3D Angle of Arrival Target Tracking with Unbiased Pseudo-Linear Kalman Filter
-
摘要: 在3D到达角目标跟踪研究中, 伪线性卡尔曼滤波(PLKF)因计算复杂度低且对初始误差不敏感受到较大关注, 但观测矩阵与噪声之间的相关性会使PLKF的目标状态估计存在一定偏差。针对这一问题并考虑观测站存在定位误差的实际情况, 文中提出一种3D修正无偏PLKF算法。首先对方位角及俯仰角观测方程进行整体伪线性化, 通过修正噪声协方差矩阵来降低观测站定位误差对跟踪精度的影响; 其次通过分离观测矩阵中的噪声, 降低由观测矩阵和观测噪声相关性引起的估计偏差。仿真分析结果表明, 所提算法有效提高了3D到达角目标跟踪在非机动和机动2种场景下的精度, 且具有较低的计算复杂度。Abstract: In the research on 3D angle of arrival target tracking, pseudo-linear Kalman filter(PLKF) has received great attention due to its low computational complexity and insensitivity to initial errors. However, the correlation between the observation matrix and the noise will cause a certain deviation in the target state’s estimation of PLKF. In view of this problem and the actual situation that the observation station has positioning errors, a 3D-modified unbiased pseudo-linear Kalman filter(3D-MUBKF) algorithm was proposed in this paper. Firstly, the overall pseudo-linearization of the azimuth and elevation observation equations was carried out, and the influence of the observation station positioning errors on the tracking accuracy was reduced by modifying the noise covariance matrix. Secondly, by separating the noise in the observation matrix, the estimation bias caused by the correlation between the observation matrix and the observation noise was reduced. The simulation analysis results show that the proposed algorithm effectively improves the accuracy of 3D angle of arrival target tracking in both non-maneuvering and maneuvering scenarios and has low computational complexity.
-
Key words:
- target tracking /
- angle of arrival /
- Kalman filter /
- pseudo-linear estimation /
- positioning error
-

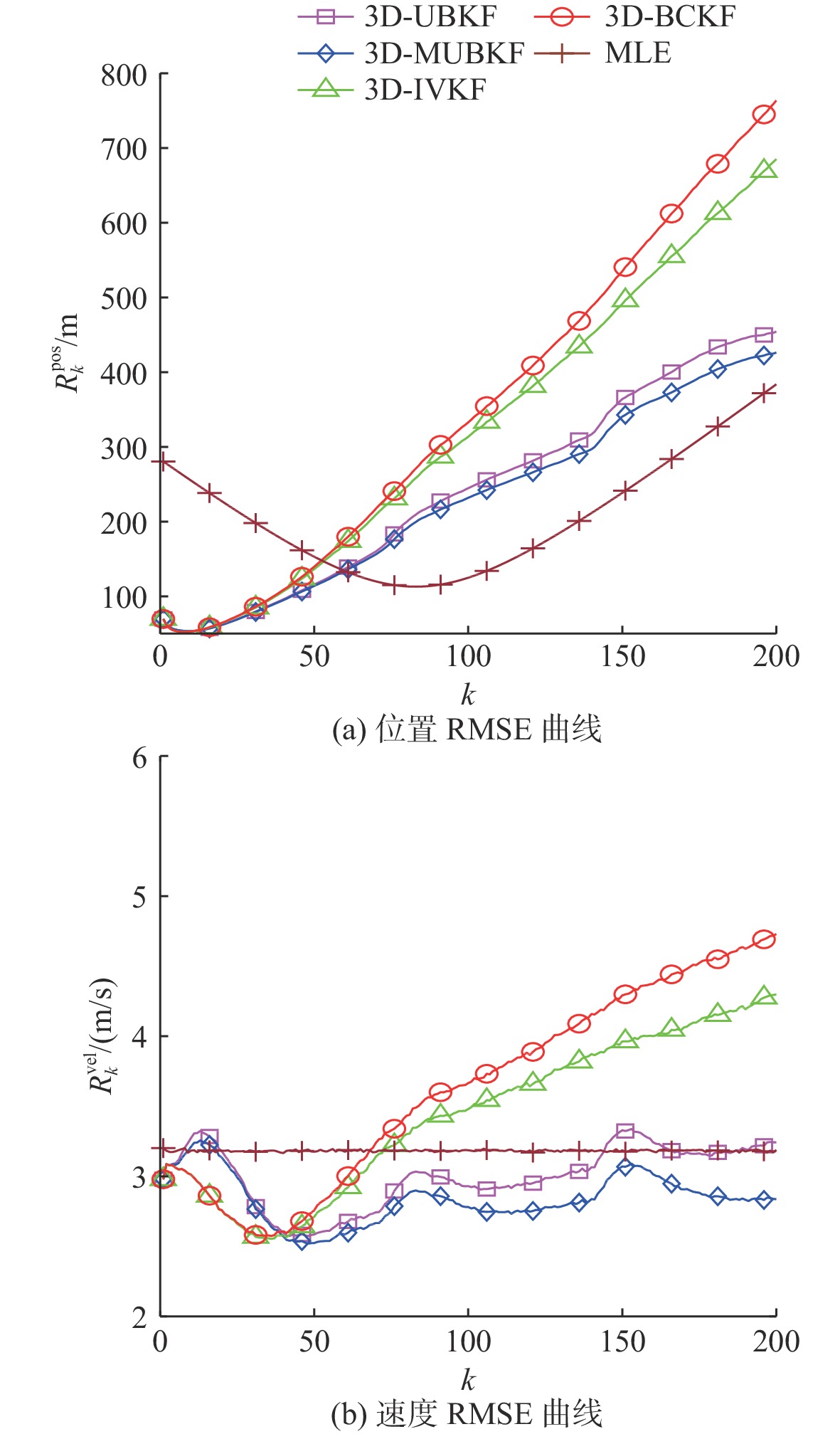
图 2 匀速目标跟踪中不同算法RMSE曲线
Figure 2. RMSE curves of different algorithms in constant-velocity target tracking

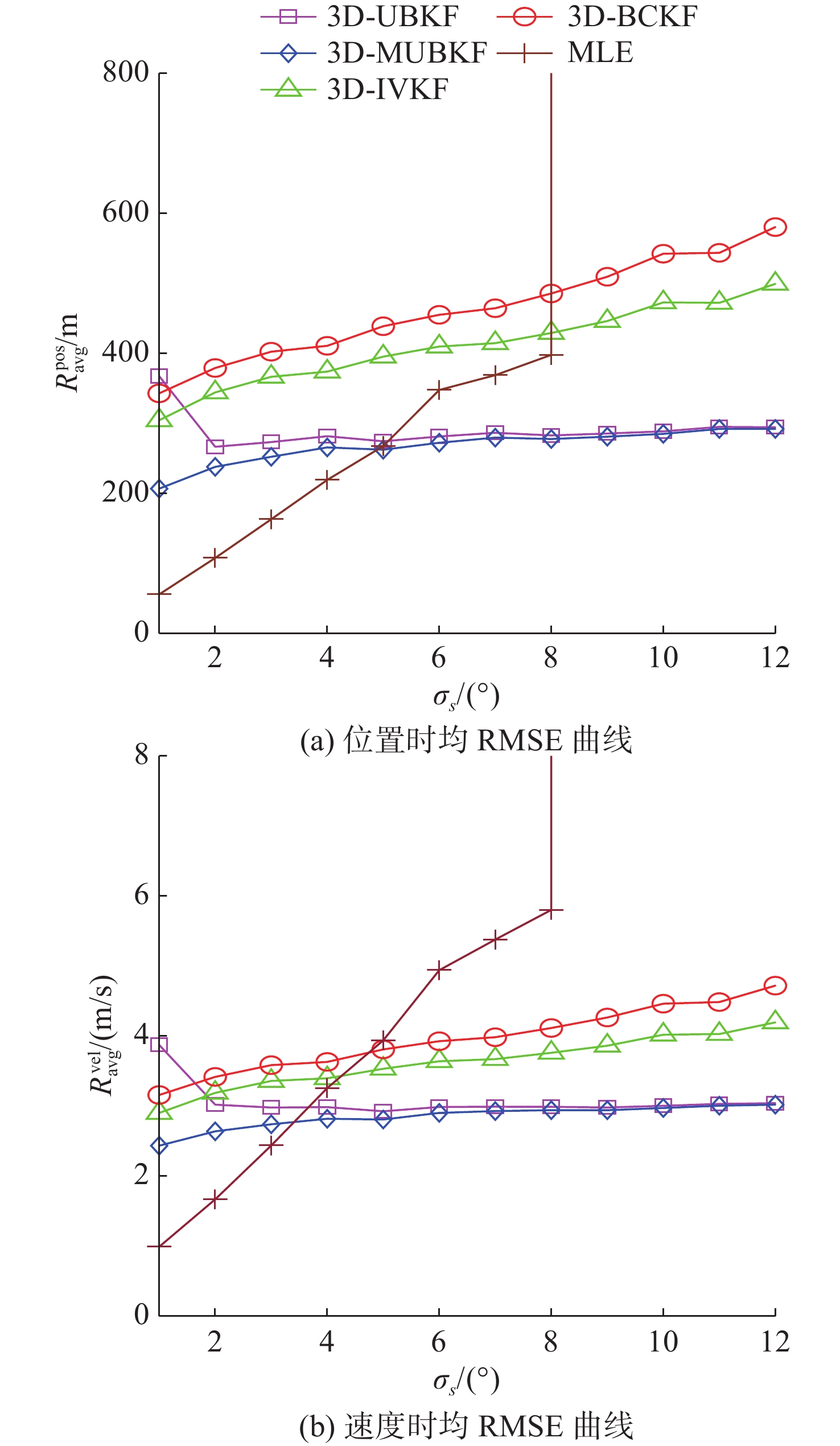
图 3 匀速目标跟踪中不同算法时均RMSE曲线
Figure 3. Time-averaged RMSE curves of different algorithms in constant-velocity target tracking

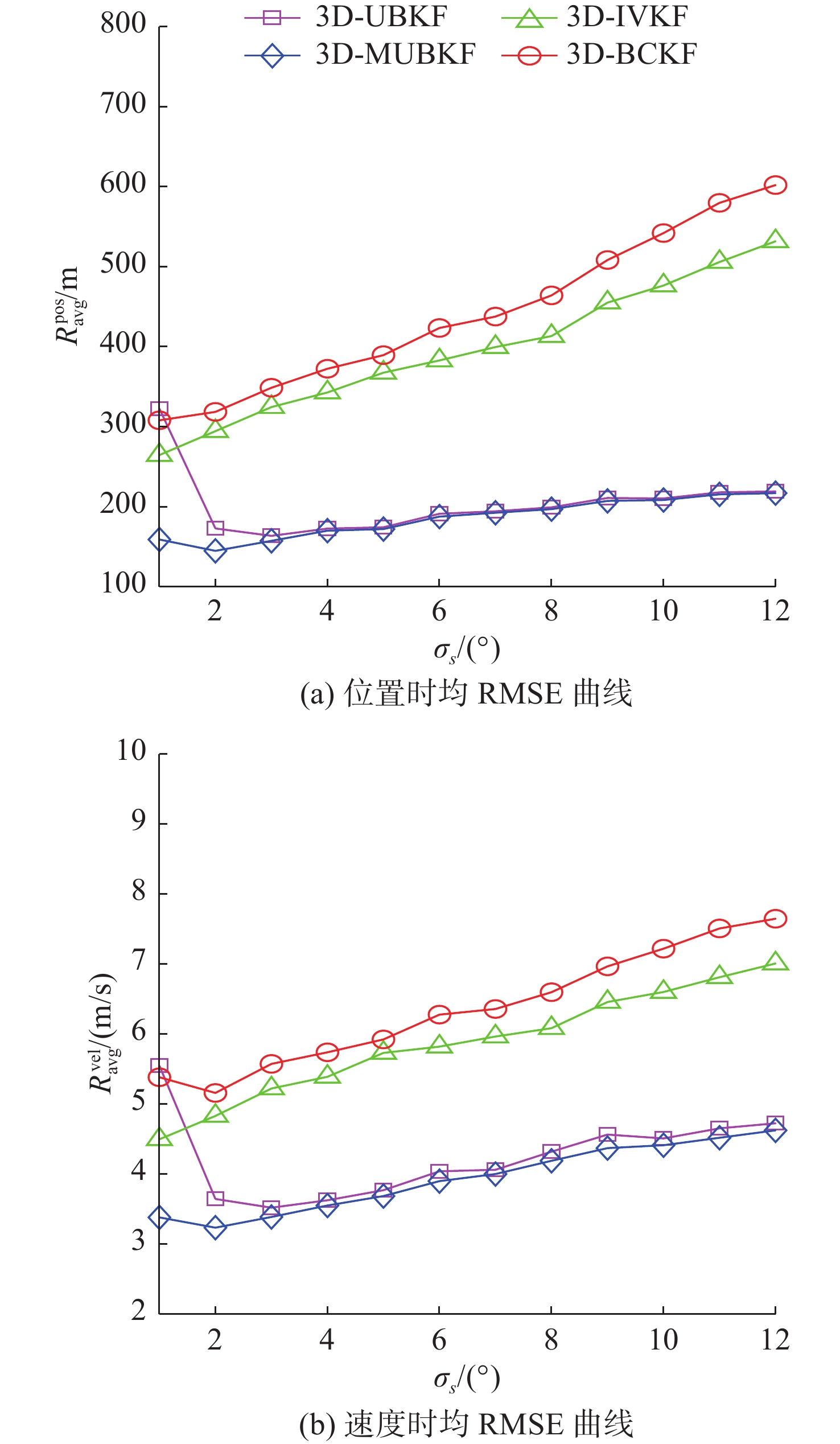
图 5 机动目标跟踪中不同算法时均RMSE曲线(
${{\boldsymbol{k_r}}} = {\bf{200}}\% $ ,$\;{\boldsymbol{\rho}} = {\bf{4}} $ )Figure 5. Time-averaged RMSE curves of different algorithms in maneuvering target tracking (
${{\boldsymbol{k_r}}} = {\bf{200}}\% $ ,$\;{\boldsymbol{\rho}} = {\bf{4}} $ )
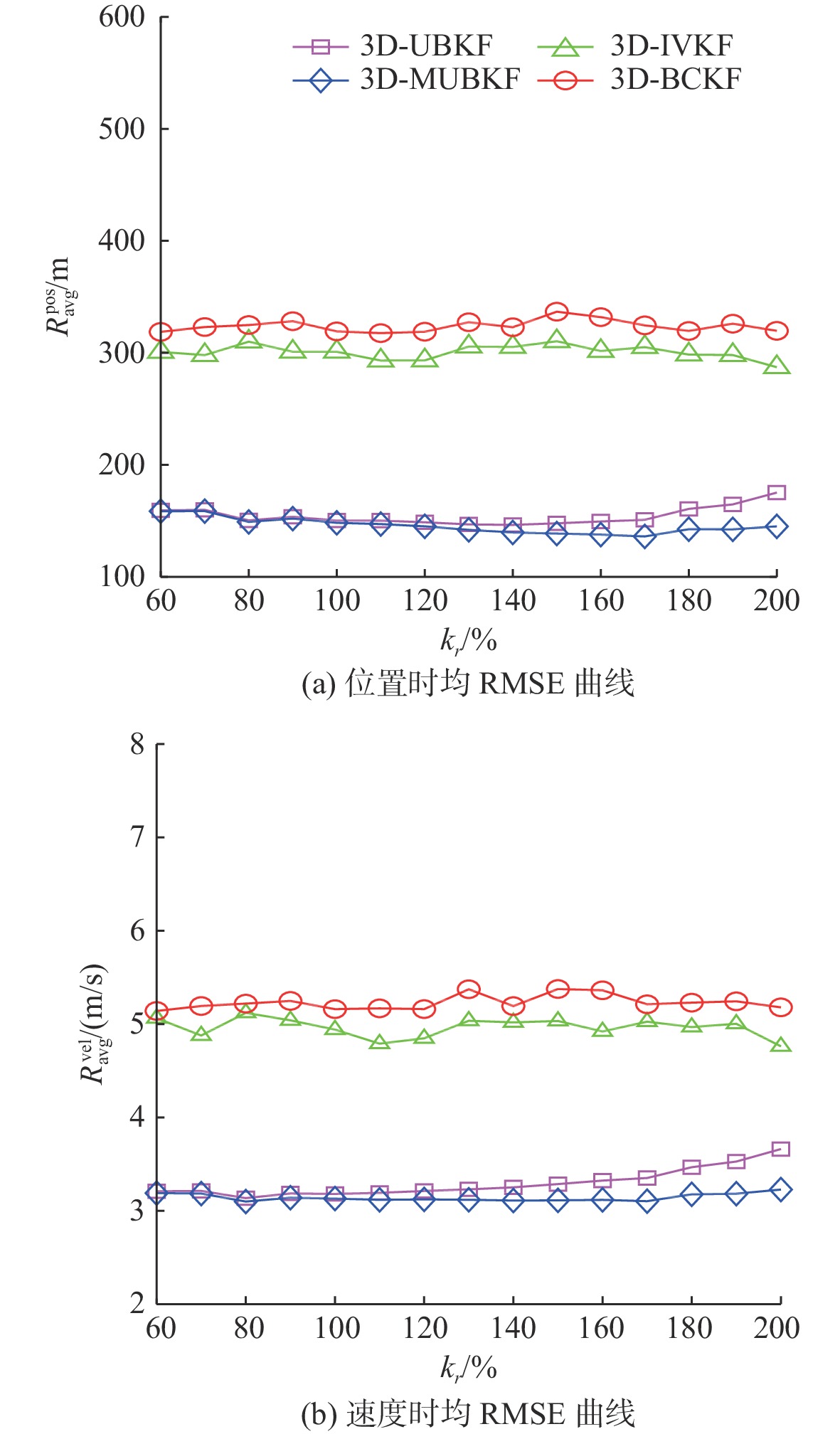
图 6 机动目标跟踪中不同算法时均RMSE曲线(
$\;{\boldsymbol{\rho}} = {\bf{4}} $ ,${{\boldsymbol{\sigma _s}}} = {\bf{2}}^\circ $ )Figure 6. Time-averaged RMSE curves of different algorith- ms in maneuvering target tracking (
$\;{\boldsymbol{\rho}} = {\bf{4}} $ ,${{\boldsymbol{\sigma _s}}} = {\bf{2}}^\circ $ )
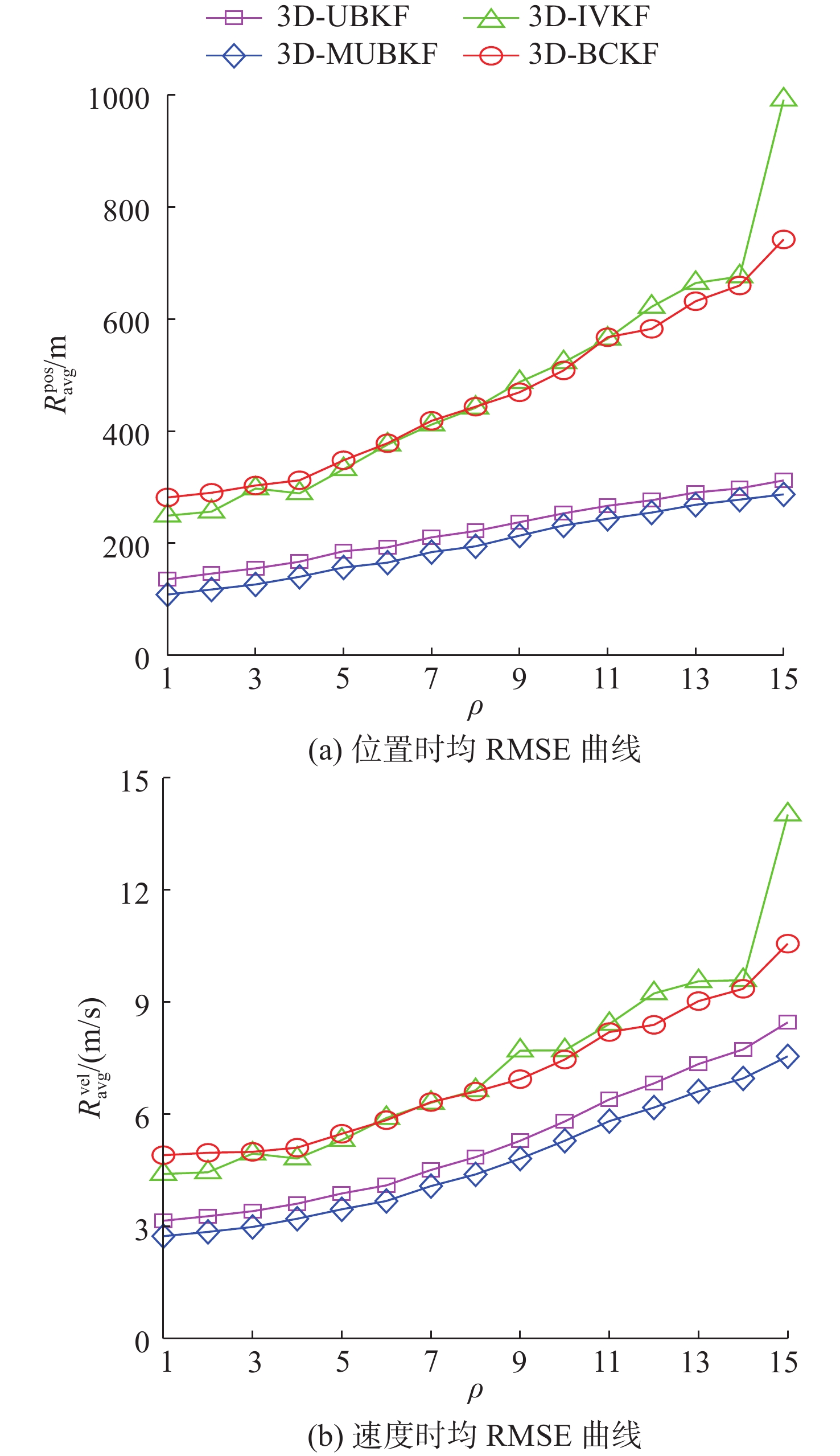
图 7 机动目标跟踪不同算法时均RMSE曲线(
${\boldsymbol{\sigma _s}} = 2^\circ $ 、${\boldsymbol{k_r}} = $ $ {\bf{200}}\% $ )Figure 7. Time-averaged RMSE curves of different algorithms in maneuvering target tracking (
${\boldsymbol{\sigma _s}} = 2^\circ $ ,${\boldsymbol{k_r}} = $ $ {\bf{200}}\% $ )表 1 不同矩阵运算对应的浮点操作次数
Table 1. Number of flops corresponding to different matrix operations
矩阵运算 浮点 ${\boldsymbol{A}} \pm {\boldsymbol{A}}$ nm ${\boldsymbol{AB}}$ 2nml-nl ${{\boldsymbol{C}}^{ - 1}}$ n3  下载: 导出CSV
下载: 导出CSV
表 2 4种算法计算复杂度
Table 2. Computational complexity of four algorithms
滤波步骤 3D-PLKF 3D-BCKF 3D-IVKF 3D-MUBKF 预测${{\boldsymbol{\hat x}}_{k|k - 1}}$ 2nx2−nx 2nx2−nx 2nx2−nx 2nx2−nx 预测${{\boldsymbol{\hat P}}_{k|k - 1}}$ 4nx3−nx2 4nx3−nx2 4nx3−nx2 4nx3−nx2 伪线性化 5mznx+5mz 5mznx+5mz 5mznx+5mz 12mznx+25mz−1 ${{\boldsymbol{K}}_k}$ 6nx2mz+2nxmz2−3mznx+mz3 6nx2mz+2nxmz2−
3mznx+mz312nx2mz+4nxmz2+
10mznx+2mz36nx2mz+2nxmz2−
3mznx+mz3估计${{\boldsymbol{\hat x}}_{k|k}}$ 4mznx 9mznx+2nx2−nx 13mznx+2nx2−nx 4mznx 估计${{\boldsymbol{\hat P}}_{k|k}}$ 2nx2mz+2nx2 2nx2mz+2nx2 4nx2mz+4nx2 2nx2mz+2nx2 总复杂度 4nx3+3nx2+8nx2mz+
2nxmz2+6mznx−nx+
5mz+mz34nx3+5nx2+8nx2mz+
2nxmz2+11mznx−2nx+
5mz+mz34nx3+7nx2+16nx2mz+
4nxmz2+28mznx−2nx+
5mz+2mz34nx3+3nx2+8nx2mz+
2nxmz2+13mznx−nx+
25mz+mz3−1
下载: 导出CSV
-
[1] 郑艺, 王明洲. 一种滑动后向递推的 EKF 纯方位目标跟踪方法[J]. 水下无人系统学报, 2020, 28(6): 663-669.Zheng Yi, Wang Mingzhou. Sliding backward recursive ekf bearings-only target tracking method[J]. Journal of Unmanned Undersea Systems, 2020, 28(6): 663-669. [2] 苏骏, 李亚安, 陈晓, 等. 双观测站水下纯方位多目标跟踪的数据关联算法[J]. 水下无人系统学报, 2018, 26(2): 115-121.Su Jun, Li Yaan, Chen Xiao, et al. Data association algorithm for multi-target tracking of underwater bearings-only systems with double observation stations[J]. Journal of Unmanned Undersea Systems, 2018, 26(2): 115-121. [3] Xu S, Doğançay K, Hmam H. Distributed pseudolinear estimation and UAV path optimization for 3D AOA target tracking[J]. Signal Processing, 2017, 133: 64-78. doi: 10.1016/j.sigpro.2016.10.012 [4] Hou X, Zhou J, Yang Y, et al. Adaptive two-step bearing-only underwater uncooperative target tracking with uncertain underwater disturbances[J]. Entropy, 2021, 23(7): 907. doi: 10.3390/e23070907 [5] 赵振轶, 李亚安, 陈晓, 等. 基于双观测站的水下机动目标被动跟踪[J]. 水下无人系统学报, 2018, 26(1): 40-45.Zhao Zhenyi, Li Yaan, Chen Xiao, et al. Passive tracking of underwater maneuvering target based on double observation station[J]. Journal of Unmanned Undersea Systems, 2018, 26(1): 40-45. [6] Luo J, Han Y, Fan L. Underwater acoustic target tracking: A review[J]. Sensors, 2018, 18(1): 112. [7] Badriasl L, Dogancay K. Three-dimensional target motion analysis using azimuth/elevation angles[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(4): 3178-3194. doi: 10.1109/TAES.2014.120251 [8] Aidala V J. Kalman filter behavior in bearings-only tracking applications[J]. IEEE Transactions on Aerospace and Electronic Systems, 1979, 15(1): 29-39. doi: 10.1109/TAES.1979.308793 [9] Lin X D, Kirubarajan T, Bar-Shalom Y, et al. Comparison of EKF, pseudomeasurement, and particle filters for a bearing-only target tracking problem[C]//Proceedings of Spie the International Society for Optical Engineering 2007. Orlando, America: SPIE, 2002: 240-250. [10] Nguyen N H, Doğançay K. Improved pseudolinear Kalman filter algorithms for bearings-only target tracking[J]. IEEE Transactions on Signal Processing, 2017, 65(23): 6119-6134. doi: 10.1109/TSP.2017.2749207 [11] Huang Z H, Chen S J, Hao C P, et al. Bearings-only target tracking with an unbiased pseudolinear Kalman filter[J]. Remoto Sensing, 2021, 13(15): 1-19. [12] Nguyen N H, Doğançay K. Instrumental variable based Kalman filter algorithm for three-dimensional AOA target tracking[J]. IEEE Signal Processing Letters, 2018, 25(10): 1605-1609. doi: 10.1109/LSP.2018.2869108 [13] Wang Y, Ho K C. An asymptotically efficient estimator in closed-form for 3-D AOA localization using a sensor network[J]. IEEE Transactions on Wireless Communications, 2015, 14(12): 6524-6535. doi: 10.1109/TWC.2015.2456057 [14] Yang L, Ho K C. Alleviating sensor position error in source localization using calibration emitters at inaccurate locations[J]. IEEE Transactions on Signal Processing, 2010, 58(1): 67-83. doi: 10.1109/TSP.2009.2028947 [15] Ma Z H, Ho K C. A study on the effects of sensor position error and the placement of calibration emitter for source localization[J]. IEEE Transactions on Wireless Communications, 2014, 13(10): 5440-5452. doi: 10.1109/TWC.2014.2341609 [16] Ho K C, Yang L. On the use of a calibration emitter for source localization in the presence of sensor position uncertainty[J]. IEEE Transactions on Signal Processing, 2008, 56(12): 5758-5772. doi: 10.1109/TSP.2008.929870 [17] Farina A. Target tracking with bearings-only measurements[J]. Signal Process, 1999, 78(1): 61-78. doi: 10.1016/S0165-1684(99)00047-X [18] Stoica P, Nehorai A. MUSIC, maximum likelihood and Cramer-Rao bound[J]. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1989, 37(5): 720-741. doi: 10.1109/29.17564 [19] Pang F F, Doğançay K, Nguyen N H, et al. AOA pseudolinear target motion analysis in the presence of sensor location errors[J]. IEEE Transactions on Signal Processing, 2020, 68: 3385-3399. doi: 10.1109/TSP.2020.2998896 [20] Dogancay K. Bias compensation for the bearings-only pseudolinear target track estimator[J]. IEEE Transactions on Signal Processing, 2005, 54(1): 59-68. -

 下载:
下载:















 点击查看大图
点击查看大图
计量
- 文章访问数: 578
- HTML全文浏览量: 151
- PDF下载量: 88
- 被引次数: 0