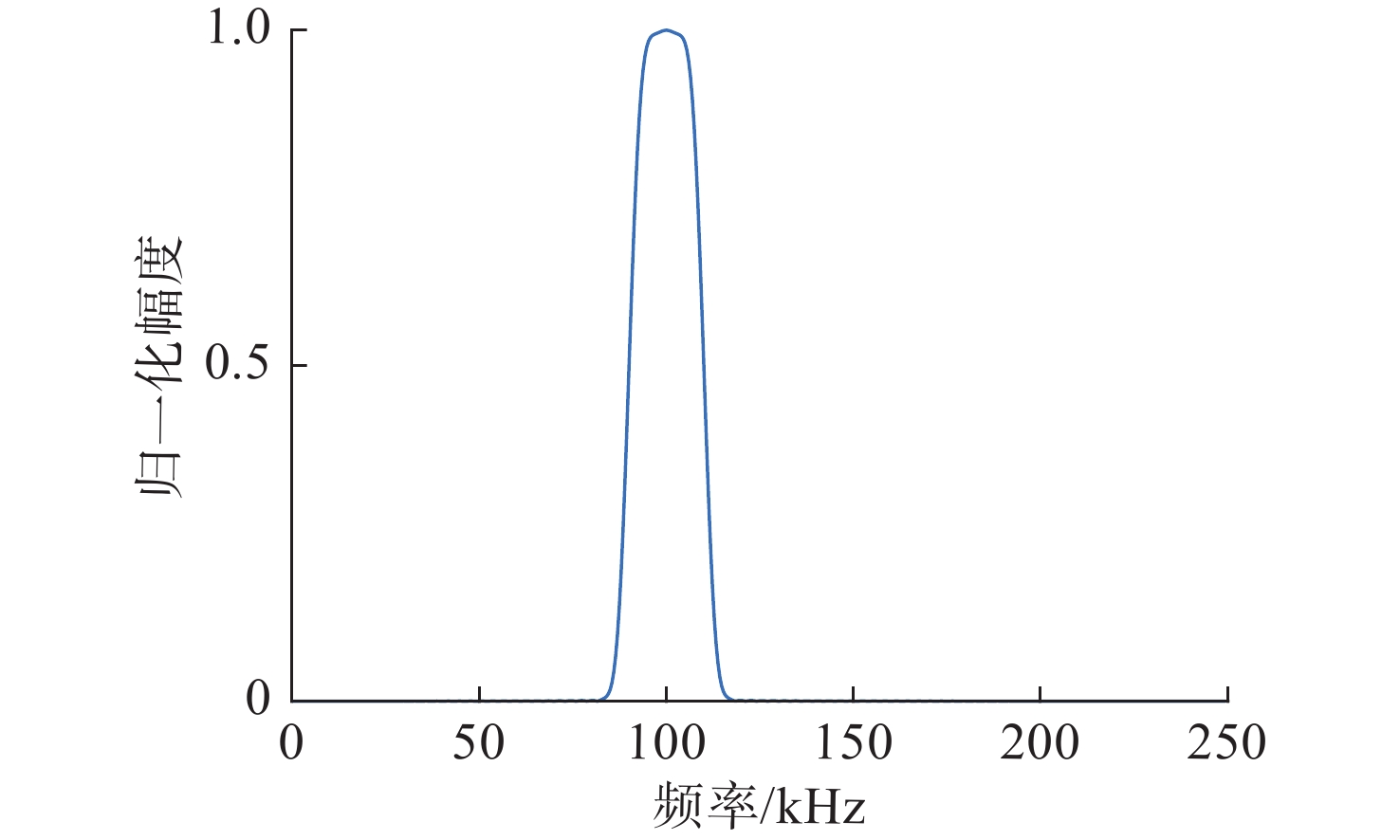
图 4 仿真和实验散射回波时频特性
Figure 4. Time-frequency characteristics of simulated and experimental scattering echoes
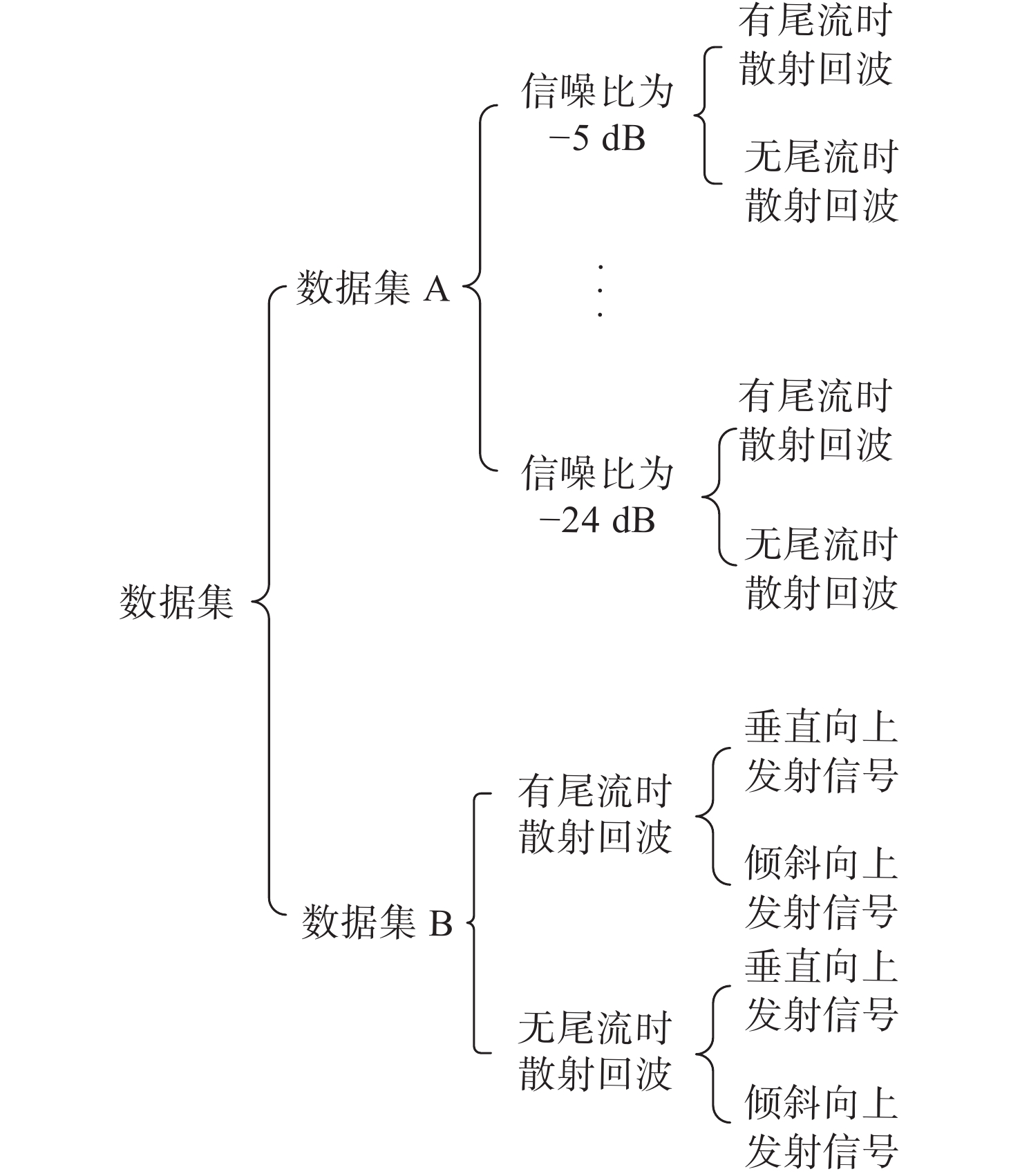
表 1 数据集A构成
Table 1. Composition of data set A
距水面
距离/m收发平台
速度/(m/s)声源发射
信号角
/(°)有尾流散射
回波个数无尾流散射
回波个数15 0 90 120 120 15 0 60 120 120 15 20 90 120 120 15 20 60 120 120 20 0 90 120 120 20 0 60 120 120 20 20 90 120 120 20 20 60 120 120 25 0 90 120 120 25 0 60 120 120 25 20 90 120 120 25 20 60 120 120  下载: 导出CSV
下载: 导出CSV
表 2 不同卷积层数模型参数表
Table 2. Parameters of models with different convolutional layers
卷积层 卷积层数 4 5 6 第1层 1×125, 32 1×125, 32 1×125, 32 第2层 1×15, 32 1×15, 32 1×15, 32 第3层 1×3, 64 1×3, 64 1×3, 64 第4层 1×3, 32 1×3, 32 1×3, 32 第5层 — 1×3, 32 1×3, 32 第6层 — — 1×3, 32
下载: 导出CSV
表 3 不同卷积层数模型检测准确率
Table 3. Model detection accuracy with different convolu tional layers
单位:% 信噪比/dB 卷积层数 4 5 6 −20 98.32 99.48 99.64 −21 95.15 99.25 99.51 −22 92.82 99.10 99.20 −23 90.10 96.60 94.50 −24 87.85 93.28 90.15
下载: 导出CSV
表 4 不同卷积层数模型参数量
Table 4. Model parameter quantity with different convolution layers
卷积层数 参数量 4 362 90 5 39 394 6 42 498
下载: 导出CSV
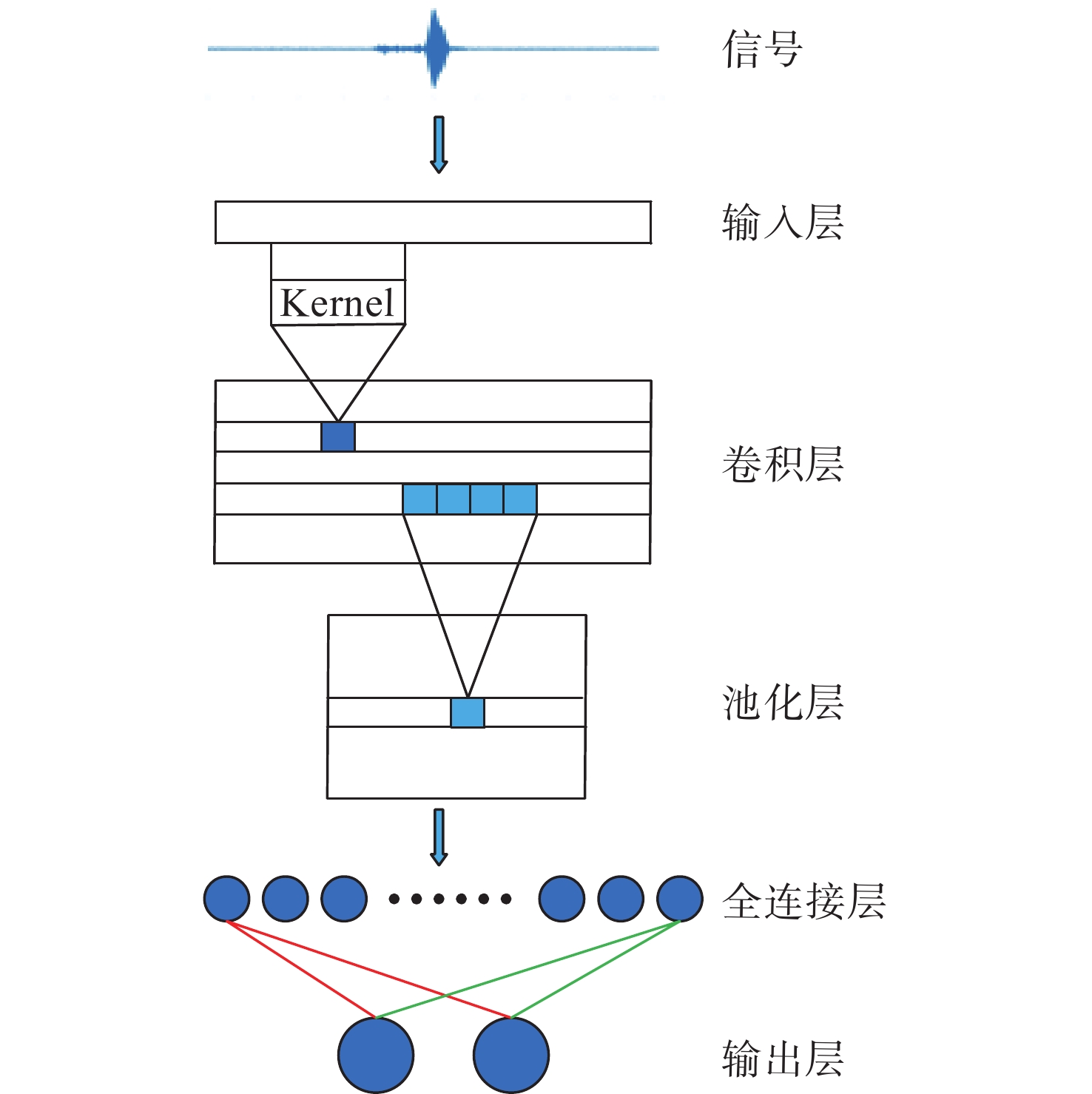
表 5 1DCNN结构参数表
Table 5. Parameters of 1DCNN structure
结构 层参数 步长 填充 输入输出大小 输入层 — — — 1×25 000 卷积层 1×125, 32 16 Valid 1×1 555×32 池化层 1×3 2 Valid 1×776×32 卷积层 1×15, 32 4 Valid 1×191×32 池化层 1×3 2 Valid 1×96×32 卷积层 1×3, 64 2 Valid 1×47×64 池化层 1×3 2 Valid 1×24×64 卷积层 1×3, 32 1 Valid 1×22×32 池化层 1×3 2 Valid 1×11×32 卷积层 1×3, 32 1 Valid 1×9×32 GMP 32 — — — 全连接层 128 — — — 全连接层 2 — — — Softmax — — — —
下载: 导出CSV
表 6 不同算法在数据集A和B的检测准确率
Table 6. Detection accuracy of different algorithms on data sets A and B
单位:% 算法 数据集A 数据集B SNR=−5 dB SNR=−10 dB SNR=−15 dB 1DCNN 100.00 99.98 99.85 100.00 OCSVM 98.75 96.60 75.00 99.20 BP神经网络 95.20 90.00 63.75 98.43
下载: 导出CSV
表 7 变数据集检测准确率
Table 7. Detection accuracy of change dataset
单位:% 试验过程 SNR(数据集A)/dB −10 −15 −20 A→B 97.89 97.85 95.43 B→A 96.8 95.67 52.10
下载: 导出CSV
表 8 不同网络模块配置下的检测准确率
Table 8. Detection accuracy under different network module configurations
网络结构类别 数据集A检测准确率/% 数据集B
检测准确率/%参数量 SNR=−22 dB SNR=−23 dB SNR=−24 dB 1(小卷积核和MP) 53.50 52.30 51.26 96.8 43 682 2(大卷积核和MP) 96.18 83.30 50.00 100.0 47 568 3(小卷积核和GMP) 53.99 53.21 52.53 98.2 35 450 4(大卷积核和GMP) 99.10 96.60 93.28 100.0 39 394
下载: 导出CSV
-
[1] 王成, 吴岩, 杨廷飞. 利用改进单分类支持向量机提升舰船尾流目标的检测准确率[J]. 兵工学报, 2020, 41(9): 1887-1893.Wang Cheng, Wu Yan, Yang Tingfei. Improving the detection accuracy of wake targets by improved one-class support vector machine[J]. Acta Armamentarii, 2020, 41(9): 1887-1893. [2] 樊书宏, 严冰, 刘昆仑, 等. 舰船尾流侧向声检测方法[J]. 声学技术, 2011, 30(6): 474-479.Fan Shuhong, Yan Bing, Liu Kunlun, et al. A study of ships wake detection by side acoustic scattering[J]. Technical Acoustics, 2011, 30(6): 474-479. [3] Jeong S, Ban S W, Choi S, et al. Surface ship-wake detection using active sonar and one-class support vector machine[J]. IEEE Journal of Oceanic Engineering, 2012, 37(3): 456-466. doi: 10.1109/JOE.2012.2192344 [4] 金磊磊, 梁红, 杨长生. 基于卷积神经网络的水下目标声呐图像识别方法[J]. 西北工业大学学报, 2021, 39(2): 285-291. doi: 10.1051/jnwpu/20213920285Jin Leilei, Liang Hong, Yang Changsheng. Sonar image recognition of underwater target based on convolutional neural network[J]. Joumal of Nonhwestem Polytechnical University, 2021, 39(2): 285-291. doi: 10.1051/jnwpu/20213920285 [5] Ferguson E L, Ramakrishnan R, Williams S B, et al. Convolutional neural networks for passive monitoring of a shallow water environment using a single sensor[C]//2017 IEEE International Conference on Acoustics, Speech and Signal Processing(ICASSP). New Orleans, LA, USA: IEEE, 2017: 2657-2661. [6] Razzak M I, Naz S, Zaib A. Deep learning for medical image processing: Overview, challenges and the future[EB/OL]. (2017-04-22)[2022-08-29]. https://arxiv.org/abs/1704.06825v1. [7] R J 尤立克. 水声学原理[M]. 洪申, 译. 哈尔滨: 哈尔滨船舶工程学院出版社, 1990. [8] Keller J B, Miksis M. Bubble oscillations of large amplitude[J]. The Journal of the Acoustical Society of America, 1980, 68(2): 628-633. doi: 10.1121/1.384720 [9] 王虹斌. 水中气泡幕的多体多次声散射模型分析[J]. 船舶工程, 2006, 28(3): 30-33. doi: 10.13788/j.cnki.cbgc.2006.03.008Wang Hongbin. Analysis of multi-body multi-dispersion model for bubble screen[J]. Ship Engineering, 2006, 28(3): 30-33. doi: 10.13788/j.cnki.cbgc.2006.03.008 [10] Leifer I, Patro R K. The bubble mechanism for methane transport from the shallow sea bed to the surface: A review and sensitivity study[J]. Continental Shelf Research, 2002, 22(16): 2409-2428. doi: 10.1016/S0278-4343(02)00065-1 [11] 陈维兴, 崔朝臣, 李小菁, 等. 基于多种小波变换的一维卷积循环神经网络的风电机组轴承故障诊断[J]. 计量学报, 2006, 28(3): 30-33.Chen Weixing, Cui Chaochen, Li Xiaojing, et al. Bearing fault diagnosis of wind turbine based on multi-wavelet-1 d convolutional LSTM[J]. Acta Metrologica Sinica, 2006, 28(3): 30-33. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 585
- HTML全文浏览量: 188
- PDF下载量: 94
- 被引次数: 0