

Adaptive-Disturbance-Observer Based Backstepping Control for Underwater Vehicle-Manipulator Systems
-
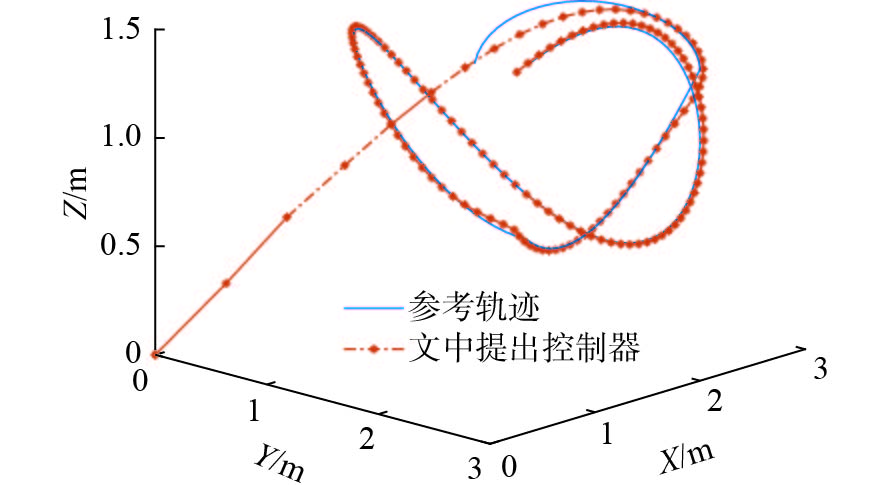
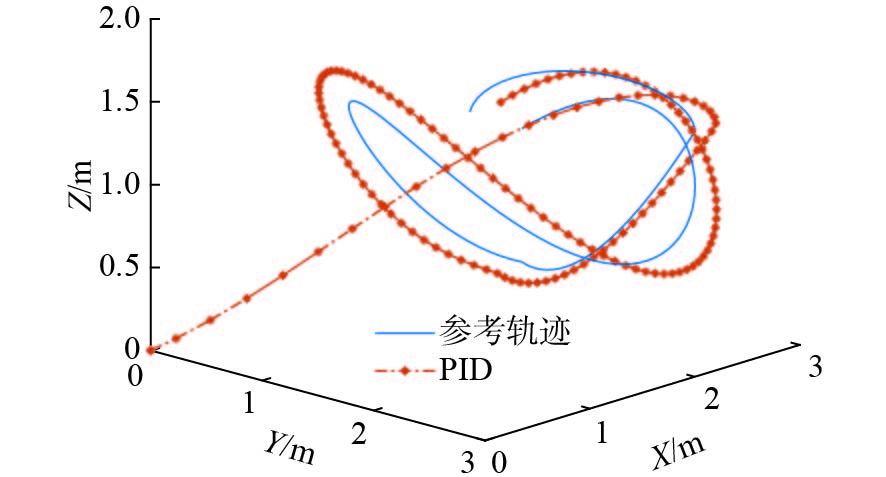
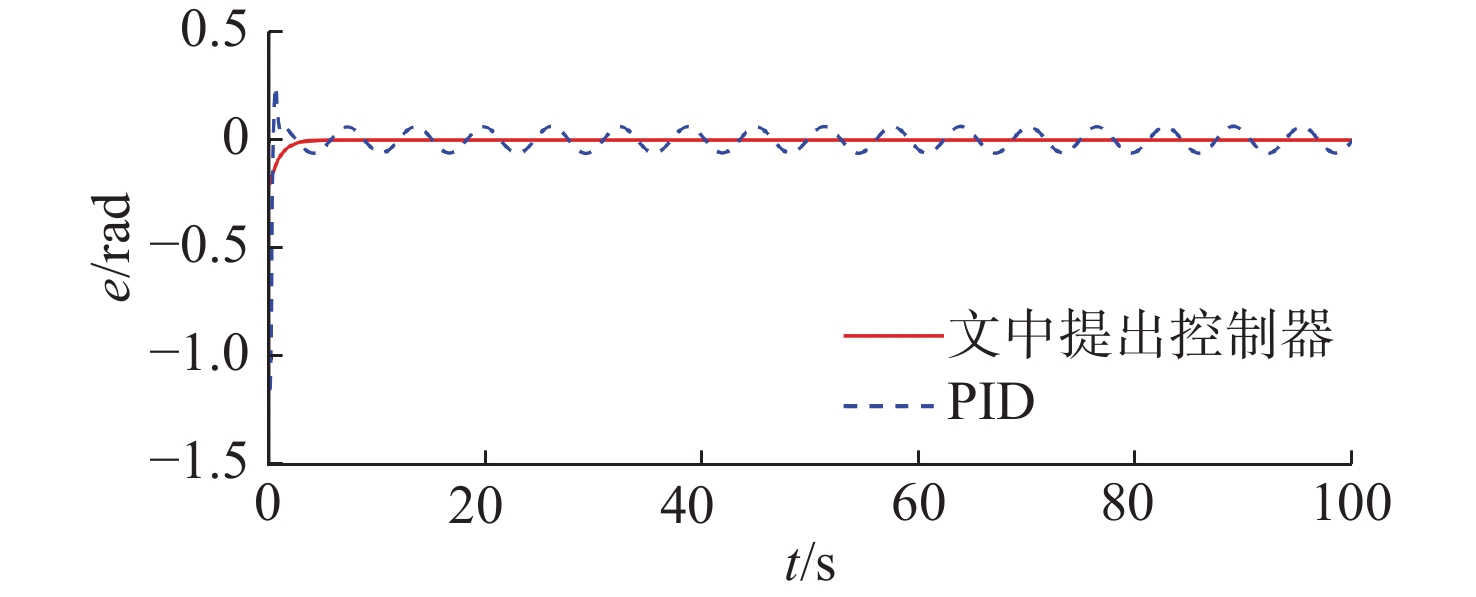
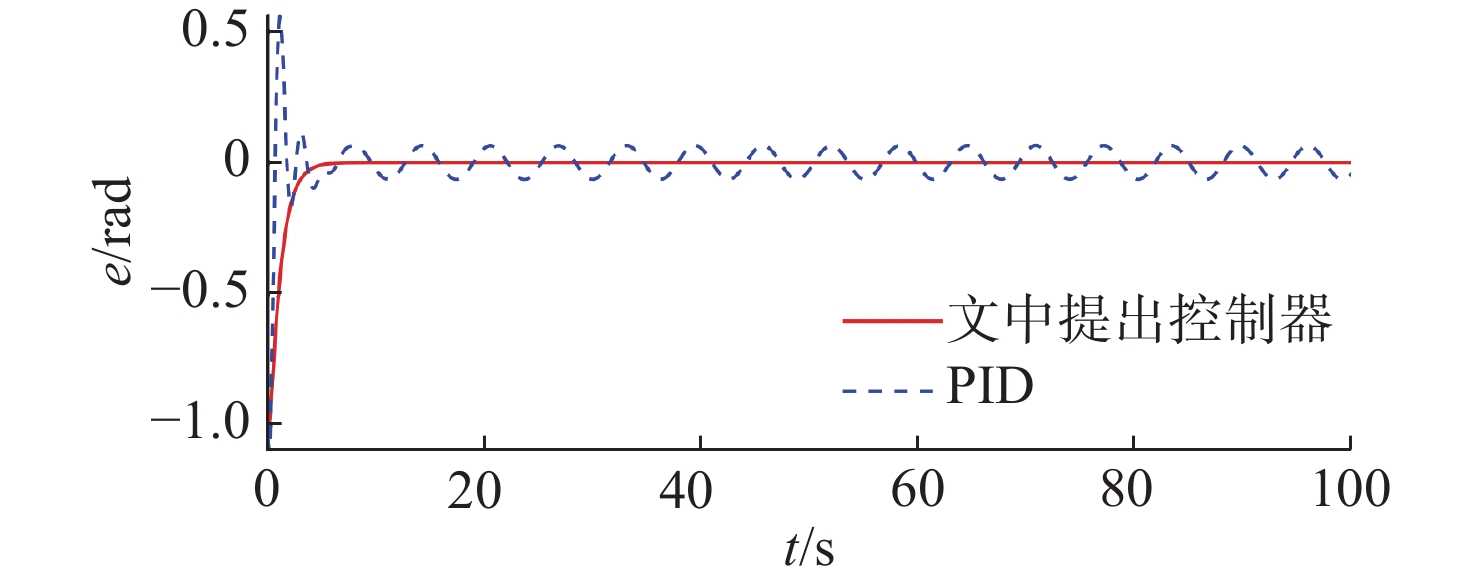
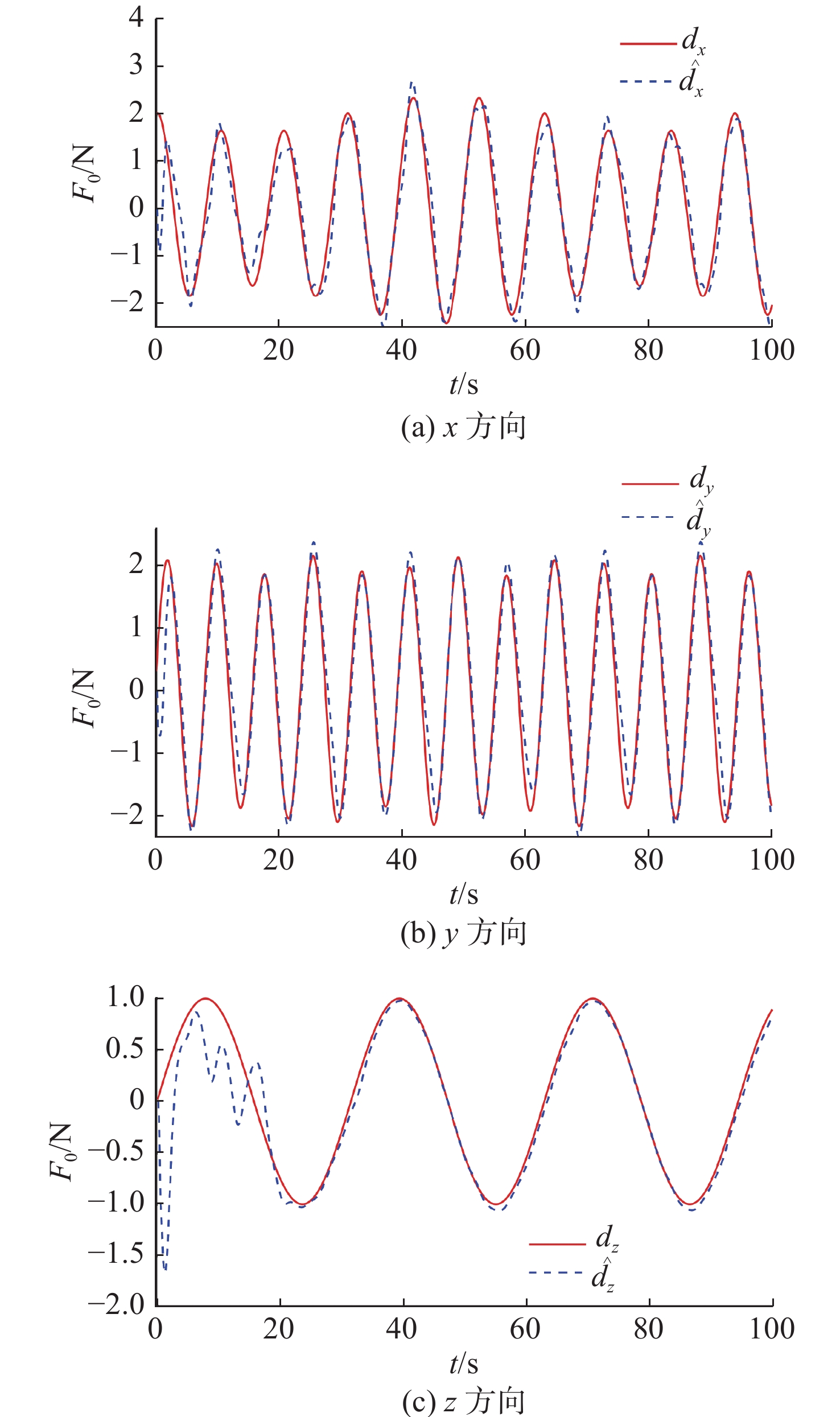
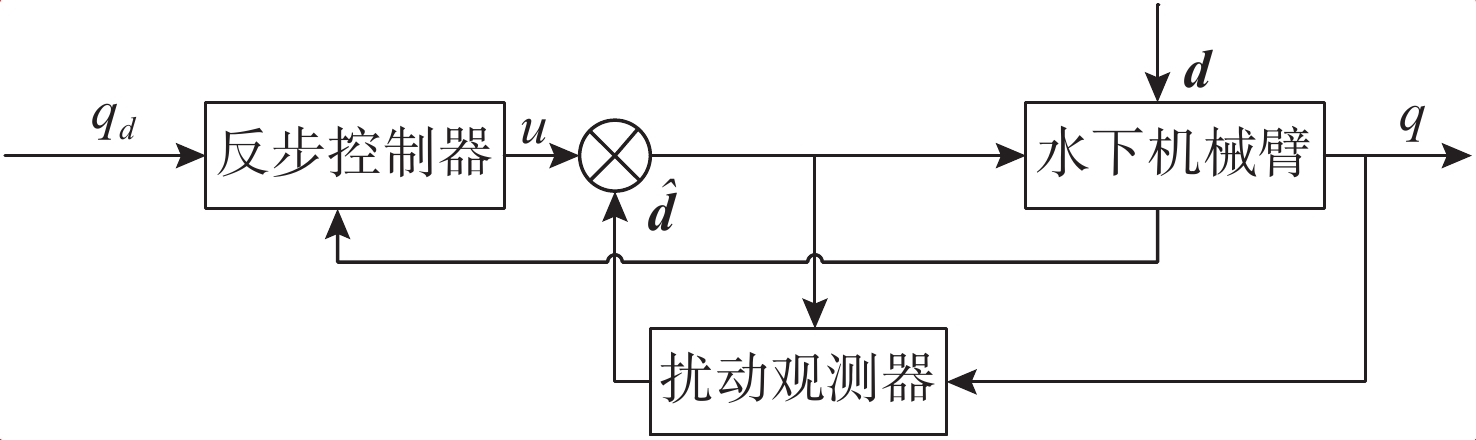
摘要: 针对水下机器人-机械臂系统的强耦合、建模不确定性和环境扰动复杂的特点, 提出了一种自适应干扰观测器的反步控制方法。将海洋多源干扰用线性外系统描述, 设计自适应观测器进行估计。针对实际驱动器存在的输入饱和问题, 设计了辅助动力系统。在此基础上, 进一步设计了反步控制器, 并通过李雅普诺夫理论分析了闭环跟踪系统的有界稳定性。最后通过2 关节水下机器人-机械臂系统进行仿真验证, 结果表明与传统的比例积分微分控制相比, 文中方法能够更好地使机器人-机械臂系统跟踪预定轨迹, 且具有更好的抗干扰能力。
-
关键词:
- 水下机器人-机械臂系统 /
- 自适应干扰观测器 /
- 反步控制
Abstract: To resolve problems involving undersea vehicle-manipulator systems(UVMSs) with coupling terms, model uncertainties, and disturbances, an adaptive-disturbance-observer-based backstepping control method is proposed. Ocean multi-source disturbances are described by a linear exosystem and an adaptive disturbance observer is presented to estimate the disturbances. To address saturation of the actuators, an auxiliary dynamic system is given. A backstepping control method is then presented to ensure that the closed-loop tracking system is bounded by the Lyapunov theory. Finally, simulations are conducted on a kind of UVMS with two joints, and the simulation results demonstrate that the proposed method exhibits better performance in terms of trajectory tracking and antidisturbance than the traditional proportional-integral-derivative control method. -

图 2 基于自适应干扰观测器的反步控制作用下UVMS本体跟踪情况
Figure 2. The tracking results of UVMS under the backstepping control based adaptive disturbance observer
-
[1] Fossen T I. Guidance and control of ocean vehicles[M]. New York: John Wiley & Sons Inc, 1994. [2] Mahesh H, Yuh J, Lakshmi R. A coordinated control of an underwater vehicle and robotic manipulator[J]. Journal of Robotic Systems, 1991, 8(3): 339-370. [3] Polycarpou M M, Ioannou P A. A robust adaptive nonlinear control design[J]. Automatica, 1996, 32(3): 423-427. doi: 10.1016/0005-1098(95)00147-6 [4] Yu S H, Long X J. Finite-time consensus for second-order multi-agent systems with disturbances by integral sliding mode[J]. Automatica, 2015, 54(2): 158-165. [5] Hou M, Muller P C. Disturbance decoupled observer design: A unified viewpoint[J]. IEEE Trans Automat Control, 1994, 39(6): 1338-1341. doi: 10.1109/9.293209 [6] Ohishi K, Nakao M, Ohnishi K, et al. Microprocessor-controlled DC motor for load-insensitive position servo system[J]. IEEE Trans Ind Electron, 1987, 34(1): 44-49. [7] Chen W H. Disturbance observer-based control for nonlinear systems[J]. IEEE/ASME Trans Mechatronics, 2004, 9(4): 706-710. doi: 10.1109/TMECH.2004.839034 [8] Guo L, Chen W H. Disturbance attenuation and rejection for systems with nonlinearity via DOBC approach[J]. Internat J Robust Nonlinear Control, 2005, 15(3): 109-125. doi: 10.1002/rnc.978 [9] Sun H B, Guo L. Neural network-based DOBC for a class of nonlinear systems with unmatched disturbances[J]. IEEE Trans Neural Netw Learn Syst, 2017, 28(2): 482-489. doi: 10.1109/TNNLS.2015.2511450 [10] Min J K, Wan K C. Nonlinear disturbance observer design for euler-lagrange systems: An initial study[C]//International Conference on Ubiquitous Robots and Ambient Intelligence. Incheon: IEEE, 2011: 792-793. [11] Issam A S, Yasutaka F. On nonlinear disturbance observer based tracking control for euler-lagrange systems[J]. J Syst Des Dyn, 2009, 15: 330-343. [12] Zarikian G, Serrani A. Harmonic disturbance rejection in tracking control of Euler-Lagrange systems: An external model approach[J]. IEEE Trans Control Syst Technol, 2007, 15(1): 118-129. doi: 10.1109/TCST.2006.883335 [13] Chen M, Ge S S, Ren B B. Adaptive tracking control of uncertain MIMO nonlinear systems with input constraints[J]. Automatica, 2011, 47(3): 452-465. doi: 10.1016/j.automatica.2011.01.025 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 885
- HTML全文浏览量: 208
- PDF下载量: 120
- 被引次数: 0
图(7)




